A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance


Abstract
1. Introduction
2. Problem Description and Formulation
2.1. Kinematics Model
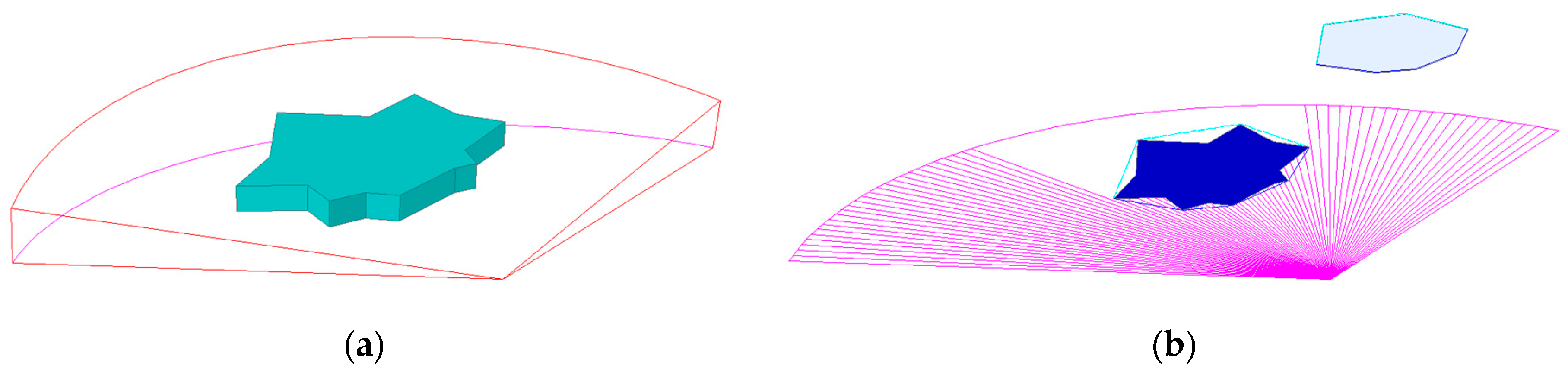
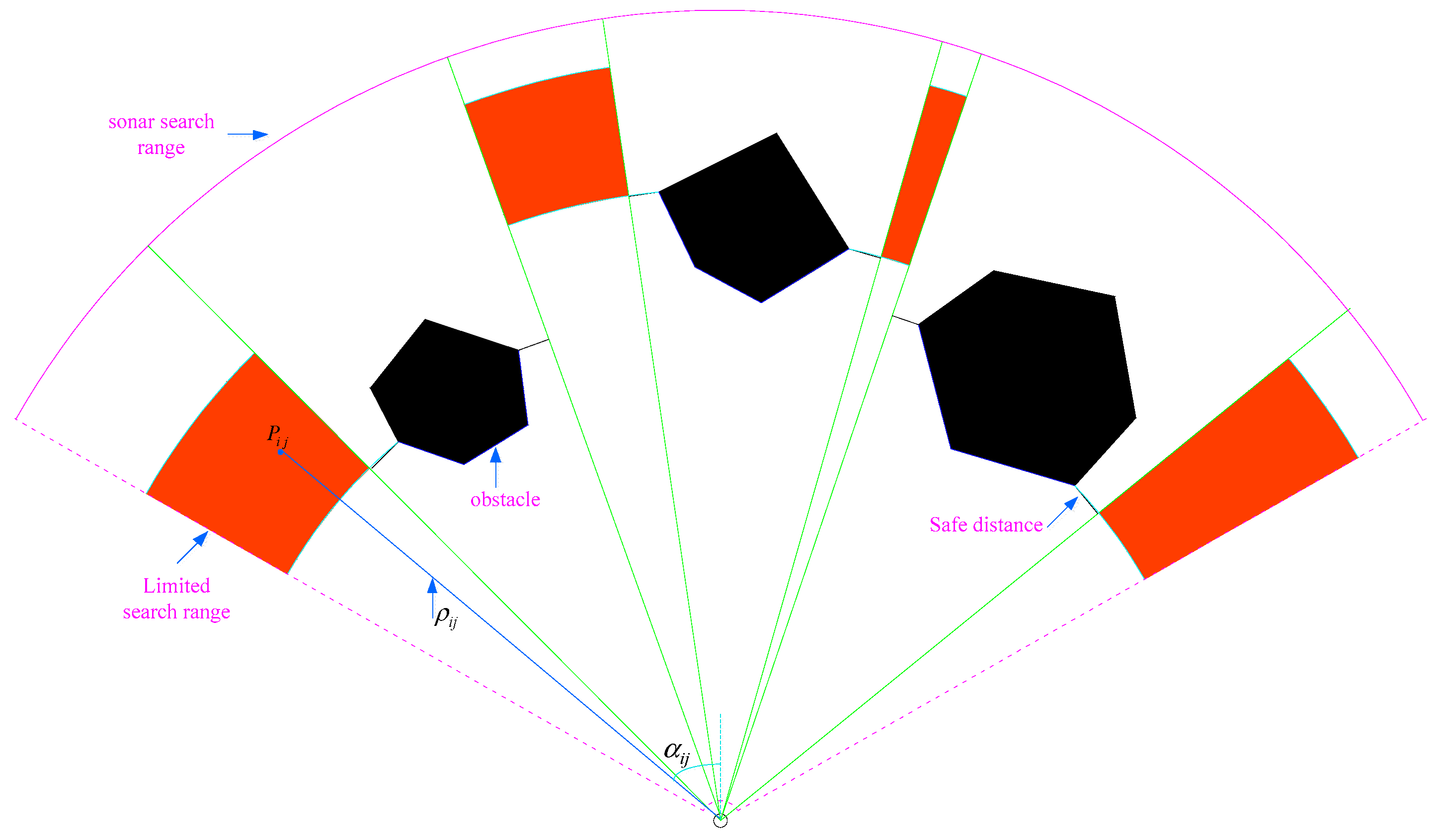
2.2. Sonar Model
3. Hybrid Path Planning Algorithm Based on PSO and Waypoint Guidance
3.1. Particle Swarm Optimization
3.2. Hybrid Path Planning Algorithm
3.3. Planar Path Planning
4. Simulation Results
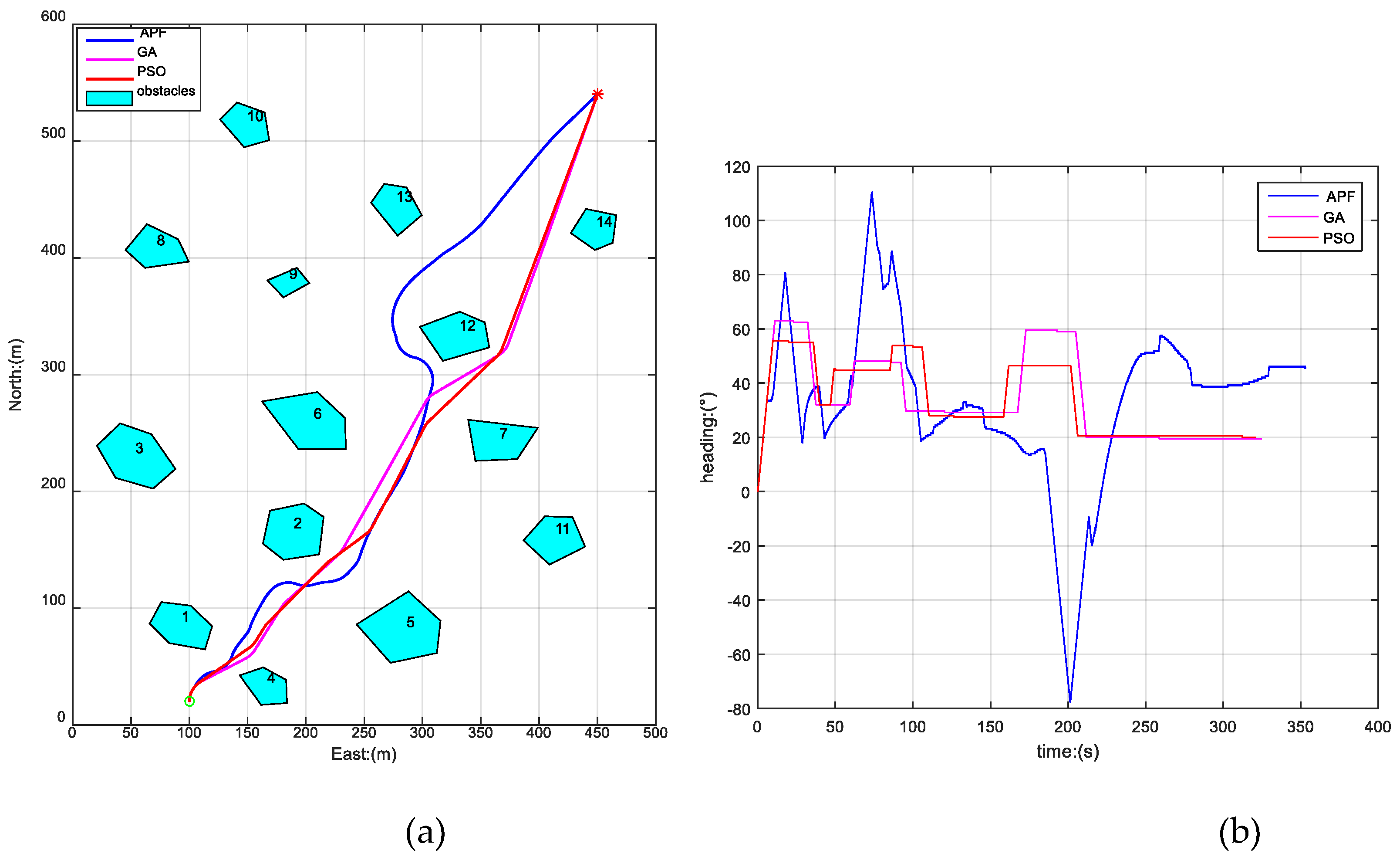
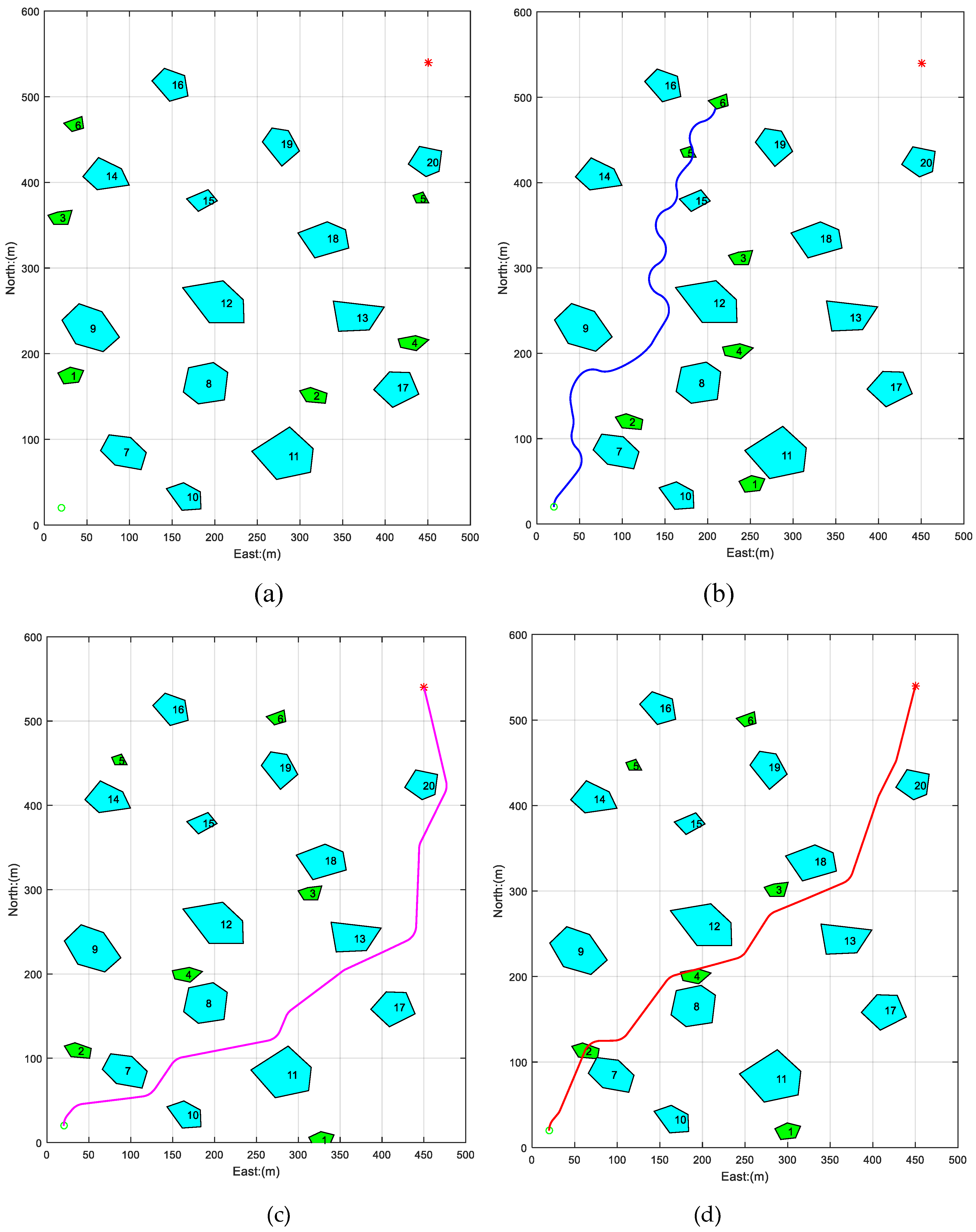
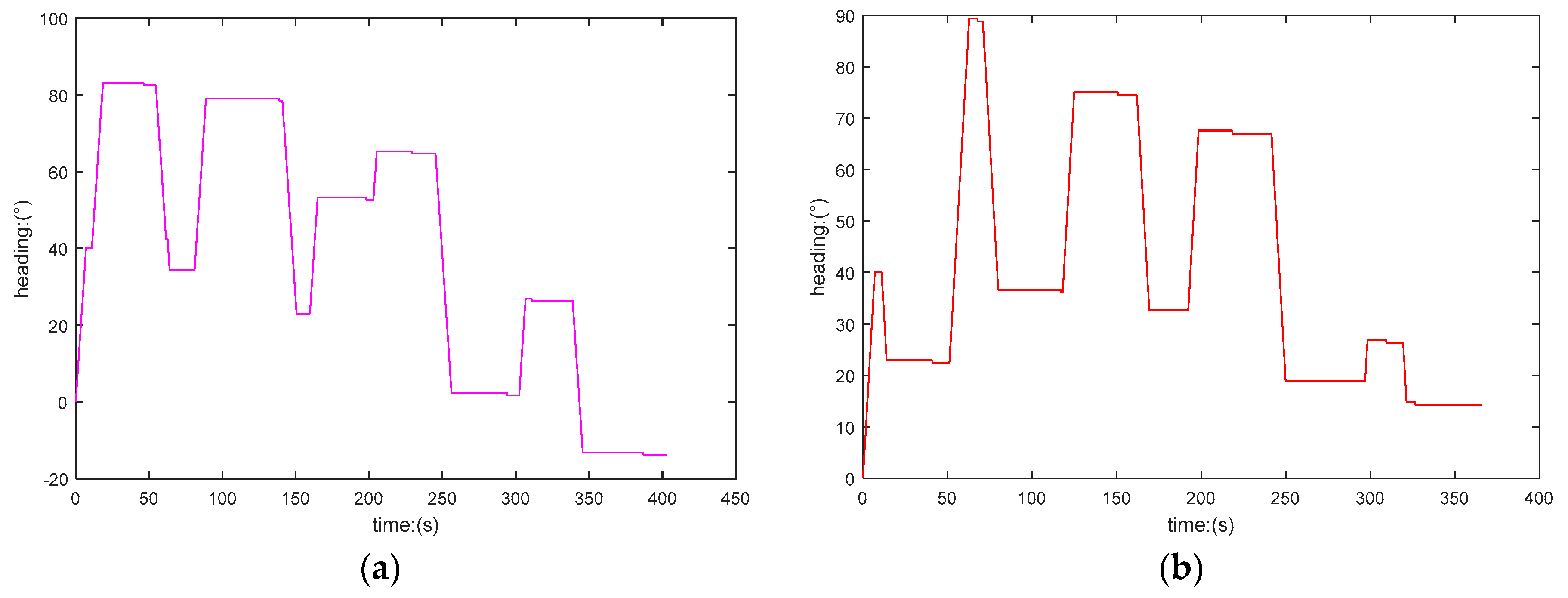
4.1. Static Environment Path Planning
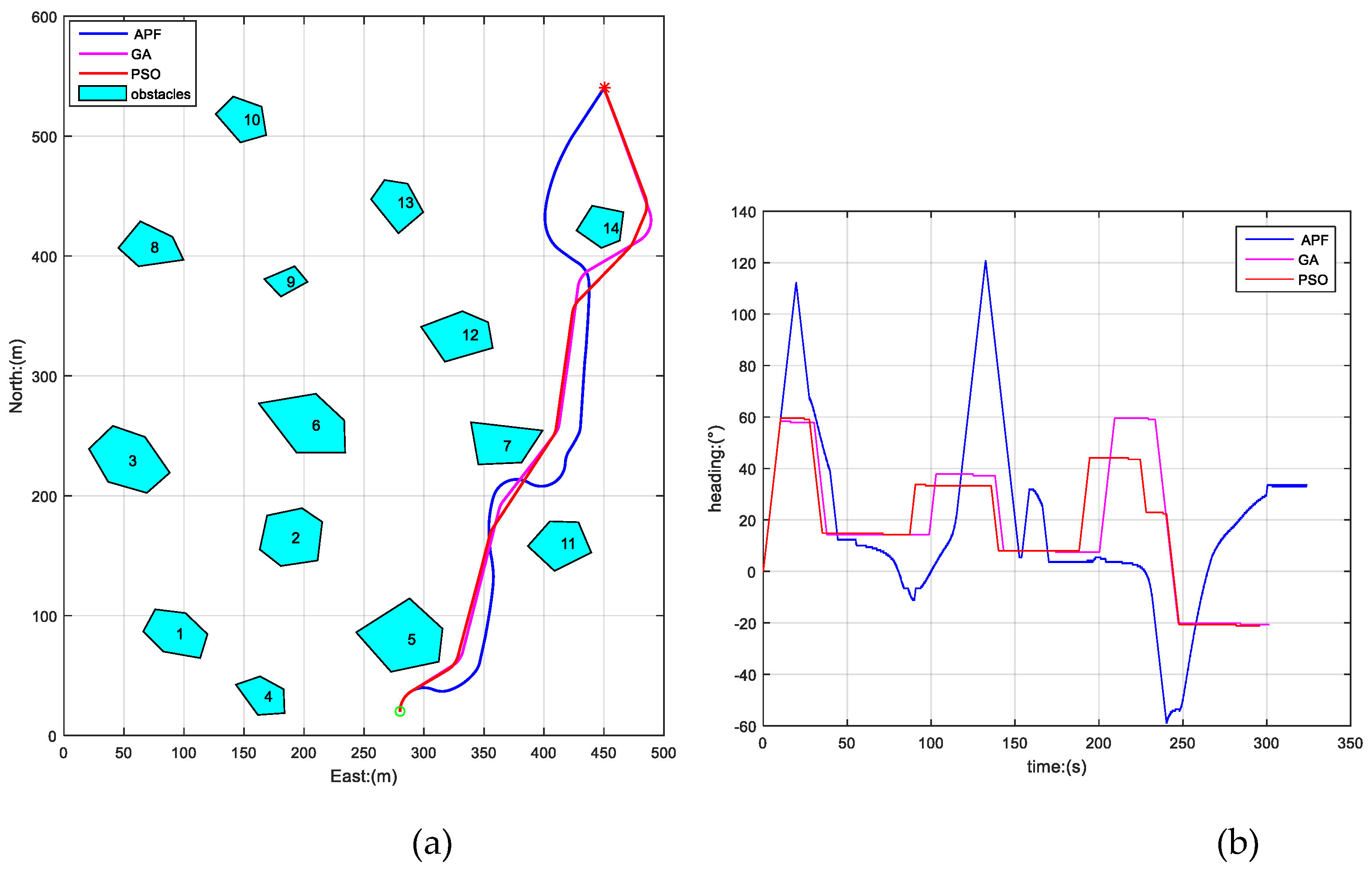
4.2. Dynamic Environment Path Planning
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Golikov, S.Y.; Dulepov, V.I.; Maiorov, I.S. Application of TSL Underwater Robots (AUV) for Investigation of Benthic Ecosystems and Quantification of Benthic Invertebrate Reserves. In Proceedings of the International Conference on Construction, Architecture and Technosphere Safety (ICCATS 2017), Chelyabinsk, Russia, 21–22 September 2017; Volume 262. [Google Scholar]
