Distributed and Communication-Efficient Spatial Auto-Correlation Subsurface Imaging in Sensor Networks



Abstract
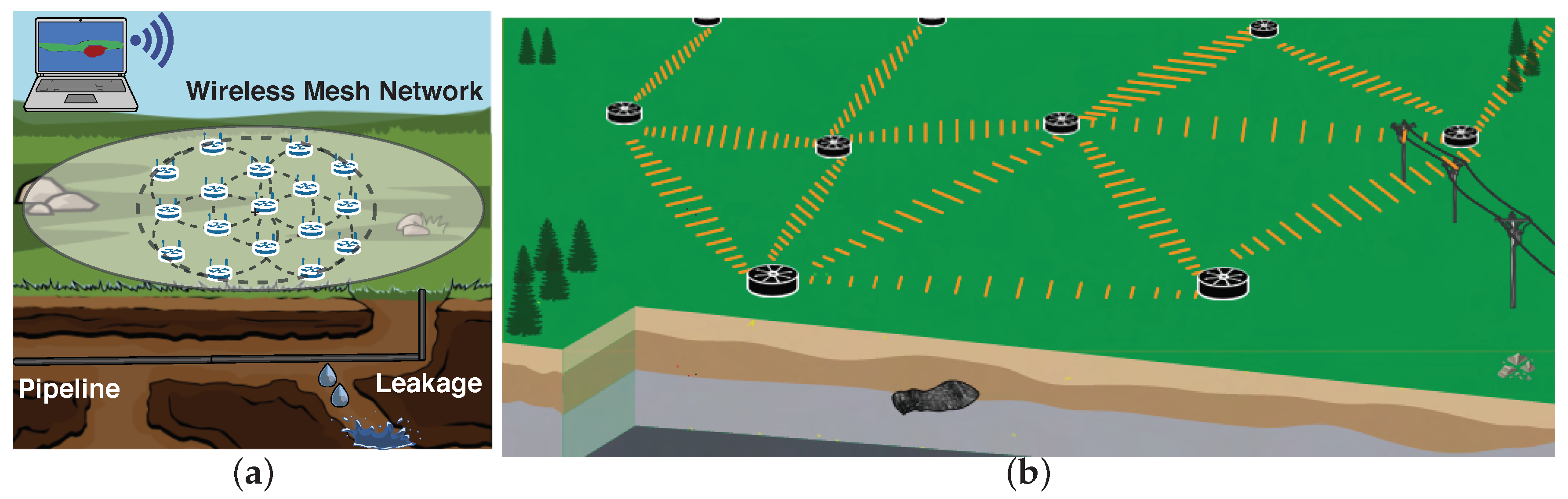
1. Introduction
- The in-situ and real-time computing of shallow subsurface imaging using a proposed distributed spatial autocorrelation technique and ambient noise is introduced.
- A novel communication-reduced method for neighborhood communication between nodes that allows them to estimate the correlation between signals of neighbor nodes using less energy and meeting bandwidth constraints is proposed.
- A field deployment illustrates the usability of the method for detecting shallow infrastructures. The small array was selected only for validation purposes. We emphasize that the same methodology can be used in large arrays since wireless communication can reach several meters, even kilometers with gain antennas.
- An analysis of bandwidth, energy, and communication cost of our method compared to other centralized approaches that require all data to be sent to a central unit is presented.
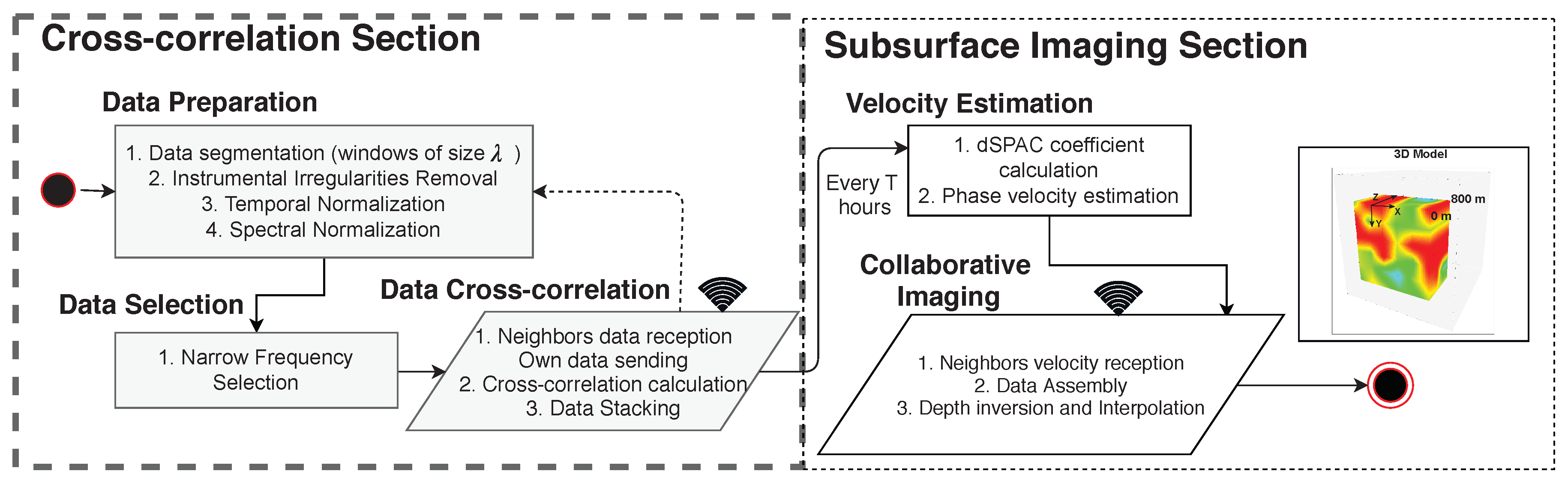
