1. Introduction
The inverse synthetic aperture radar (ISAR) has many important detecting and recognizing applications in many civilian and military fields such as air traffic control, harbor and river traffic surveillance, and the remote sensing of satellites under the conditions all-weather and all-day [
1,
2,
3]. Compared to monostatic ISAR, Bistatic ISAR (Bi-ISAR) has many advantages, such as platform flexibility, and immunity to electronic countermeasures and physical attack. The configurations in which the transmitter and the receiver are installed on separate platforms can offer more freedom for acquiring complementary target information and avoiding blind velocities [
4,
5,
6]. In conventional Range-Doppler imaging, by means of intra-pulse frequency modulation for radar waveforms, the range resolution and the detection range can be improved via the pulse compression technique and large time-bandwidth product waveforms [
7]. These large time and band product signals, which include chirp signal, frequency-stepped signal, and frequency-stepped chirp signal, are commonly utilized in modern radar systems [
8,
9,
10,
11]. However, the drawback of the chirp signal is that the ambiguity apparent in range and velocity, which can be seen from the “ridge” ambiguity function, and frequency-stepped waveform need a relatively long coherent processing interval (CPI) to complete the transmitting and receiving process of each burst, and the wide aspect angle with long CPI may lead to range cell migration (RCM). These disadvantages greatly degrade the ISAR imaging quality. Thus, ISAR imaging based on the V-style modulation (V-FM) waveform has been proposed because of the “thumbtack” ambiguity function, which can mitigate the ambiguity apparent in range and velocity [
12].
Compressed Sensing (CS) theory states that sparse or compressible signals are able to be reconstructed exactly from limited measurements by solving a sparsity-constrained optimization problem with a high probability, which has been used in many fields such as medical imaging and radar [
13]. CS has been adopted to achieve high resolution and well-focused ISAR images using sparse sampling data [
14,
15,
16]. ISAR imaging with wideband V-FM waveforms has been proposed in [
17]. Gu and Pan et al. in [
12] adopted dual-channel CS-based dechirping (CS-D) to achieve high resolution range profiles (HRRPs) of V-FM waveforms. In the framework, the HRRPs reconstruct themselves by solving the a
norm convex optimization problem and using Fourier transform (FT) in azimuth direction to obtain the final 2D images. An improved CS-based high azimuth imaging method is developed to overcome strong noise and clutter in [
18]. However, the above methods are the sparsity-based high range or azimuth resolution imaging methods, which are very time consuming because of the high computational complexity and storage system requirements. To avoid the above disadvantages, two-dimension (2D) coupled imaging methods have been proposed [
19,
20,
21,
22]. The traditional 2D Fourier Transform method (2D-FFT) needs long data collection, which in reality, is unachievable. In [
