Wearable Embedded Intelligence for Detection of Falls Independently of on-Body Location


Abstract
:1. Introduction
2. Materials and Methods
2.1. Datasets
2.2. Fall Detection Algorithm
- Stable to Unstable State—When the fall detector algorithm is enabled and the subject is not moving, the system will start in the Stable state. Then, if some relevant acceleration changes are detected, the algorithm transits to the Unstable state. This change in acceleration is evaluated calculating the magnitude of the acceleration.
- Unstable to Falling State—When in the unstable state, a significant decrease in acceleration can indicate that the user is experiencing a free fall, Falling State. To check if the decrease in acceleration values occur according to what is expected during a fall, the ratio between the magnitude of the linear acceleration and the magnitude of acceleration at each moment is evaluated.
- Falling to Impact State—If a fall is truly occurring, when the subject hits the ground, a sudden and significant increase in the acceleration and a large difference in body orientation occurs, corresponding to the change from standing/sitting positions to the lying position occurring after the fall. Thus, when the state machine is in the falling state, two different features are evaluated: the magnitude of acceleration and the angle between two different vectors: the average acceleration vector in this state and the average acceleration vector obtained before entering on the Falling state.
- Impact to Broadcast of the fall—After the impact, the system starts an Unconscious watcher that will check if the user has recovered from the fall or not. If the user does not move during five seconds after the fall, a fall alert will be broadcasted. If some movement is detected, the system will restart the process in the Unstable state. This detection of movement is accomplished by evaluating the values of the acceleration magnitude during the Unconscious watcher.
2.3. Wearable Implementation
2.4. Algorithm Evaluation
2.5. Accelerometer Sampling Rate Analysis
2.6. State Machine Thresholds Optimization
- Perform 10 times a random repeated stratified sampling of the dataset DS-1 with train/test ratio of 0.7, meaning, 70% for the train set and 30% for the test set.
- For each split, randomly undersample the majority class on the train set, in this case the non-fall movements, 10 times.
- For each undersampled set, randomly generate 100 thresholds sets according to the allowed lower and higher bounds set for each parameter.
- Train each set of thresholds with the corresponding train dataset. Save the 50 best and their respective test set.
- Test the 50 selected sets of thresholds with the corresponding test set.