- Guo, J.; He, B.; Sha, Q.X. Shallow-sea application of an intelligent fusion module for low-cost sensors in AUV. Ocean Eng. 2018, 148, 386–400. [Google Scholar] [CrossRef]
- Okamoto, A.; Tamura, K.; Sasano, M.; Sawada, K.; Seta, T.; Inaba, S. Development of Hovering-type AUV “HOBALIN” for Exploring Seafloor Hydrothermal Deposits. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Petillo, S.; Schmidt, H. Exploiting Adaptive and Collaborative AUV Autonomy for Detection and Characterization of Internal Waves. IEEE J. Ocean. Eng. 2014, 39, 150–164. [Google Scholar] [CrossRef]
- Khachiyan, L.; Gurvich, V.; Zhao, J.H. Extending Dijkstra’s algorithm to maximize the shortest path by node-wise limited arc interdiction. Comput. Sci. Theory Appl. 2006, 3967, 221–234. [Google Scholar]
- Ammar, A.; Bennaceur, H.; Châari, I.; Koubâa, A.; Alajlan, M. Relaxed Dijkstra and A * with linear complexity for robot path planning problems in large-scale grid environments. Soft Comput. 2016, 20, 4149–4171. [Google Scholar] [CrossRef]
- Wang, S.F.; Zhang, J.X.; Zhang, J.Y. Artificial potential field algorithm for path control of unmanned ground vehicles formation in highway. Electron. Lett. 2018, 54, 1166–1167. [Google Scholar] [CrossRef]
- Prats, X.; Santamaria, E.; Delgado, L.; Trillo, N.; Pastor, E. Enabling leg-based guidance on top of waypoint-based autopilots for UAS. Aerosp. Sci. Technol. 2013, 24, 95–100. [Google Scholar] [CrossRef]
- Ataei, M.; AYousefi-Koma, A. Three-dimensional optimal path planning for waypoint guidance of an autonomous underwater vehicle. Robot. Autom. Syst. 2015, 67, 23–32. [Google Scholar] [CrossRef]
- Tian, W.J.; Zhou, H.; Gao, M.J. A path planning algorithm for mobile robot based on combined fuzzy and Artificial Potential Field. In Advanced Computer Technology, New Education, Proceedings; Xiamen Univ Press: Wuhan, China, 2007; pp. 55–58. [Google Scholar]
- Feng, P. The Research of Dynamic Path Planning Based on Improving Fuzzy Genetic Algorithm in the Vehicle Navigation. In Advanced Research on Engineering Materials, Energy, Management and Control, Pts 1 and 2; Trans Tech Publications Ltd.: Wuhan, China, 2012; Volume 424–425, pp. 73–76. [Google Scholar]