19], sensing matrices are designed in the cross range and range direction to implement sparse sampling in both directions and 2D-SL0 algorithm is used to achieve high-resolution, fully polarimetric ISAR images. A novel two-dimensional (2D) group primal dual active set with the continuation (2DGPDASC) algorithm is used to recover an ISAR image in [
10]. In [
22], the sparsity-based imaging algorithms used to achieve range and azimuth resolutions simultaneously are proposed, but the ISAR imaging matrix vectoring to the one-dimensional (1D) model results in extensive memory usage.
In summary, existing research on ISAR imaging with the V-FM signal can achieve high-resolution images based on 1D sparsity-driven algorithms, but there is little research on V-FM signal Bi-ISAR 2D-CS imaging. In this framework, we establish Bi-ISAR echoes as a 2D-coupled, super-resolution model in the range and azimuth domains by analyzing the characteristics of echoes. Then, we adopt a dual-channel, two dimensional, smoothed L0 (2D-SL0) model to achieve Bi-ISAR imaging, which belongs to a nonconvex optimization problem. Using the steepest descent method and gradient projection principle, the nonconvex approach is advantageous in that it usually yields sparser solutions for a given size of samples, as well as short reconstruction time and low calculation load.
The remainder of this paper is organized as follows. In
Section 2, the signal model and Bi-ISAR echoes are introduced. The CS theory is presented in
Section 3, the 2D-coupled SR models of V-FM echoes in the dual channel are constructed, and the improved dual-channel 2D-SL0 algorithm for Bi-ISAR imaging is proposed.
Section 4 presents the experimental results to validate the effectiveness of the proposed method, and, finally, conclusions are drawn and presented in
Section 5.
2. Signal Model and Imaging
The relative motion between radar and target in ISAR imaging consists of translation motion and rotation motion. In this paper, we suppose that the target’s translation motion, which is defined as the movement of the target along the range axis of the radar, has been well completed previously [
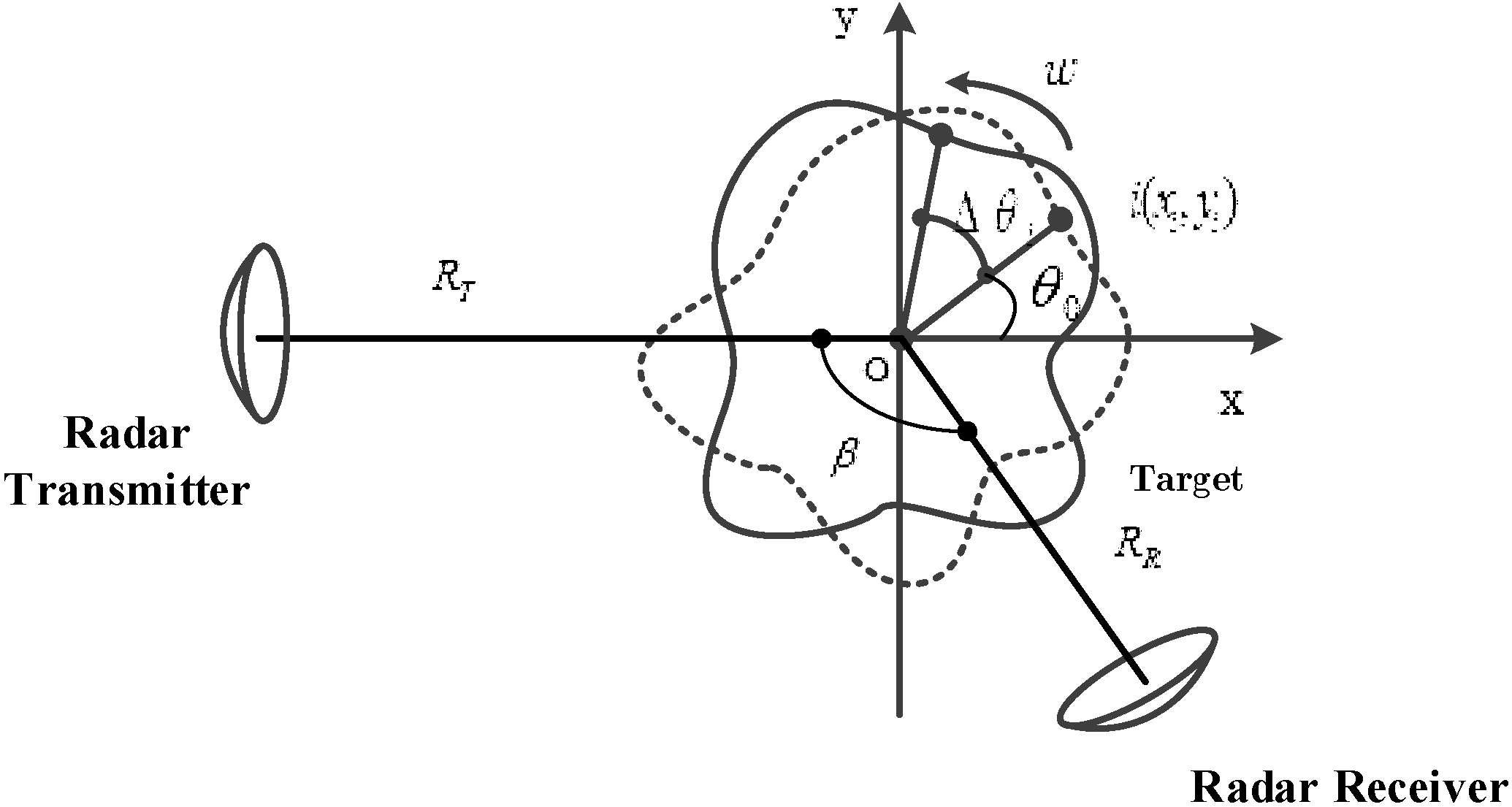
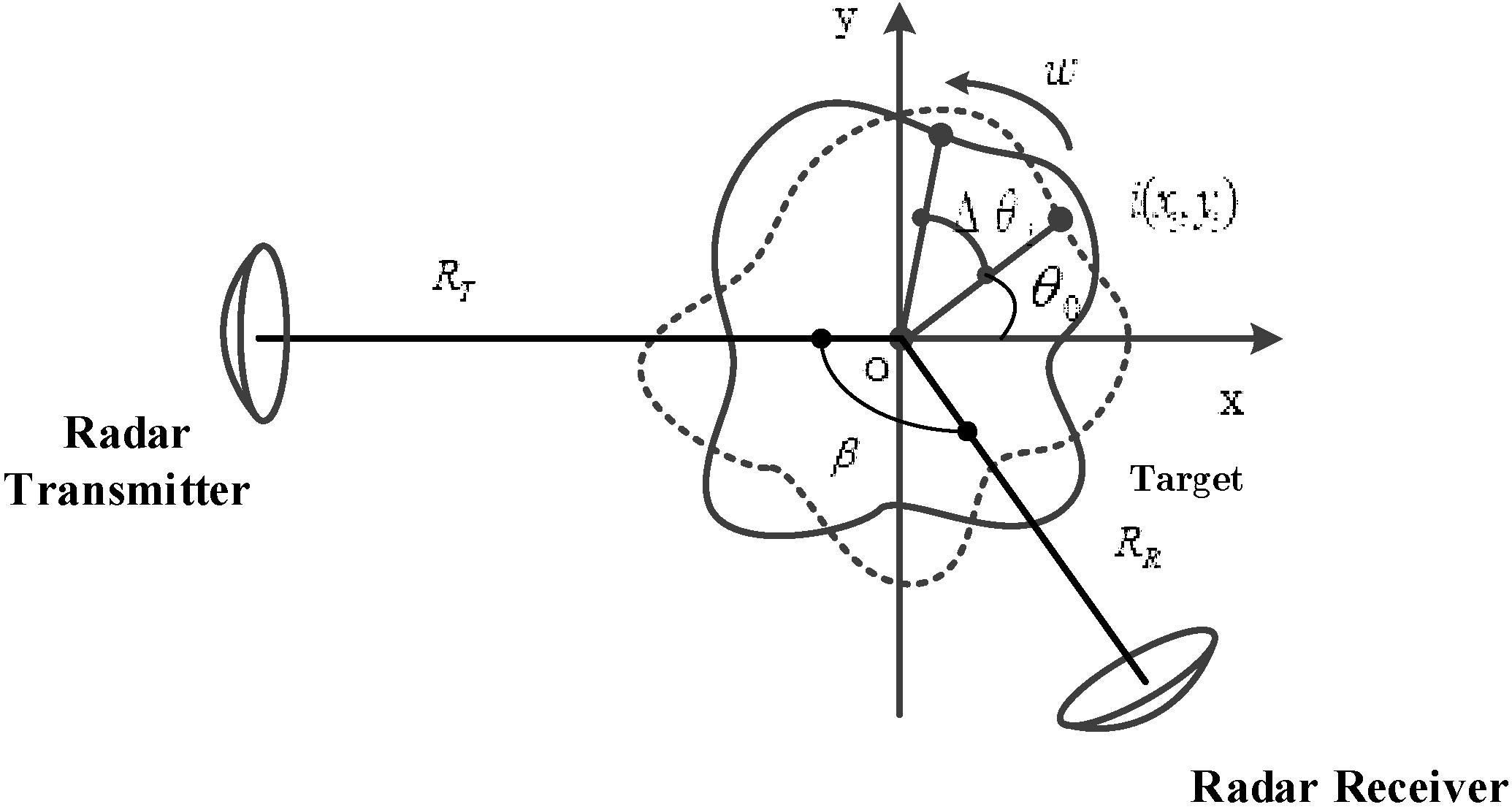
2]. The target has been converted into a turntable model. The geometry of bistatic ISAR imaging is illustrated in
Figure 1, the local coordinate system.
is on the moving target, and the point
of the moving target is chosen as the origin. The moving target has the circular motion with a constant rotation rate of
rad/s;
represents the distance from point
to reference point
, and
and
are the distances from point
to the receiver and transmitter, respectively. The dash line represents the initial position of the target, the solid line represents the position after a rotation angle
, and
is the bistatic angle, which is kept constant during short CPI; the instantaneous distance sum from the scattering point
to the transmitter and receiver is given as (see
Appendix A.1)
Generally, the observation time of Bi-ISAR imaging is very short, and the rotation angle can be approximated by the first-order series
Assume that the V-FM waveforms are composed of two chirp signals with opposite slopes as depicted in
Figure 2, which follows
in which
and
is the chirp rate,
is the pulse duration and bandwidth
, and
represents the fast time.
