A Method to Determine BeiDou GEO/IGSO Orbital Maneuver Time Periods

Abstract
1. Introduction
2. Theory of Orbital Maneuver Period Detection
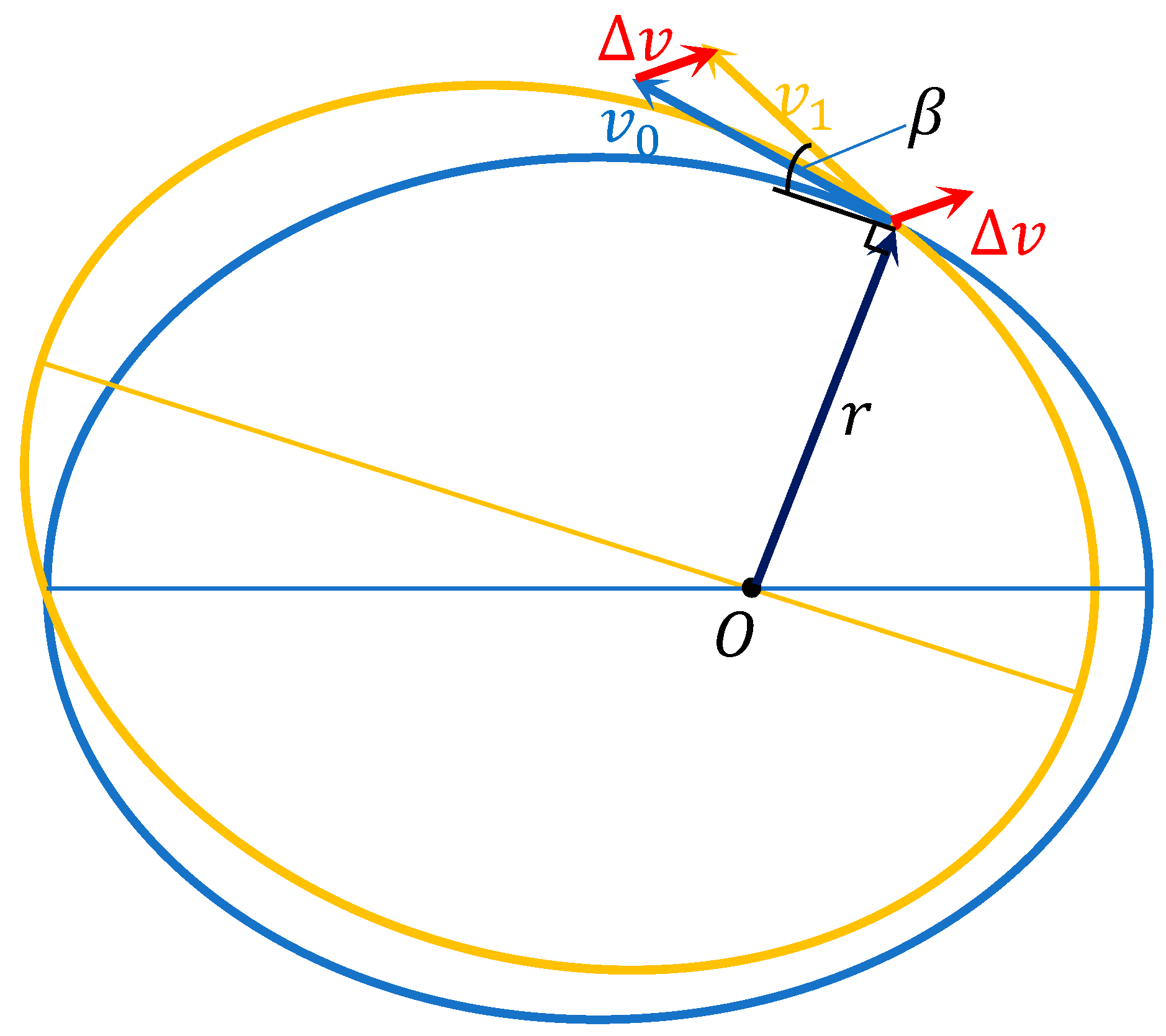
2.1. Analysis of Satellite Orbit Maneuvers
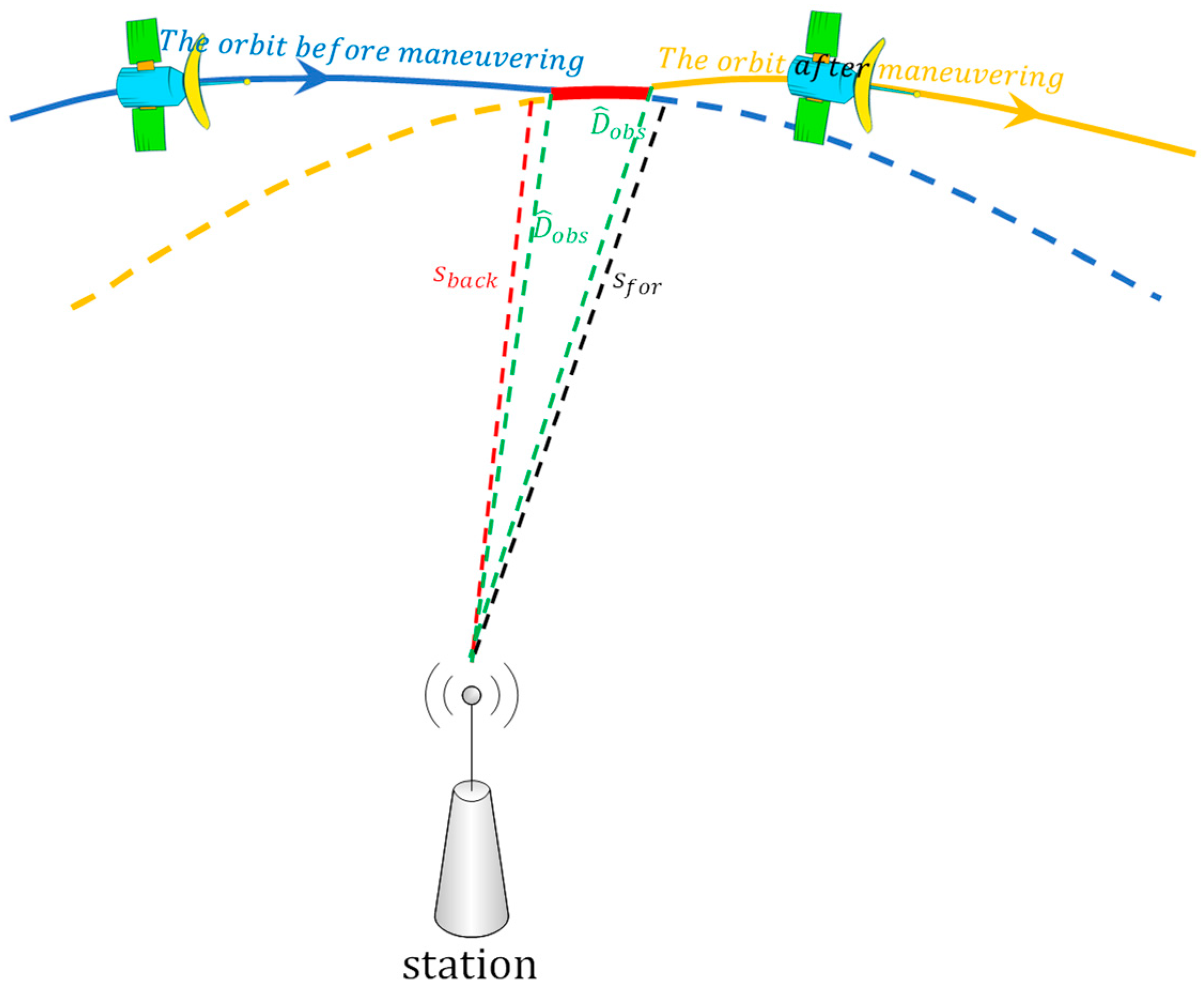
2.2. Detection Factor of Orbital Maneuver Time Period
2.3. Method for Predicting the Orbit
3. Experimental Validation
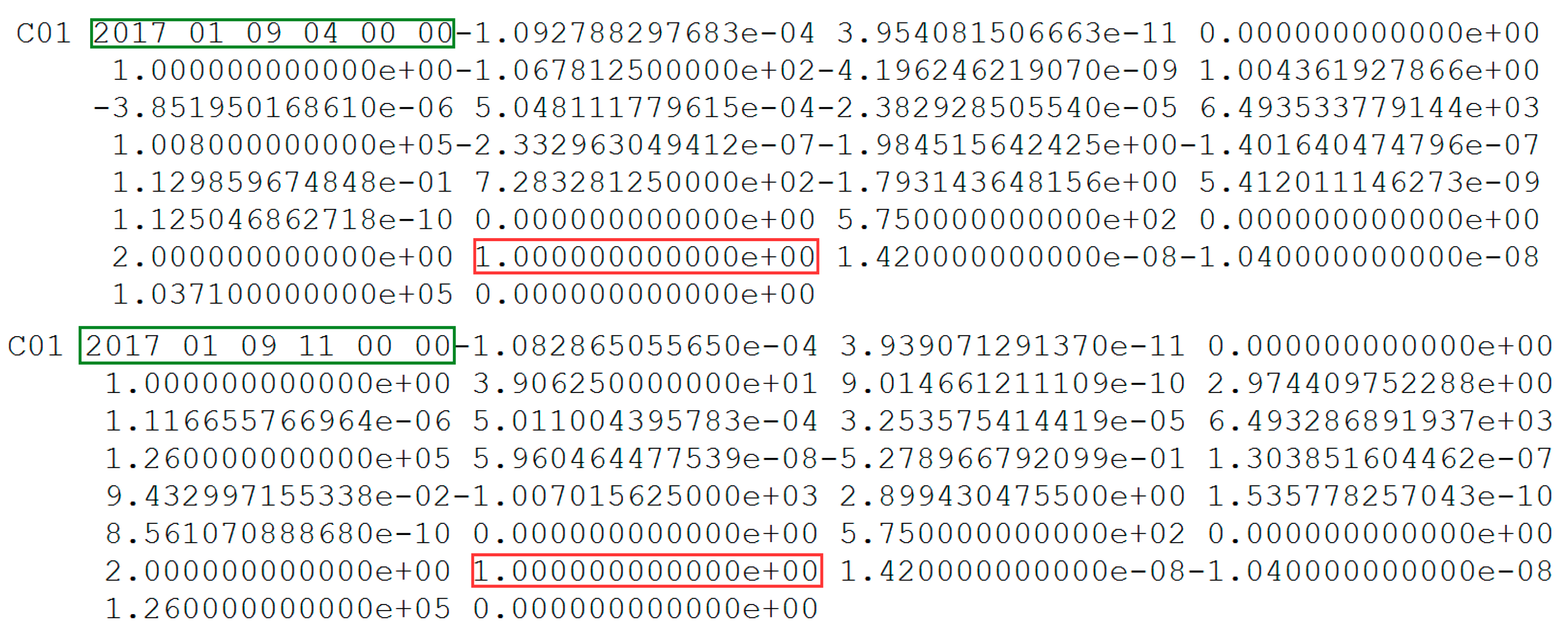
3.1. Data Description
3.2. Orbital Maneuver Period Detection
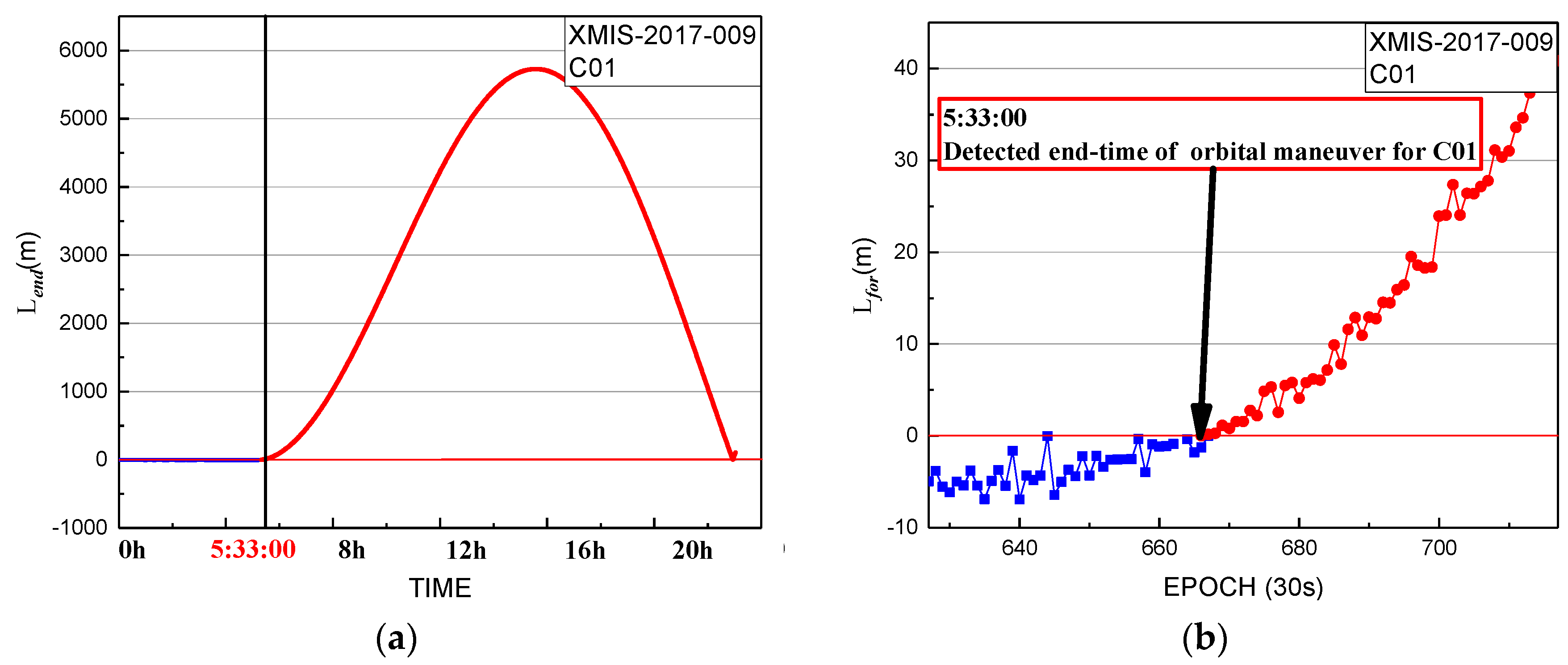
3.2.1. Orbital Maneuver Period Detection for GEO Satellites
3.2.2. Results of Orbital Maneuver Period Detection for IGSO and MEO Satellites
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yang, Y. Progress, Contribution and Challenges of Compass/Beidou Satellite Navigation System. Acta Geod. Cartogr. Sin. 2010, 39, 1–6. [Google Scholar] [CrossRef]
- Huang, G.; Yan, X.; Zhang, Q.; Liu, C.; Wang, L.; Qin, Z. Estimation of antenna phase center offset for BDS IGSO and MEO satellites. GPS Solut. 2018. [Google Scholar] [CrossRef]
