Evaluation of a Piezo-Actuated Sensor for Monitoring Elastic Variations of Its Support with Impedance-Based Measurements

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
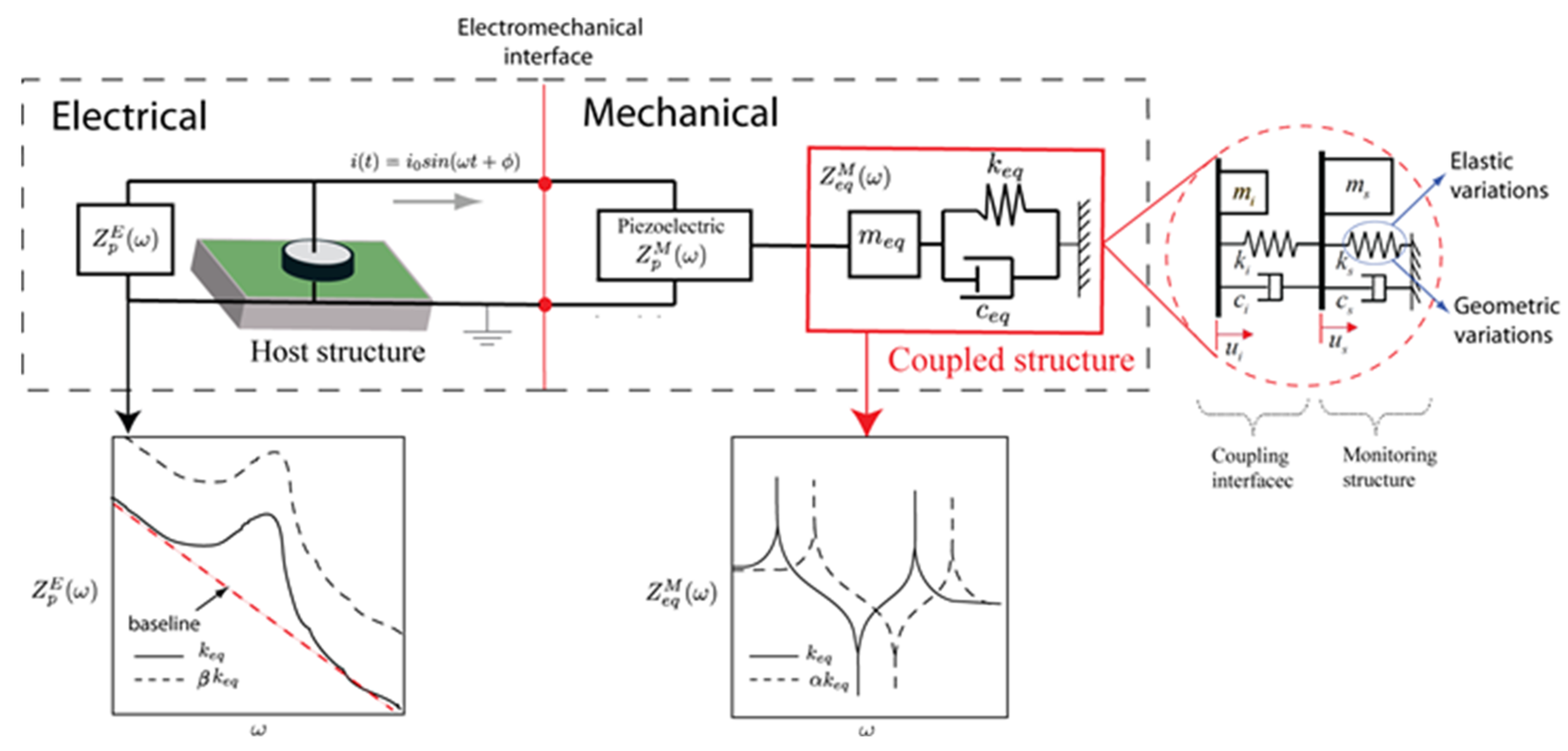
2.1. Electromechanical Impedance Technique (EMI) Principles
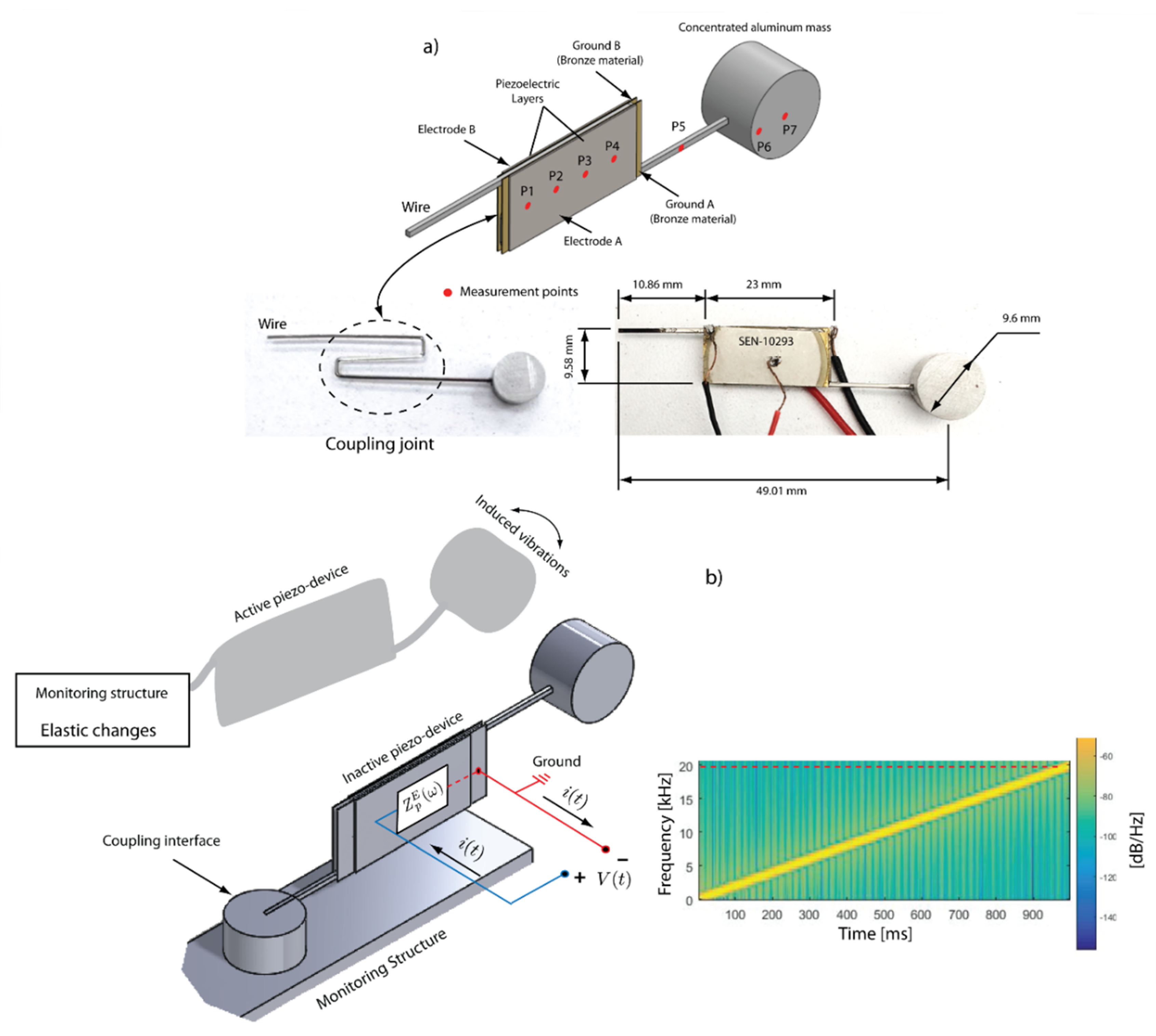
2.2. Working Principles of the Piezo-Actuated Sensor
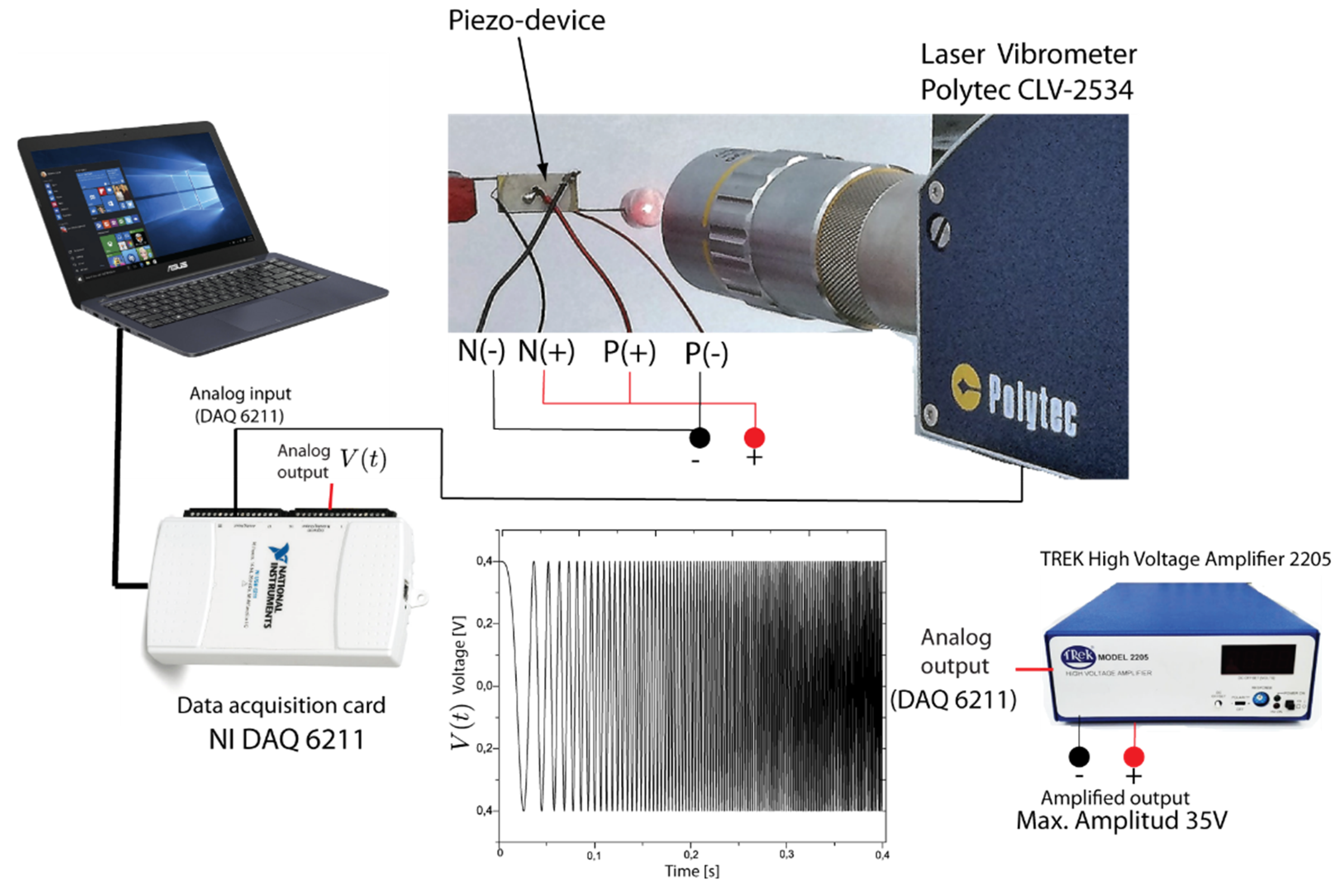
2.3. Velocity Measurements of the Piezo-Actuated Sensor
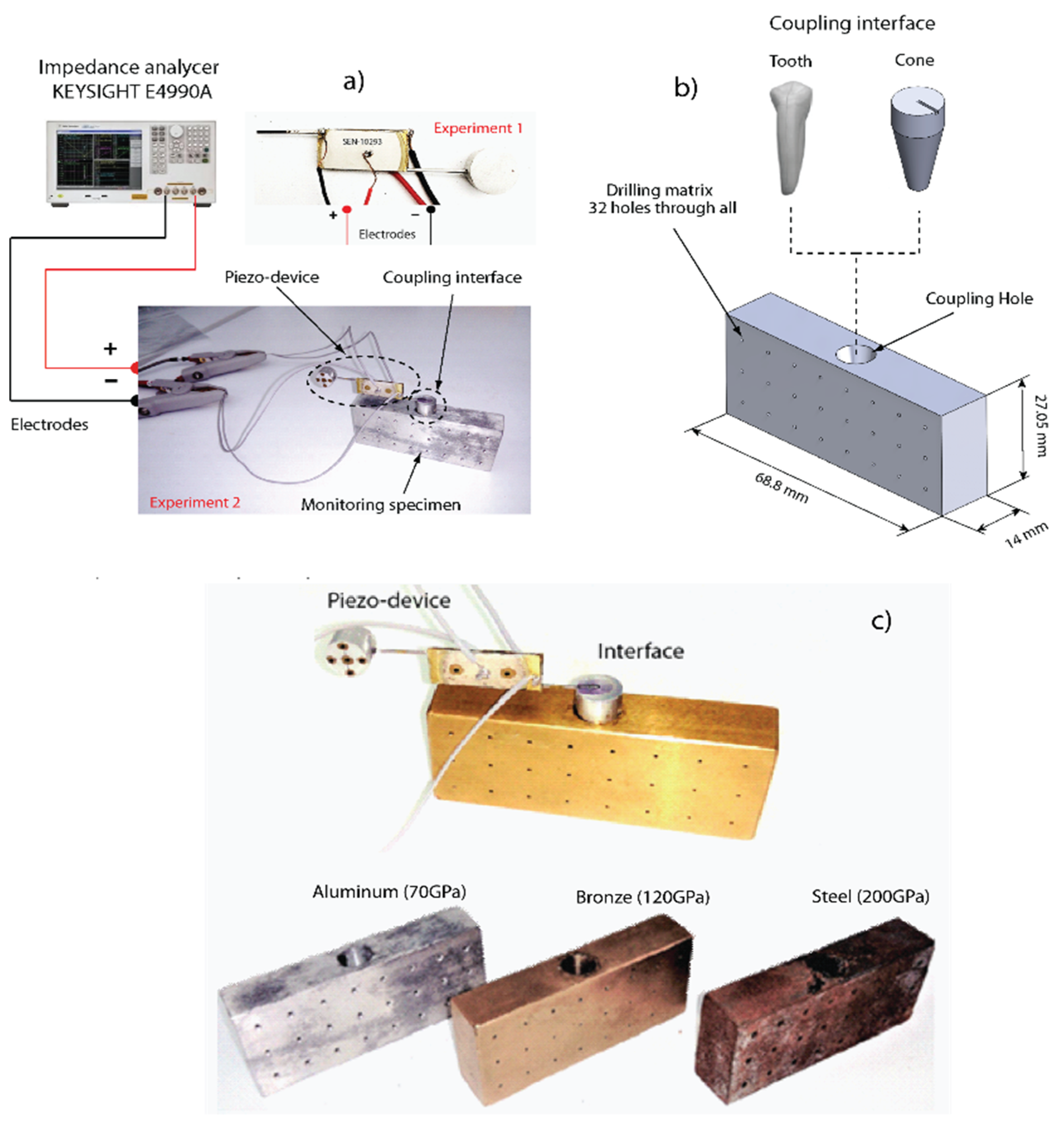
2.4. Experimental Setup for Structural Monitoring with the EMI Technique
3. Results and Discussion
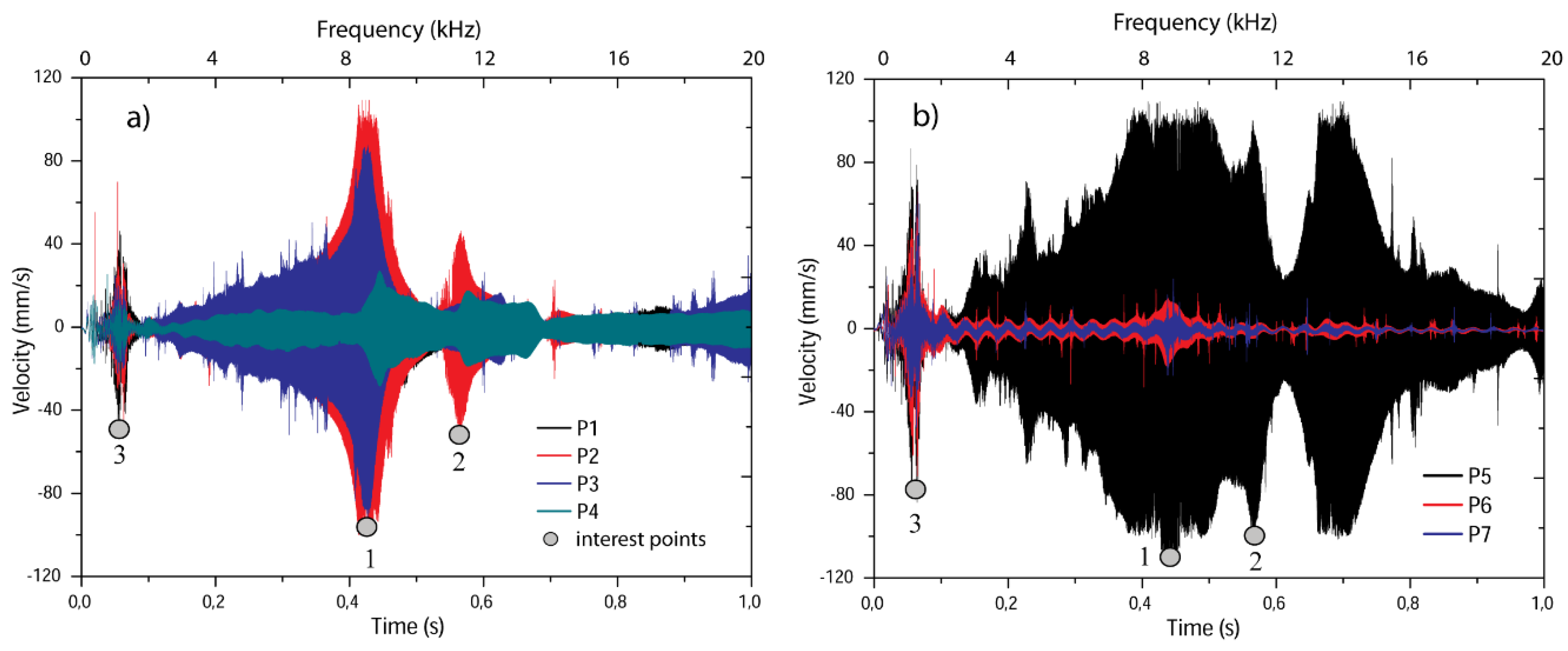
3.1. Velocity Measurements in the Piezo-Device
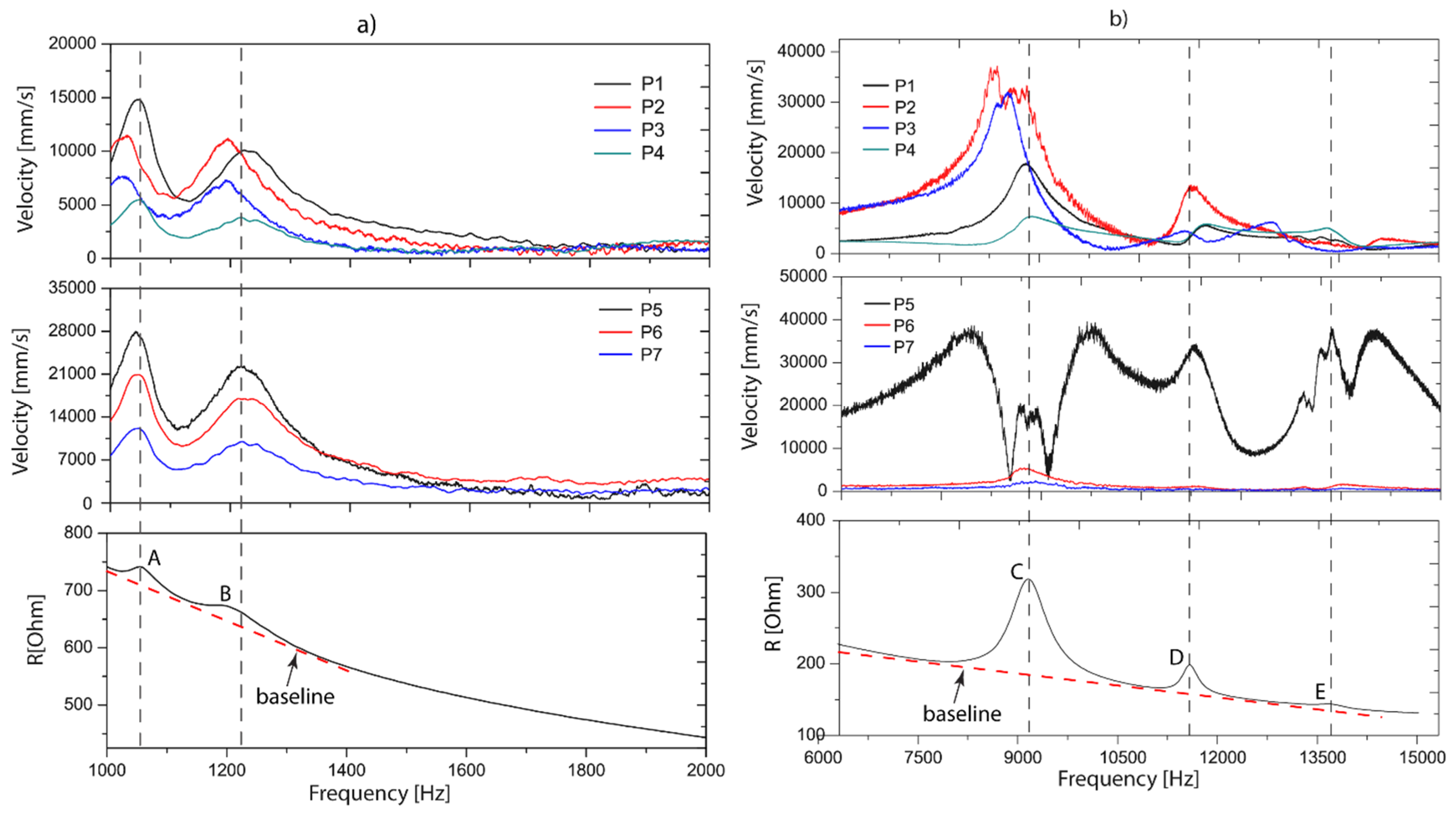
3.2. Comparison between Velocity and Electrical Impedance Measurements
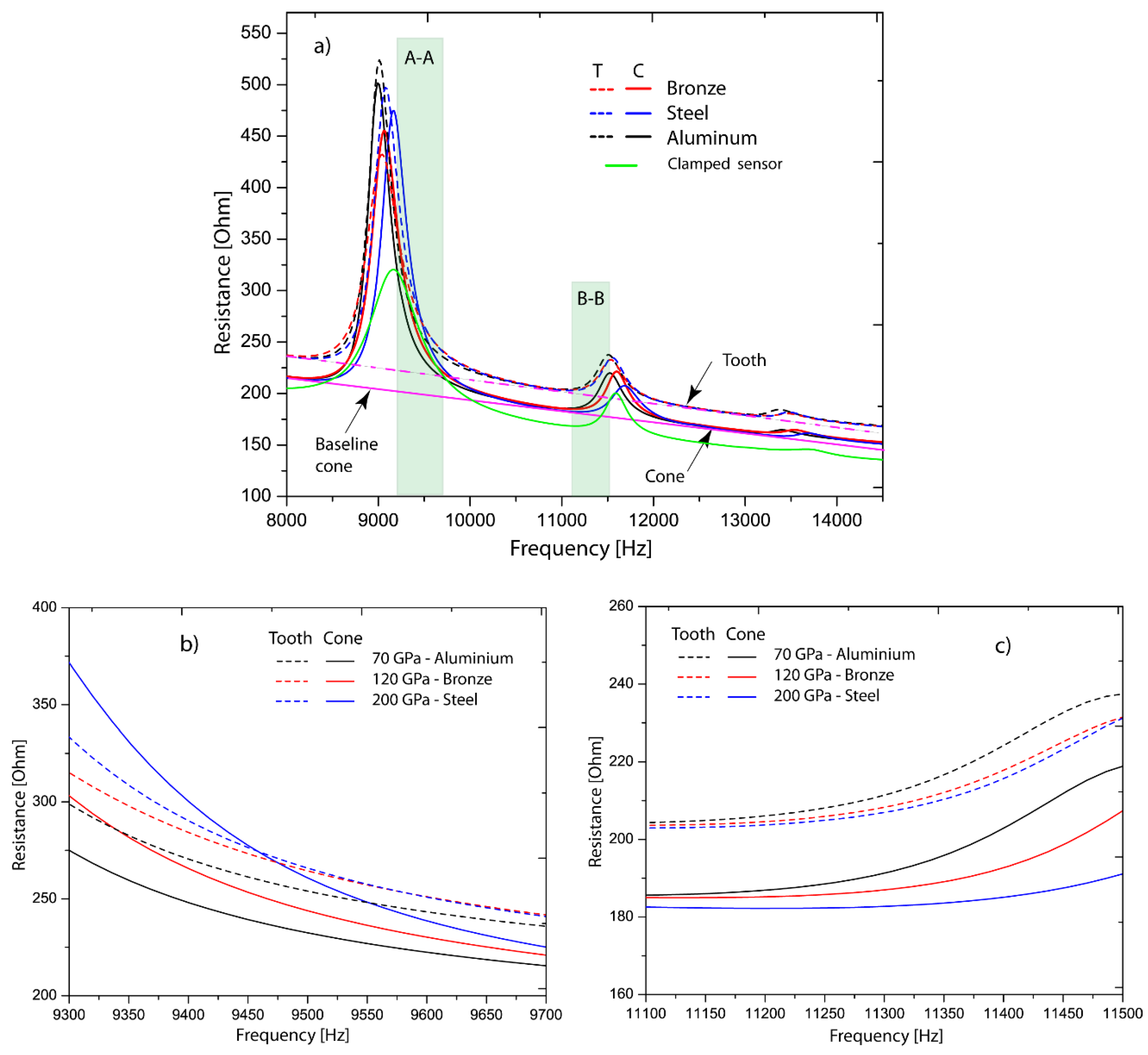
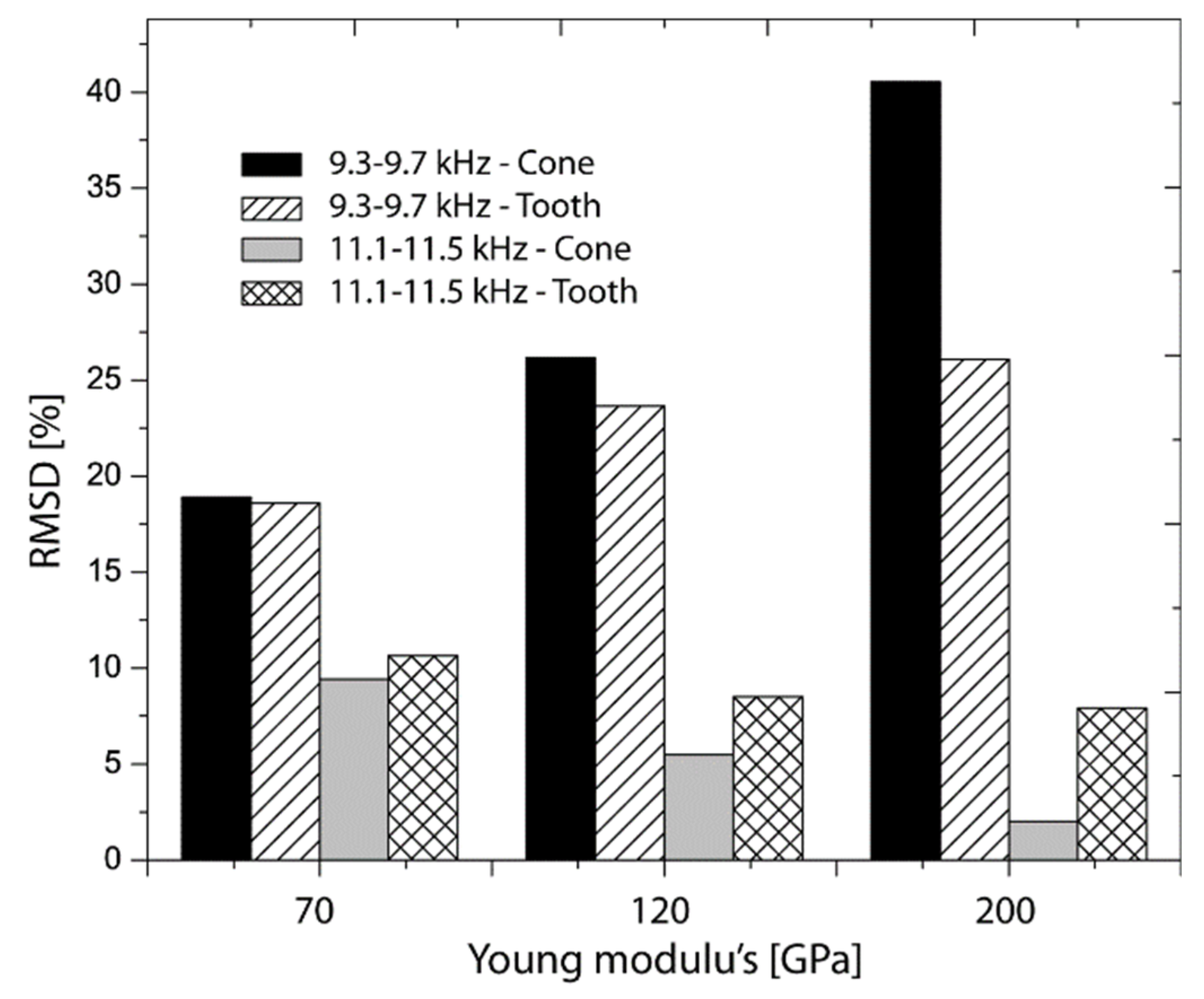
3.3. Assessment of Young’s Modulus Variation in the Monitoring Structure
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, H.N.; Ren, L.; Jia, Z.G.; Yi, T.H.; Li, D.S. State-of-the-art in structural health monitoring of large and complex civil infrastructures. J. Civ. Struct. Health Monit. 2016, 6, 3–16. [Google Scholar] [CrossRef]
- Martinez-Luengo, M.; Kolios, A.; Wang, L. Structural health monitoring of offshore wind turbines: A review through the Statistical Pattern Recognition Paradigm. Renew. Sustain. Energy Rev. 2016, 64, 91–105. [Google Scholar] [CrossRef]
