Design of UAV Downwash Airflow Field Detection System Based on Strain Effect Principle




Abstract
1. Introduction
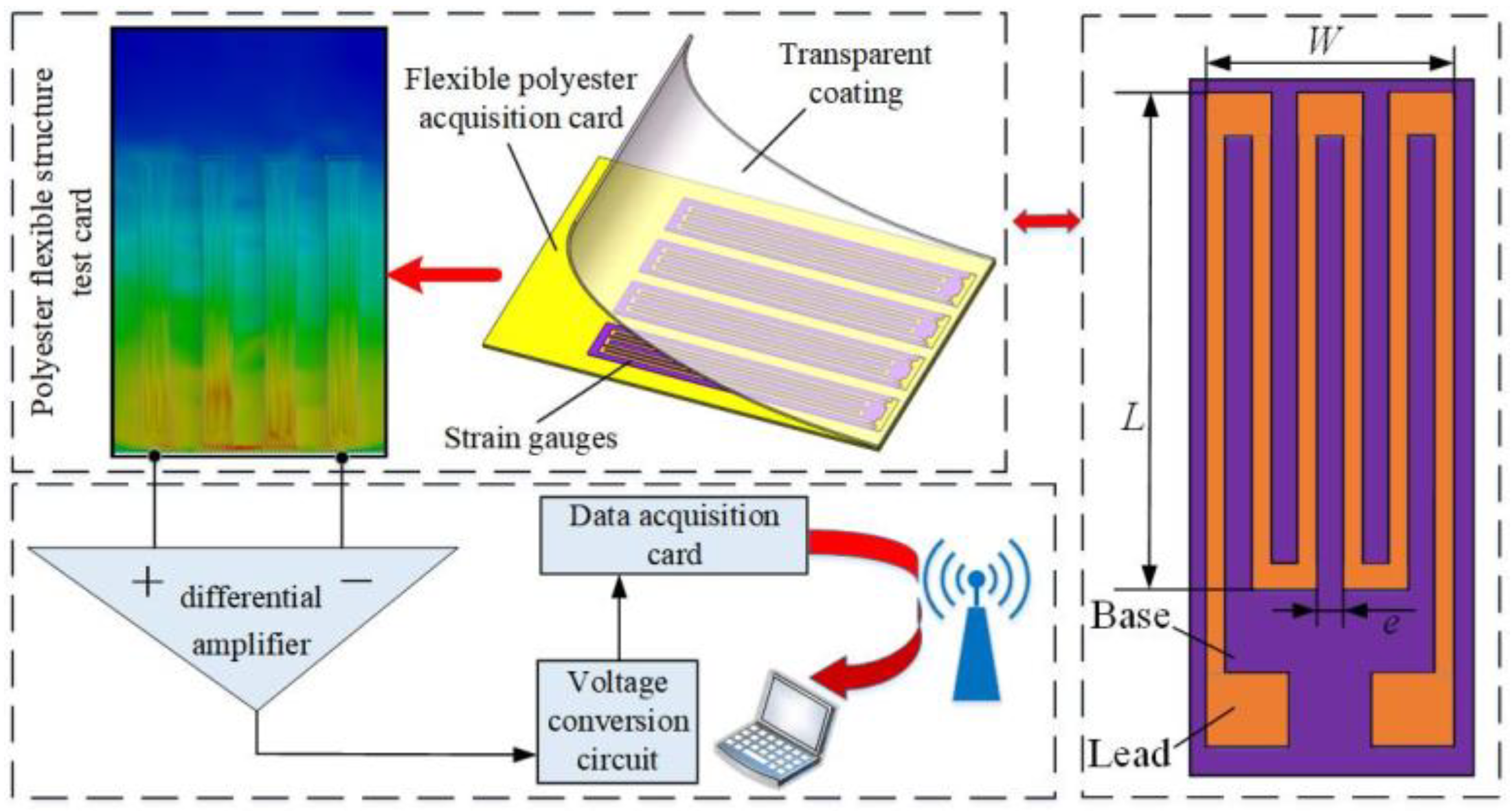
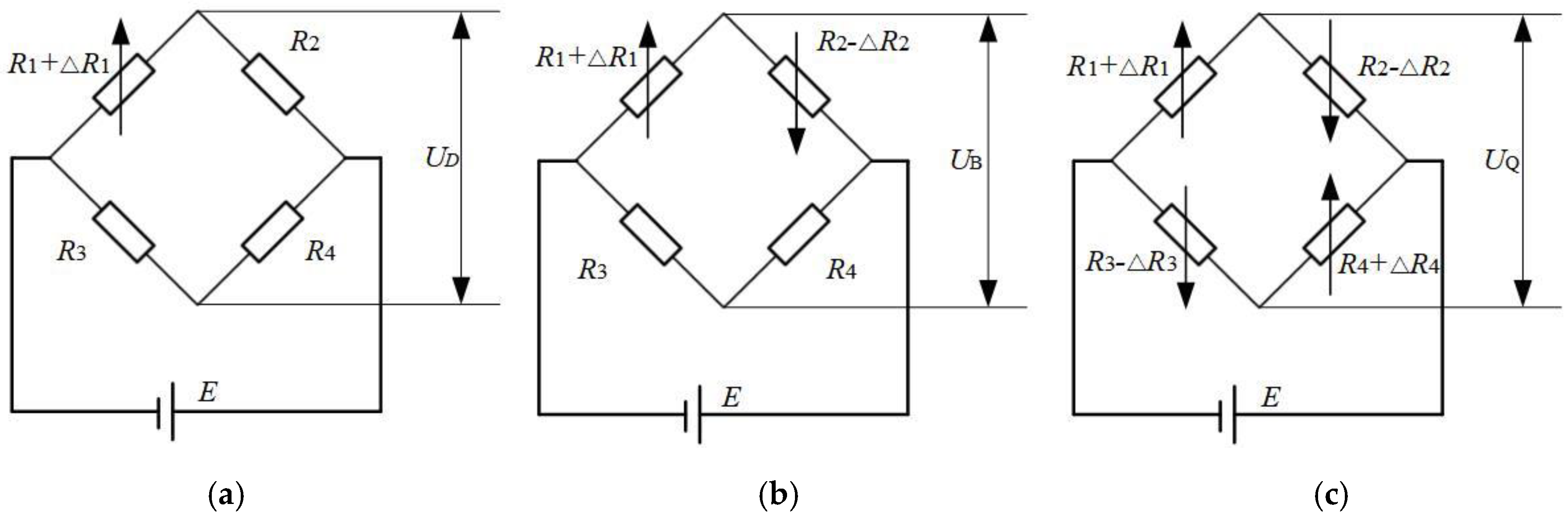
2. Measurement Principle of Acquisition System
3. Strain Simulation Analysis and Parameter Determination of Acquisition System
3.1. Finite Element Modeling and One-Way Fluid-Solid Coupling Analysis
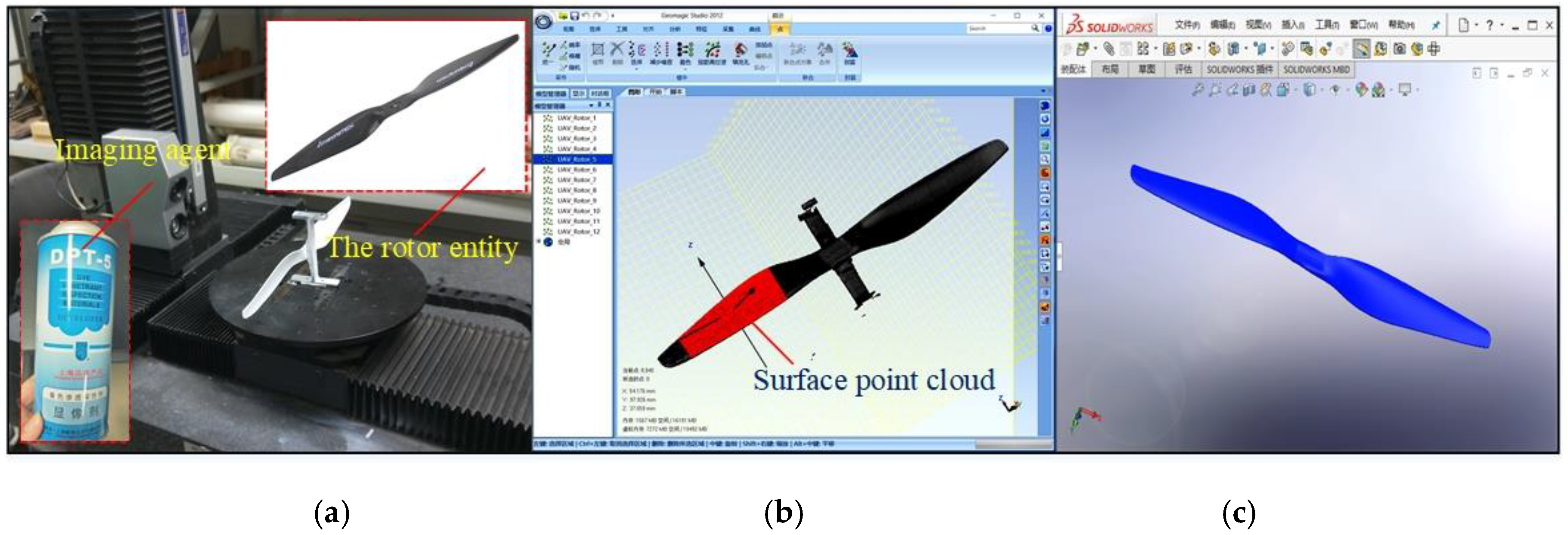
3.1.1. Establishment of Rotor Finite Element Model
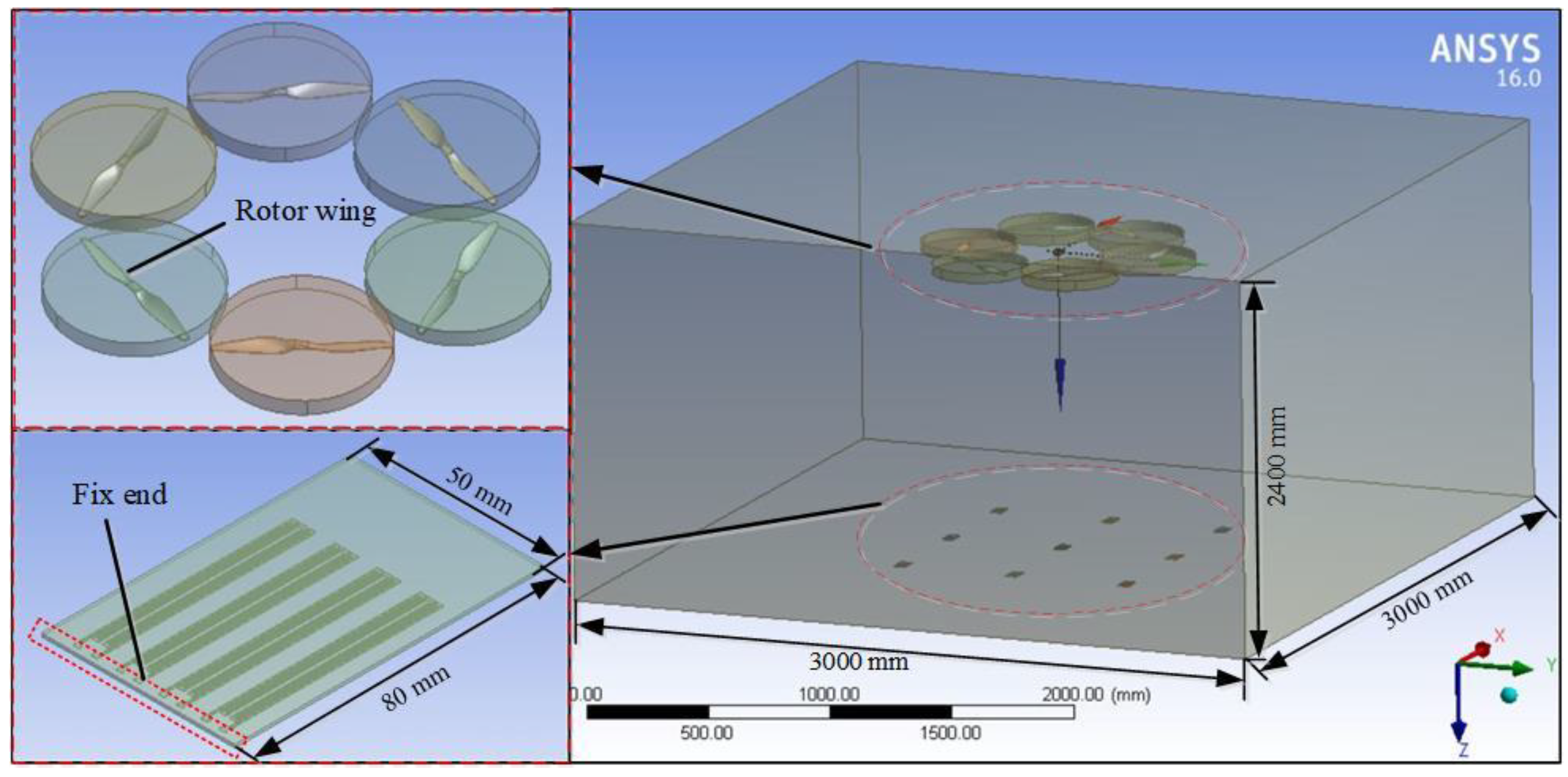
3.1.2. Regional Boundary Setting and One-Way Fluid-Solid Coupling Analysis
3.2. Acquisition System Simulation Analysis and Parameter Determination
3.2.1. Simulation of the Downwash Airflow Field under the Rotor
3.2.2. Flexible Detection Structure Acquisition Card Simulation Analysis and Parameter Determination
4. Experiment Preparation and Test Design
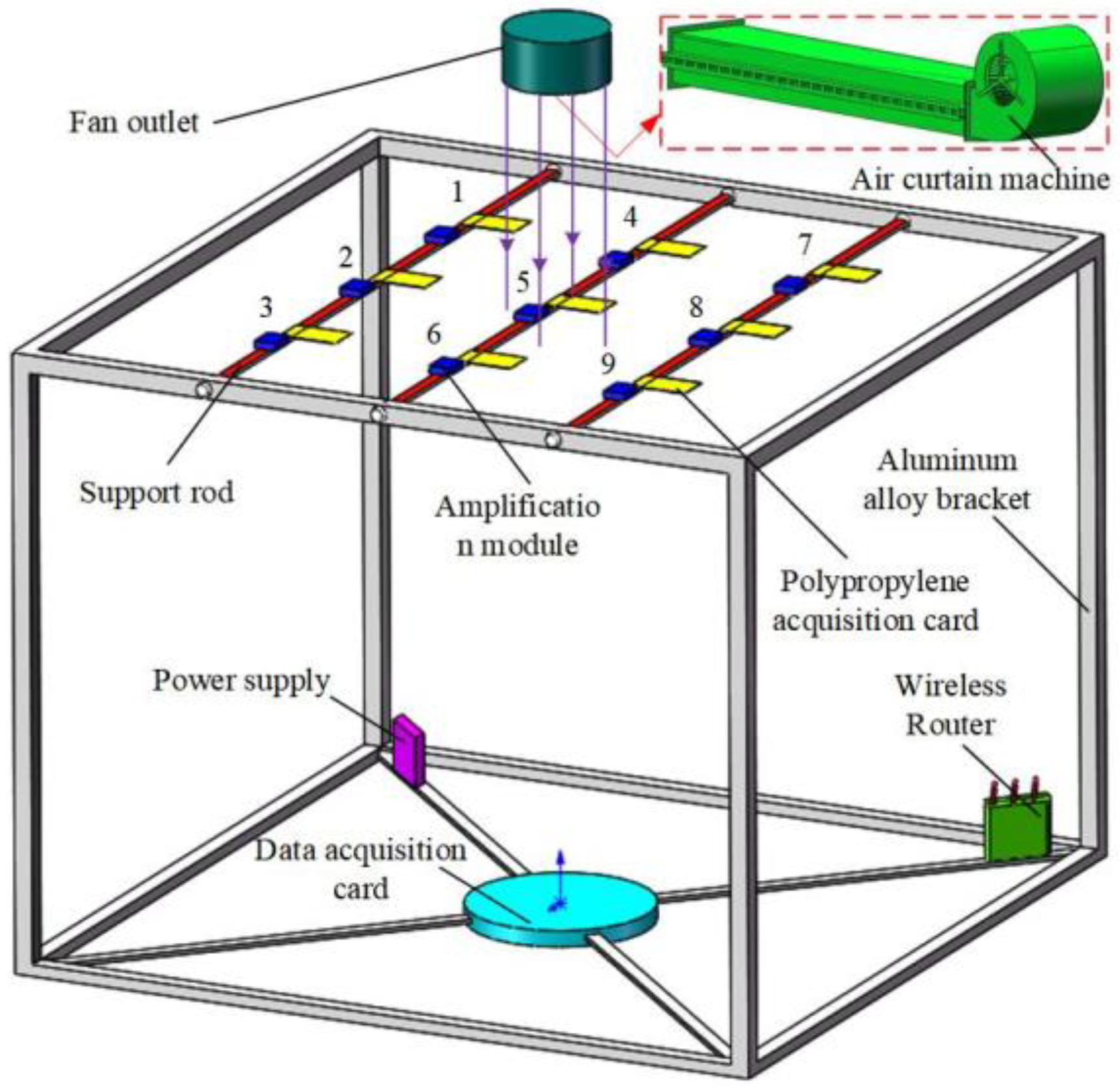
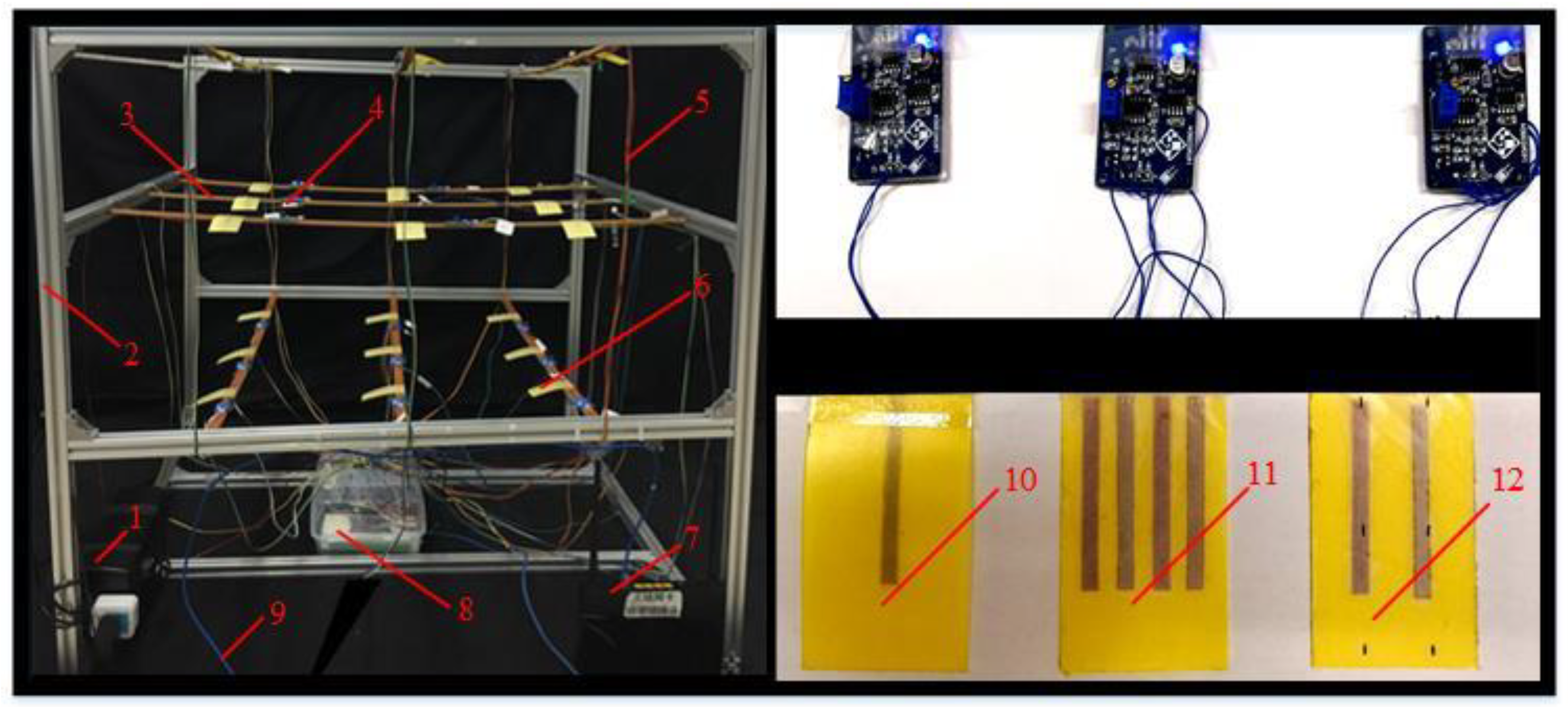
4.1. Material and Layout
4.2. Experiment Design
4.3. Influence Test and Analysis of Difference in Flexible Structure Acquisition System
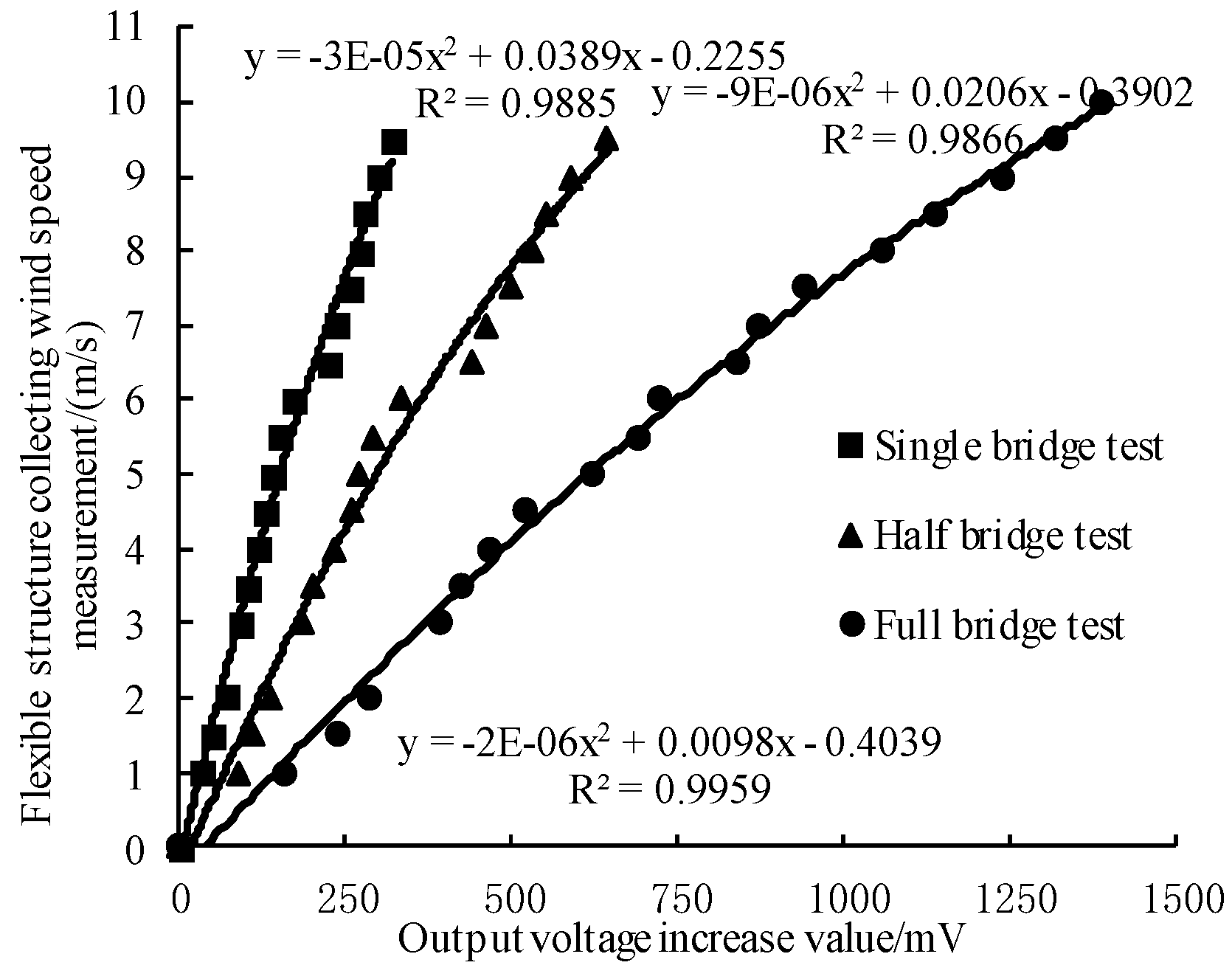
4.4. Calibration Test and Result Analysis of the Flexible Structure Acquisition System
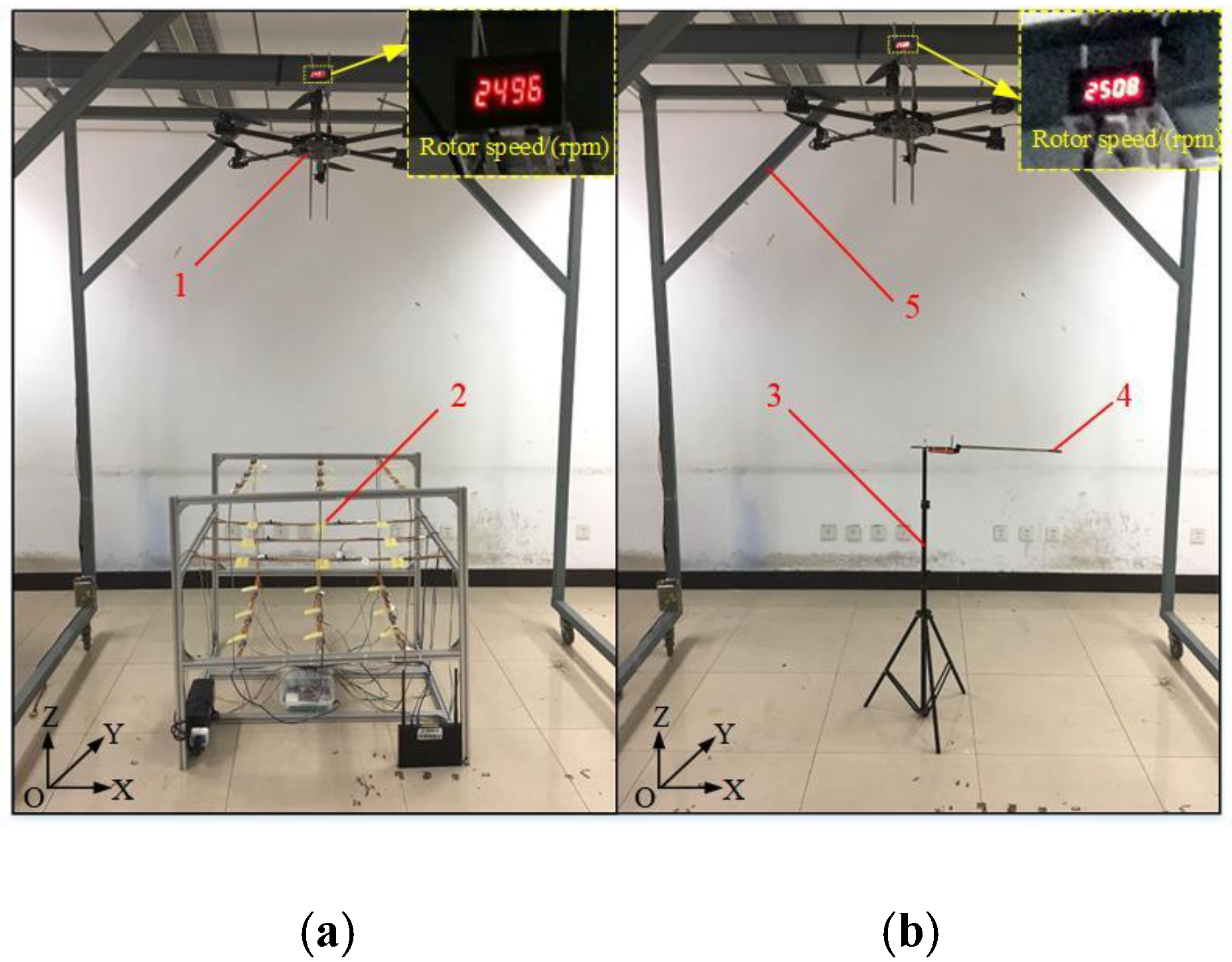
4.5. Application Test