- He, L.; Ge, M.; Wang, J.; Wickert, J.; Schuh, H. Experimental Study on the Precise Orbit Determination of the BeiDou Navigation Satellite System. Sensors 2013, 13, 2911–2928. [Google Scholar] [CrossRef] [PubMed]
- Shi, C.; Zhao, Q.; Li, M.; Tang, W.; Hu, Z.; Lou, Y.; Zhang, H.; Niu, X.; Liu, J. Precise orbit determination of BeiDou Satellites with precise positioning. Sci. China Earth Sci. 2012, 55, 1079–1086. [Google Scholar] [CrossRef]
- Huang, G.; Cui, B.; Zhang, Q.; Fu, W.; Li, P. An Improved Predicted Model for BDS Ultra-Rapid Satellite Clock Offsets. Remote Sens. 2018, 10, 60. [Google Scholar] [CrossRef]
- Huang, G.; Cui, B.; Zhang, Q.; Li, P.; Xie, W. Switching and Performance Variations of On-Orbit BDS Satellite Clocks. Adv. Space Res. 2018. [Google Scholar] [CrossRef]
- Qiao, J.; Chen, W. Beidou satellite maneuver thrust force estimation for precise orbit determination. GPS Solut. 2018. [Google Scholar] [CrossRef]
- Ge, H.; Li, B.; Ge, M.; Shen, Y.; Schuh, H. Improving BeiDou precise orbit determination using observations of onboard MEO satellite receivers. J. Geod. 2017. [Google Scholar] [CrossRef]