- Huo, L.; Wang, B.; Chen, D.; Song, G. Monitoring of Pre-Load on Rock Bolt Using Piezoceramic-Transducer Enabled Time Reversal Method. Sensors 2017, 17, 2467. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Huo, L.; Chen, D.; Li, W.; Song, G. Impedance-based pre-stress monitoring of rock bolts using a piezoceramic-based smart washer—A feasibility study. Sensors 2017, 17, 250. [Google Scholar] [CrossRef] [PubMed]
- Na, W.; Baek, J. A review of the piezoelectric electromechanical impedance based structural health monitoring technique for engineering structures. Sensors 2018, 18, 1307. [Google Scholar] [CrossRef] [PubMed]
- Tinoco, H.A.; Ocampo, D.A.; Peña, F.M.; Sanz-Uribe, J.R. Finite element modal analysis of the fruit-peduncle of Coffea arabica L. var. Colombia estimating its geometrical and mechanical properties. Comput. Electron. Agric. 2014, 108, 17–27. [Google Scholar] [CrossRef]
- Bala, Y.; Lefèvre, E.; Roux, J.P.; Baron, C.; Lasaygues, P.; Pithioux, M.; Kaftandjian, V.; Follet, H. Pore network microarchitecture influences human cortical bone elasticity during growth and aging. J. Mech. Behav. Biomed. Mater. 2016, 63, 164–173. [Google Scholar] [CrossRef]
- Nadal, M.; Flexas, J.; Gulías, J. Possible link between photosynthesis and leaf modulus of elasticity among vascular plants: A new player in leaf traits relationships? Ecol. Lett. 2018, 21, 1372–1379. [Google Scholar] [CrossRef]
- Park, G.; Inman, D.J. Structural health monitoring using piezoelectric impedance measurements. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2007, 365, 373–392. [Google Scholar] [CrossRef]