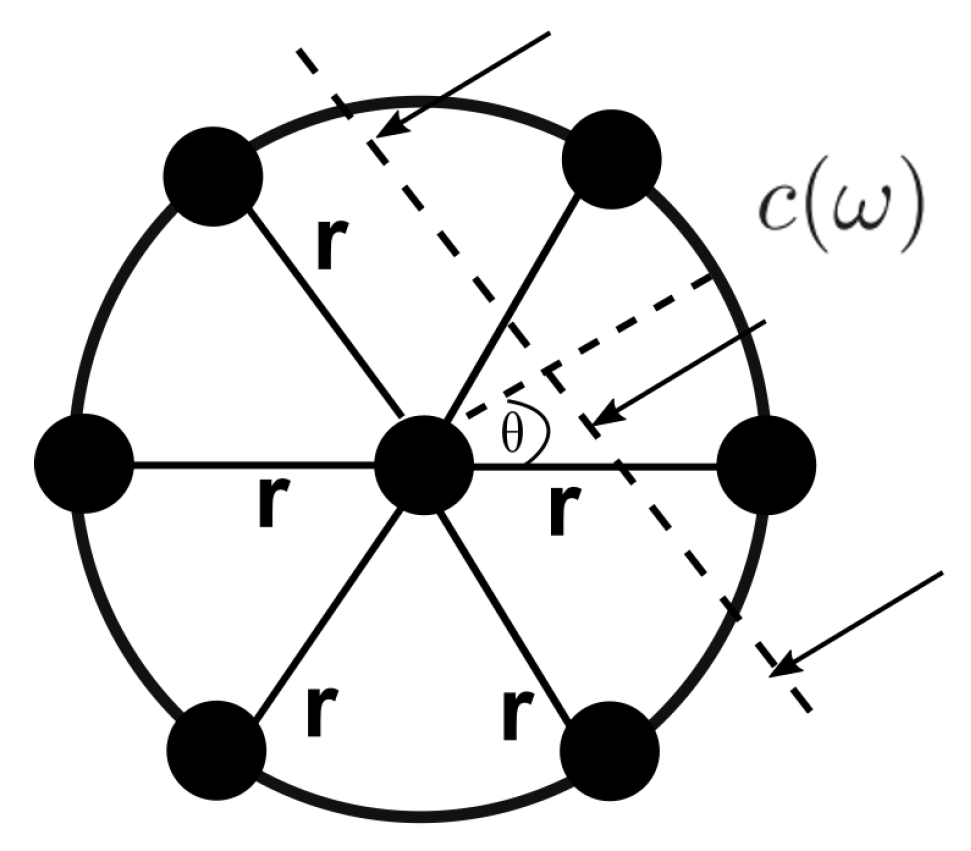
2. In-Situ Cross-Correlation and dSPAC for Ambient Noise Imaging
2.1. System Model
2.2. Signals Cross-Correlation
2.3. Subsurface Imaging
2.4. Limitations of Broadcasting to All Neighbor Nodes
2.5. Scope of the Proposed Model
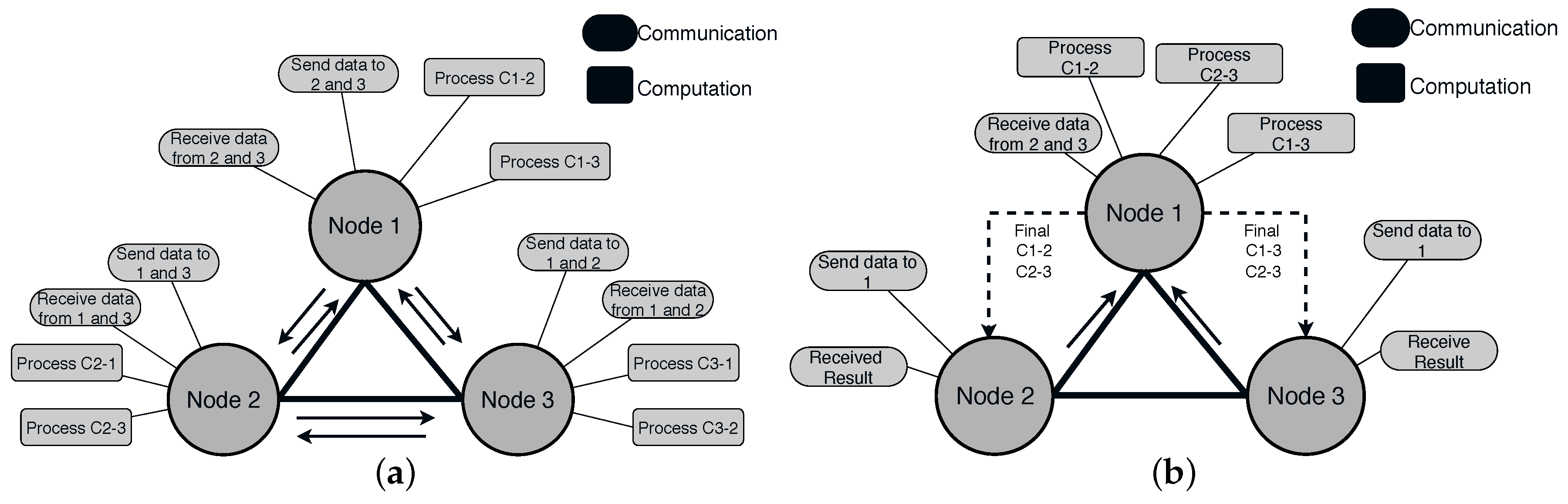
3. Communication-Reduced Model for dSPAC
3.1. Problem Definition
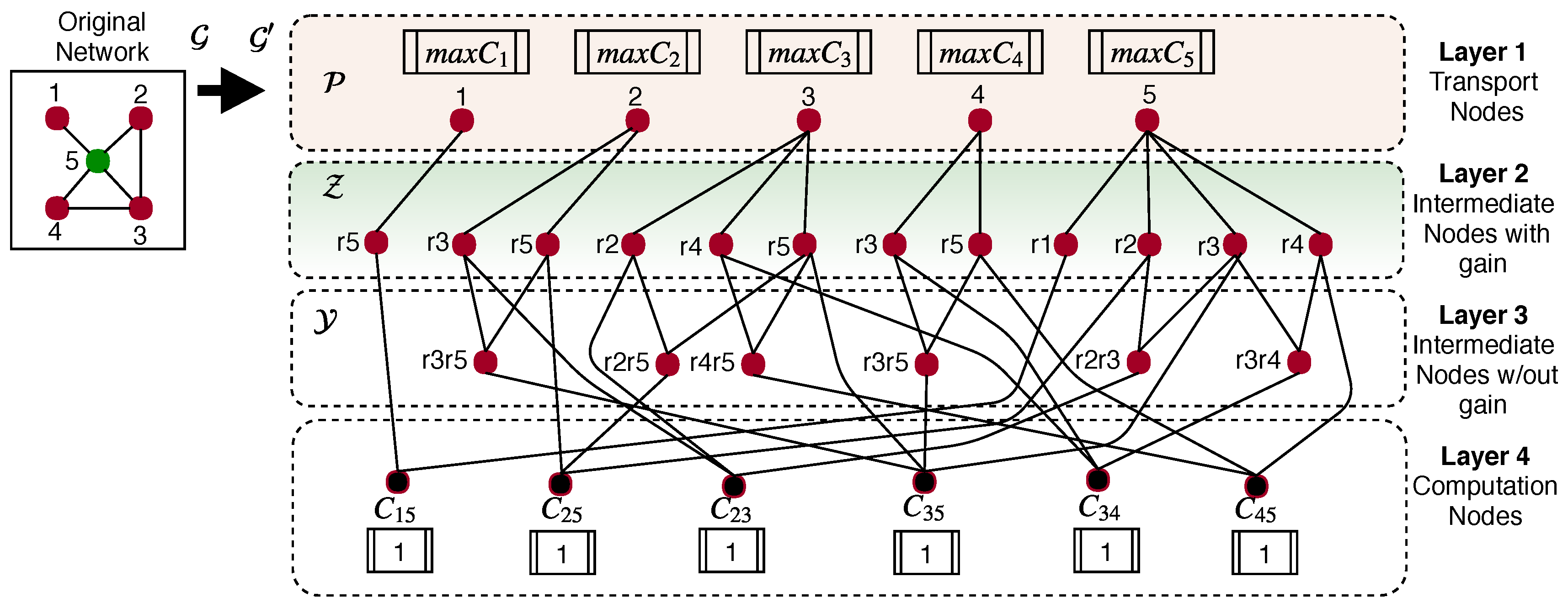
3.2. Network Transformation
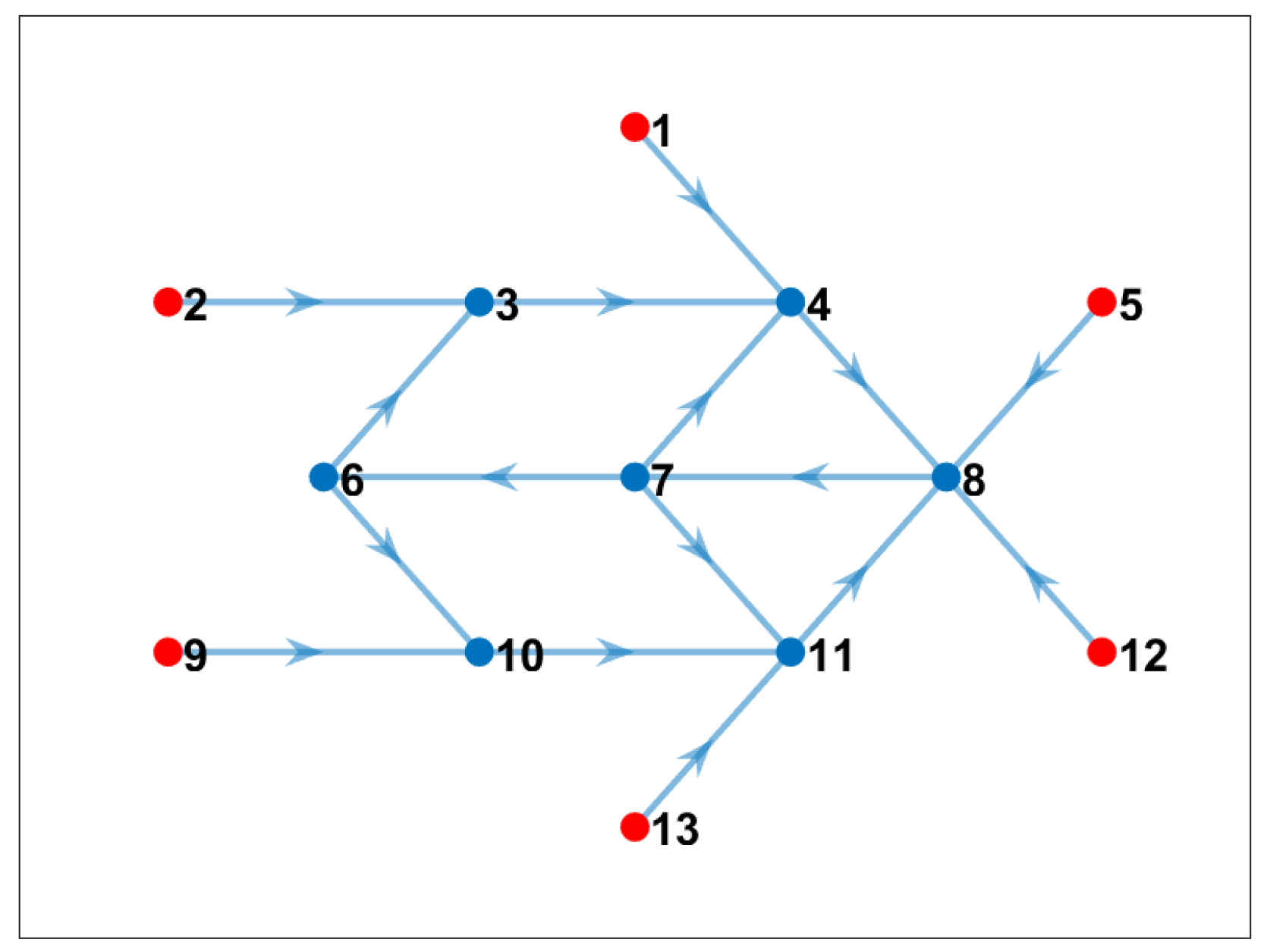
- We set up every node in as a transport node. The set of transport nodes is represented as (Figure 6, Layer 1). The transport nodes are considered to be the nodes that may compute the cross-correlations, and they can be constrained with the maximum number of cross-correlations to compute on it ( where ). If we assume that the computational cost is unimportant, then can be infinite. However, that is not the case for many nodes due to energy consumption. Every transport node produces a cost of λ for every unit that sends to the second layer of nodes. By default, nodes in send one unit to Layer 2.