5. Results and Discussion
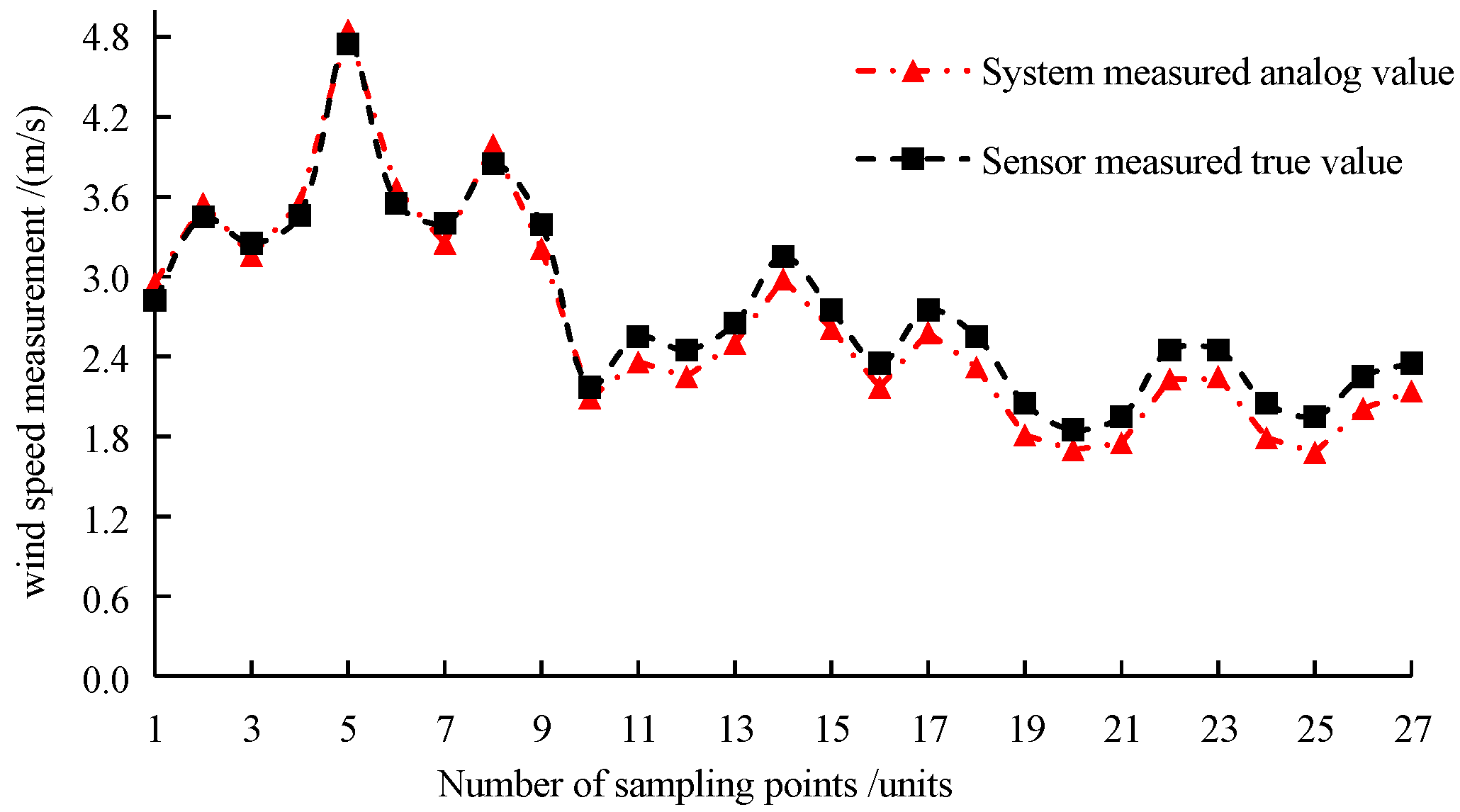
5.1. Testing Results of the Flexible Structure Acquisition System
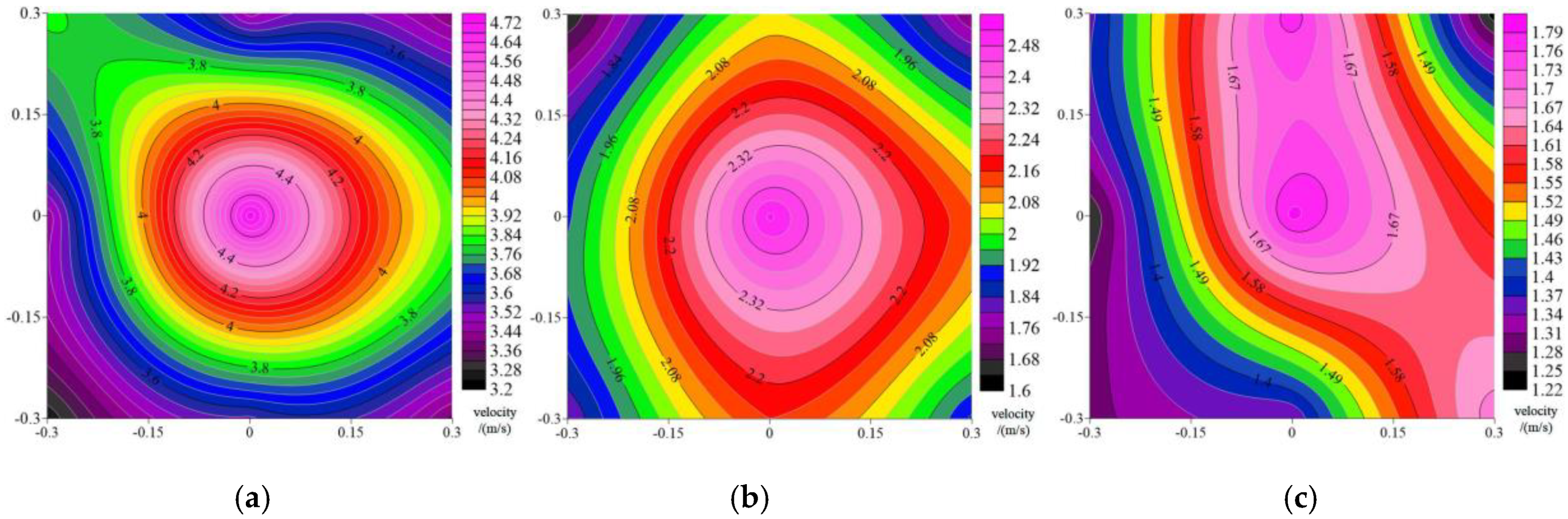
5.2. Analysis of the Wind Field in 3D Shape of the Flexible Structure Acquisition System
5.3. Analysis and Discussion on 3D Shape of Wind Field
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- He, X.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- Qin, W.; Qiu, B.; Xue, X.; Chen, C.; Xu, Z.; Zhou, Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Zhang, B.; Tang, Q.; Chen, L.P.; Xu, M. Numerical simulation of wake vortices of crop spraying aircraft close to the ground. Biosyst. Eng. 2016, 145, 52–64. [Google Scholar] [CrossRef]
- Wang, L.; Lan, Y.; Hoffmann, W.C.; Fritz, B.K.; Chen, D.; Wang, S. Design of variable spraying system and Influencing factors on droplets deposition of small UAV. Trans. CSAM 2016, 47, 15–22. [Google Scholar]
- Li, J.; Lan, Y.; Wang, J.; Chen, S.; Huang, C.; Liu, Q.; Liang, Q. Distribution law of rice pollen in the wind field of small UAV. Int. J. Agric. Biol. Eng. 2017, 10, 32–40. [Google Scholar]
- Yang, Z.; Ge, L.; Qi, L.; Cheng, Y.; Wu, Y. Influence of UAV rotor downwash airflow on spray width. Trans. CSAM 2018, 49, 116–122. [Google Scholar]
