Moving towards a Network of Autonomous UAS Atmospheric Profiling Stations for Observations in the Earth’s Lower Atmosphere: The 3D Mesonet Concept

 , , , , , , ,
, , , , , , ,
Abstract
1. Introduction
2. Overview of the 3D Mesonet Concept
2.1. Growth of WxUAS
2.2. Conceptual Framework of the 3D Mesonet
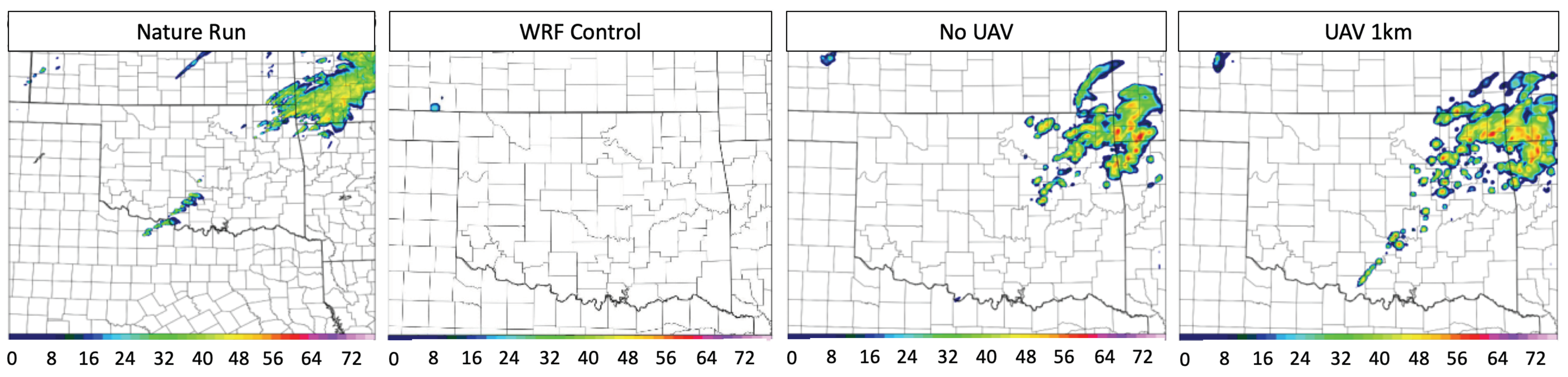
2.3. Impact of Data on Weather Forecasting
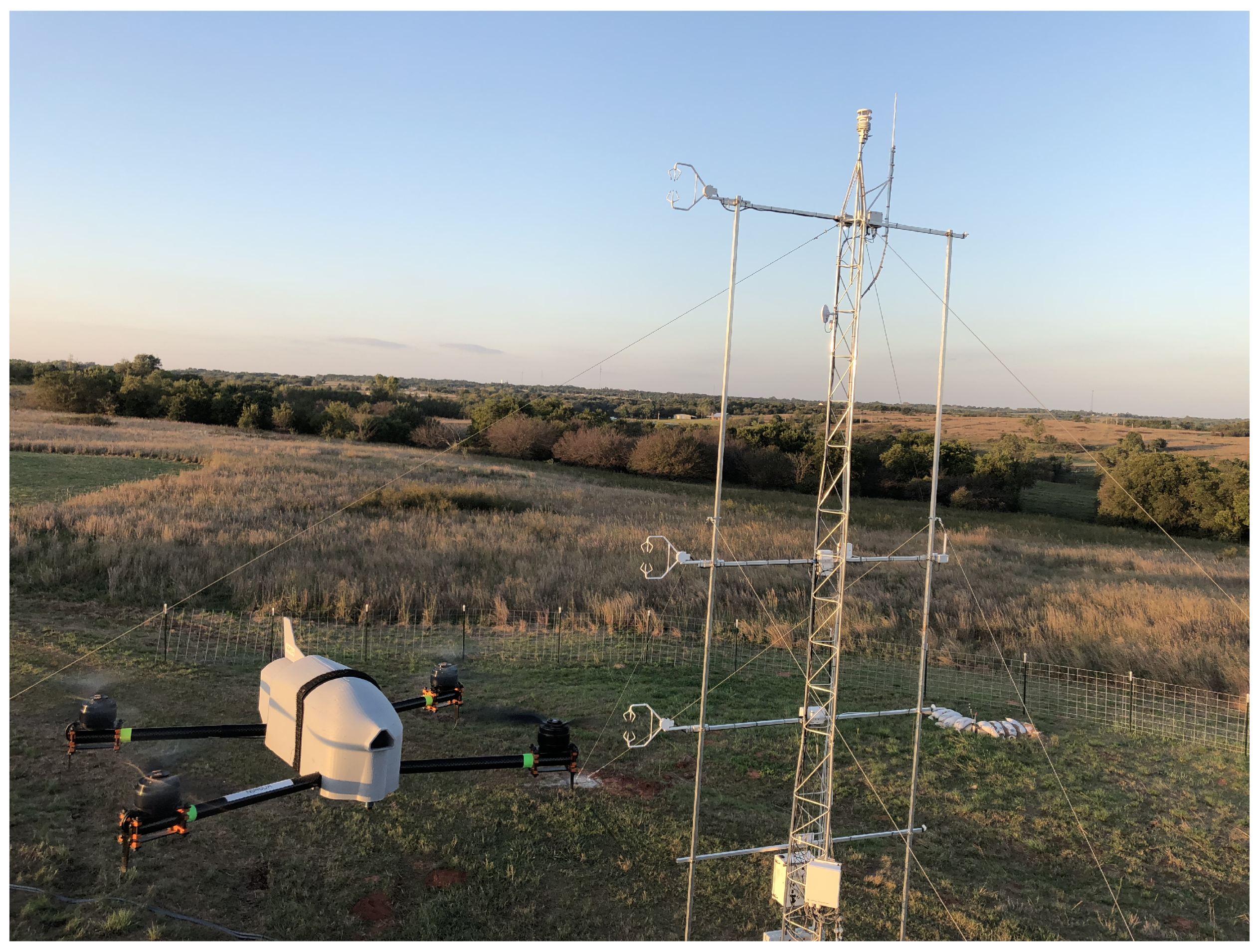
3. Platform and Sensor Development
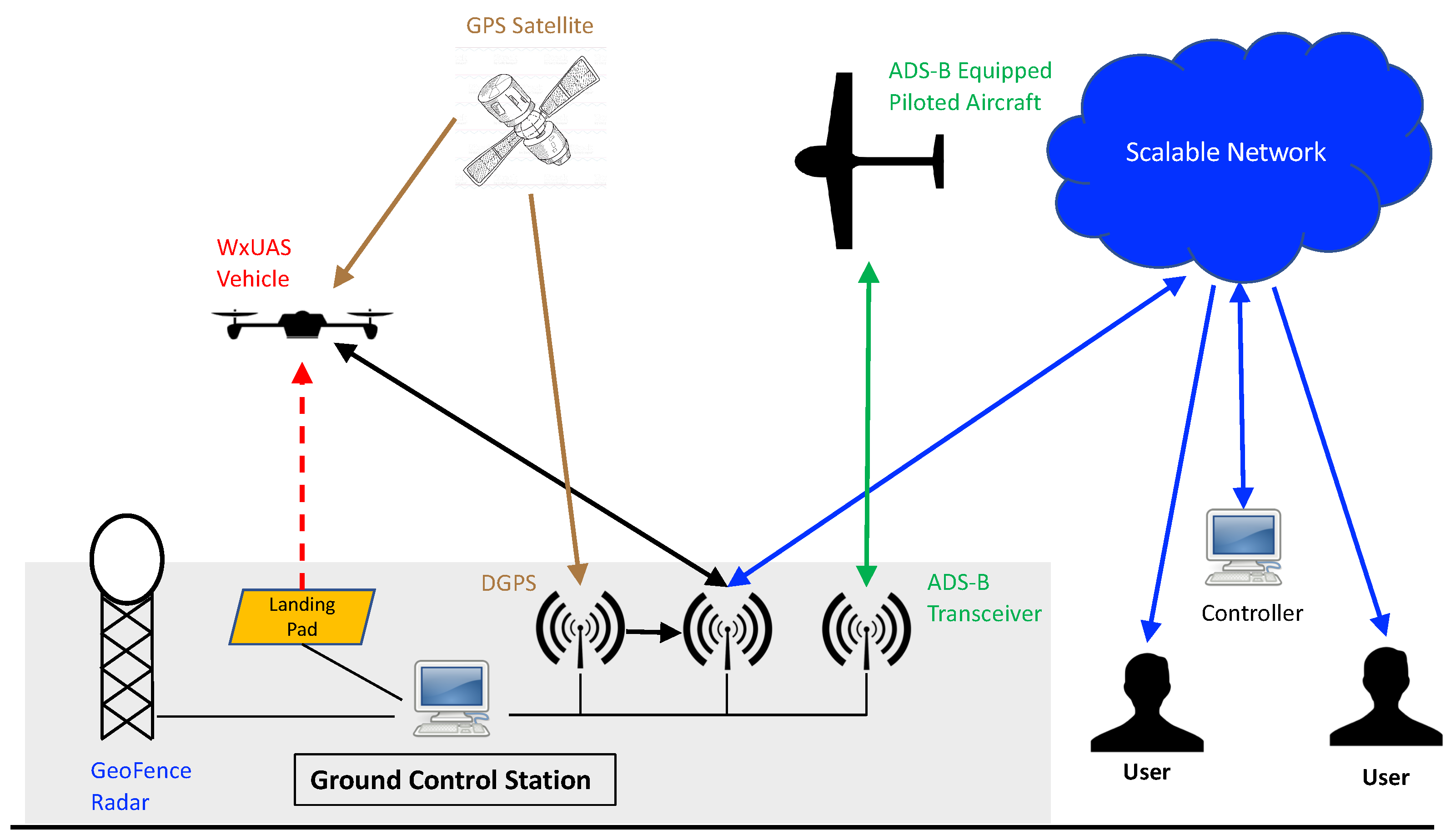
4. Supporting Components of the 3D Mesonet
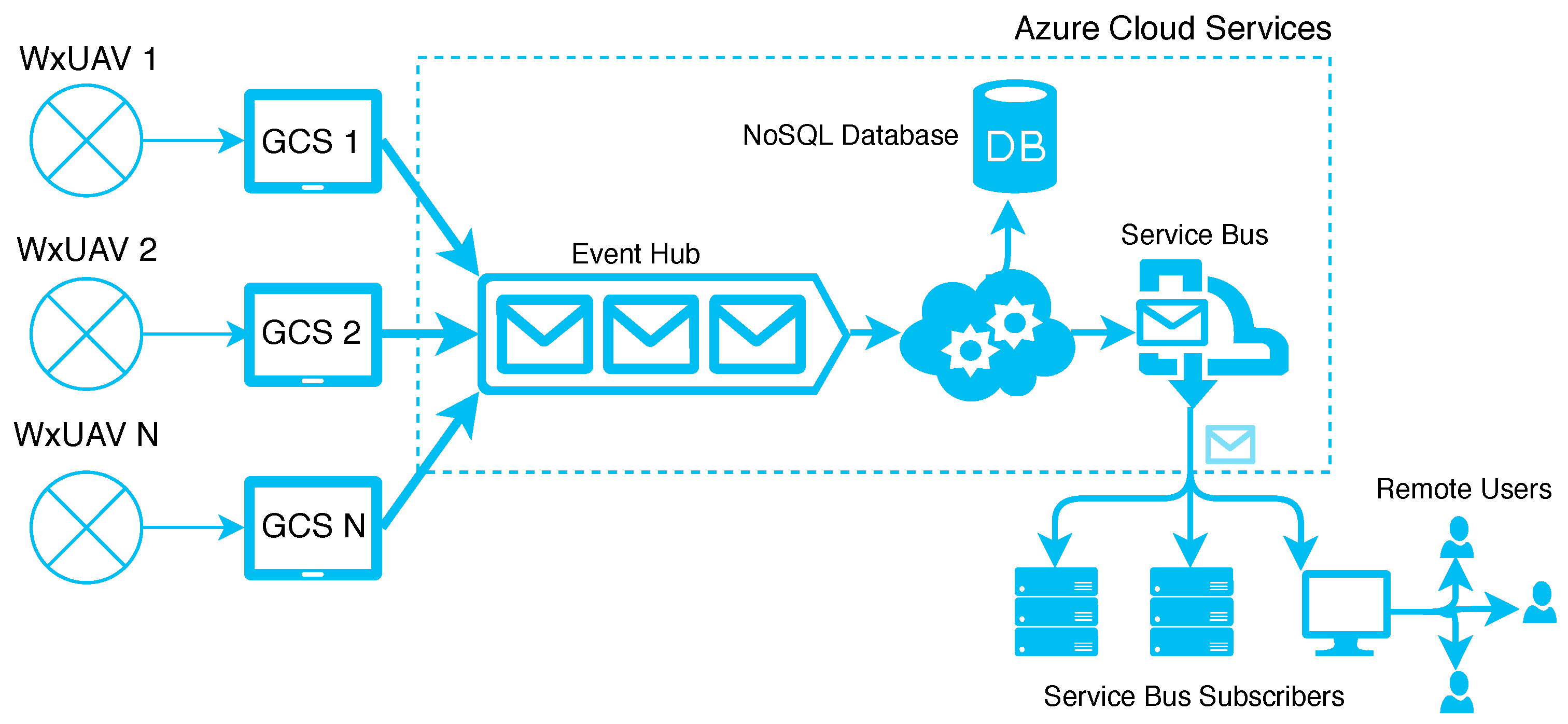
4.1. Ground Control Station
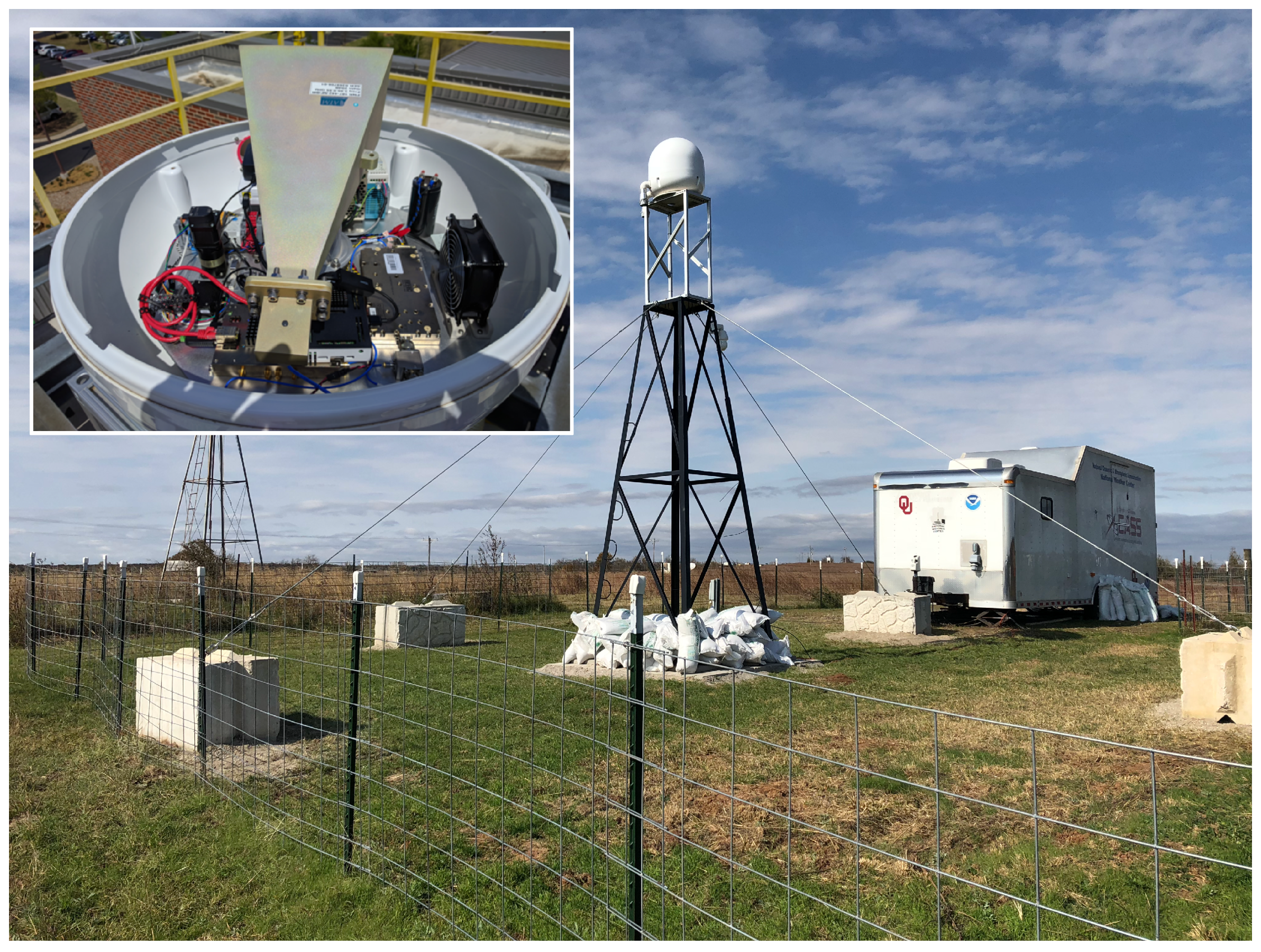
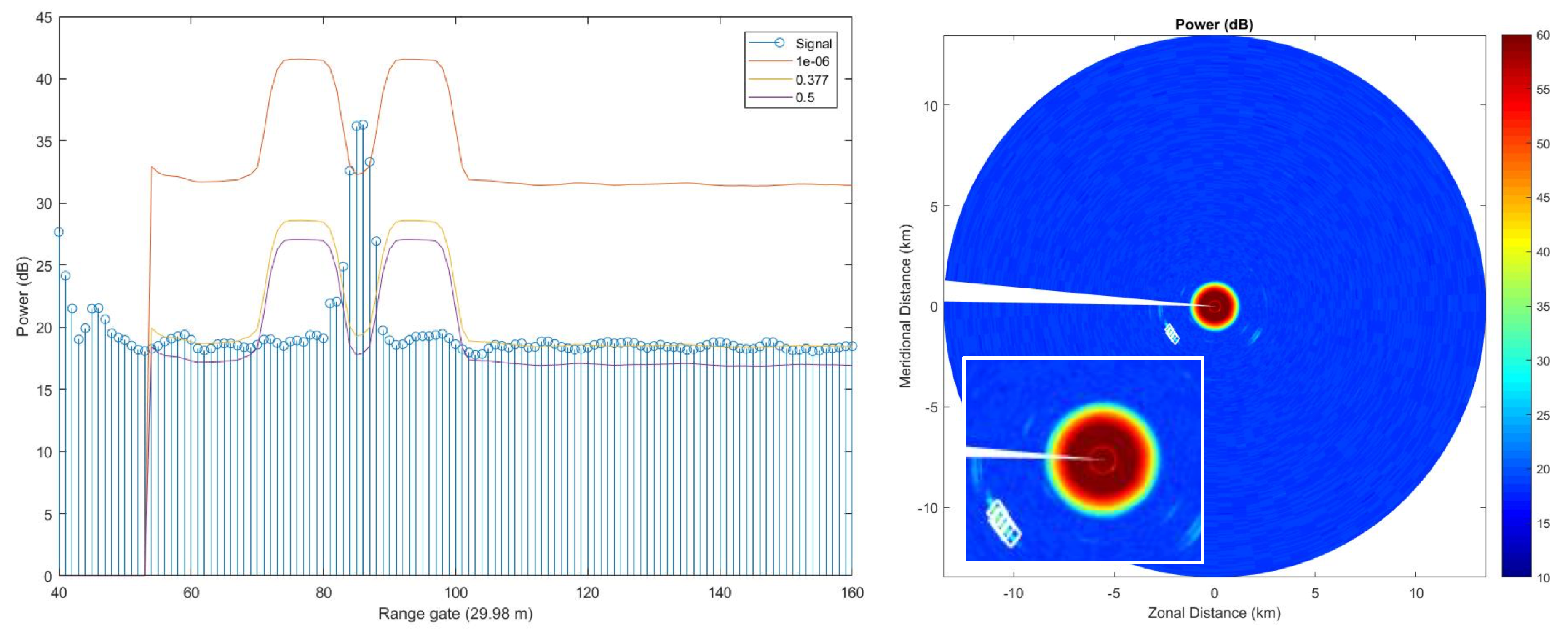