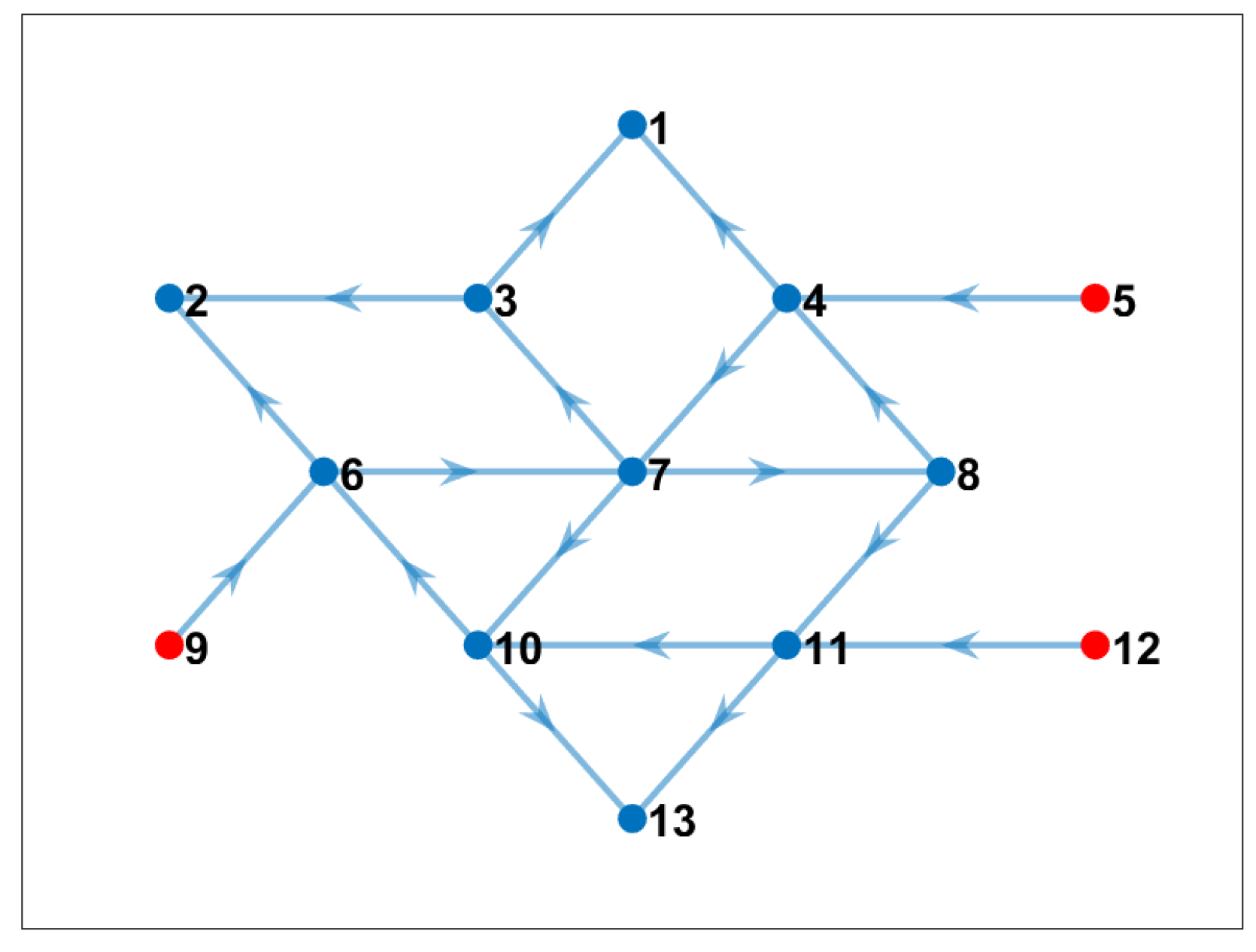
- We set up a set of intermediate nodes with gain as the Layer 2 of the flow network (Figure 6, Layer 2). This layer is composed for the neighbors of each node . For example, if in the original network, Node 2 ( and ) has two neighbors (Nodes 3 and 5), then two new nodes will be added to Layer 2 (), called and , which are going to be directly connected to Node 2 in Layer 1 (). Every node in receives one unit from the transport nodes, and it generates half unit (0.5) for each connection with the Layer 3, or they generate 0 units if they do not have neighbors. There is no cost of transporting data from Layer 2 to other layers.
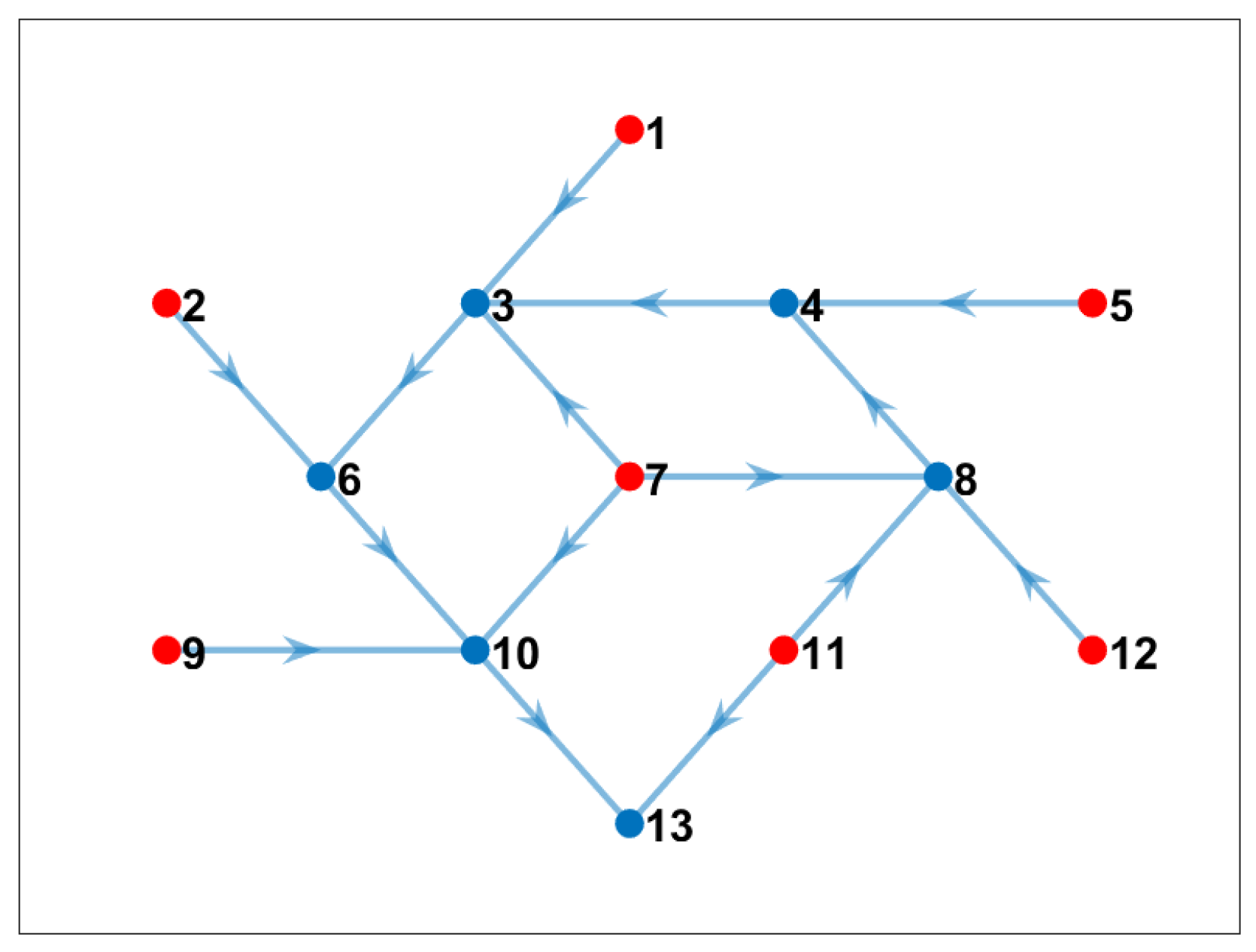
- We set up the Layer 3 as the set of intermediate nodes without gain . This layer of nodes (Figure 6, Layer 3) is composed by the neighbors of node in Layer 2 that also are neighbors of in Layer 1. This layer is used to analyze the neighbors that are able to compute the cross-correlation of other neighbors but not more than one hop of difference. For instance, Node from that is connected to Node 2 from is, itself, neighbor of Node 5 in the original network. Node 2 is also a neighbor of Node 5 in the original network. Then, we add Node to the Layer 3 because Node 3 is neighbor of Node 5 and both are neighbors of Node 2 in the original network. This layer does not generate any cost for unit.