- Tang, Q.; Zhang, R.; Chen, L.; Xu, M.; Yi, T.; Zhang, B. Droplets movement and deposition of an eight-rotor agricultural UAV in downwash flow field. Int. J. Agric. Biol. Eng. 2017, 10, 47–56. [Google Scholar]
- Musiu, E.M.; Qi, L.; Wu, Y. Spray deposition and distribution on the targets and losses to the ground as affected by application volume rate, airflow rate and target position. Crop Prot. 2019, 116, 170–180. [Google Scholar] [CrossRef]
- Xue, X.; Lan, Y.; Sun, Z.; Chang, C.; Hoffmann, W.C. Develop an unmanned aerial vehicle based automatic aerial spraying system. Comput. Electron. Agric. 2016, 128, 58–66. [Google Scholar] [CrossRef]
- Lan, Y.; Chen, S.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Jian, L.; Xin, X.; Li, Z.; Xian, X.; Zhu, S.; Song, Z.; Ping, W.; Yan, G.; Tao, Z.; Su, D.; et al. Mobile Drone Agricultural Spraying Operation Wind Field Testing Equipment and Testing Method. China Patent CN101718615 A[P], 2 June 2010. [Google Scholar]
- Zhou, H. Wind Speed Sensor Based on principle of pitot tube. Saf. Coal Mines 2018, 49, 99–105. [Google Scholar]
- Chen, Z.; Guo, W.; Xuan, C.; Zhang, Y.; Wu, P. Wireless Hot-film Wind Speed Profiler. Trans. CSAM 2012, 43, 99–110. [Google Scholar]