- Sun, Y.; Zhang, R.B. Research on Global Path Planning for AUV Based on GA. Mech. Eng. Technol. 2012, 125, 311–318. [Google Scholar]
- Cai, L.; Jia, J.P. Path Planning with PSO for Autonomous Vehicle; Crc Press-Taylor & Francis Group: Wuhan, China, 2016; pp. 263–266. [Google Scholar]
- Das, P.K.; Behera, H.S.; Das, S. A hybrid improved PSO-DV algorithm for multi-robot path planning in a clutter environment. Neurocomputing 2016, 207, 735–753. [Google Scholar] [CrossRef]
- Soltani, A.R.; Tawfik, H.; Goulermas, J.Y.; Fernando, T. Path planning in construction sites: Performance evaluation of the Dijkstra, A *, and GA search algorithms. Adv. Eng. Inform. 2002, 16, 291–303. [Google Scholar] [CrossRef]
- Tsardoulias, E.G.; Iliakopoulou, A.; Kargakos, A. A Review of Global Path Planning Methods for Occupancy Grid Maps Regardless of Obstacle Density. J. Intell. Robot. Syst. 2016, 84, 829–858. [Google Scholar] [CrossRef]
- Sheng, W.J.; He, G.Q.; Guo, W.B. An Improved Artificial Potential Field Algorithm for Virtual Human Path Planning. Entertain. Educ. Digit. Tech. Syst. 2010, 6249, 592–601. [Google Scholar]