- Yang, Y.; Lim, Y.Y.; Soh, C.K. Practical issues related to the application of the electromechanical impedance technique in the structural health monitoring of civil structures: I. Experiment. Smart Mater. Struct. 2008, 17, 035008. [Google Scholar] [CrossRef]
- Annamdas, V.G.M.; Soh, C.K. Application of electromechanical impedance technique for engineering structures: Review and future issues. J. Intell. Mater. Syst. Struct. 2010, 21, 41–59. [Google Scholar] [CrossRef]
- Bhalla, S.; Bajaj, S. Bone characterization using piezotransducers as biomedical sensors. Strain 2008, 44, 475–478. [Google Scholar] [CrossRef]
- Bhalla, S.; Suresh, R. Condition monitoring of bones using piezo-transducers. Meccanica 2013, 48, 2233–2244. [Google Scholar] [CrossRef]
- Mazlina, M.H.; Sarpinah, B.; Tawie, R.; Daho, C.D.; Annuar, I. Monitoring of bone healing by piezoelectric-EMI method. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2016; Volume 1705, p. 020008. [Google Scholar]
- Johnell, O.; Kanis, J. Epidemiology of osteoporotic fractures. Osteoporos. Int. 2005, 16, S3–S7. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, S.; Bhalla, S.; Madan, A. Assessment of human bones encompassing physiological decay and damage using piezo sensors in non-bonded configuration. J. Intell. Mater. Syst. Struct. 2017, 28, 1977–1992. [Google Scholar] [CrossRef]
- Moll, J.; Kexel, C.; Milanchian, H.; Bhavsar, M.B.; Barker, J.H. Ultrasound Bone Fracture Sensing and Data Communication: Experimental Results in a Pig Limb Sample. Ultrasound Med. Biol. 2018, in press. [Google Scholar] [CrossRef]