- Liu, H.; Chang, J.; Hou, Z.; Chen, Z.; Xuan, C.; Shang, X. Investigation on near-surface wireless wind speed profiler based on thermistors. Trans. CSAM 2017, 48, 68–76. [Google Scholar]
- Xing, H.; Wei, J.; Xu, W.; Yu, X.; Zhou, H. Improved design of ultrasonic transducer array for wind measurement. Chin. J. Sci. Instrum. 2017, 38, 1988–1995. [Google Scholar]
- Wang, C.; He, X.; Wang, X.; Wang, Z.; Wang, S.; Li, L. Distribution characteristics of pesticide application droplets deposition of unmanned aerial vehicle based on testing method of spatial quality balance. Trans. CSAE 2016, 32, 89–97. [Google Scholar]
- Huang, C.; Li, J.; Lan, Y.; Ye, W.; Li, S.; Xing, H. Design and experiment of a wind speed detection equipment with wind pressure conversion near ground. J. South China Agric. Univ. 2018, 39, 105–111. [Google Scholar]
- Zhang, J.; Sun, L.; Lin, M.; Mao, X.; Ge, Y. The shadow effect compensation for ultrasonic anemometer based on CFD and BP Neural Network. Chin. J. Sens. Actuators 2018, 31, 1201–1210. [Google Scholar]
- Mullins, M.A.; van Putten, A.F.P.; Bayford, R.; Butcher, J.B. Potential for a smart sensor based on an integrated silicon anemometer. Sens. Actuators A Phys. 1995, 47, 342–348. [Google Scholar] [CrossRef]