- Fayad, C.; Webb, P. Development of a hybrid crisp-fuzzy logic algorithm optimised by genetic algorithms for path-planning of an autonomous mobile robot. J. Intell. Fuzzy Syst. 2006, 17, 15–26. [Google Scholar]
- Geng, N.; Gong, D.W.; Zhang, Y. PSO-Based Robot Path Planning for Multisurvivor Rescue in Limited Survival Time. Math. Probl. Eng. 2014, 2014, 187370. [Google Scholar] [CrossRef]
- Li, P.; Huang, X.H.; Wang, M. A novel hybrid method for mobile robot path planning in unknown dynamic environment based on hybrid DSm model grid map. J. Exp. Theor. Artif. Intell. 2011, 23, 5–22. [Google Scholar] [CrossRef]
- Tanakitkorn, K.; Wilson, P.A.; Turnock, S.R.; Phillips, A.B. Grid-Based GA Path Planning with Improved Cost Function for an Over-actuated Hover-Capable AUV. In Proceedings of the 2014 IEEE/OES Autonomous Underwater Vehicles (AUV), Oxford, MS, USA, 6–9 October 2014. [Google Scholar]
- Li, I.H.; YChien, H.; Wang, W.Y.; Kao, Y.-F. Hybrid Intelligent Algorithm for Indoor Path Planning and Trajectory-Tracking Control of Wheeled Mobile Robot. Int. J. Fuzzy Syst. 2016, 18, 595–608. [Google Scholar] [CrossRef]