Figure 2 shows the time-frequency of V-FM waveforms.
The transmitted V-FM waveform can be expressed as follows:
in which
is the frequency of carrier wave,
is the slow time,
is the full time, and
. If the pulse repetition interval (PRI) of radar is
, then
.
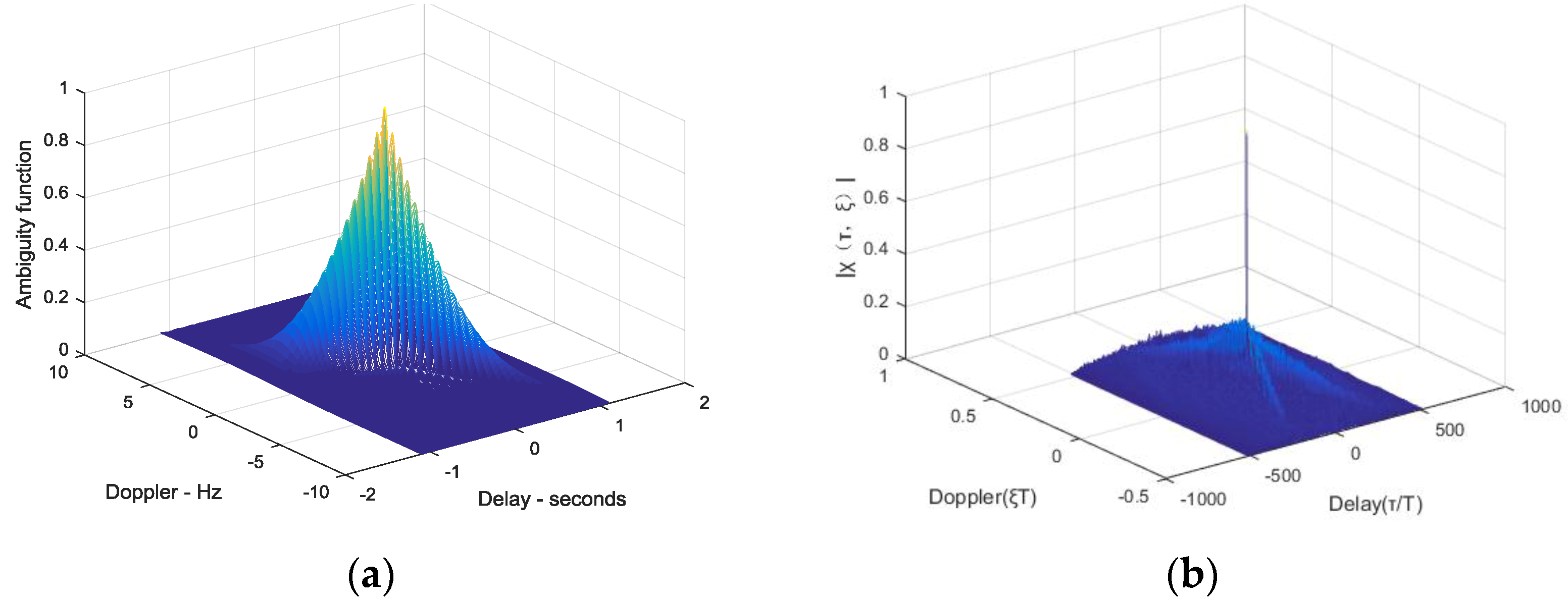
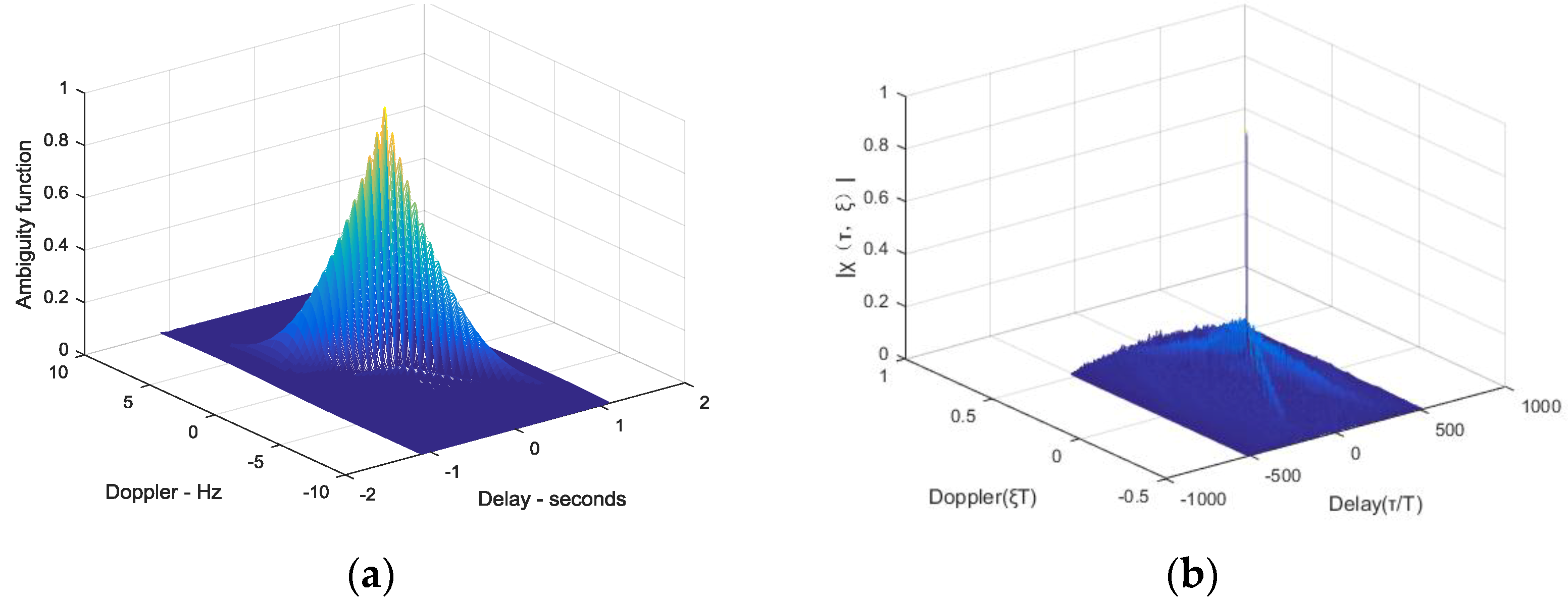
To compare the difference between linear frequency modulation (LFM) signal and V-FM signal, the ambiguity function is calculated and simulated, respectively. The definition of the ambiguity function of
is as follows:
in which
is the delay, which represents range, and
is the Doppler frequency, which represents velocity. The results of both signals are shown in
Figure 3; the horizontal axis represents range and velocity, and the vertical axis represents the normalized value of
, which shows that the “thumbtack” ambiguity function of the V-FM signal mitigates the ambiguity apparent in range and velocity compared with the “ridge” ambiguity function of the LFM signal.