- Hu, L.; Zhou, Z.; Luo, X.; Wang, P.; Yan, Y.; Li, J. Development and experiment of a wireless wind speed sensor network measurement system for unmanned helicopter. Trans. CSAM 2014, 45, 221–226. [Google Scholar]
- Wang, P.; Hu, L.; Zhou, Z.; Yang, W.; Liu, A.; Luo, X.; Xue, X.; He, J.; Yan, Y. Wind field measurement for supplementary pollination in hybrid rice breeding using unmanned gasoline engine single-rotor helicopter. Trans. CSAE 2013, 29, 54–62. [Google Scholar]
- Li, J.; Zhou, Z.; Lan, Y.; Hu, L.; Zang, Y.; Liu, A.; Luo, X.; Zhang, T. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation. Trans. CSAE 2015, 31, 77–86. [Google Scholar]
- Wang, P.; Yu, W.; Ou, M.; Gong, C.; Jia, W. Monitoring of the pesticide droplet deposition with a novel capacitance sensor. Sensors 2019, 19, 537. [Google Scholar] [CrossRef] [PubMed]
- Bartzanas, T.; Kacira, M.; Zhu, H.; Karmakar, S.; Tamimi, E.; Katsoulas, N.; Lee, I.B.; Kittas, C. Computational fluid dynamics applications to improve crop production systems. Comput. Electron. Agric. 2013, 93, 151–167. [Google Scholar] [CrossRef]
- Biswal, S.; Ramaswamy, A. Measurement of existing prestressing force in concrete structures through an embedded vibrating beam strain gauge. Meas. J. Int. Meas. Confed. 2016, 83, 10–19. [Google Scholar] [CrossRef]