4.2. Risk Mitigation: GeoFence Radar
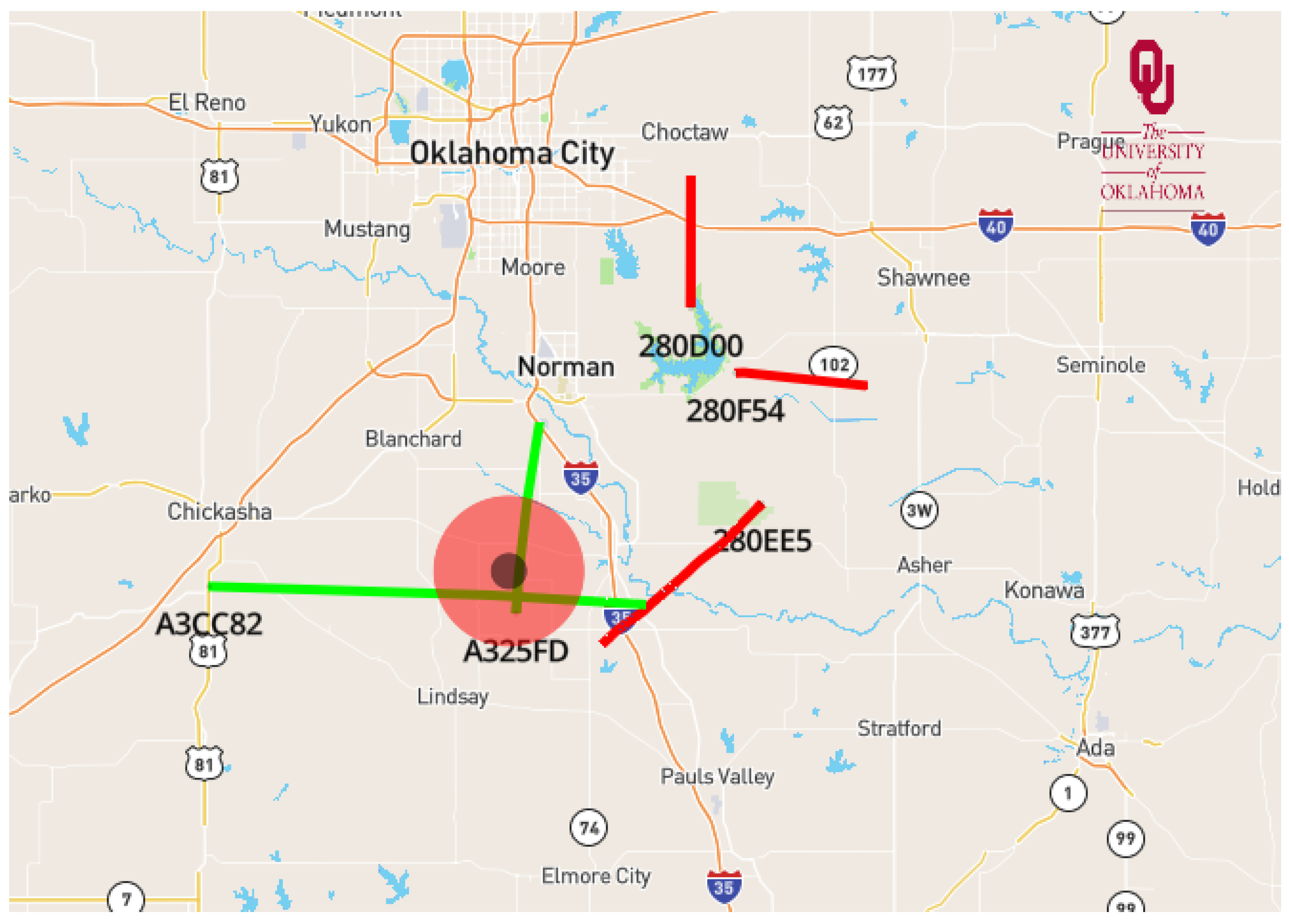
4.3. Risk Mitigation: Automatic Dependent Surveillance-Broadcast (ADS-B)
5. Data Processing, Distribution, and Visualization
5.1. Data Processing, Distribution, and Visualization
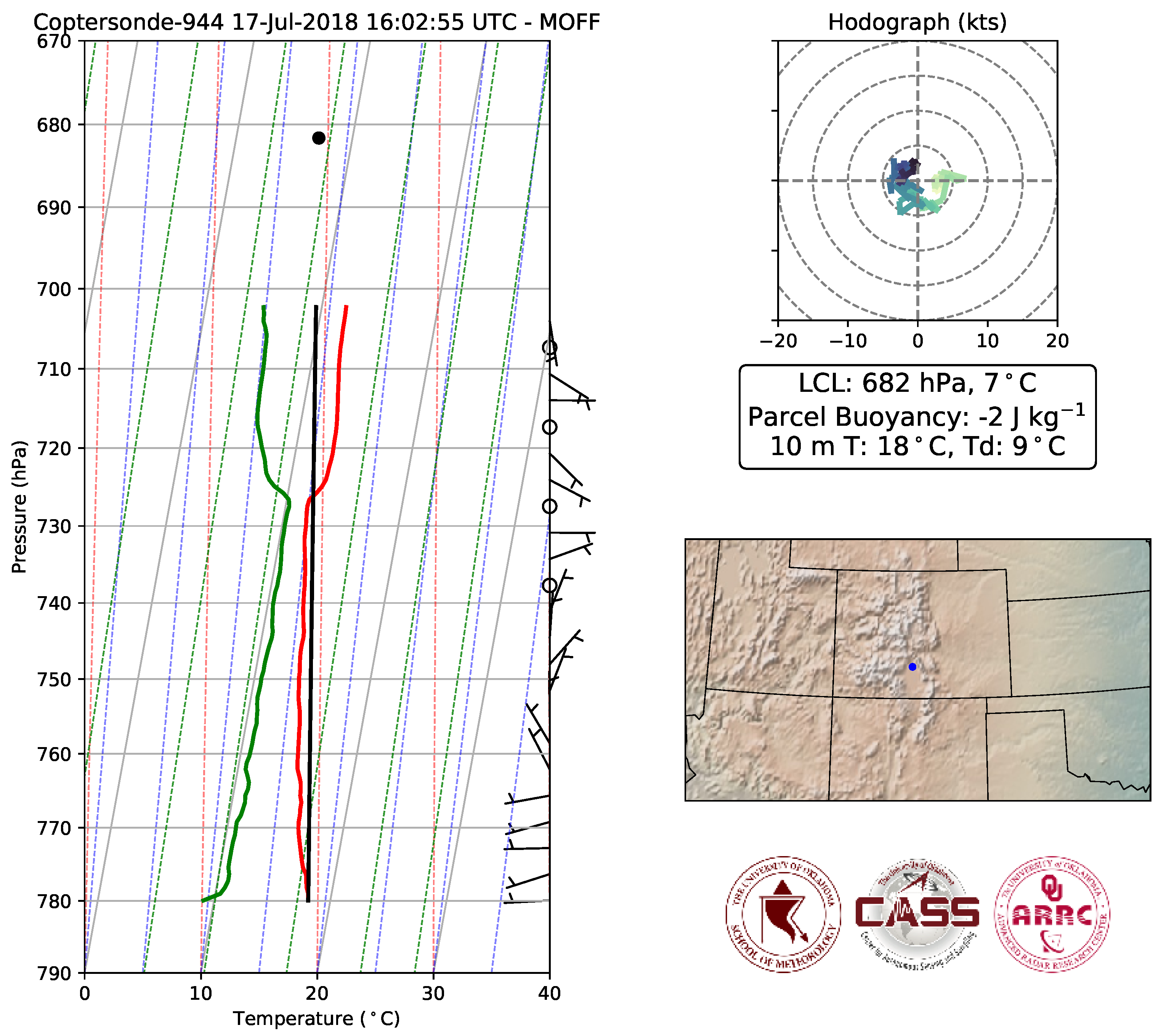
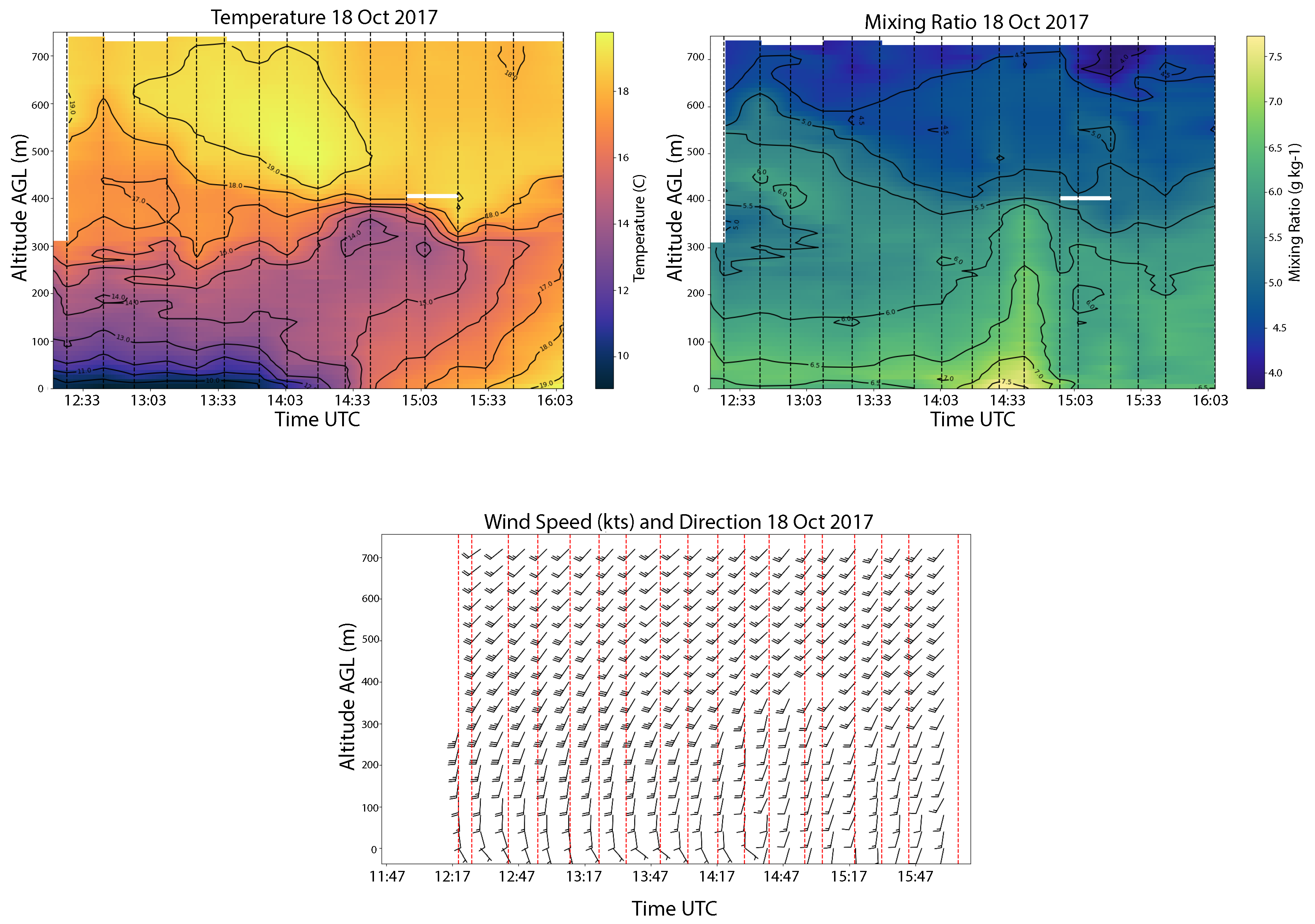
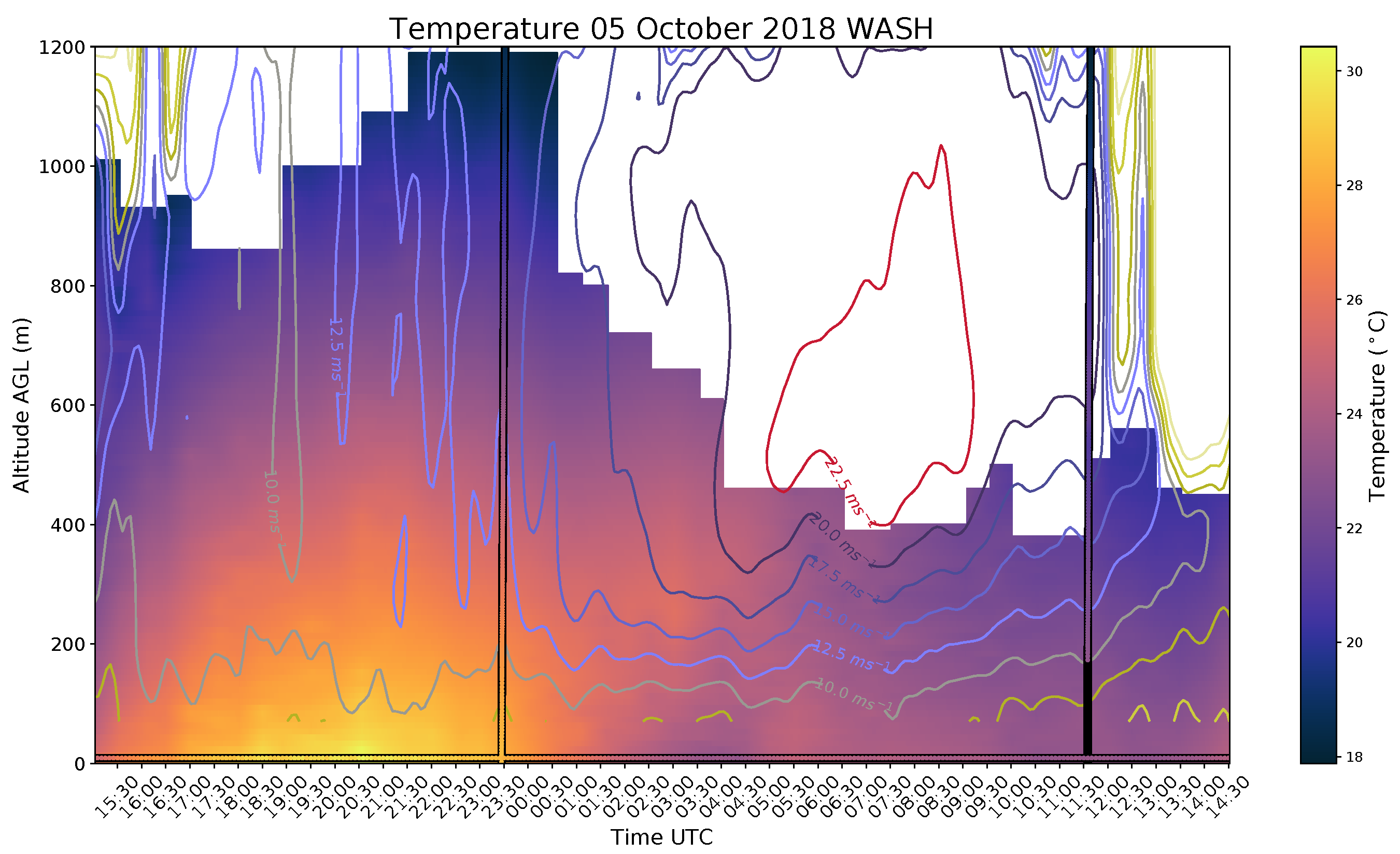
5.2. Data Examples
6. Conclusions and Future Directions
Author Contributions
Funding
Conflicts of Interest
References
- Lazo, J.K.; Lawson, M.; Larsen, P.H.; Waldman, D.M. U.S. economic sensitivity to weather variability. Bull. Am. Meteorol. Soc. 2011, 6, 709–720. [Google Scholar] [CrossRef]