- The Layer 4 is composed of all the possible cross-correlations between neighbors the system needs to compute. For example, in the original network of Figure 6, we need to compute the cross-correlations , , , , , and because those are the neighbors (there is exists a edge) of the nodes in the network.
3.3. Model Design
4. Experiments and Evaluation
4.1. Topology Design
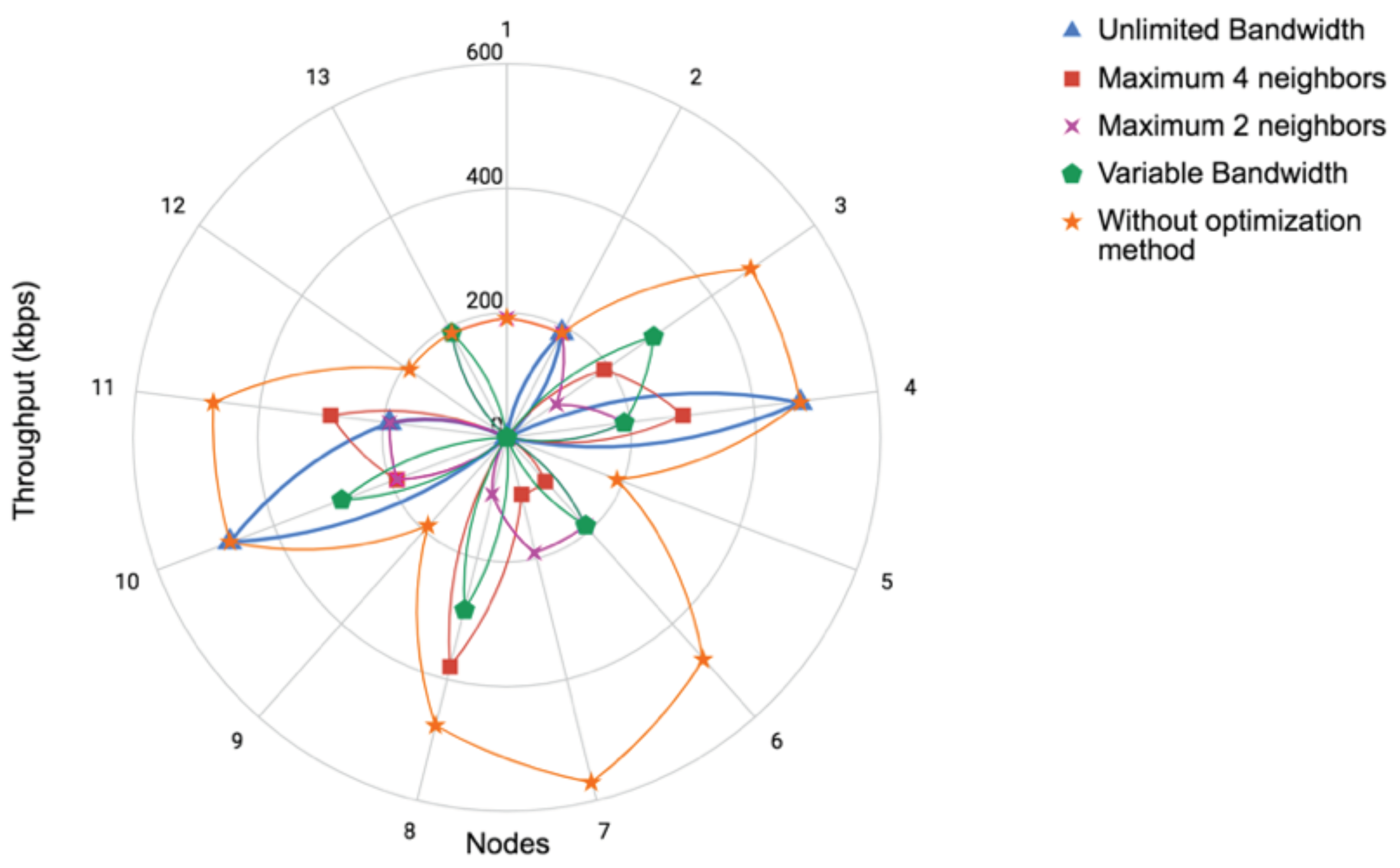
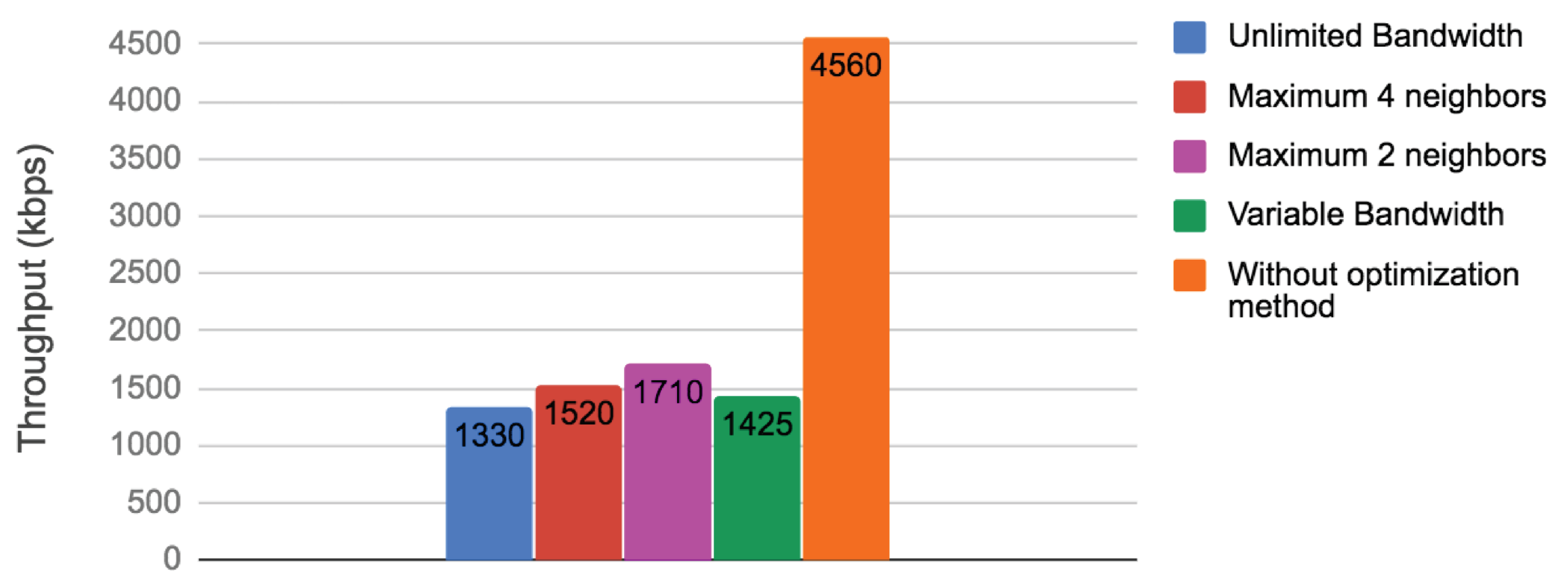
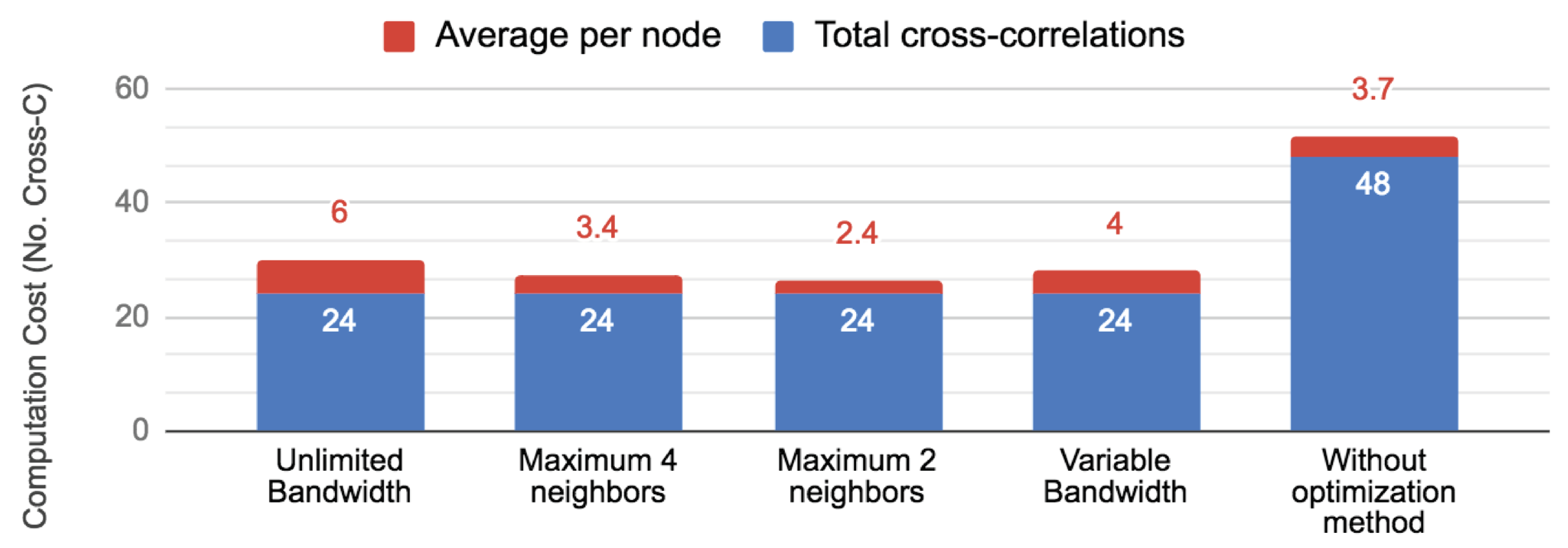
4.2. Experiment 1: Unlimited Bandwidth
4.3. Experiment 2: Limited Bandwidth
4.3.1. Maximum Four Neighbors
4.3.2. Maximum Two Neighbors
4.4. Experiment 3: Variable Bandwidth
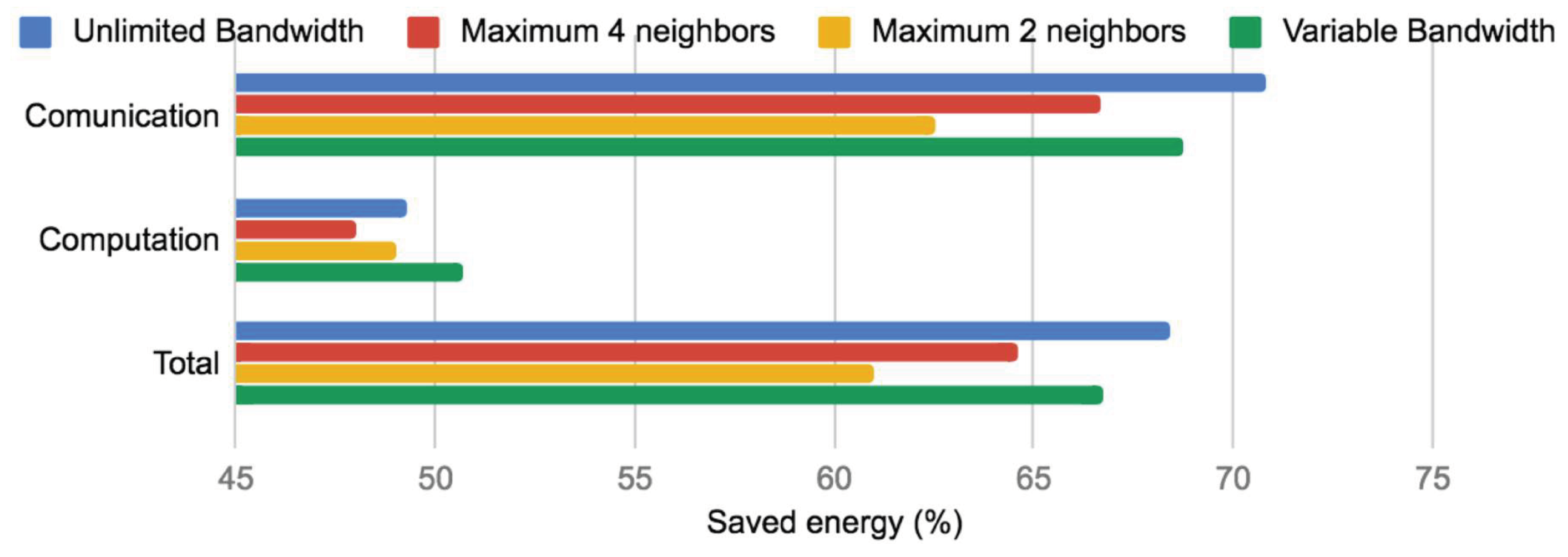
4.5. Bandwidth and Energy Analysis
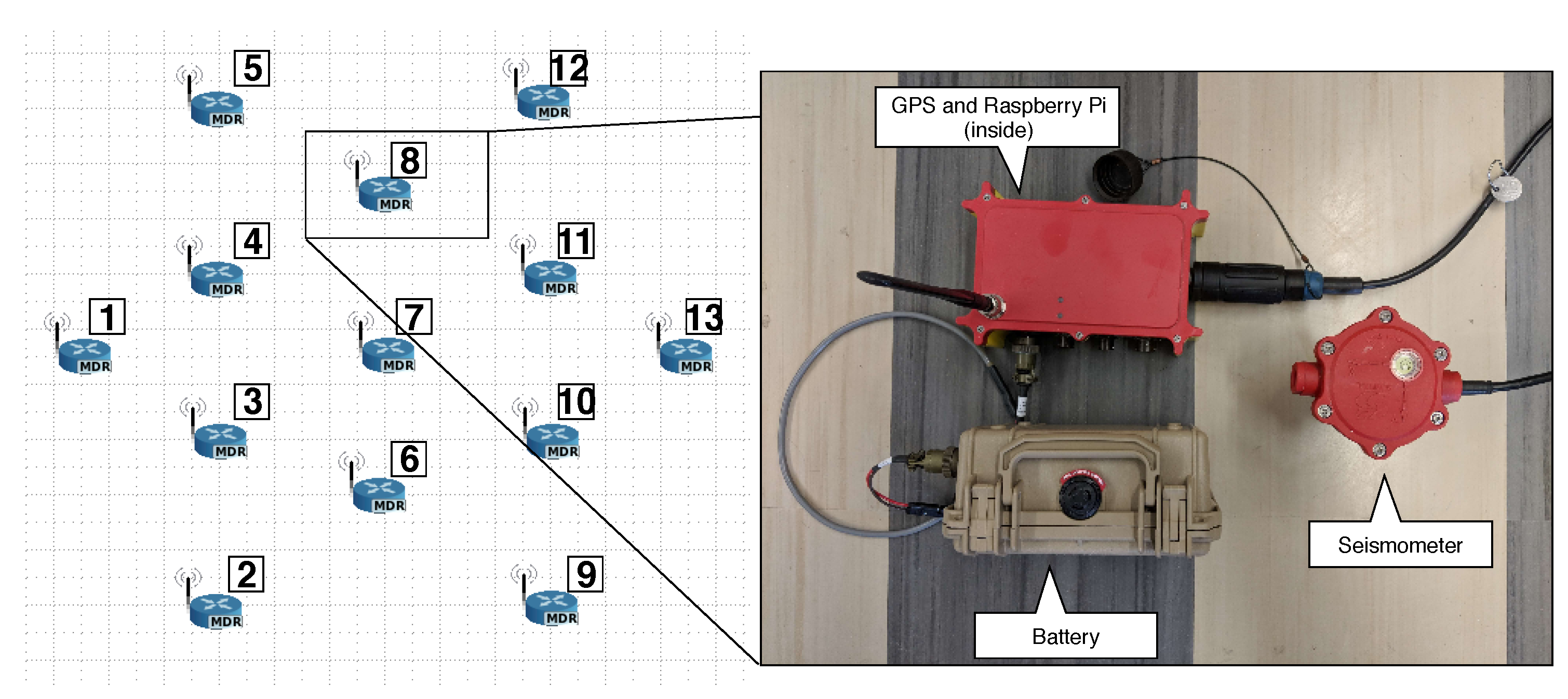
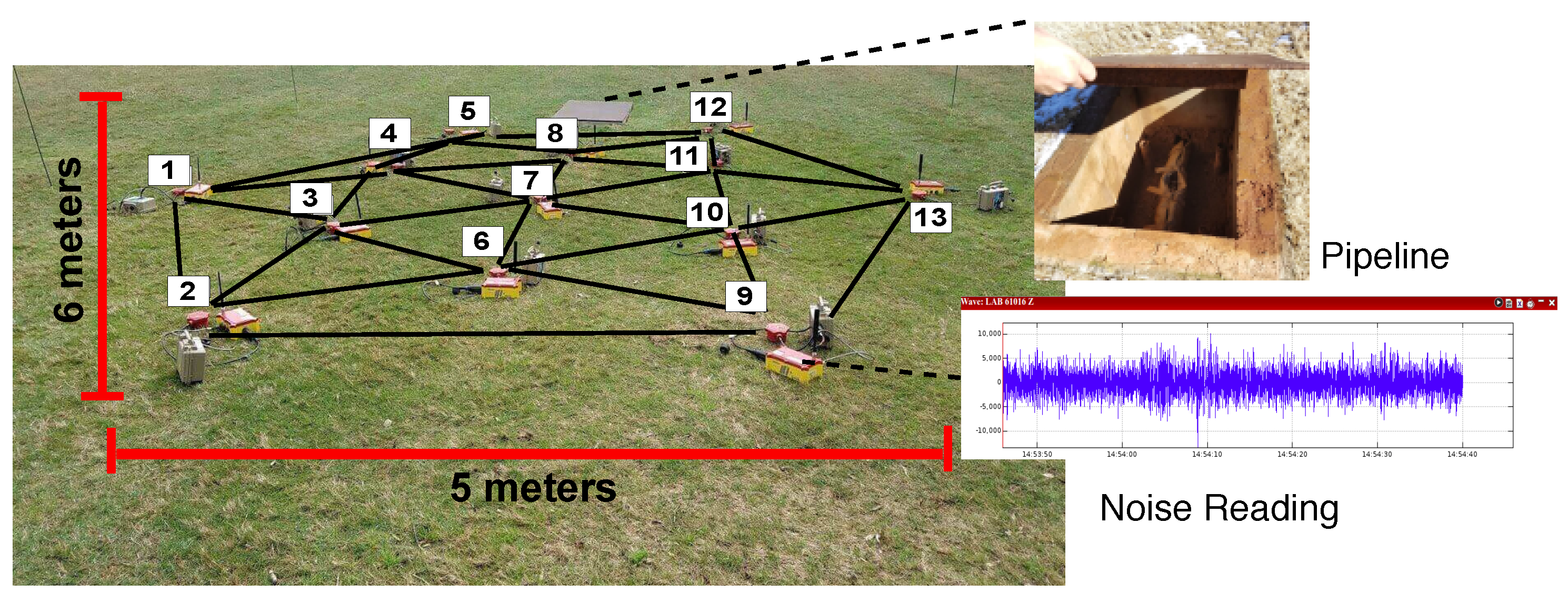
5. Field Test and Evaluations
5.1. Smart Seismic Sensor Nodes
5.2. System Setup
5.3. Cross-Correlation Results
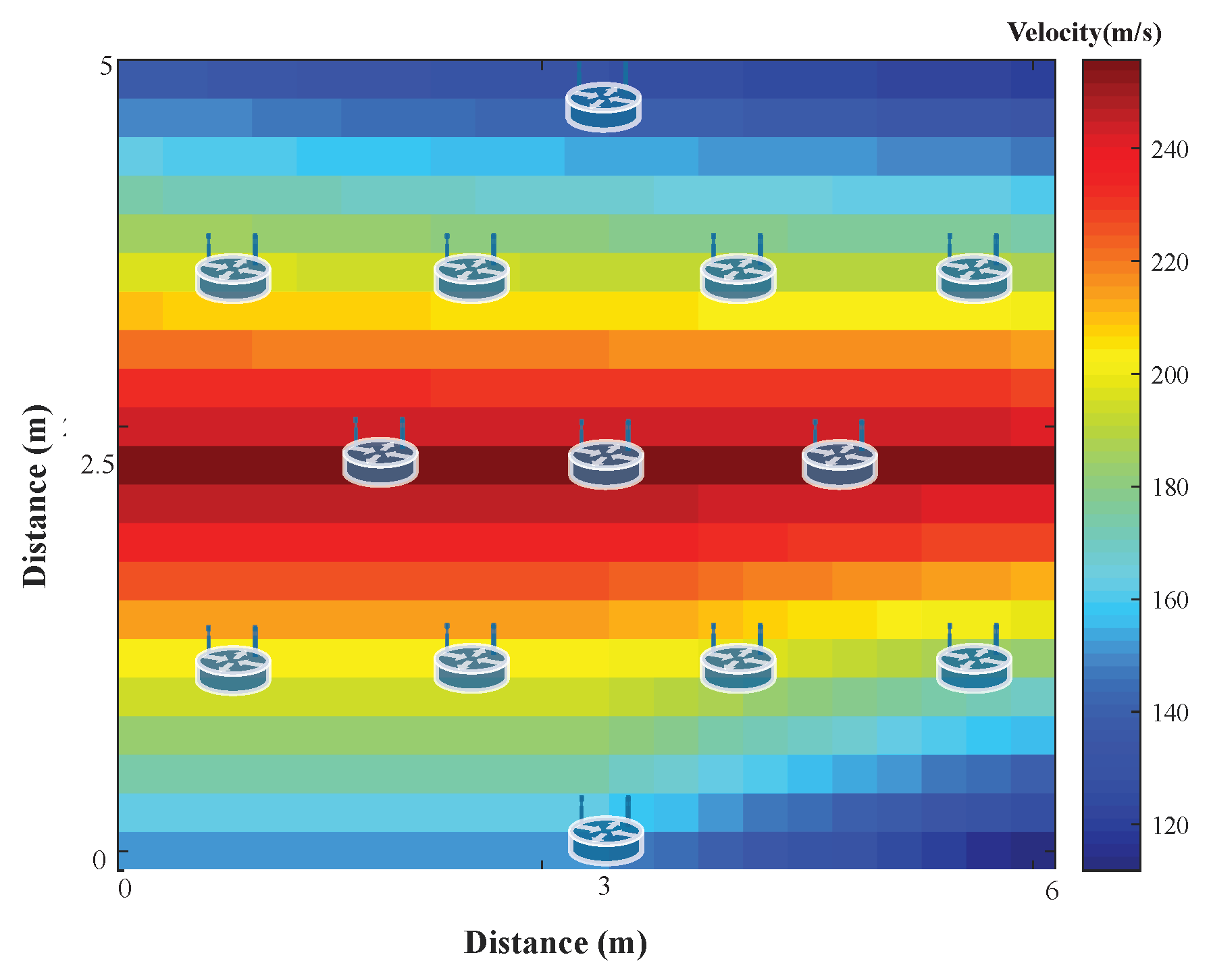
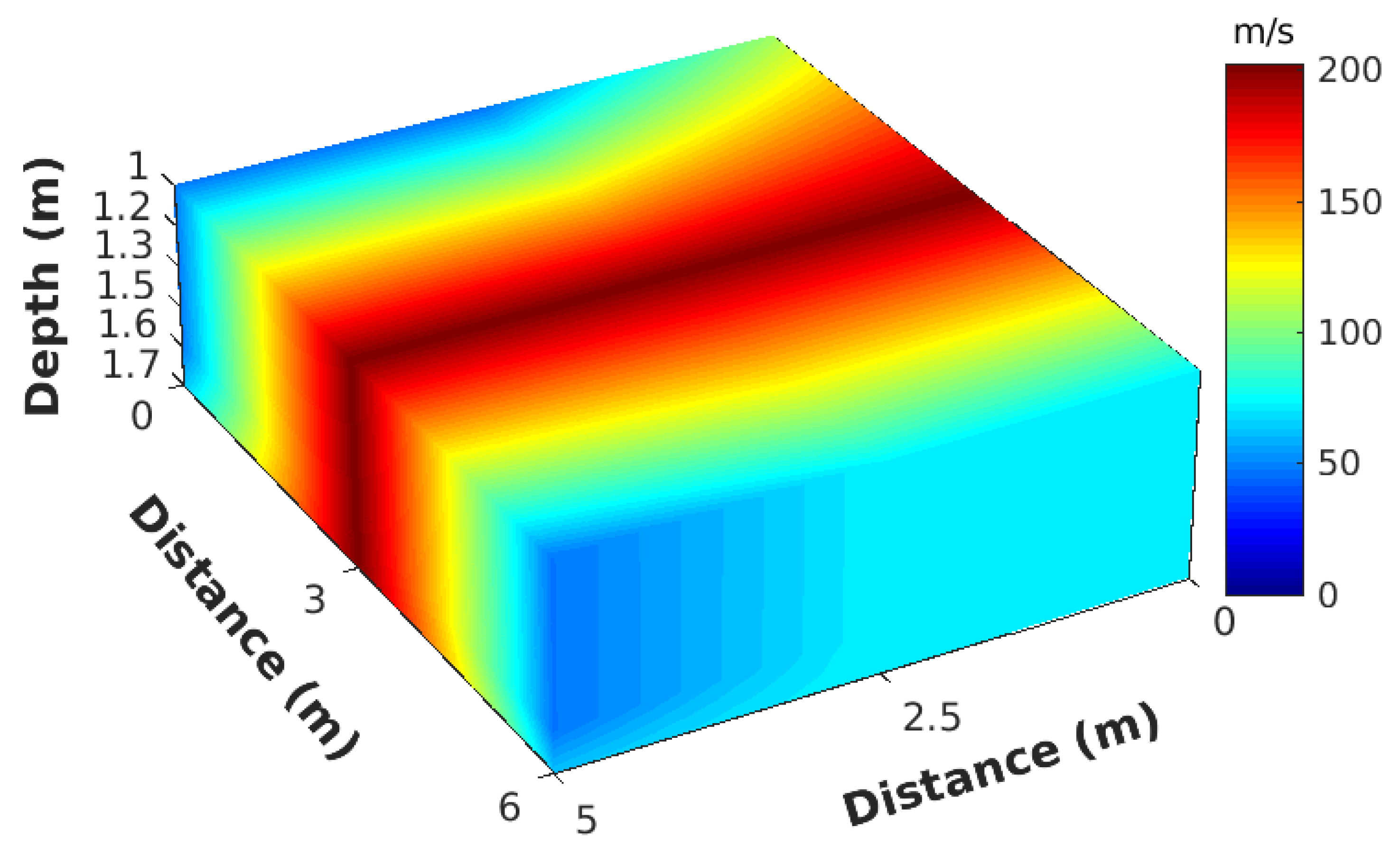
5.4. Subsurface Imaging Results
6. Discussion about Robustness and Communication Limitations
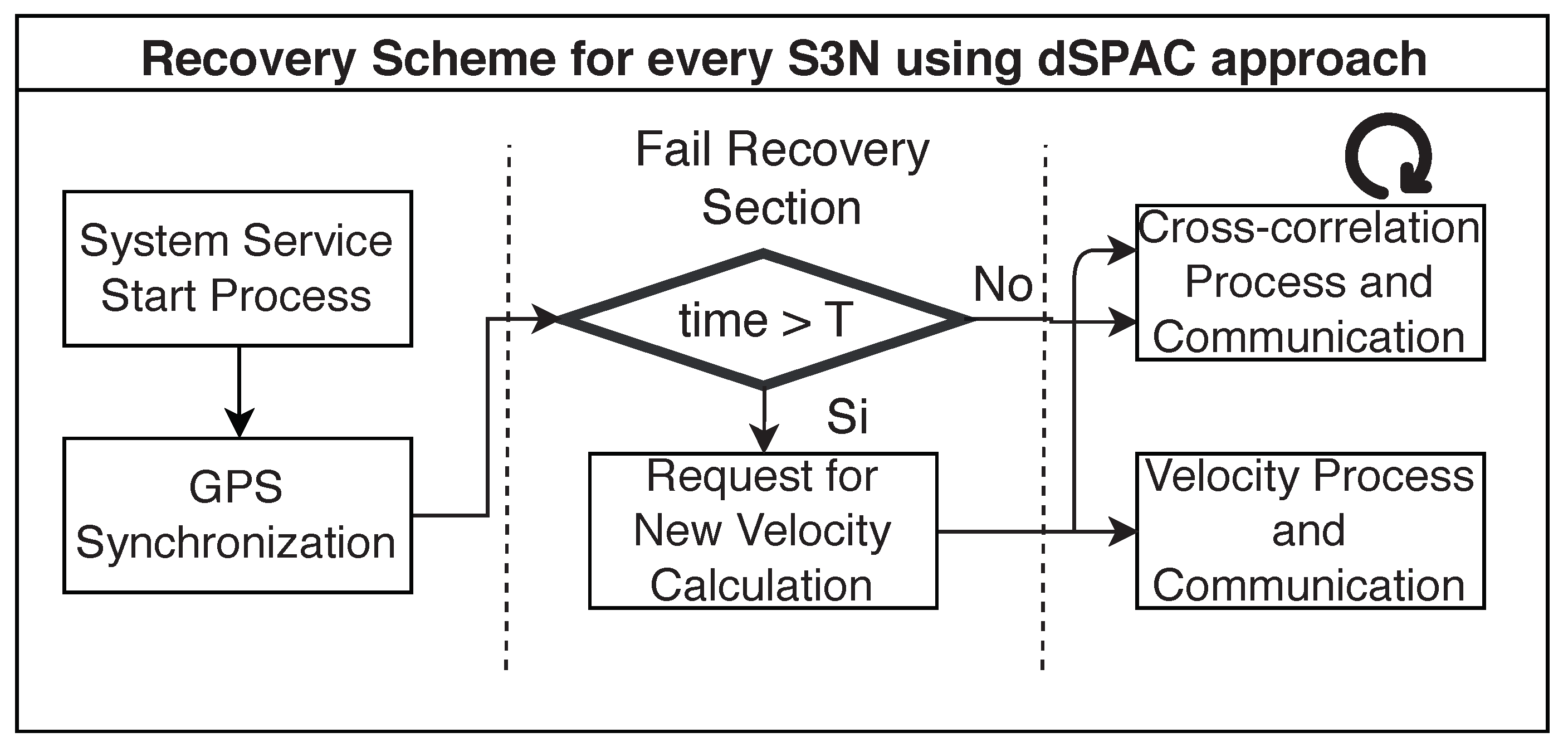
6.1. Robustness of the System
6.2. Communication Limitation Discussion
7. Future Work
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lin, F.C.; Moschetti, M.P.; Ritzwoller, M.H. Surface wave tomography of the western United States from ambient seismic noise: Rayleigh and Love wave phase velocity maps. Geophys. J. Int. 2008, 173, 281–298. [Google Scholar] [CrossRef]
- Moschetti, M.P.; Ritzwoller, M.H.; Lin, F.; Yang, Y. Crustal shear wave velocity structure of the western United States inferred from ambient seismic noise and earthquake data. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Brenguier, F.; Campillo, M.; Hadziioannou, C.; Shapiro, N.M.; Nadeau, R.M.; Larose, E. Postseismic Relaxation Along the San Andreas Fault at Parkfield from Continuous Seismological Observations. Science 2008, 321, 1478–1481. [Google Scholar] [CrossRef] [PubMed]
- Duputel, Z.; Ferrazzini, V.; Brenguier, F.; Shapiro, N.M.; Campillo, M.; Nercessian, A. Real time monitoring of relative velocity changes using ambient seismic noise at the Piton de la Fournaise volcano (La Réunion) from January 2006 to June 2007. J. Volcanol. Geotherm. Res. 2009, 184, 164–173. [Google Scholar] [CrossRef]