Supposing that the target consists of
strong scatterers, the echo of the scattering center
can be written as
in which
is the scattering coefficient of point
,
represents the distance sum from the
i-th scattering center to the transmitter and the receiver, and
is the speed of the electromagnetic wave.
The reference signals of dual-channel dechirping can be expressed as
in which
is the reference range
,
is the reference pulse duration, and
; then, the echoed signal in dual channels after dechirping can be expressed as follows:
in which
, and we set
. The first exponentials of
and
are the range items that produce beat frequencies
and
, respectively. The second exponentials of
and
are residual video phases (RVPs), and the third exponentials account for Doppler shift. The RVP can be removed by the translation motion compensation (TMC) algorithm.
Taking the time of reference point as a basis, applying Fourier transform (FT) and multiplying by a constant conversion coefficient
, we have
in which
represents the down-range domain. It is noted that two channels have the same amplitude but are symmetrical regarding zero in the down range domain. After envelope alignment and removing the residual video phase (RVP), the final synthesized signal can be obtained as
in which
represents flipping the left part of the signal in a channel to the right part.
Substituting (2) into (13), we have
in which
represents the Doppler frequency and
is the wavelength. The signal in the range domain, ignoring the constant phase term, becomes
The cross range compression is obtained by applying FT to (15) in terms of
as follows:
in which
is the Doppler extent,
is the pulse repetition frequency (PRF), and
is the observation time. From (16), it can be seen that the target image is sparse in the Range-Doppler (RD) plane, and there are a few strong scatter points in the whole plane. It can be inferred that RD imaging may fail when measured data is too limited to provide sufficient resolution. Long data-collect time is needed for high resolution in ISAR imaging, but because the targets are noncooperative and usually maneuvering, it is difficult to collect sufficient data and have long observation times, which motivates the study of high-resolution ISAR imaging algorithms based on V-FM waveforms with limited data.
4. Experimental Results
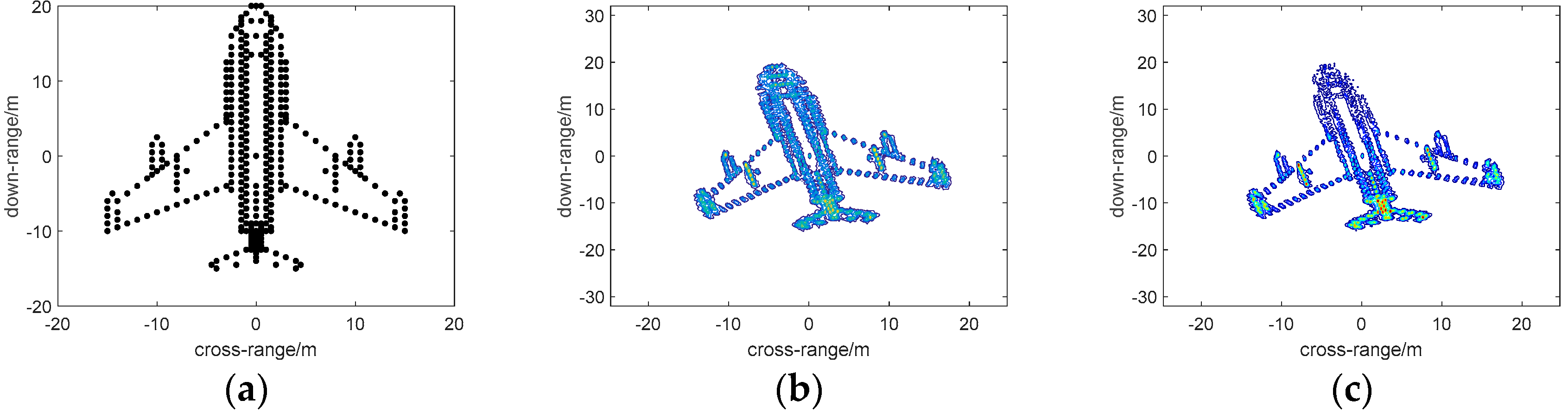
In this section, we will implement numerical simulations to verify the performance of dual-channel 2D sparse signal reconstruction in V-FM bistatic ISAR imaging; targets modeled as point scatterers are utilized in the following, as shown in
Figure 4a. The V-FM signal ISAR works at the X-band with a carrier frequency of 10 GHz and bandwidth of 300 MHz. The pulse-width is 100 us, the pulse frequency is 1 kHz, and the rotating velocity is 0.05 Hz; we set
and
. The main simulated parameters are listed in
Table 1. The bistatic ISAR imaging results via the traditional RD method and 2D-SL0 are shown in
Figure 4b,c; it can be noted that the 2D-SL0 based image shown in
Figure 4c has a finer resolution than by another method.
To provide a quantitative evaluation for imaging performance, we take three indexes related to radar target recognition. The first evaluation index is the entropy of the image; the larger the entropy is, the more complex the image information is and the worse the imaging result. The second evaluation index is the normalized root mean square error (RMSE) between the reconstructed image and the target model is computed, which is
In addition, the correlation coefficient (CC) is the third index, which can be expressed as follows:
in which
and
represent the covariance and variance coefficient between two matrices, respectively.
In the following imaging experiments, these indexes are adopted as the quantitative indexes to evaluate the Bi-ISAR image quality with different reconstruction methods, including 2DFFT, FFT in down-range domain, SL0 in cross-range domain (FFTSL0), and 2DSL0.