- Bloesch, J.; Gourio, F. The effect of winter weather on U.S. economic activity. Econ. Perspect. 2015, 39, 1–20. [Google Scholar]
- World Meteorological Organization. WMO Statement on the State of the Global Climate in 2017; Technical Report WMO-No. 1212; World Meteorological Organization: Geneva, Switzerland, 2018. [Google Scholar]
- National Research Council. Observing Weather and Climate from the Ground Up: A Nationwide Network of Networks; National Academy Press: Washington, DC, USA, 2009. [Google Scholar] [CrossRef]
- Hardesty, R.M.; Hoff, R.M. Thermodynamic Profiling Technologies Workshop Report to the National Science Foundation and the National Weather Service; Technical Report NCAR/TN-488+STR; National Center for Atmospheric Research: Boulder, CO, USA, 2012. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Thriving on Our Changing Planet: A Decadal Strategy for Earth Observation from Space; The National Academies Press: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. The Future of Atmospheric Boundary Layer Observing, Understanding, and Modeling: Proceedings of a Workshop; The National Academies Press: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Geerts, B.; Raymond, D.; Barth, M.; Detwiler, A.; Klein, P.; Lee, W.C.; Markowski, P.; Mullendore, G. Community Workshop on Developing Requirements for In Situ and Remote Sensing Capabilities in Convective and Turbulent Environments (C-RITE); Technical Report; UCAR/NCAR Earth Observing Laboratory: Boulder, CO, USA, 2017. [Google Scholar]