- Tabrizi, A.; Rizzo, P.; Ochs, M.W. Electromechanical impedance method to assess dental implant stability. Smart Mater. Struct. 2012, 21, 115022. [Google Scholar] [CrossRef]
- Ribolla, E.L.; Rizzo, P. Modeling the electromechanical impedance technique for the assessment of dental implant stability. J. Biomech. 2015, 48, 1713–1720. [Google Scholar] [CrossRef]
- Ribolla, E.L.M.; Rizzo, P.; Gulizzi, V. On the use of the electromechanical impedance technique for the assessment of dental implant stability: Modeling and experimentation. J. Intell. Mater. Syst. Struct. 2014, 26, 2266–2280. [Google Scholar] [CrossRef]
- Tinoco, H.A.; Gomez, J.P.; Torres, J.; Velasco, M.A. Structural differentiation of tooth supporting substances with the electromechanical impedance technique. Int. J. Mech. Mechatron. Eng. 2016, 16, 8–15. [Google Scholar]
- Tinoco, H.A.; Gomez, J.P.; Velasco, M.A.; Torres, J. Identification of stiffness variations in supporting substances of a human canine tooth with a bracket-beam-piezoelectric sensor and its electromechanical impedance. Future Dent. J. 2017, 3, 15–21. [Google Scholar] [CrossRef]
- Tinoco, H.A.; Cardona, C.I.; Peña, F.M.; Gomez, J.P.; Roldan-Restrepo, S.I. Assessment of Material Loss in a Human Teeth Support by Applying EMI Technique. Int. J. Mech. Mechatron. Eng. 2018, 18, 113–120. [Google Scholar]
- Huynh, T.C.; Kim, J.T. Impedance-based cable force monitoring in tendon-anchorage using portable PZT-interface technique. Math. Probl. Eng. 2014, 2014, 784731. [Google Scholar] [CrossRef]
