4.1. Dataset
Some existing indoor datasets, such as the Matterport3d [
43] and ScanNet [
44], may be used to generate spherical panoramas, but the process is complex and not rigorous. Therefore, they were rarely used in the studies of spherical object detection. Other studies [
25,
26] used semi-synthetic or synthetic datasets, but it is more valuable to use real data for testing.
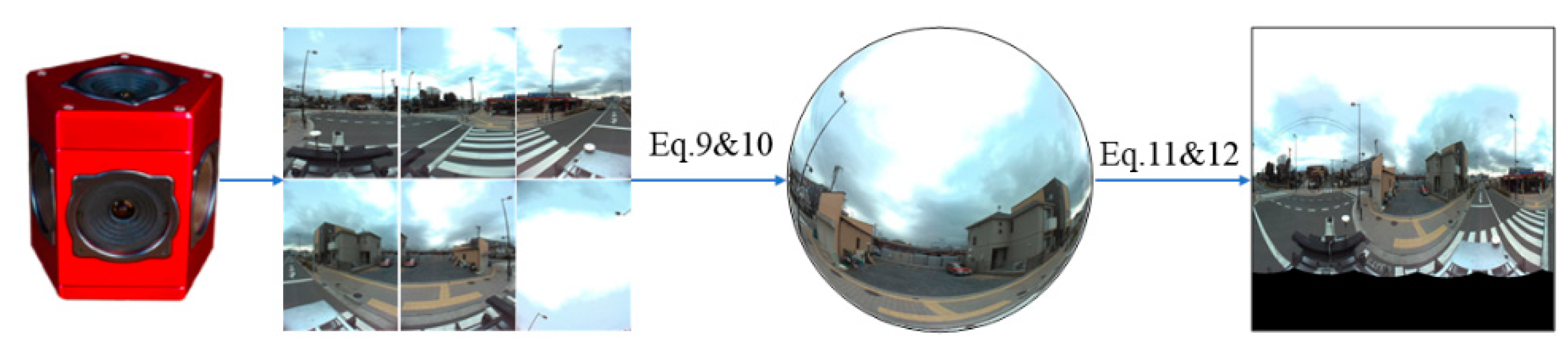
Due to the lack of real omnidirectional image datasets with the annotations of objects’ bounding box, we created a street scene dataset called WHU (Wuhan University) panoramic dataset. The dataset consists of 600 RGB images captured from vehicle-borne PGR’s Ladybug3 camera [
45] in Kashiwa and Dagong cities, Japan. The camera consists of six fisheye lenses, each of which has a maximum 1616 × 1232 pixel resolution. The focal length of the fisheye camera is 3.3 mm and the radius of the panoramic sphere is set to 20 m. After the data preprocessing (
Figure 4), four classes of objects of interest, including light, crosswalk, crosswalk warning line (a diamond sign indicating the upcoming crosswalk), and car were manually labelled in the Driscoll–Healy images (see
Table 1). Cross-checking was carefully carried out to minimize the risk of false judgement. In object detection, one third of the data is used for training and the rest for testing. All experiments are executed on a Linux PC with an Intel i5-8400 CPU, a GeForce GTX 1080 TI 11G GPU, and 8G memory.
4.2. Classification
Classification tasks using a SCNN were only testified in virtual reprojection of 2D planar images [
18]. We checked the SCNN’s capability in real and larger street scene. Five classes of objects, including building, car, crosswalk, crosswalk warning line, and streetlight were selected from 2558 omnidirectional images for testing. For each omnidirectional image, only one interested object with adequate size was reserved and the rest of the pixels were set to zero. We scaled these processed images to 512 × 512 pixels. Both planar and spherical CNNs use light and comparable structures. The planar CNN structure is as follows: Conv-ReLU-Conv-ReLU-FC-Softmax, with 5 × 5 kernel size, 32, 64 channels, and 443 k parameters in total. The spherical CNN structure is as follows: S2-ReLU-SO(3)-ReLU-FC-Softmax, with 256, 24 and 12 bandwidth, 32, 64 channels and 149 k parameters. We trained both networks for 100 epochs using an ADAM optimizer with a learning rate of 10
−4 and a batch size of 32.