- From the results obtained for all iterations of dataset splitting and undersampling, the 50 sets of thresholds that presented the best result during the test with the test part of the dataset were chosen.
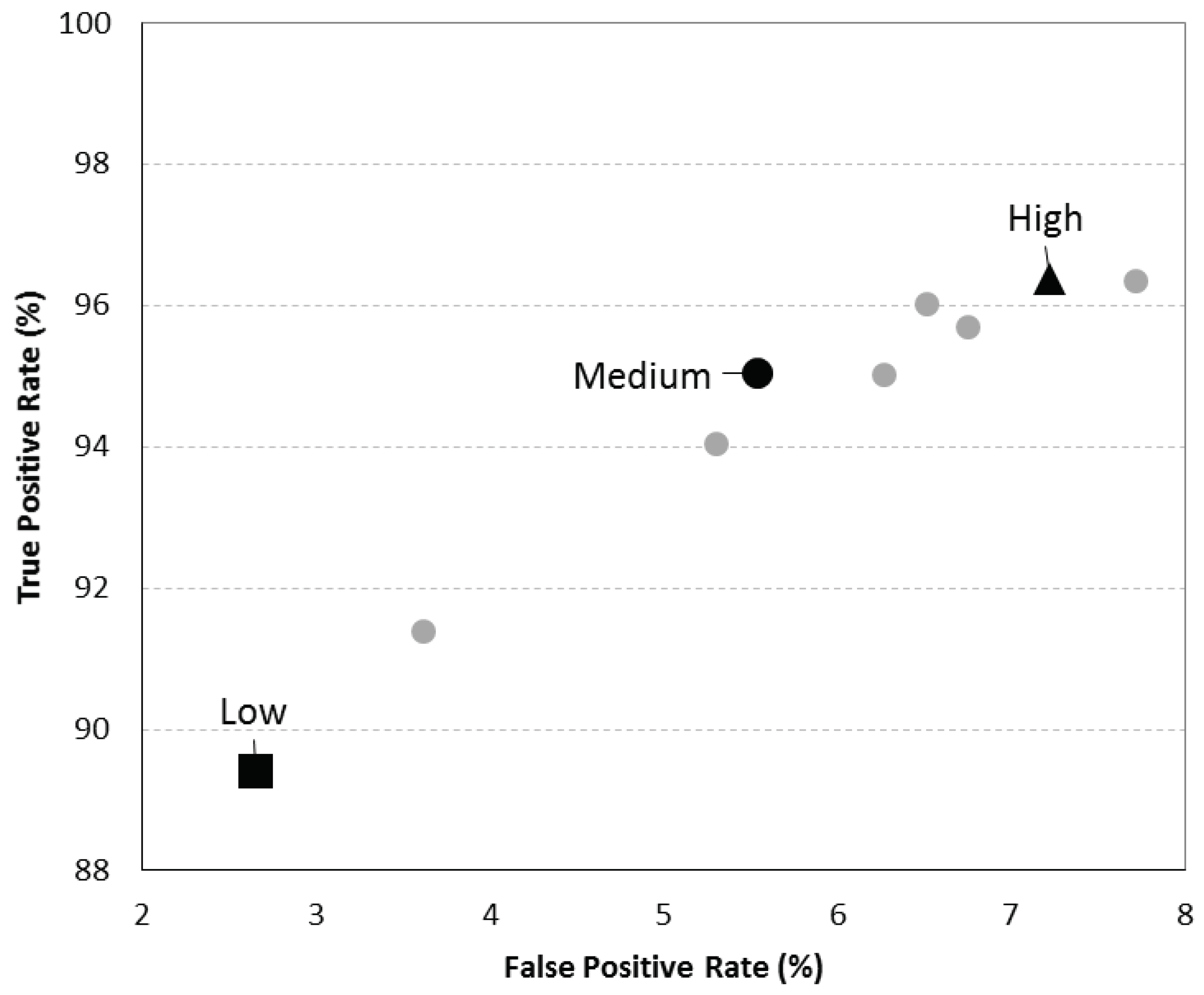
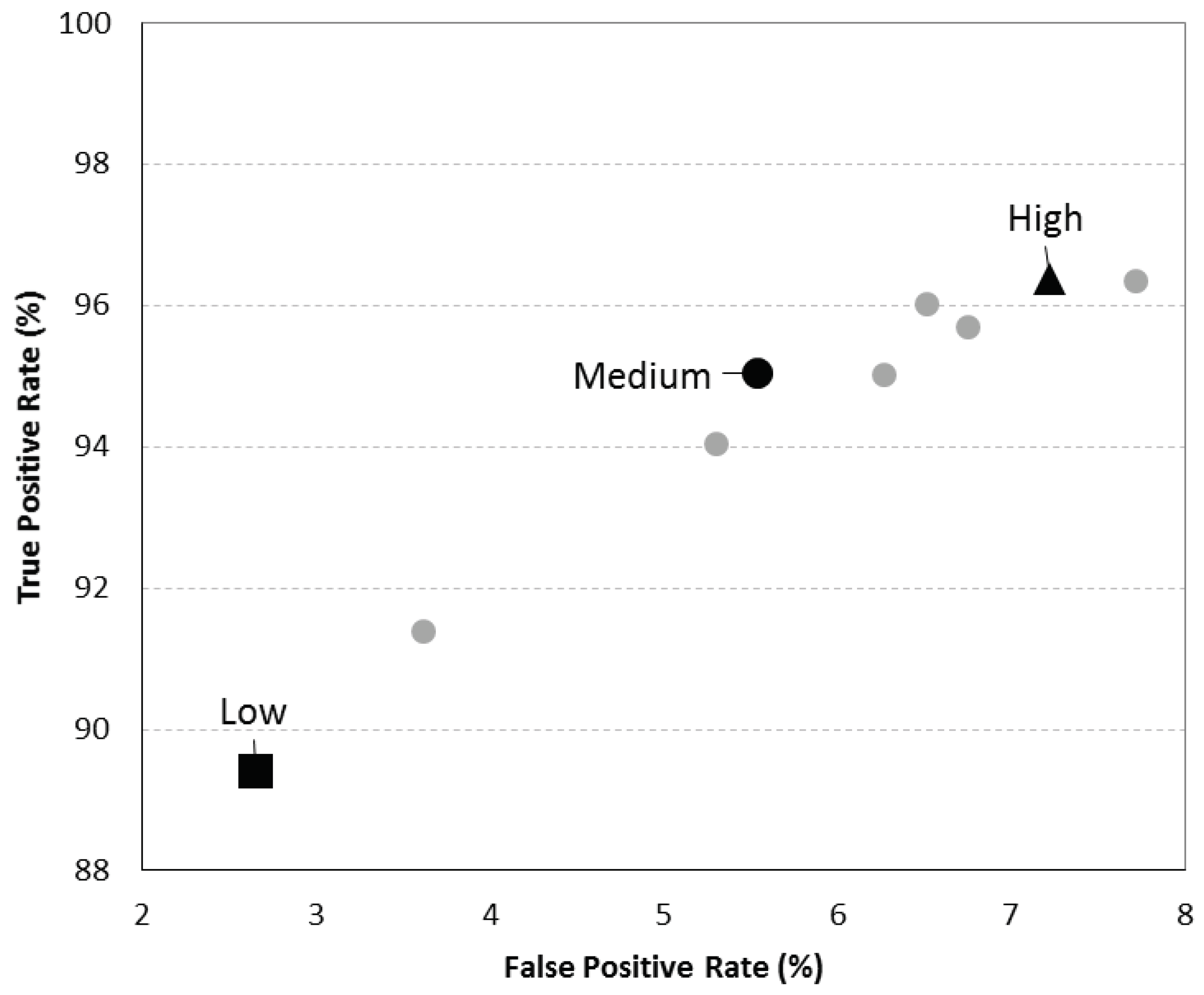
2.6.1. Sensitivity Level Sets Selection
2.7. Algorithm Validation
Comparison of on Body Positions Performance
3. Results
3.1. Threshold Optimization—100 Hz
3.2. Thresholds Optimization—50 Hz
3.3. Comparison between 50 Hz vs. 100 Hz Sets
3.4. Results by Type of Movement
3.5. Algorithm Validation in Continuous Usage
3.5.1. Comparison of on-Body Positions Performance
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Networks |
| CPU | Central Processing Unit |
| FA | False Alarm |
| FN | False Negative |
| FP | False Positive |
| Youden Index | |
| ROC | Receiver Operating Characteristic |
| Sens | Sensitivity |
| Spec | Specificity |
| Sampling rate | |
| TOC | Total Operating Characteristic |
| TN | True Negative |
| TP | True Positive |
References
- WHO. Who Global Report on Falls Prevention in Older Age; Tech. Rep; WHO: Genava, Switzerland, 2007. [Google Scholar]
- Age UK. Stop Falling: Start Saving Lives and Money. 2013. Available online: http://www.ageuk.org.uk/documents/en-gb/campaigns/stop_falling_report_web.pdf?dtrk=true (accessed on 30 August 2018).