- Huynh, T.C.; Dang, N.L.; Kim, J.T. Preload Monitoring in Bolted Connection Using Piezoelectric-Based Smart Interface. Sensors 2018, 18, 2766. [Google Scholar] [CrossRef] [PubMed]
- Annamdas, V.G.; Radhika, M.A. Electromechanical impedance of piezoelectric transducers for monitoring metallic and non-metallic structures: A review of wired, wireless and energy-harvesting methods. J. Intell. Mater. Syst. Struct. 2013, 24, 1021–1042. [Google Scholar] [CrossRef]
- Annamdas, V.G.M.; Soh, C.K. Evaluation of peak-free electromechanical piezo-impedance and electromagnetic contact sensing using metamaterial surface plasmons for load monitoring. Smart Mater. Struct. 2016, 26, 015003. [Google Scholar] [CrossRef]
- Sirohi, J.; Chopra, I. Fundamental understanding of piezoelectric strain sensors. J. Intell. Mater. Syst. Struct. 2000, 11, 246–257. [Google Scholar] [CrossRef]
- Tinoco, H.A.; Robledo-Callejas, L.; Marulanda, D.J.; Serpa, A.L. Damage detection in plates using the electromechanical impedance technique based on decoupled measurements of piezoelectric transducers. J. Sound Vib. 2016, 384, 146–162. [Google Scholar] [CrossRef]
- Hu, X.; Zhu, H.; Wang, D. A study of concrete slab damage detection based on the electromechanical impedance method. Sensors 2014, 14, 19897–19909. [Google Scholar] [CrossRef]
- Fu, J.; Tan, C.; Li, F. Quantitative electromechanical impedance method for nondestructive testing based on a piezoelectric bimorph cantilever. Smart Mater. Struct. 2015, 24, 065038. [Google Scholar] [CrossRef]