- Wang, B.; Lou, Y.; Liu, J.; Zhao, Q.; Su, X. Analysis of BDS satellite clocks in orbit. GPS Solut. 2016, 20, 783–794. [Google Scholar] [CrossRef]
- Shi, C.; Zhao, Q.; Hu, Z.; Liu, J. Precise relative positioning using real tracking and IGSO satellites. GPS Solut. 2013, 17, 103–119. [Google Scholar] [CrossRef]
- Yan, X.; Huang, G.; Zhang, R.; Zhang, Q. A Method Based on Broadcast Ephemeris to Detect BDS Satellite Orbital Maneuver. J. Navig. Position 2015, 3, 35–38. [Google Scholar]
- Ye, F.; Yuan, Y.; Tan, B.; Jikun, O. A Robust Method to Detect BeiDou Navigation Satellite System Orbit Maneuvering/Anomalies and Its Applications to Precise Orbit Determination. Sensors 2017, 17, 1129. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Liu, W.; Tang, G.; Song, B.; Ge, M. Different Thrust Maneuvers Detection of Uncooperative Space Objects. J. Astronaut. 2016, 37, 253–261. [Google Scholar] [CrossRef]
- Su, J.; Dong, Y. Detection of space target orbit maneuver on board by wavelet analysis. Chin. J. Space Sci. 2012, 32, 412–416. [Google Scholar]