- Burns, E.R.; Stevens, J.A.; Lee, R. The direct costs of fatal and non-fatal falls among older adults—United States. J. Saf. Res. 2016, 58, 99–103. [Google Scholar] [CrossRef]
- van Schooten, K.S.; Pijnappels, M.; Rispens, S.M.; Elders, P.J.M.; Lips, P.J.A.; Daffertshofer, A.; Beek, P.J.; van Dieën, J.H. Daily-life gait quality as predictor of falls in older people: A 1-year prospective cohort study. PLoS ONE 2016. [Google Scholar] [CrossRef]
- Bruijn, S.M.; Meijer, O.G.; Beek, P.J.; van Dieën, J.H. Assessing the stability of human locomotion: A review of current measures. J. R. Soc. Interface 2013, 10, 53. [Google Scholar] [CrossRef] [PubMed]
- Noury, N.; Fleury, A.; Rumeau, P.; Bourke, A.; Laighin, G.; Rialle, V.; Lundy, J.E. Fall detection–principles and methods. In Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 23–26 August 2007; pp. 1663–1666. [Google Scholar] [CrossRef]
- Pannurat, N.; Thiemjarus, S.; Nantajeewarawat, E. Automatic fall monitoring: A review. Sensors 2014, 14, 12900–12936. [Google Scholar] [CrossRef] [PubMed]
- Mubashir, M.; Shao, L.; Seed, L. A survey on fall detection: Principles and approaches. Neurocomputing 2013, 100, 144–152. [Google Scholar] [CrossRef]
- Aguiar, B.; Rocha, T.; Silva, J.; Sousa, I. Accelerometer-Based Fall Detection for Smartphones. In Proceedings of the IEEE International Symposium on Medical Measurement and Applications (MEMEA), Lisbon, Portugal, 11–12 June 2014. [Google Scholar] [CrossRef]
- Shahza, A.; Kim, K. FallDroid: An Automated Smart Phone based Fall Detection System using Multiple Kernel Learning. IEEE Trans. Ind. Inform. 2019, 15, 35–44. [Google Scholar] [CrossRef]
- Schwickert, L.; Becker, C.; Lindemann, U.; Maréchal, C.; Bourke, A.; Chiari, L.; Helbostad, J.L.; Zijlstra, W.; Aminian, K.; Todd, C. Fall detection with body-worn sensors: A systematic review. Z. Gerontol. Geriatr. 2013, 46, 706–719. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.S.; Hoey, J. Review of fall detection techniques: A data availability perspective. Med. Eng. Phys. 2017, 39, 12–22. [Google Scholar] [CrossRef] [PubMed]
- Klenk, J.; Schwickert, L.; Palmerini, L.; Mellone, S.; Bourke, A.; Ihlen, E.; Kerse, N.; Hauer, K.; Pijnappels, M.; Synofzik, M.; et al. The farseeing real-world fall repository: A large-scale collaborative database to collect and share sensor signals from real-world falls. Eur. Rev. Aging Phys. Activity 2016, 13, 8. [Google Scholar] [CrossRef]
- Klenk, J.; Becker, C.; Lieken, F.; Nicolai, S.; Maetzler, W.; Alt, W.; Zijlstra, W.; Hausdorff, J.M.; van Lummel, R.C.; Chiari, L.; et al. Comparison of acceleration signals of simulated and real-world backward falls. Med. Eng. Phys. 2011, 33, 368–373. [Google Scholar] [CrossRef]
- Kangas, M.; Vikman, I.; Nyberg, L.; Korpelainen, R.; Lindblom, J.; Jms, T. Comparison of real-life accidental falls in older people with experimental falls in middle-aged test subjects. Gait Posture 2012, 35, 500–505. [Google Scholar] [CrossRef]
- Silva, J.; Sousa, I.; Cardoso, J. Transfer learning approach for fall detection with the FARSEEING real-world dataset and simulated falls. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 17–21 July 2018; pp. 3509–3512. [Google Scholar] [CrossRef]
- Kangas, M.; Vikman, I.; Wiklander, J.; Lindgren, P.; Nyberg, L.; Jämsä, T. Sensitivity and specificity of fall detection in people aged 40 years and over. Gait Posture 2009, 29, 571–574. [Google Scholar] [CrossRef]