- Tinoco, H.A.; Marulanda, D.J. Damage Identification in Active Plates with Indices Based on Gaussian Confidence Ellipses Obtained of the Electromechanical Admittance. J. Nondestruct. Eval. 2015, 34, 28. [Google Scholar] [CrossRef]
- Tinoco, H.A.; Rosas-Bastidas, D.A. Experimental study of the debonding effects on the electromechanical impedance of piezo wafer active sensors. In Proceedings of the Third International Conference on Advanced Mechatronics, Design, and Manufacturing Technology (AMDM 2016), Cali, Colombia, 13–15 April 2016; pp. 1–10. [Google Scholar]
- Liang, C.; Sun, F.P.; Rogers, C.A. Coupled electro-mechanical analysis of adaptive material systems-determination of the actuator power consumption and system energy transfer. J. Intell. Mater. Syst. Struct. 1994, 8, 335–343. [Google Scholar] [CrossRef]
- Farrar, C.R.; Park, G.; Sohn, H.; Inman, D.J. Overview of piezoelectric impedance-based health monitoring and path forward. Shock. Vib. Dig. 2003, 35, 451–463. [Google Scholar]
- Giurgiutiu, V.; Zagrai, A. Damage detection in thin plates and aerospace structures with the electro-mechanical impedance method. Struct. Health Monit. 2005, 4, 99–118. [Google Scholar] [CrossRef]
- Tawie, R.; Lee, H.K. Monitoring the strength development in concrete by EMI sensing technique. Constr. Build. Mater. 2010, 24, 1746–1753. [Google Scholar] [CrossRef]
- De Freitas, E.S.; Baptista, F.G. Experimental analysis of the feasibility of low-cost piezoelectric diaphragms in impedance-based SHM applications. Sens. Actuators A Phys. 2016, 238, 220–228. [Google Scholar] [CrossRef]