- Endalew, A.M.; Hertog, M.; Gebrehiwot, M.G.; Baelmans, M.; Ramon, H.; Nicolaï, B.M.; Verboven, P. Modelling airflow within model plant canopies using an integrated approach. Comput. Electron. Agric. 2009, 66, 9–24. [Google Scholar] [CrossRef]
- Zhang, H.; Qi, L.; Wu, Y.; Liu, W.; Cheng, Z.; Musiu, E.M. Spatio-temporal distribution of down-wash airflow for multi-rotor plant protection UAV based on porous model. Trans. CSAM 2019, 50, 112–122. [Google Scholar]
- Yang, F.; Xue, X.; Zhang, L.; Sun, Z. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover. Int. J. Agric. Biol. Eng. 2017, 10, 41–53. [Google Scholar]
- Hu, Y.; Lin, Q.; Dang, X.; Xie, G. Measuring performance analysis on metal strain plate resisitive senor. J. Mudanjiang Norm. Univ. 2018, 4, 35–38. [Google Scholar]
- Xiao, L.; Guo, L.; Zhang, L. Design of flexible sensor array based on strain gauge piezoresistive effect. Instrum. Tech. Sens. 2017, 7, 4–19. [Google Scholar]
- Xu, Y.; Yang, X.; Wei, T.; Yao, J. Optimization of strain gauge structure parameters based on orthogonal test. China Meas. Test 2018, 44, 129–133. [Google Scholar]
- Sugiura, R.; Noguchi, N.; Ishii, K. Remote-sensing technology for vegetation monitoring using an unmanned helicopter. Biosyst. Eng. 2005, 90, 369–379. [Google Scholar] [CrossRef]