- Mordret, A.; Roux, P.; Boué, P.; Ben-Zion, Y. Shallow three-dimensional structure of the San Jacinto fault zone revealed from ambient noise imaging with a dense seismic array. Geophys. J. Int. 2018, 216, 896–905. [Google Scholar] [CrossRef]
- Song, W.Z.; Huang, R.; Xu, M.; Shirazi, B.A.; LaHusen, R. Design and Deployment of Sensor Network for Real-Time High-Fidelity Volcano Monitoring. IEEE Trans. Parallel Distrib. Syst. 2010, 21, 1658–1674. [Google Scholar] [CrossRef]
- Song, W.Z.; Huang, R.; Xu, M.; Ma, A.; Shirazi, B.; LaHusen, R. Air-dropped Sensor Network for Real-time High-fidelity Volcano Monitoring. In Proceedings of the 7th Annual International Conference on Mobile Systems, Applications and Services (MobiSys), Kraków, Poland, 22–25 June 2009; pp. 305–318. [Google Scholar]
- Shi, L.; Song, W.Z.; Xu, M.; Xiao, Q.; Lees, J.M.; Xing, G. Imaging Volcano Seismic Tomography in Sensor Networks. In Proceedings of the 10th Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks (IEEE SECON), Cambridge, MA, USA, 20–23 May 2013. [Google Scholar]
- Song, W.; Li, F.; Valero, M.; Zhao, L. Toward Creating a Subsurface Camera. Sensors 2019, 19, 301. [Google Scholar] [CrossRef]
- Valero, M.; Li, F.; Wang, S.; Lin, F.C.; Song, W. Real-time Cooperative Analytics for Ambient Noise Tomography in Sensor Networks. IEEE Trans. Signal Inf. Process. Netw. 2018, 5, 375–389. [Google Scholar] [CrossRef]
- Valero, M.; Li, F.; Li, X.; Song, W. Imaging Subsurface Civil Infrastructure with Smart Seismic Network. In Proceedings of the 37th IEEE International Performance Computing and Communications Conference (IPCCC), Orlando, FL, USA, 17–19 November 2018. [Google Scholar]
- Bettig, B.; Bard, P.; Scherbaum, F.; Riepl, J.; Cotton, F.; Cornou, C.; Hatzfeld, D. Analysis of dense array noise measurements using the modified spatial auto-correlation method (SPAC): Application to the Grenoble area. Bollettino di Geofisica Teorica ed Appl. 2001, 42, 281–304. [Google Scholar]
- Luo, S.; Luo, Y.; Zhu, L.; Xu, Y. On the reliability and limitations of the SPAC method with a directional wavefield. J. Appl. Geophys. 2016, 126, 172–182. [Google Scholar] [CrossRef]