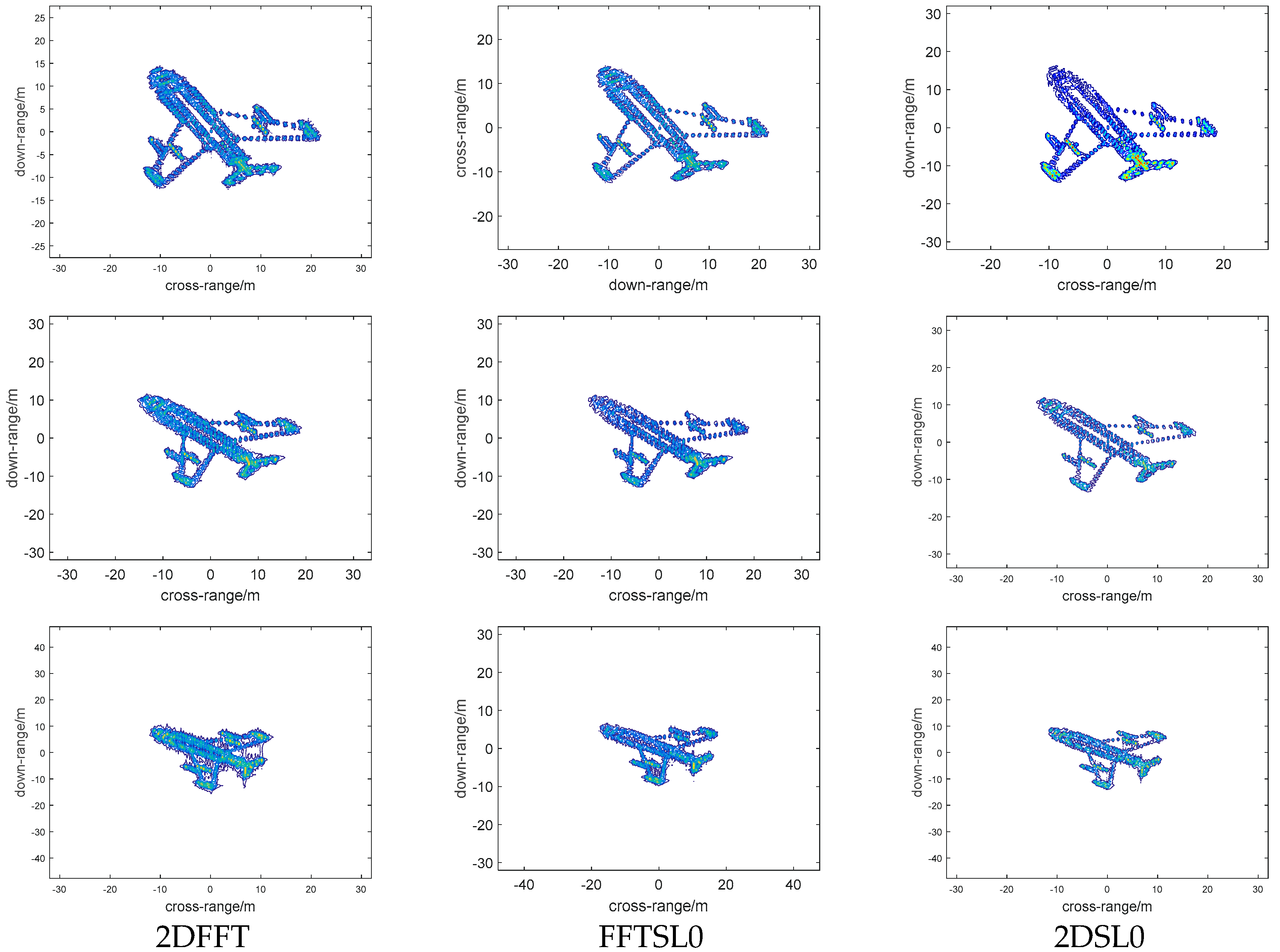
4.1. Imaging Results Versus Bi-Angle
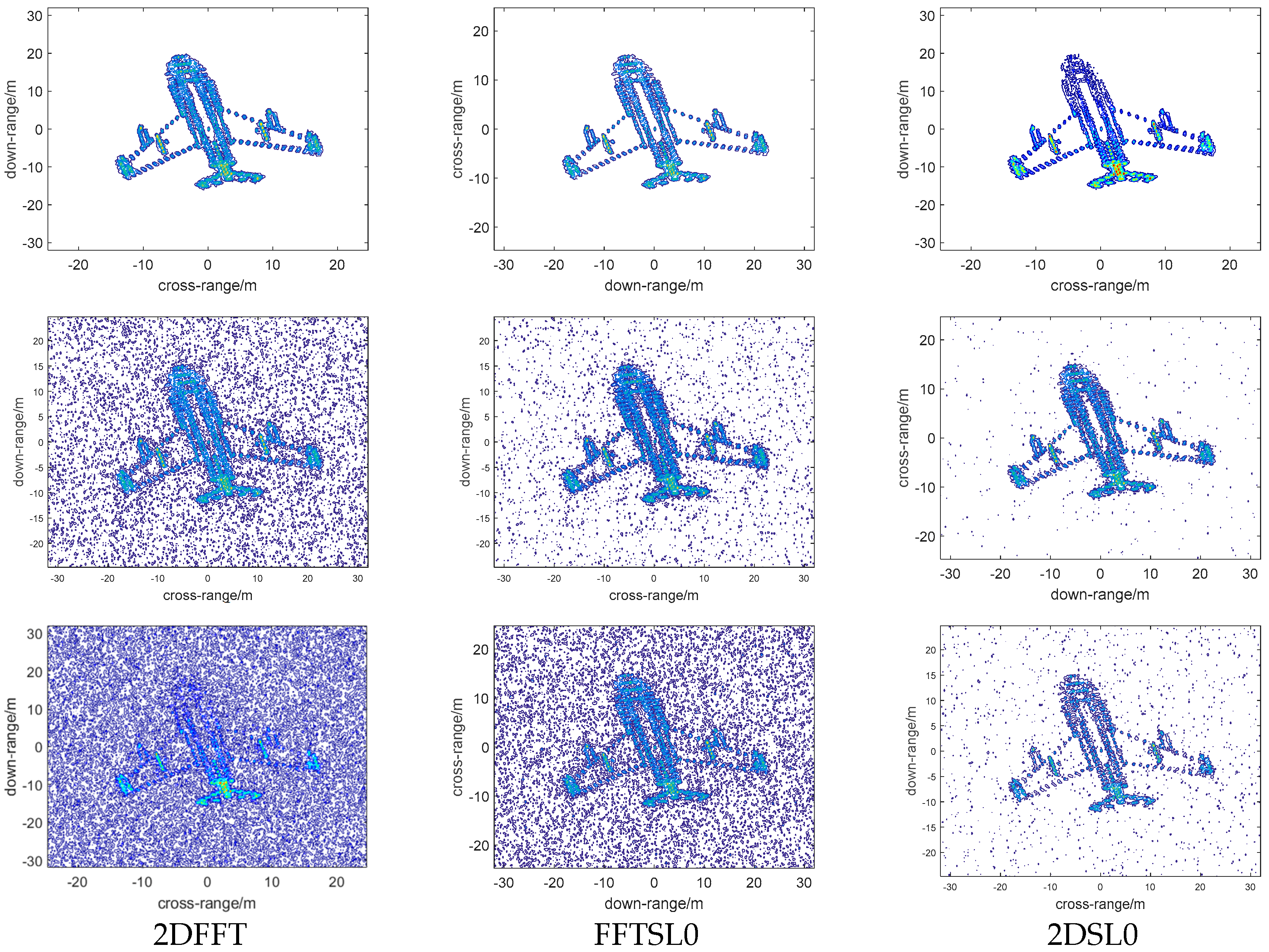
First, we will examine the performance of different reconstruction methods versus bi-angle (60°, 90°, 120°), and the imaging results are shown in
Figure 5; the first, second, third columns represent 2DFFT, FFTSL0, 2DSL0 images, respectively, and the first, second, third rows represent images with bi-angle 60°, 90°, and 120°, respectively. We can note that the imaging results become defocused as the bi-angle increases, and 2DSL0 method can provide better focal quality with high resolution than other methods, and, when the bi-angle is 120°, the quality of the image becomes worse. From
Figure 5, it implies that the traditional Fourier transform or 2D-CS method cannot eliminate the influence of the bistatic angle and another method is required to overcome this problem.