- Tua, P.S.; Quek, S.T.; Wang, Q. Detection of cracks in cylindrical pipes and plates using piezo-actuated Lamb waves. Smart Mater. Struct. 2005, 14, 1325. [Google Scholar] [CrossRef]
- Campeiro, L.M.; da Silveira, R.Z.; Baptista, F.G. Impedance-based damage detection under noise and vibration effects. Struct. Health Monit. 2018, 17, 654–667. [Google Scholar] [CrossRef]
- Day, J.S.; Ding, M.; Van Der Linden, J.C.; Hvid, I.; Sumner, D.R.; Weinans, H. A decreased subchondral trabecular bone tissue elastic modulus is associated with pre-arthritic cartilage damage. J. Orthop. Res. 2001, 19, 914–918. [Google Scholar] [CrossRef]
- Osterhoff, G.; Morgan, E.F.; Shefelbine, S.J.; Karim, L.; McNamara, L.M.; Augat, P. Bone mechanical properties and changes with osteoporosis. Injury 2016, 47, S11–S20. [Google Scholar] [CrossRef]
- Tinoco, H.; Peña, F. Finite Element Analysis of Coffea arabica L. var. Colombia Fruits for Selective Detachment Using Forced Vibrations. Vibration 2018, 1, 207–219. [Google Scholar] [CrossRef]
- Strek, T.; Jopek, H.; Wojciechowski, K.W. The influence of large deformations on mechanical properties of sinusoidal ligament structures. Smart Mater. Struct. 2016, 25, 054002. [Google Scholar] [CrossRef]
- Lee, S.H.; Moon, W.K.; Cho, N.; Chang, J.M.; Moon, H.G.; Han, W.; Noh, D.Y.; Lee, J.C.; Kim, H.C.; Lee, K.B.; et al. Shear-wave elastographic features of breast cancers: Comparison with mechanical elasticity and histopathologic characteristics. Investig. Radiol. 2014, 49, 147–155. [Google Scholar] [CrossRef]