- Wu, Y.; Qi, L.; Zhang, Y.; Gao, C.; Li, S.; Musiu, E.M. Design and experiment of pesticide droplet deposition detection system based on principle of standing wave ratio. Trans. CSAE 2017, 33, 64–71. [Google Scholar]
- Zhang, H.; Lan, Y.; Suh, C.P.C.; Westbrook, J.; Clint Hoffmann, W.; Yang, C.; Huang, Y. Fusion of remotely sensed data from airborne and ground-based sensors to enhance detection of cotton plants. Comput. Electron. Agric. 2013, 93, 55–59. [Google Scholar] [CrossRef]
- Li, Y.; Yuan, J.; Liu, X.; Niu, Z.; Chen, B.; Liu, X. Spraying strategy optimization with genetic algorithm for autonomous air-assisted sprayer in Chinese heliogreenhouses. Comput. Electron. Agric. 2019, 156, 84–95. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition System Number | Single Bridge Voltage Output Value/(mv) | Acquisition System Number | Half Bridge Voltage Output Value/(mv) | Acquisition System Number | Full Bridge Voltage Output Value/(mv) |
|---|---|---|---|---|---|
| D1 | 120 | B1 | 234 | Q1 | 469 |
| D2 | 126 | B2 | 240 | Q2 | 475 |
| D3 | 119 | B3 | 235 | Q3 | 480 |
| D4 | 112 | B4 | 246 | Q4 | 468 |
| D5 | 116 | B5 | 241 | Q5 | 489 |
| D6 | 118 | B6 | 239 | Q6 | 475 |
| D7 | 123 | B7 | 236 | Q7 | 471 |
| D8 | 125 | B8 | 243 | Q8 | 469 |
| D9 | 120 | B9 | 241 | Q9 | 481 |
| Parameter | Data |
|---|---|