In the first experiment, two third of the 2558 samples were randomly selected for training and the rest for testing. In the second experiment, those objects located on the left sphere (1427 samples) were selected for training and the objects on the right sphere (1131 samples) were used for testing.
Table 2 shows that, when using the spherical CNN, the classification accuracy is improved by 4.8% in the first experiment and dramatically improved about 70% in the second experiment, compared to the planar CNN, respectively. This proved the effectiveness and advantage of a spherical CNN for classifying spherical images.
4.3. Object Detection
The experiments were designed to evaluate object detection performance in our spherical street-view dataset. Six methods, the Faster R-CNN [
5], Faster R-CNN with FPN (short as FPN) [
46], SCNN [
18], SSD [
47], our G-SCNN, and a variant of the Faster R-CNN (named as Faster R-CNN+) were used for comparison. All of them share the same planar RPN strategy and 600 × 600 image inputs. In all tests, the batch size was set to 1. The size of S2 filters was set to 24 points, which is comparable to a planar convolution with a kernel size of 5 (i.e., 25 points). In the SO(3) convolution, a third dimension was introduced, wherein we increased the number of filter points to 72. Each network was separately trained for 70,000 iterations, with the SGD optimizer starting with an initial learning rate of 10
−3, which was decreased by a factor of 10 after 50,000 iterations.
The SCNN we used is similar to the structure used for classification [
18]. After ROIs are detected by using the RPN, each ROI image patch in the input image is projected onto a blank 600 × 600 grid map (i.e., bandwidth = 300), which is then fed into the SCNN structure, as follows: S2-ReLU-SO(3)-ReLU-SO(3)-ReLU-FC×3-softmax. The input and output bandwidths are 300 and 18 in S2 convolution, 18 and 12 in the first SO(3) convolution, and 12 and 8 in the second SO(3) convolution. The number of output channels of the three convolutions is 24, 48, and 96, respectively.
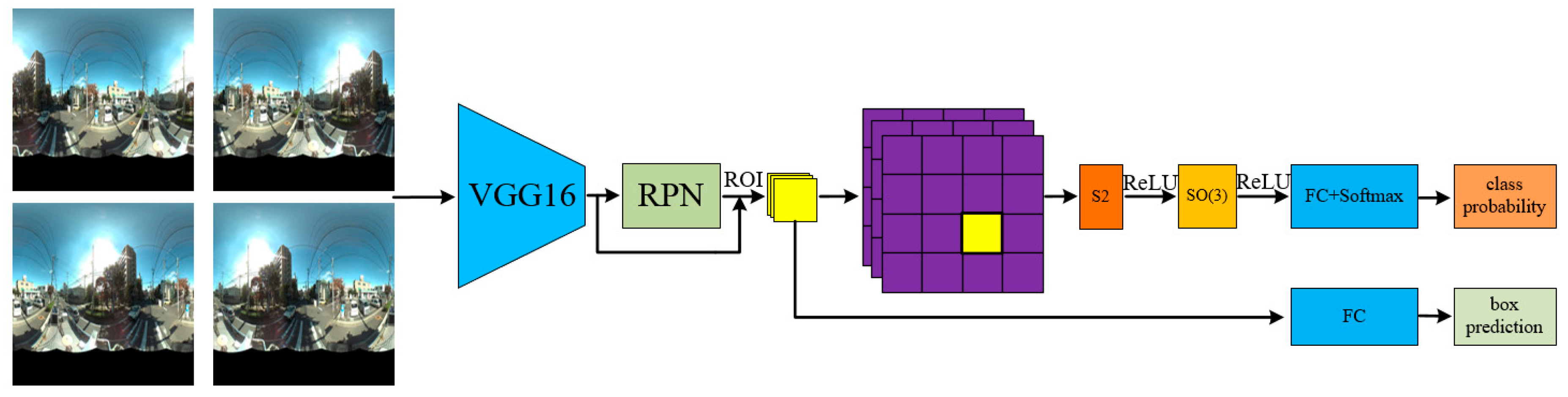
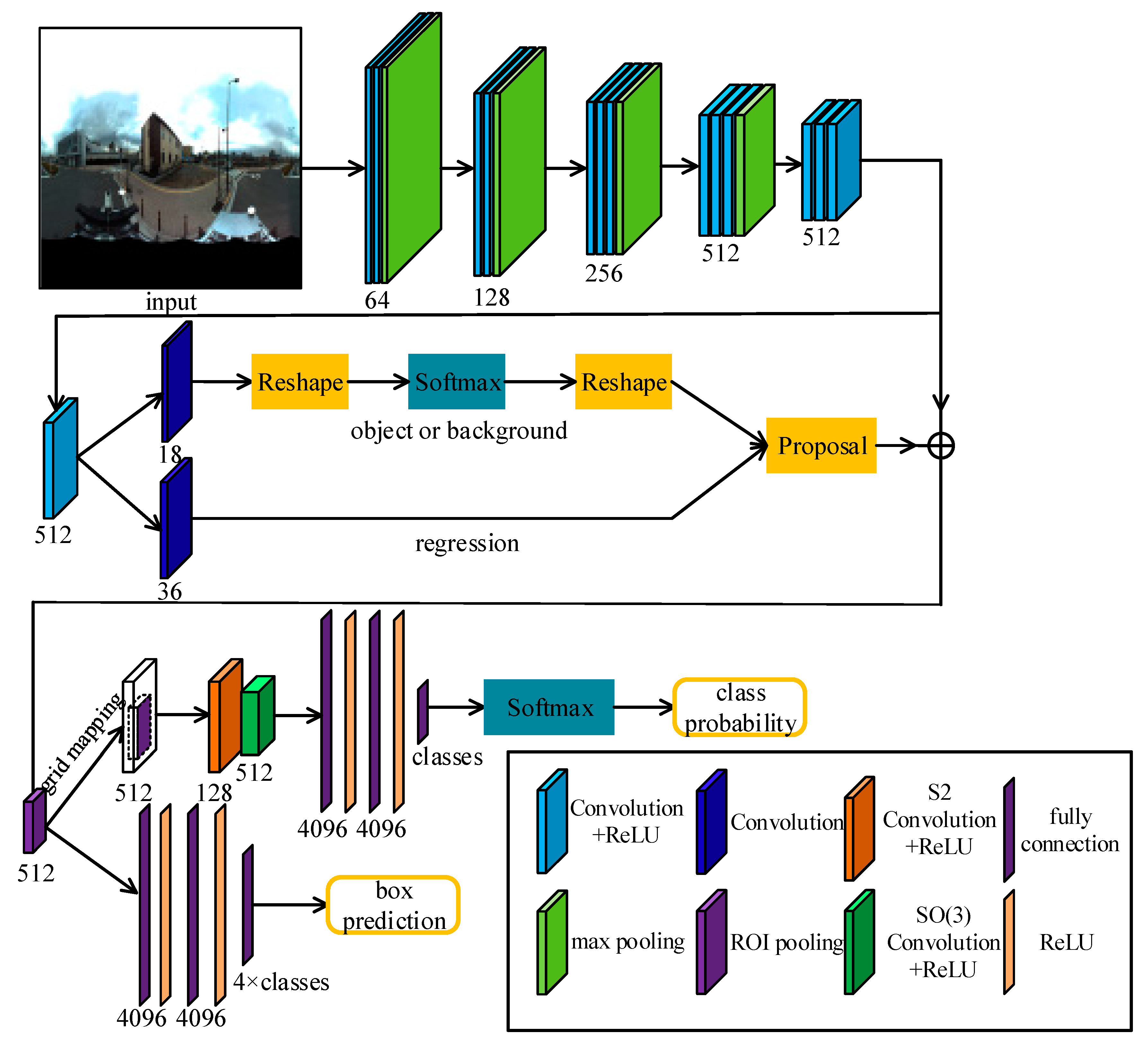
In our G-SCNN, the ROI is retrieved from the 16× down-sampled features (Conv5-3) of the VGG-16 and resampled to 7 × 7 after ROIPooling. It is then projected onto a 28 × 28 grid map (bandwidth = 14) by keeping the same location and resolution. The grid map is then fed into our spherical CNN: S2-ReLU-SO(3)-ReLU-FC×3-softmax, where the input and output bandwidths are 14 and 8 in the S2 convolution and 8 and 6 in the SO(3) convolution respectively. The numbers of input and output channels of the S2 convolution are 512 and 128, respectively. The number of output channels of the SO(3) convolution is 512.