- Pothal, K.J.; Parhi, D.R. Navigation of multiple mobile robots in a highly clutter terrains using adaptive neuro-fuzzy inference system. Robot. Autom. Syst. 2015, 72, 48–58. [Google Scholar] [CrossRef]
- Gonzalez, D.; Perez, J.; Milanes, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Hoshino, Y.; Peng, C.-C. Path Smoothing Techniques in Robot. Navigation: State-of-the-Art, Current and Future Challenges. Sensors 2018, 18, 3170. [Google Scholar]
- Yao, H.D.; Cui, J.X.; Li, X.P.; Wang, Y.; An, S. A trajectory smoothing method at signalized intersection based on individualized variable speed limits with location optimization. Transp. Res. Part D Transp. Environ. 2018, 62, 456–473. [Google Scholar] [CrossRef]
- Fossen, I.T.; Sagatun, S.I. Adaptive Control of Nonlinear Systems: A Case Study of Underwater Robotic Systems. J. Robot. Syst. 1991, 8, 393–412. [Google Scholar] [CrossRef]
- Yan, P.Z.; Li, J.Y.; Zhang, G.S.; Wu, Y. A Real-Time Reaction Obstacle Avoidance Algorithm for Autonomous Underwater Vehicles in Unknown Environments. Sensors 2018, 18, 438. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| APF | GA | PSO | ||||
|---|---|---|---|---|---|---|
| P.L.: m | T.C.: s | P.L.: m | T.C.: s | P.L.: m | T.C.: s | |
| 1 | 753.4 | 376.7 | 706.2 | 353.1 | 647.8 | 323.9 |
| 2 | 732.8 | 366.4 | 649.8 | 301.5 | 603.0 | 301.5 |
| 3 | 718.4 | 359.2 | 642.8 | 321.4 | 592.0 | 296.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Z.; Li, J.; Wu, Y.; Zhang, G. A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance. Sensors 2019, 19, 20. https://doi.org/10.3390/s19010020
Yan Z, Li J, Wu Y, Zhang G. A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance. Sensors. 2019; 19(1):20. https://doi.org/10.3390/s19010020
Chicago/Turabian StyleYan, Zheping, Jiyun Li, Yi Wu, and Gengshi Zhang. 2019. "A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance" Sensors 19, no. 1: 20. https://doi.org/10.3390/s19010020
APA StyleYan, Z., Li, J., Wu, Y., & Zhang, G. (2019). A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance. Sensors, 19(1), 20. https://doi.org/10.3390/s19010020