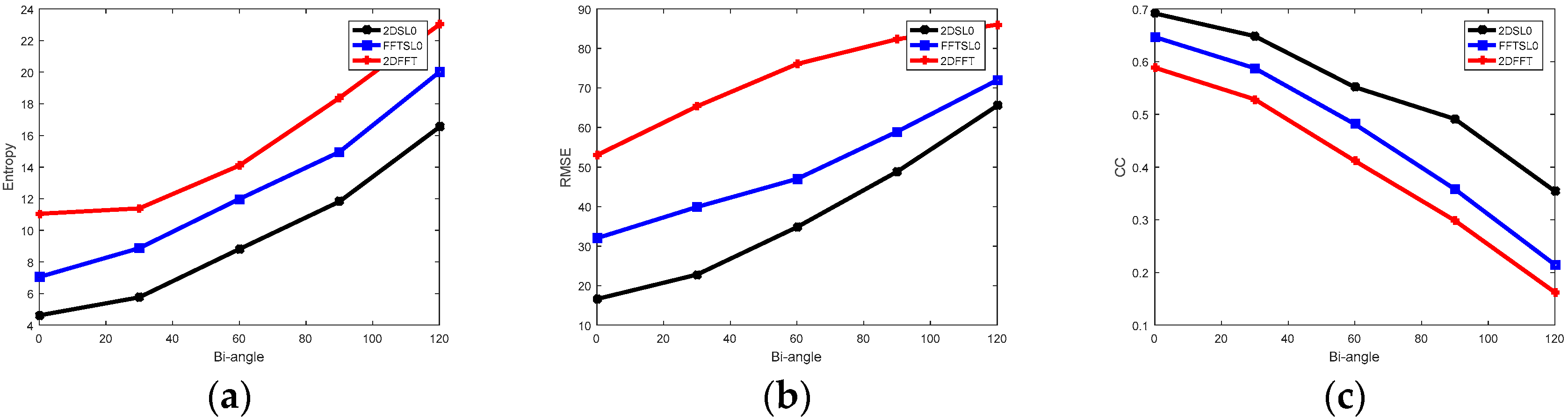
To characterize the performance quantitatively, the corresponding curves of entropy, RMSE, and CC are shown in
Figure 6. In
Figure 6a, it is obvious that the entropy obtained by using 2DSL0 method is lower than that of both 2DFFT and FFTSL0 method. Lower entropy suggests that the quality of imaging result is better. In
Figure 6b, the 2DSL0 method performs best among three methods, since it retains the smallest reconstruction errors. From
Figure 6c, we find that when the bi-angle is lower than 30°, the reconstructed Bi-ISAR image with the 2DSL0 method is very close to the original image, and CC values increase when bi-angle decreases.
4.2. Performance Versus SNRs
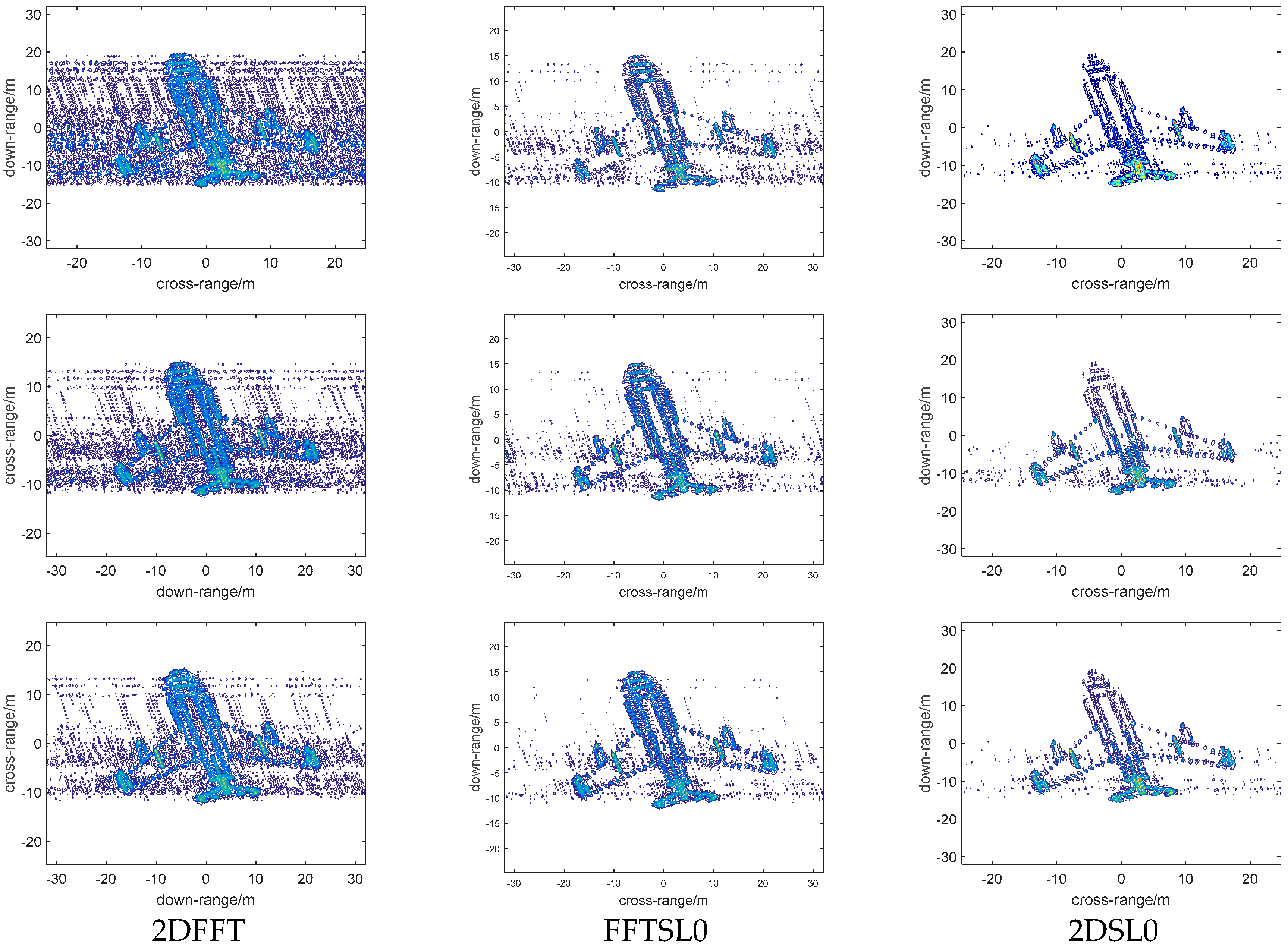
To prove that the robustness of different reconstruction methods degrades with increasing noise, we analyzed the effect of different SNRs on Bi-ISAR imaging; simulations with Gaussian distributed complex noise with three SNRs of 5 dB, 0 dB, and −5 dB added into the simulated VFM signals were performed, and the imaging results are shown in