We use the Faster R-CNN+ for ablation experiments, which has the same configuration with our G-SCNN, except the spherical convolutions are replaced with planar convolutions. We keep the output size of the planar convolutions as 28 × 28 and use a kernel size of 5 × 5 to coincide with the S2 and SO(3) convolutions.
For the SSD, the input images were scaled to 512 × 512 pixels, due to the structure of the SSD.
Table 3 shows the object detection results using the Faster R-CNN, FPN, Faster R-CNN+, SCNN, SSD, and our G-SCNN methods, respectively. The AP (average precision) is counted on IoU > 0.5. The SCNN performs the worst and 25% lower than the other methods on mAP (mean average precision), demonstrating the incompetence of applying an original SCNN for object detection. The Faster R-CNN has reached 57.9% mAP. The mAP of the Faster R-CNN+ is 2.5% lower than ours, which demonstrates that the higher performance of our G-SCNN is completely due to the introduction of the specific spherical convolutions. The mAP of the SSD is 3.3% lower than ours and the mAP of FPN is close to ours.
Table 4 shows the object detection results on AP
75 (IoU > 0.75). The mAP of all the methods dropped and our method outperformed the second-best Faster R-CNN 2.8%. The mAP of the SSD and the FPN dropped more. Compared to the results of
Table 3, it indicates that the bounding box accuracy of our method is also better than that of the other methods.
Table 5 shows the object detection results with data augmentation. Each training image was resampled to 8 images at each 45° horizontal interval. We performed offline augmentation on these images and fed them into the network for training. The Faster R-CNN, Faster R-CNN+, FPN, and our method got 5.7%, 3.6%, 4.2%, and 4.1% improvements on mAP
50, and 5.0%, 2.2%, 2.8%, and 5.3% improvements on mAP
75, respectively. The rotation sampling increases the planar CNN’s capacity for detecting rotated objects, however, our method still performs the best on both mAP
50 and mAP
75. The performance of the SCNN got no improvement because its key restriction is lacking enough bandwidth for objects of interest. The performance of the SSD also showed almost no improvement as it is the only method that does not use an RPN for searching bounding boxes.
Table 6 shows the results of applying the rotation augmented models on the rotated test data. One test image was resampled 8 times and the test data now go 8× larger. The mAP of all the methods dropped a little. On mAP
50 the Faster R-CNN dropped 4%, the FPN dropped 3%, and our method dropped 2%. Our method outperformed the second best methods 1.4% and 2.5% on mAP
50 and mAP
75 respectively, and showed better rotation invariance. The SCNN performed the worst.