- Pannurat, N.; Thiemjarus, S.; Nantajeewarawat, E. A Hybrid Temporal Reasoning Framework for Fall Monitoring. IEEE Sens. J. 2017, 17, 1749–1759. [Google Scholar] [CrossRef]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. Real-Life/Real-Time Elderly Fall Detection with a Triaxial Accelerometer. Sensors 2018, 18, 1101. [Google Scholar] [CrossRef]
- Özdemir, A.T.; Barshan, B. Detecting falls with wearable sensors using machine learning techniques. Sensors 2014, 14, 10691–10708. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Stankovic, J.; Hanson, M.; Barth, A.T.; Lach, J.; Zhou, G. Accurate, fast fall detection using gyroscopes and accelerometer-derived posture information. In Proceedings of the IEEE 6th International Workshop on Wearable and Implantable Body Sensor Networks, Berkerey, CA, USA, 3–5 June 2009; pp. 138–143. [Google Scholar] [CrossRef]
- Huynh, Q.T.; Nguyen, U.D.; Irazabal, L.B.; Ghassemian, N.; Tran, B.Q. Optimization of an Accelerometer and Gyroscope-Based Fall Detection Algorithm. J. Sens. 2015, 2015, 452078. [Google Scholar] [CrossRef]
- Wang, C.; Lu, W.; Narayanan, M.R.; Chang, D.C.W.; Lord, S.R.; Redmond, S.J.; Lovell, N.H. Low-Power Fall Detector Using Triaxial Accelerometry and Barometric Pressure Sensing. IEEE Trans. Ind. Inform. 2016, 12, 2302–2311. [Google Scholar] [CrossRef]
- Bourke, A.; van de Ven, P.; Gamble, M.; O’Connor, R.; Murphy, K.; Bogan, E.; McQuade, E.; Finucane, P.; Olaighin, G.; Nelson, J. Evaluation of waist-mounted tri-axial accelerometer based fall-detection algorithms during scripted and continuous unscripted activities. J. Biomech. 2010, 43, 3051–3057. [Google Scholar] [CrossRef]
- Özdemir, A.T. An analysis on sensor locations of the human body for wearable fall detection devices: Principles and practice. Sensors 2016, 16, 1161. [Google Scholar] [CrossRef]
- Kangas, M.; Konttila, A.; Lindgren, P.; Winblad, I.; Jämsaä, T. Comparison of low-complexity fall detection algorithms for body attached accelerometers. Gait Posture 2008, 28, 285–291. [Google Scholar] [CrossRef]
- Gjoreski, H.; Lustrek, M.; Gams, M. Accelerometer Placement for Posture Recognition and Fall Detection. In Proceedings of the Seventh International Conference on Intelligent Environments, Nottingham, UK, 25–28 July 2011; pp. 47–54. [Google Scholar] [CrossRef]
- ARM. CMSIS DSP Software Library. 2015. Available online: http://www.keil.com/pack/doc/CMSIS/DSP/html/index.html (accessed on 11 October 2018).
- Pontius, R.; Si, R. The total operating characteristic to measure diagnostic ability for multiple thresholds. Int. J. Geogr. Inform. Sci. 2014, 28, 570–583. [Google Scholar] [CrossRef]
- Gao, L.; Bourke, A.K.; Nelson, J. Evaluation of accelerometer based multi-sensor versus single-sensor activity recognition systems. Med. Eng. Phys. 2014, 36, 779–785. [Google Scholar] [CrossRef] [PubMed]
- Bagalá, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of Accelerometer-Based Fall Detection Algorithms on Real-World Falls. PLoS ONE 2012, 7, e37062. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
| Non-Fall Movements | Samples |
|---|---|
| While seated slowly drop sensor on the table | 99 |
| While seated quickly drop sensor on the table | 68 |
| While standing quickly drop sensor on the table | 73 |
| While standing slowly drop sensor on the table | 82 |
| Stumble | 67 |
| Sit on a lower chair, wait 10 s and get up | 63 |
| Left lateral fall with recovery | 67 |