| Motor model | X4114KV370 |
| Distance between axes (mm) | 800 |
| Rotor model | 1555 |
| Rotor diameter (mm) | 380 |
| Number of rotors (unit) | 6 |
| Rotor speed (rpm) | 2500 |
| Height | W | C | RMSE | emax |
|---|---|---|---|---|
| 0.4 m | 0.648 | 0.6397 | 0.2238 | 16.07% |
| 0.7 m | 0.831 | 0.8219 | 0.1725 | 9.91% |
| 1.0 m | 0.960 | 0.9367 | 0.1246 | 5.61% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Qi, L.; Zhang, H.; Musiu, E.M.; Yang, Z.; Wang, P. Design of UAV Downwash Airflow Field Detection System Based on Strain Effect Principle. Sensors 2019, 19, 2630. https://doi.org/10.3390/s19112630
Wu Y, Qi L, Zhang H, Musiu EM, Yang Z, Wang P. Design of UAV Downwash Airflow Field Detection System Based on Strain Effect Principle. Sensors. 2019; 19(11):2630. https://doi.org/10.3390/s19112630
Chicago/Turabian StyleWu, Yalei, Lijun Qi, Hao Zhang, Elizabeth M. Musiu, Zepeng Yang, and Pei Wang. 2019. "Design of UAV Downwash Airflow Field Detection System Based on Strain Effect Principle" Sensors 19, no. 11: 2630. https://doi.org/10.3390/s19112630
APA StyleWu, Y., Qi, L., Zhang, H., Musiu, E. M., Yang, Z., & Wang, P. (2019). Design of UAV Downwash Airflow Field Detection System Based on Strain Effect Principle. Sensors, 19(11), 2630. https://doi.org/10.3390/s19112630