Figure 7. The first, second, and third columns represent 2DFFT, FFTSL0, and 2DSL0 images, respectively, and first, second, and third rows represent images with SNR of 5 dB, 0 dB, and −5 dB, respectively. With the increase in SNR in experiments, the focusing performance of the 2DSL0 method degrades slightly; the 2DSL0 can eliminate much more noise than other methods.
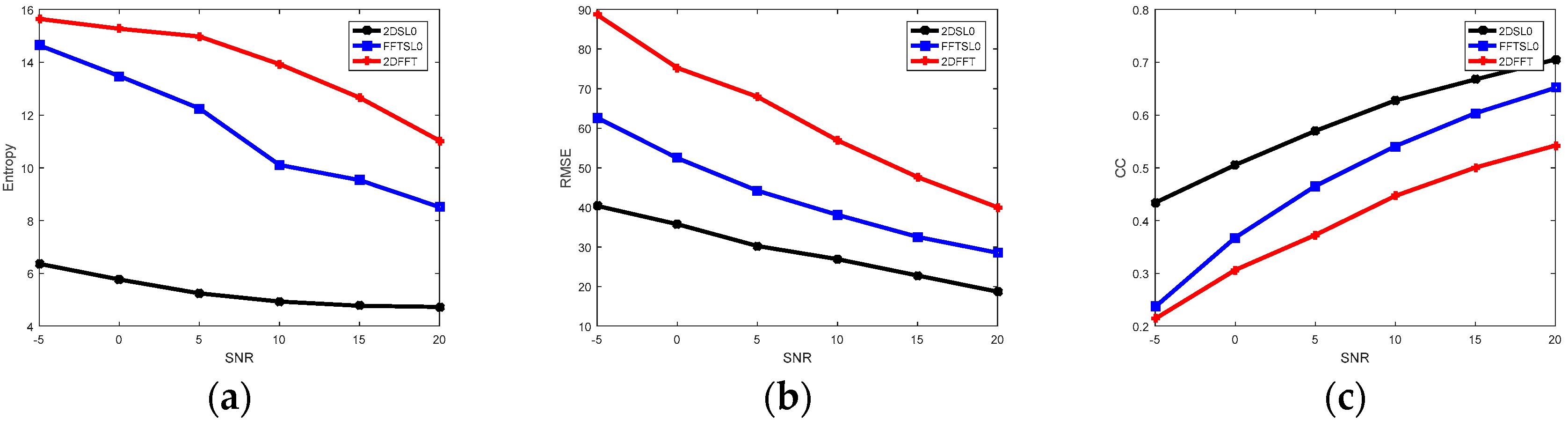
Entropy, RMSE, and CC are also used to analyze their performance quantitatively, as shown in
Figure 8. In
Figure 8a, the entropy values of 2DSL0 are much lower than those of both 2DFFT and FFTSL0 method, which means 2DSL0-based imaging results have lower chaos than others methods do, and have the best imaging as a result. In
Figure 8b, the 2DSL0 method performs best among three methods, since it retains the smallest reconstruction errors, and the RMSE values decrease under an increase of SNR. From
Figure 6c, it notes that when the SNR is higher than 15 dB, the reconstructed Bi-ISAR image with 2DSL0 method is very close to the original image, and the results have a positive correlation with SNR.