- Setiawan, B.; Jaksa, M.; Griffith, M.; Love, D. Estimating near surface shear wave velocity using the SPAC method at a site exhibiting low to high impedance contrast. Soil Dyn. Earthq. Eng. 2019, 122, 16–38. [Google Scholar] [CrossRef]
- Bensen, G.D.; Ritzwoller, M.H.; Barmin, M.P.; Levshin, A.L.; Lin, F.; Moschetti, M.P.; Shapiro, N.M.; Yang, Y. Processing seismic ambient noise data to obtain reliable broad-band surface wave dispersion measurements. Geophys. J. Int. 2007, 169, 1239–1260. [Google Scholar] [CrossRef]
- Valero, M.; Kamath, G.; Clemente, J.; Lin, F.C.; Xie, Y.; Song, W. Real-time Ambient Noise Subsurface Imaging in Distributed Sensor Networks. In Proceedings of the 3rd IEEE International Conference on Smart Computing (SMARTCOMP 2017), Hong Kong, China, 29–31 May 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Tawanda, T. A node merging approach to the transhipment problem. Int. J. Syst. Assur. Eng. Manag. 2017, 8, 370–378. [Google Scholar] [CrossRef]
- Wu, S.M.; Ward, K.M.; Farrell, J.; Lin, F.C.; Karplus, M.; Smith, R.B. Anatomy of Old Faithful from subsurface seismic imaging of the Yellowstone Upper Geyser Basin. Geophys. Res. Lett. 2017, 44, 10240–10247. [Google Scholar] [CrossRef]
- Lin, F.C.; Ritzwoller, M.H.; Snieder, R. Eikonal tomography: Surface wave tomography by phase front tracking across a regional broad-band seismic array. Geophys. J. Int. 2009, 177, 1091–1110. [Google Scholar] [CrossRef]
- Madisetti, V. The Digital Signal Processing Handbook; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Grion, S.; Mazzotti, A. Stacking weights determination by means of SVD and cross-correlation. In SEG Technical Program Expanded Abstracts 1998; Society of Exploration Geophysicists: Tulsa, OK, USA, 1998; pp. 1135–1138. [Google Scholar]
- Aki, K. Space and time spectra of stationary stochastic waves, with special reference to microtremors. Bull. Earth. Res. Inst. 1957, 35, 415–456. [Google Scholar]
- Asten, M.W. On bias and noise in passive seismic data from finite circular array data processed using SPAC methodsBias and noise in passive seismic data. Geophysics 2006, 71, V153–V162. [Google Scholar] [CrossRef]
- Nakahara, H. Formulation of the spatial autocorrelation (SPAC) method in dissipative media. Geophys. J. Int. 2012, 190, 1777–1783. [Google Scholar] [CrossRef]