| Walking and sitting on a chair | 65 |
| Lay, wait 10 s, stand, wait 10 s | 70 |
| Forward Fall with recovery | 67 |
| Backward fall with recovery | 67 |
| Catch an object from the floor while walking | 67 |
| Walk a few meters | 68 |
| Cough and sneeze | 67 |
| Sit, wait 10 s, stand, wait 10 s | 70 |
| Run a few meters | 67 |
| Right lateral fall with recovery | 66 |
| While seated slightly lift the body | 31 |
| Sitting on a chair | 34 |
| Laying on a bed | 31 |
| Bend and pick an object from the floor | 18 |
| Get up from laying and stand | 59 |
| Get up from laying and sit | 30 |
| Walk | 3 |
| Total | 1399 |
| Fall Movements | |
| Sited on a chair, stand up, walk and fall | 64 |
| Backward fall ending lying | 70 |
| Forward fall with rotation, ending in lateral left position | 67 |
| Backward fall ending sitting | 67 |
| Forward fall with rotation, ending in lateral right position | 67 |
| Walk few meters and then right lateral fall | 67 |
| Lateral fall to the left ending lying flat | 67 |
| Lateral fall to the right ending lying flat | 67 |
| Backward fall ending in lateral position | 66 |
| Walk few meters and fall backwards | 66 |
| Walk few meters and left lateral falls | 67 |
| Forward fall on the knees | 70 |
| Forward fall ending lying flat | 67 |
| Forward fall with forward arm protection | 70 |
| Walk few meters and fall forward | 67 |
| Total | 1009 |
| Sensitivity | High | Medium | Low | |||
|---|---|---|---|---|---|---|
| Frequency (Hz) | 100 | 50 | 100 | 50 | 100 | 50 |
| Sensitivity (%) | 96.4 | 98.3 | 95.0 | 96.7 | 89.4 | 93.0 |
| Specificity (%) | 92.8 | 94.5 | 94.4 | 96.4 | 97.3 | 97.4 |
| J index (%) | 89.2 | 92.8 | 89.4 | 93.1 | 86.7 | 90.4 |
| Non-Fall Movements | Samples | Pred Fall | Pred Non Fall | Acc (%) |
|---|---|---|---|---|
| While seated slowly drop sensor on the table | 99 | 5 | 94 | 94.9 |
| While seated quickly drop sensor on the table | 68 | 17 | 51 | 75.0 |
| While standing quickly drop sensor on the table | 73 | 33 | 40 | 54.8 |
| While standing slowly drop sensor on the table | 82 | 1 | 81 | 98.8 |
| Stumble | 67 | 0 | 67 | 100 |
| Sit on a lower chair, wait 10 s and get up | 63 | 0 | 63 | 100 |
| Left lateral fall with recovery | 67 | 1 | 66 | 98.5 |
| Walking and sitting on a chair | 65 | 0 | 65 | 100 |
| Lay, wait 10 s, stand, wait 10 s | 70 | 2 | 68 | 97.1 |
| Forward Fall with recovery | 67 | 0 | 67 | 100 |
| Backward fall with recovery | 67 | 0 | 67 | 100 |
| Catch an object from the floor while walking | 67 | 0 | 67 | 100 |
| Walk a few meters | 68 | 0 | 67 | 100 |
| Cough and sneeze | 67 | 0 | 67 | 100 |
| Sit, wait 10 s, stand, wait 10 s | 70 | 0 | 70 | 100 |
| Run a few meters | 67 | 1 | 66 | 98.5 |
| Right lateral fall with recovery | 66 | 0 | 66 | 100 |
| While seated slightly lift the body | 31 | 0 | 31 | 100 |
| Sitting on a chair | 34 | 0 | 34 | 100 |
| Laying on a bed | 31 | 0 | 31 | 100 |
| Bend and pick an object from the floor | 18 | 0 | 18 | 100 |
| Get up from laying and stand | 59 | 0 | 59 | 100 |
| Get up from laying and sit | 30 | 0 | 30 | 100 |
| Walk | 3 | 0 | 3 | 100 |
| Total | 1399 | 60 | 1339 | 95.7 |
| Fall Movements | ||||
| Sited on a chair, stand up, walk and fall | 64 | 56 | 8 | 87.5 |
| Backward fall ending lying | 70 | 70 | 0 | 100 |
| Forward fall with rotation, ending in lateral left position | 67 | 65 | 2 | 97.0 |
| Backward fall ending sitting | 67 | 61 | 6 | 91.0 |