- Du, L.; Zhang, Z.; Li, X.; Wang, R.; Liu, L.; Guo, R. Station-keeping Maneuver Monitoring and Moving-window Ground Track Fitting of GEO Satellites. Acta Geod. Cartogr. Sin. 2014, 43, 233–239. [Google Scholar] [CrossRef]
- Sciré, G.; Santoni, F.; Piergentili, F. Analysis of Orbit Determination for Space Based Optical Space Surveillance System. Adv. Space Res. 2015, 56, 421–428. [Google Scholar] [CrossRef]
- Huang, G.; Qin, Z.; Zhang, Q.; Wang, L.; Yan, X.; Wang, X. A Real-Time Robust Method to Detect BeiDou GEO/IGSO Orbital Maneuvers. Sensors 2017, 17, 2761. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Qin, Z.; Zhang, Q.; Wang, L.; Yan, X.; Fan, L.; Wang, X. An Optimized Method to Detect BDS Satellites’ Orbit Maneuvering and Anomalies in Real-Time. Sensors 2018, 18, 726. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R. Satellite Orbit Attitude Dynamics and Control; Beihang University Press: Beijing, China, 1998. [Google Scholar]
- Montenbruck, O.; Gill, E. Satellite Orbits: Models, Methods and Applications; Springer: Berlin, Germany, 2000. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PRN | C01 | C02 | C03 | C04 | C05 | C06 | C07 | C08 | C09 | C10 | C11 | C12 | C13 | C14 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 10.7 | 2.9 | 5.2 | 4.8 | 5.2 | 4.8 | 7.8 | 6.4 | 3.6 | 2.9 | 8.8 | 5.9 | 19.2 | 3.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Z.; Huang, G.; Zhang, Q.; Wang, L.; Yan, X.; Kang, Y.; Wang, X.; Xie, S. A Method to Determine BeiDou GEO/IGSO Orbital Maneuver Time Periods. Sensors 2019, 19, 2675. https://doi.org/10.3390/s19122675
Qin Z, Huang G, Zhang Q, Wang L, Yan X, Kang Y, Wang X, Xie S. A Method to Determine BeiDou GEO/IGSO Orbital Maneuver Time Periods. Sensors. 2019; 19(12):2675. https://doi.org/10.3390/s19122675
Chicago/Turabian StyleQin, Zhiwei, Guanwen Huang, Qin Zhang, Le Wang, Xingyuan Yan, Yanchao Kang, Xiaolei Wang, and Shichao Xie. 2019. "A Method to Determine BeiDou GEO/IGSO Orbital Maneuver Time Periods" Sensors 19, no. 12: 2675. https://doi.org/10.3390/s19122675
APA StyleQin, Z., Huang, G., Zhang, Q., Wang, L., Yan, X., Kang, Y., Wang, X., & Xie, S. (2019). A Method to Determine BeiDou GEO/IGSO Orbital Maneuver Time Periods. Sensors, 19(12), 2675. https://doi.org/10.3390/s19122675