- Yao, H.; van Der Hilst, R.D.; Maarten, V. Surface-wave array tomography in SE Tibet from ambient seismic noise and two-station analysis–I. Phase velocity maps. Geophys. J. Int. 2006, 166, 732–744. [Google Scholar] [CrossRef]
- Jain, M.; Dovrolis, C. End-to-end available bandwidth: Measurement methodology, dynamics, and relation with TCP throughput. IEEE/ACM Trans. Netw. 2003, 11, 537–549. [Google Scholar] [CrossRef]
- Upton, E. Raspberry Pi 3. 2016. Available online: https://www.raspberrypi.org/products/raspberry-pi-3-model-b (accessed on 11 January 2019).
- Pottie, G.J.; Kaiser, W.J. Wireless integrated network sensors. Commun. ACM 2000, 43, 51–58. [Google Scholar] [CrossRef]
- Kamath, G.; Shi, L.; Chow, E.; Song, W.Z. Distributed Tomography with Adaptive Mesh Refinement in Sensor Networks. Int. J. Sens. Netw. 2015, 23, 40–52. [Google Scholar] [CrossRef]
- Kamath, G.; Song, W. Tomographic Imaging in Sensor Networks. In Industrial Tomography; Woodhead Publication: Sawston, UK, 2014; Chapter 17; pp. 285–301. [Google Scholar]
- Chen, P.; Lee, E.J. Full-3D Seismic Waveform Inversion: Theory, Software and Practice; Springer: Berlin, Germany, 2015. [Google Scholar]
- Wickert. Sampling and Aliasing. 2011. Available online: http://www.eas.uccs.edu/~mwickert/ece2610/lecture_notes/ece2610_chap4.pdf (accessed on 12 December 2018).
- Clemente, J.; Valero, M.; Mohammadpour, J.; Li, X.; Song, W. Fog Computing Middleware for Distributed Cooperative Data Analytics. In Proceedings of the IEEE World Fog Congress 2017 (WFC 2017), Santa Clara, CA, USA, 30 October–1 November 2017. [Google Scholar]
- Ozdemir, T.; Roy, S.; Berkowitz, R.S. Imaging of a shallow subsurface objects: An experimental investigation. IEEE Trans. Geosci. Remote Sens. 1992, 30, 472–481. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.E.; Zhang, H.; Ku, T. Optimized passive seismic interferometry for bedrock detection: A Singapore case study. In SEG Technical Program Expanded Abstracts 2018; Society of Exploration Geophysicists: Tulsa, OK, USA, 2018; pp. 2506–2510. [Google Scholar]