4.3. Experiments with Different Echo Data
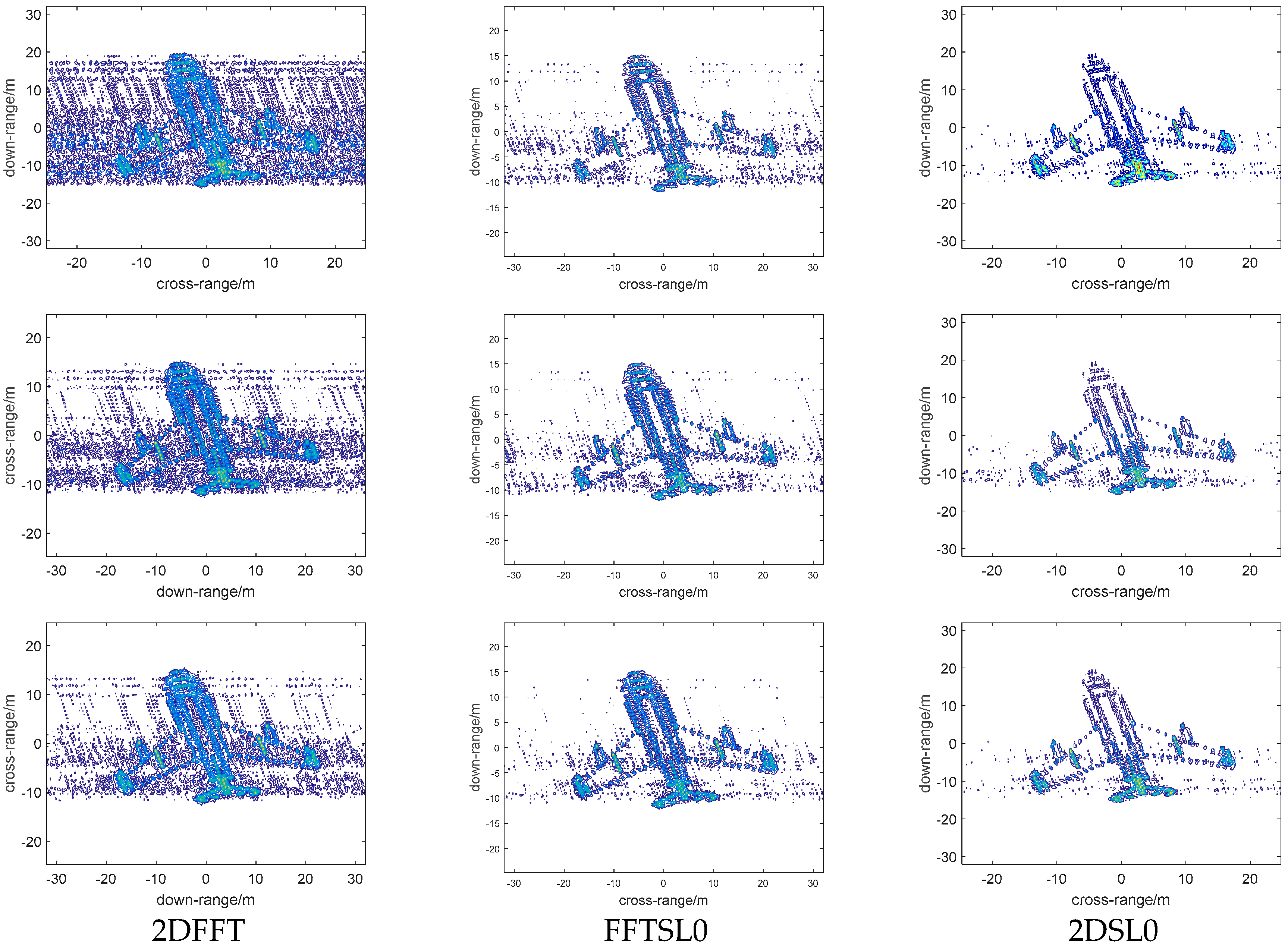
In the following, the Bi-ISAR images are generated with different measurements and constant SNR (20 dB), and the measured data used changes from 40% to 80% of echo data.
Figure 9 demonstrates the Bi-ISAR imaging results with different reconstruction methods under different measurements (50%, 65%, and 78% of echo data). The first, second, and third columns represent 2DFFT, FFTSL0, 2DSL0 images, respectively, and the first, second, and third rows represent images with measurements (50%, 65%, and 78% of echo data, respectively). It is noticeable that among these Bi-ISAR images, the 2D resolution and focusing energy obtained by the 2DSL0 method is the best, and the 2DFFT method the worst. There is aliasing in cross-range domain under incomplete measurements when using traditional Fourier transform.
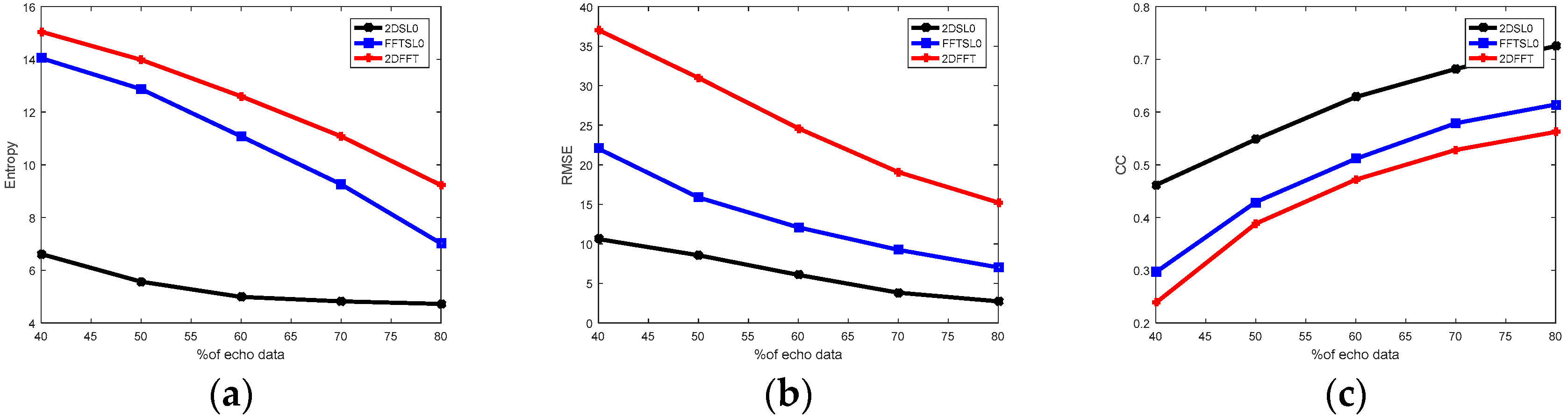
Taking three indexes to analyze the quality of imaging results with different reconstruction versus measurements, as shown in
Figure 10. In
Figure 10a, the entropy values of 2DSL0 are much lower than those of both 2DFFT and FFTSL0 method, especially when the measurements of echo data are low. In
Figure 8b, the 2DSL0 method performs best among three methods, since it retains the smallest reconstruction errors, and more echo data provides more information for imaging. In
Figure 10c, the CC values of the 2DSL0 method are larger than those both methods. The larger CC is higher than the similarity between the reconstructed Bi-ISAR image and the referenced image. This implies that the 2DSL0 method can perform more accurate reconstruction than the other two methods.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}