- Palacio-Torralba, J.; Good, D.W.; Stewart, G.D.; McNeill, S.A.; Reuben, R.L.; Chen, Y. A novel method for rapid and quantitative mechanical assessment of soft tissue for diagnostic purposes: A computational study. Int. J. Numer. Methods Biomed. Eng. 2018, 34, e2917. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tinoco, H.A.; Cardona, C.I.; Peña, F.M.; Gomez, J.P.; Roldan-Restrepo, S.I.; Velasco-Mejia, M.A.; Barco, D.R. Evaluation of a Piezo-Actuated Sensor for Monitoring Elastic Variations of Its Support with Impedance-Based Measurements. Sensors 2019, 19, 184. https://doi.org/10.3390/s19010184
Tinoco HA, Cardona CI, Peña FM, Gomez JP, Roldan-Restrepo SI, Velasco-Mejia MA, Barco DR. Evaluation of a Piezo-Actuated Sensor for Monitoring Elastic Variations of Its Support with Impedance-Based Measurements. Sensors. 2019; 19(1):184. https://doi.org/10.3390/s19010184
Chicago/Turabian StyleTinoco, Hector A., Carlos I. Cardona, Fabio M. Peña, Juan P. Gomez, Samuel I. Roldan-Restrepo, Maria A. Velasco-Mejia, and Daniel R. Barco. 2019. "Evaluation of a Piezo-Actuated Sensor for Monitoring Elastic Variations of Its Support with Impedance-Based Measurements" Sensors 19, no. 1: 184. https://doi.org/10.3390/s19010184
APA StyleTinoco, H. A., Cardona, C. I., Peña, F. M., Gomez, J. P., Roldan-Restrepo, S. I., Velasco-Mejia, M. A., & Barco, D. R. (2019). Evaluation of a Piezo-Actuated Sensor for Monitoring Elastic Variations of Its Support with Impedance-Based Measurements. Sensors, 19(1), 184. https://doi.org/10.3390/s19010184