- Vömel, H.; Argrow, B.; Axisa, D.; Chlson, P.; Ellis, S.; Fladeland, M.; Frew, E.; Jacob, J.; Lord, M.; Moore, J.; et al. The NCAR/EOL Community Workshop on Unmanned Aircraft Systems for Atmospheric Research. 2018. Available online: https://www.eol.ucar.edu/node/13299 (accessed on 15 November 2018).
- Banacos, P.C.; Schultz, D.M. The Use of Moisture Flux Convergence in Forecasting Convective Initiation: Historical and Operational Perspectives. Weather. Forecast. 2005, 20, 351–366. [Google Scholar] [CrossRef]
- Gasperoni, N.A.; Xue, M.; Palmer, R.D.; Gao, J. Sensitivity of Convective Initiation Prediction to Near-Surface Moisture When Assimilating Radar Refractivity: Impact Tests Using OSSEs. J. Atmos. Ocean. Technol. 2013, 30, 2281–2302. [Google Scholar] [CrossRef]
- Markowski, P.M.; Straka, J.M.; Rasmussen, E.N.; Blanchard, D.O. Variability of storm-relative helicity during VORTEX. Mon. Weather Rev. 1998, 126, 2959–2971. [Google Scholar] [CrossRef]
- Coffer, B.E.; Parker, M.D. Simulated supercells in nontornadic and tornadic VORTEX2 environments. Mon. Weather Rev. 2017, 145, 149–180. [Google Scholar] [CrossRef]
- Kumer, V.M.; Reuder, J.; Furevik, B.R. A comparison of LIDAR and radiosonde wind measurements. Energy Procedia 2014, 53, 214–220. [Google Scholar]
- NASA. NASA 2018 Strategic Plan; National Aeronautics and Space Administration: Washington, DC, USA, 2018.