- Bachrach, R.; Nur, A. High-resolution shallow-seismic experiments in sand, Part I: Water table, fluid flow, and saturation. Geophysics 1998, 63, 1225–1233. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| Communication cost between nodes u and v. | |
| Number of Packets between nodes u and v. | |
| Maximum number of packets to transmit simultaneously by a node u. (). | |
| Available bandwidth. | |
| Size of the packet to be sent by u. | |
| h | Gain for each node connection between Layer 2 and Layer 3 in . |
| Set of nodes connected by output edges with node u Outflow. | |
| Set of nodes connected by input edges with node u Inflow. | |
| r | Set of intermediate nodes with gain. |
| g | set of intermediate nodes without gain. |
| Needed Cross-Correlations | |||||
|---|---|---|---|---|---|
| Node Number | Computed Cross-Correlation | Node Number | Computed Cross-Correlation |
|---|---|---|---|
| 2 | 10 | ||
| 4 | |||
| 11 | |||
| Node Number | Computed Cross-Correlation | Node Number | Computed Cross-Correlation |
|---|---|---|---|
| 4 | 3 | ||
| 7 | |||
| 10 | |||
| 6 | |||
| 8 | |||
| 11 | |||
| Node Number | Computed Cross-Correlation | Node Number | Computed Cross-Correlation |
|---|---|---|---|
| 1 | 6 | ||
| 2 | 8 | ||
| 10 | |||
| 3 | 11 | ||
| 4 | |||
| 13 | |||
| 7 |
| Node Number | Computed Cross-Correlation | Node Number | Computed Cross-Correlation |
|---|---|---|---|
| 3 | 8 | ||
| 4 | 10 | ||
| 6 | |||
| 13 | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valero, M.; Li, F.; Clemente, J.; Song, W. Distributed and Communication-Efficient Spatial Auto-Correlation Subsurface Imaging in Sensor Networks. Sensors 2019, 19, 2427. https://doi.org/10.3390/s19112427
Valero M, Li F, Clemente J, Song W. Distributed and Communication-Efficient Spatial Auto-Correlation Subsurface Imaging in Sensor Networks. Sensors. 2019; 19(11):2427. https://doi.org/10.3390/s19112427
Chicago/Turabian StyleValero, Maria, Fangyu Li, Jose Clemente, and Wenzhan Song. 2019. "Distributed and Communication-Efficient Spatial Auto-Correlation Subsurface Imaging in Sensor Networks" Sensors 19, no. 11: 2427. https://doi.org/10.3390/s19112427
APA StyleValero, M., Li, F., Clemente, J., & Song, W. (2019). Distributed and Communication-Efficient Spatial Auto-Correlation Subsurface Imaging in Sensor Networks. Sensors, 19(11), 2427. https://doi.org/10.3390/s19112427