| Forward fall with rotation, ending in lateral right position | 67 | 63 | 4 | 94.0 |
| Walk few meters and then right lateral fall | 67 | 67 | 0 | 100 |
| Lateral fall to the left ending lying flat | 67 | 65 | 2 | 97.0 |
| Lateral fall to the right ending lying flat | 67 | 64 | 3 | 95.6 |
| Backward fall ending in lateral position | 66 | 66 | 0 | 100 |
| Walk few meters and fall backwards | 66 | 66 | 0 | 100 |
| Walk few meters and left lateral falls | 67 | 62 | 5 | 92.5 |
| Forward fall on the knees | 70 | 70 | 0 | 100 |
| Forward fall ending lying flat | 67 | 62 | 5 | 95.5 |
| Forward fall with forward arm protection | 70 | 70 | 0 | 100 |
| Walk few meters and fall forward | 67 | 63 | 4 | 94.0 |
| Total | 1009 | 970 | 39 | 96.1 |
| Sensitivity Levels | High | Medium | Low | |||
|---|---|---|---|---|---|---|
| Amount of data | 44.67 h | |||||
| Number of falls | 272 | |||||
| (Hz) | 100 | 50 | 100 | 50 | 100 | 50 |
| True Positives | 259 | 243 | 228 | 236 | 231 | 220 |
| False Alarms | 24 | 16 | 6 | 5 | 6 | 1 |
| Sensitivity % | 95.2 | 89.3 | 83.8 | 85.6 | 84.9 | 80.9 |
| Precision % | 91.5 | 93.8 | 97.5 | 97.5 | 97.5 | 99.5 |
| F-score % | 93.3 | 91.5 | 90.1 | 91.8 | 90.8 | 89.3 |
| FA per day | 8.9 | 5.9 | 2.1 | 1.9 | 2.1 | 0.4 |
| Sensitivity Level | High | Medium | Low | ||||
|---|---|---|---|---|---|---|---|
| (Hz) | 100 | 50 | 100 | 50 | 100 | 50 | |
| Chest | TP | 67 | 66 | 68 | 64 | 63 | 63 |
| Sens (%) | 88.2 | 86.8 | 89.4 | 84.2 | 82.9 | 82.9 | |
| FA | 1 | 1 | 1 | 0 | 0 | 0 | |
| TP | 120 | 108 | 98 | 101 | 104 | 96 | |
| Sens (%) | 100.0 | 90.0 | 81.7 | 84.2 | 86.7 | 80.0 | |
| FA | 20 | 12 | 0 | 5 | 6 | 0 | |
| Waist | TP | 72 | 69 | 62 | 68 | 64 | 61 |
| Sens (%) | 94.7 | 90.8 | 81.6 | 89.5 | 84.2 | 80.3 | |
| FA | 3 | 3 | 5 | 0 | 0 | 1 | |
| Work | Algorithm | (Hz) | Adjustable Position/Multiple Position Train | Adjustable Performance | Results (%) |
|---|---|---|---|---|---|
| Our work | SM | 100 or 50 | Yes/Yes | Yes | Sens 96.7 Spec 96.4 |
| Kangas et al. 2008 [26] | TB | 50 | No/Yes | No | Sens 97.0 Spec 100.0 |
| Gjoreski et al. 2011 [27] | ML + TB | 6 | No/Yes | No | Acc 71.0 #FA 5 |
| Wang et al. 2016 [23] | TB | 6 or 50 | No/No | No | Sens 93 Spec 87 |
| Pannurat et al. 2017 [18] | RB + ADL Classification | 15 | Yes/Yes | No | Sens 93.6 Spec 88.3 |
| Sucerquia et al. 2018 [19] | Kalman filter + TB | 25 | No/No | No | Sens 99.3 Spec 99.4 |
| Özdemir et al. 2014 [20] | ML | 25 | No/Yes | No | Sens 100.0 Spec 99.8 |
| Özdemir 2016 [25] | ML | 25 | No/Yes | No | Acc 99.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alves, J.; Silva, J.; Grifo, E.; Resende, C.; Sousa, I. Wearable Embedded Intelligence for Detection of Falls Independently of on-Body Location. Sensors 2019, 19, 2426. https://doi.org/10.3390/s19112426
Alves J, Silva J, Grifo E, Resende C, Sousa I. Wearable Embedded Intelligence for Detection of Falls Independently of on-Body Location. Sensors. 2019; 19(11):2426. https://doi.org/10.3390/s19112426
Chicago/Turabian StyleAlves, José, Joana Silva, Eduardo Grifo, Carlos Resende, and Inês Sousa. 2019. "Wearable Embedded Intelligence for Detection of Falls Independently of on-Body Location" Sensors 19, no. 11: 2426. https://doi.org/10.3390/s19112426
APA StyleAlves, J., Silva, J., Grifo, E., Resende, C., & Sousa, I. (2019). Wearable Embedded Intelligence for Detection of Falls Independently of on-Body Location. Sensors, 19(11), 2426. https://doi.org/10.3390/s19112426