- Illingworth, A.J.; Cimini, D.; Haefele, A.; Haeffelin, M.; Hervo, M.; Kotthaus, S.; Löhnert, U.; Martinet, P.; Mattis, I.; O’Connor, E.J.; et al. How Can Existing Ground-Based Profiling Instruments Improve European Weather Forecasts? Bull. Am. Meteorol. Soc. 2019, 100, 605–619. [Google Scholar] [CrossRef]
- Manninen, A.J.; Marke, T.; Tuononen, M.; O’Connor, E.J. Atmospheric Boundary Layer Classification with Doppler Lidar. J. Geophys. Res. Atmos. 2018, 123, 8172–8189. [Google Scholar] [CrossRef]
- Lothon, M.; Lohou, F.; Pino, D.; Couvreux, F.; Pardyjak, E.R.; Reuder, J.; Vilà-Guerau de Arellano, J.; Durand, P.; Hartogensis, O.; Legain, D.; et al. The BLLAST Field Experiment: Boundary-Layer Late Afternoon and Sunset Turbulence. Atmos. Chem. Phys. 2014, 14, 10931–10960. [Google Scholar] [CrossRef]
- Klein, P.; Bonin, T.A.; Newman, J.F.; Turner, D.D.; Chilson, P.B.; Wainwright, C.E.; Blumberg, W.G.; Mishra, S.; Carney, M.; Jacobsen, E.P.; et al. LABLE: A multi-institutional, student-led, atmospheric boundary-layer experiment. Bull. Am. Meteorol. Soc. 2015, 96, 1743–1764. [Google Scholar] [CrossRef]
- Fernando, H.J.S.; Mann, J.; Palma, J.M.L.M.; Lundquist, J.K.; Barthelmie, R.J.; Belo-Pereira, M.; Brown, W.O.J.; Chow, F.K.; Gerz, T.; Hocut, C.M.; et al. The Perdigão: Peering into Microscale Details of Mountain Winds. Bull. Am. Meteorol. Soc. 2019, 100, 799–819. [Google Scholar] [CrossRef]
- Grubišić, V.; Doyle, J.D.; Kuettner, J.; Mobbs, S.; Smith, R.B.; Whiteman, C.D.; Dirks, R.; Czyzyk, S.; Cohn, S.A.; Vosper, S.; et al. The terrain-induced rotor experiment. Bull. Am. Meteorol. Soc. 2008, 89, 1513–1534. [Google Scholar] [CrossRef]
- Dabberdt, W.F.; Schlatter, T.W.; Carr, F.H.; Friday, E.W.J.; Jorgensen, D.; Koch, S.; Pirone, M.; Ralph, F.M.; Sun, J.; Welsh, P.; et al. Multifunctioning mesoscale observing networks. Bull. Am. Meteorol. Soc. 2005, 86, 961–982. [Google Scholar] [CrossRef]
- Mahmood, R.; Boyles, R.; Brinson, K.; Fiebrich, C.; Foster, S.; Hubbard, K.; Robinson, D.; Andresen, J.; Leathers, D. Mesonets: Mesoscale weather and climate observations for the United States. Bull. Am. Meteorol. Soc. 2017, 98, 1349–1361. [Google Scholar] [CrossRef]
- Ziokowska, J.R.; Fiebrich, C.A.; Carlson, J.D.; Melvin, A.D.; Sutherland, A.J.; Kloesel, K.A.; McManus, G.D.; Illston, B.G.; Hocker, J.E.; Reyes, R. Benefits and beneficiaries of the Oklahoma Mesonet: A multisectoral ripple effect analysis. Weather Clim. Soc. 2017, 9. [Google Scholar] [CrossRef]
- Yang, J.; Min, Q. Retrieval of atmospheric profiles in the New York State Mesonet using one-dimensional variational algorithm. J. Geophys. Res. Atmos. 2018, 123, 7563–7575. [Google Scholar] [CrossRef]
- Schroeder, J.L.; Burgett, W.S.; Haynie, K.B.; Sonmez, I.; Skwira, G.D.; Doggett, A.L.; Lipe, J.W. The West Texas Mesonet: A Technical Overview. J. Atmos. Ocean. Technol. 2005, 22, 211–222. [Google Scholar] [CrossRef]
- Brock, F.V.; Crawford, K.C.; Elliott, R.L.; Cuperus, G.W.; Stadler, S.J.; Johnson, H.L.; Eilts, M.D. Oklahoma Mesonet: A Technical Overview. J. Atmos. Ocean. Technol. 1995, 12, 5–19. [Google Scholar] [CrossRef]
- McPherson, R.A.; Fiebrich, C.A.; Crawford, K.C.; Kilby, J.R.; Grimsley, D.L.; Martinez, J.E.; Basara, J.B.; Illston, B.G.; Morris, D.A.; Kloesel, K.A.; et al. Statewide Monitoring of the Mesoscale Environment: A Technical Update on the Oklahoma Mesonet. J. Atmos. Ocean. Technol. 2007, 24, 301–321. [Google Scholar] [CrossRef]
- Teixeira, J.; Stevens, B.; Bretherton, C.S.; Cederwall, R.; Klein, S.A.; Lundquist, J.K.; Doyle, J.D.; Golaz, J.C.; Holtslag, A.A.M.; Randall, D.A.; et al. Paramaterization of the atmospheric boundary layer: A view from just above the inversion. Bull. Am. Meteorol. Soc. 2008, 89, 453–458. [Google Scholar] [CrossRef]
- Reuder, J.; Brisset, P.; Jonassen, M.; Müller, M.; Meyer, S. The Small Unmanned Meteorological Observer SUMO: A new tool for atmospheric boundary layer research. Meteorol. Z. 2009, 18, 141–147. [Google Scholar] [CrossRef]
- Martin, S.; Bange, J.; Beyrich, F. Meteorological profiling of the lower troposphere using the research UAV “M2AV Carolo”. Atmos. Meas. Tech. 2011. [Google Scholar] [CrossRef]
- Wildmann, N.; Hofsäß, M.; Weimer, F.; Joos, A.; Bange, J. MASC a small Remotely Piloted Aircraft (RPA) for wind energy research. Adv. Sci. Res. 2014, 11, 55–61. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of small fixed-wing unmanned aircraft for meteorological sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Brosy, C.; Krampf, K.; Zeeman, M.; Wolf, B.; Junkermann, W.; Schäfer, K.; Emeis, S.; Kunstmann, H. Simultaneous multicopter-based air sampling and sensing of meteorological variables. Atmos. Meas. Tech. 2017, 10, 2773–2784. [Google Scholar] [CrossRef]
- Hemingway, B.L.; Frazier, A.E.; Elbing, B.R.; Jacob, J.D. Vertical sampling scales for the atmospheric boundary layer measurements from small unmanned aircraft systems (sUAS). Atmosphere 2017, 8, 176. [Google Scholar] [CrossRef]
- Lee, T.R.; Buban, M.; Dumas, E.; Baker, C.B. A new technique to estimate sensible heat fluxes around micrometeorological towers using small unmanned aircraft systems. J. Atmos. Ocean. Technol. 2017, 34, 2103–2112. [Google Scholar] [CrossRef]
- Koch, S.E.; Fengler, M.; Chilson, P.B.; Elmore, K.L.; Argrow, B.; Andra, D.L., Jr.; Lindley, T. On the Use of Unmanned Aircraft for Sampling Mesoscale Phenomena in the Preconvective Boundary Layer. J. Atmos. Ocean. Technol. 2018, 35, 2265–2288. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Waugh, S.; Duthoit, S.; Chilson, P.B. Considerations for temperature sensor placement on rotary-wing unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 5519–5530. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Bell, T.M.; Pillar-Little, E.A.; Chilson, P.B. Environmental and sensor integration influences on temperature measurements by rotary-wing unmanned aircraft systems. Sensors 2019, 19, 1470. [Google Scholar] [CrossRef] [PubMed]
- Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Small Unmanned Aircraft Systems (sUAS) in Atmospheric Science: Measurement Intercomparison for LAPSE-RATE. Sensors 2019. submitted. [Google Scholar] [CrossRef] [PubMed]
- Moore, A. Observation System Simulation Experiment Studies on the Use of Small UAV for Boundary-Layer Sampling. Master’s Thesis, University of Oklahoma, Norman, OK, USA, 2018. [Google Scholar]
- Xue, M.; Droegemeier, K.; Wong, K. The advanced regional prediction system (ARPS)—A multi-scale nonhydrostatic atmospheric simulation and prediction model. Part 1: Model dynamics and verification. Meteorol. Atmos. Phys. 2000, 75, 161–193. [Google Scholar] [CrossRef]
- Neumann, P.P.; Bartholmai, M. Real-time wind estimation on a micro unmanned aerial vehicle using its inertial measurement unit. Sens. Actuators A Phys. 2015, 235, 300–310. [Google Scholar] [CrossRef]
- Palomaki, R.T.; Rose, N.T.; van den Bossche, M.; Sherman, T.J.; Wekker, S.F.J.D. Wind estimation in the lower atmosphere using multi-rotor aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- Kanneganti, S.T.; Chilson, P.B.; Huck, R. Visualization and Prediction of Aircraft trajectory using ADS-B. In Proceedings of the NAECON 2018—IEEE National Aerospace and Electronics Conference, Dayton, OH, USA, 23–26 July 2018; pp. 529–532. [Google Scholar] [CrossRef]
- Ramanathan, V.; Ramana, M.V.; Roberts, G.; Kim, D.; Corrigan, C.; Chung, C.; Winker, D. Warming trends in Asia amplified by brown cloud solar absorption. Nature 2007, 448, 575. [Google Scholar] [CrossRef] [PubMed]
- Wagner, T.J.; Klein, P.M.; Turner, D.D. A new generation of ground-based mobile platforms for active and passive profiling of the boundary layer. Bull. Am. Meteorol. Soc. 2019. [Google Scholar] [CrossRef]
- Lupu, C.; Gauthier, P.; Laroche, S. Evaluation of the Impact of Observations on Analyses in 3D- and 4D-Var Based on Information Content. Mon. Weather. Rev. 2011, 139, 726–737. [Google Scholar] [CrossRef]
- de Azevedo, H.B.; de Gonçalves, L.G.G.; Bastarz, C.F.; Silveira, B.B. Observing System Experiments in a 3DVAR Data Assimilation System at CPTEC/INPE. Weather. Forecast. 2017, 32, 873–880. [Google Scholar] [CrossRef]
- Stratman, D.R.; Brewster, K.A. Impact of assimilating CASA X-Band radar data for the 24 May 2011 tornadic storms using various microphysics schemes at 1-km resolution. In Proceedings of the 37th Conference on Radar Meteorology, Norman, OK, USA, 14–18 September 2015. [Google Scholar]
- Bloom, S.C.; Takacs, L.L.; da Silva, A.M.; Ledvina, D. Data Assimilation Using Incremental Analysis Updates. Mon. Weather Rev. 1996, 124, 1256–1271. [Google Scholar] [CrossRef]
- Brewster, K.A.; Stratman, D.R.; Thomas, K.W.; Carr, F.H. Incremental analysis updating with variable-depending timing applied to a real-time high resolution forecast system. In Proceedings of the 28th Conference on Severe Local Storms, Portland, OR, USA, 8 November 2016. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meteorological Variables and Accuracies | |
| Temperature | ±0.2 °C |
| Relative Humidity | ±5.0% |
| Pressure | ±1.0 hPa |
| Wind Speed | ±0.5 m·s |
| Wind Direction | ±5 Degrees Azimuth |
| Sensor Response Time | |
| Time | <5 s (Preferably <1 s) |
| Operational Environmental Conditions | |
| Temperature | −30 to 40 °C |
| Relative Humidity | 0–100% |
| Wind Speed | 0–35 m·s |
| Specification | Value |
|---|---|
| Input Voltage/Power | 44–57 V/500 mW (Power over Ethernet) |
| Size | 4.75” × 2.0 ” × 3.25” (box) 9.5” (antenna) |
| Weight | 340 g |
| MTL 1090 MHz | −88 dBm |
| Dynamic Range | −79 to 0 dBm |
| MTL 978 MHz | −93 dBm |
| Dynamic Range | −90 to −3 dBm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chilson, P.B.; Bell, T.M.; Brewster, K.A.; Britto Hupsel de Azevedo, G.; Carr, F.H.; Carson, K.; Doyle, W.; Fiebrich, C.A.; Greene, B.R.; Grimsley, J.L.; et al. Moving towards a Network of Autonomous UAS Atmospheric Profiling Stations for Observations in the Earth’s Lower Atmosphere: The 3D Mesonet Concept. Sensors 2019, 19, 2720. https://doi.org/10.3390/s19122720
Chilson PB, Bell TM, Brewster KA, Britto Hupsel de Azevedo G, Carr FH, Carson K, Doyle W, Fiebrich CA, Greene BR, Grimsley JL, et al. Moving towards a Network of Autonomous UAS Atmospheric Profiling Stations for Observations in the Earth’s Lower Atmosphere: The 3D Mesonet Concept. Sensors. 2019; 19(12):2720. https://doi.org/10.3390/s19122720
Chicago/Turabian StyleChilson, Phillip B., Tyler M. Bell, Keith A. Brewster, Gustavo Britto Hupsel de Azevedo, Frederick H. Carr, Kenneth Carson, William Doyle, Christopher A. Fiebrich, Brian R. Greene, James L. Grimsley, and et al. 2019. "Moving towards a Network of Autonomous UAS Atmospheric Profiling Stations for Observations in the Earth’s Lower Atmosphere: The 3D Mesonet Concept" Sensors 19, no. 12: 2720. https://doi.org/10.3390/s19122720
APA StyleChilson, P. B., Bell, T. M., Brewster, K. A., Britto Hupsel de Azevedo, G., Carr, F. H., Carson, K., Doyle, W., Fiebrich, C. A., Greene, B. R., Grimsley, J. L., Kanneganti, S. T., Martin, J., Moore, A., Palmer, R. D., Pillar-Little, E. A., Salazar-Cerreno, J. L., Segales, A. R., Weber, M. E., Yeary, M., & Droegemeier, K. K. (2019). Moving towards a Network of Autonomous UAS Atmospheric Profiling Stations for Observations in the Earth’s Lower Atmosphere: The 3D Mesonet Concept. Sensors, 19(12), 2720. https://doi.org/10.3390/s19122720