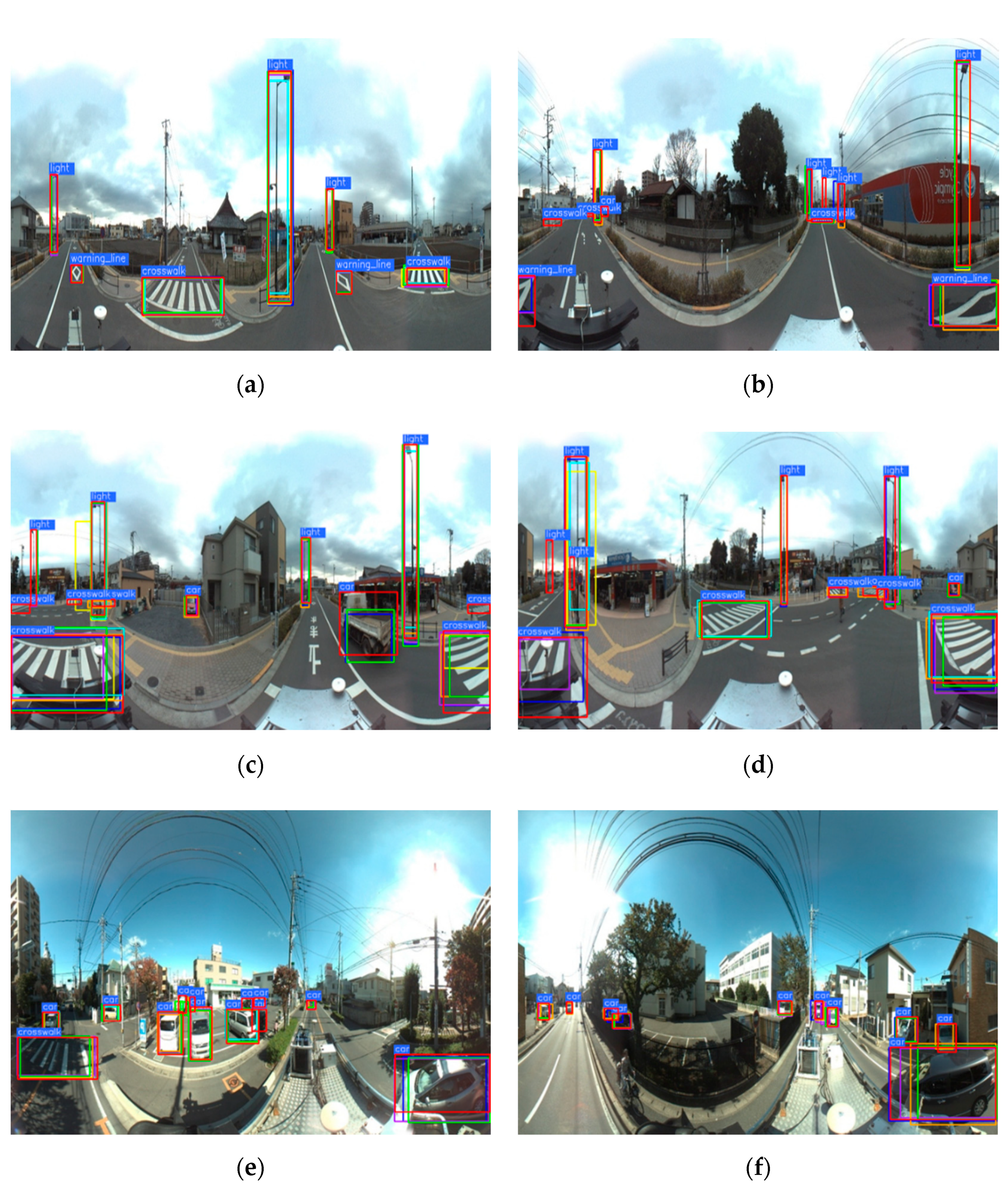
Figure 5 shows some examples of detected objects in the spherical images. Our G-SCNN (blue box) detected most of the objects of interest (the ground truth is denoted with red box). The bounding boxes of our method are closer to the ground truth than that of the other methods, for example, the crosswalk warning line in
Figure 5b, the crosswalks in
Figure 5c,d, and the cars in the right side of
Figure 5f. The original SCNN (yellow box) only detected a few objects with obvious false negatives. The Faster R-CNN (green box) and Faster R-CNN+ (purple box) could also detect most of the objects. However, for those large and distorted objects, like crosswalk warning line and crosswalk, they performed worse than our method and their bounding boxes were less accurate.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}