Damage Detection in Active Suspension Bridges: An Experimental Investigation





Abstract
1. Introduction
2. Theoretical Background
2.1. Hilbert–Huang Transform (HHT)
- In the whole data set, the number of extrema and the number of zero crossings must be equal or different at most by one.
- At any point, the mean value of the envelope defined by the local maxima and the envelope defined by the local minima is zero.
2.2. Damage Index
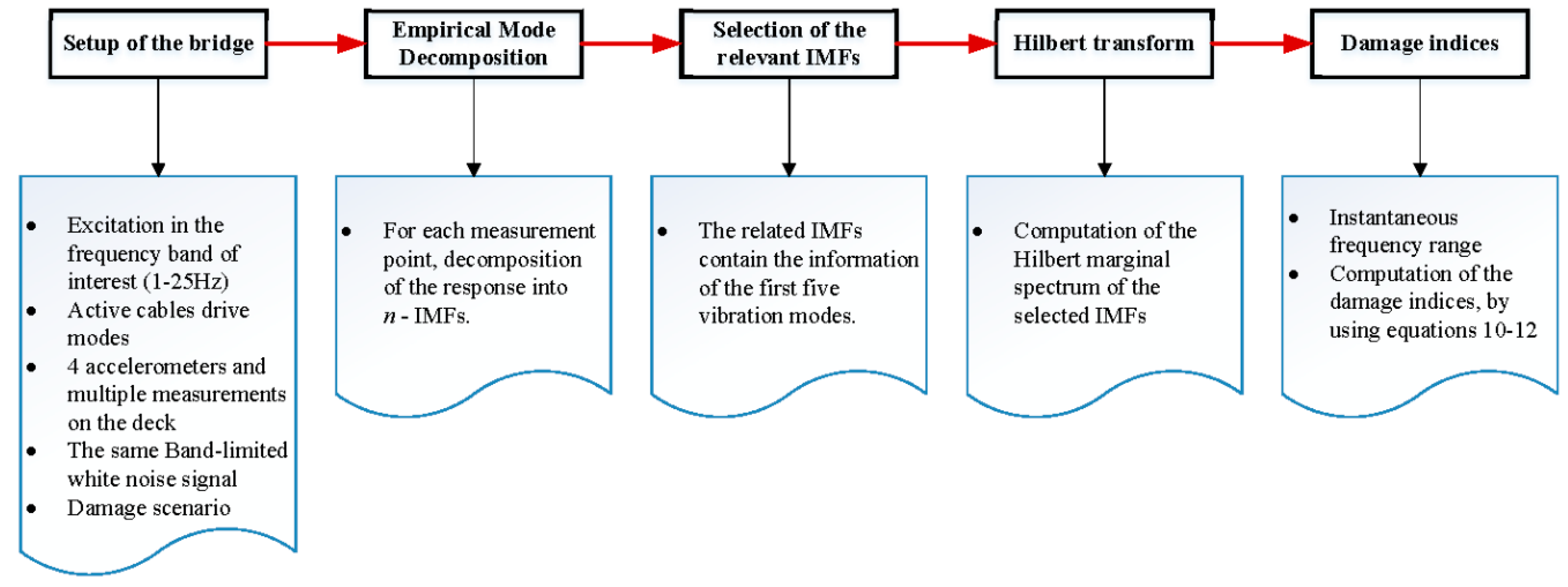
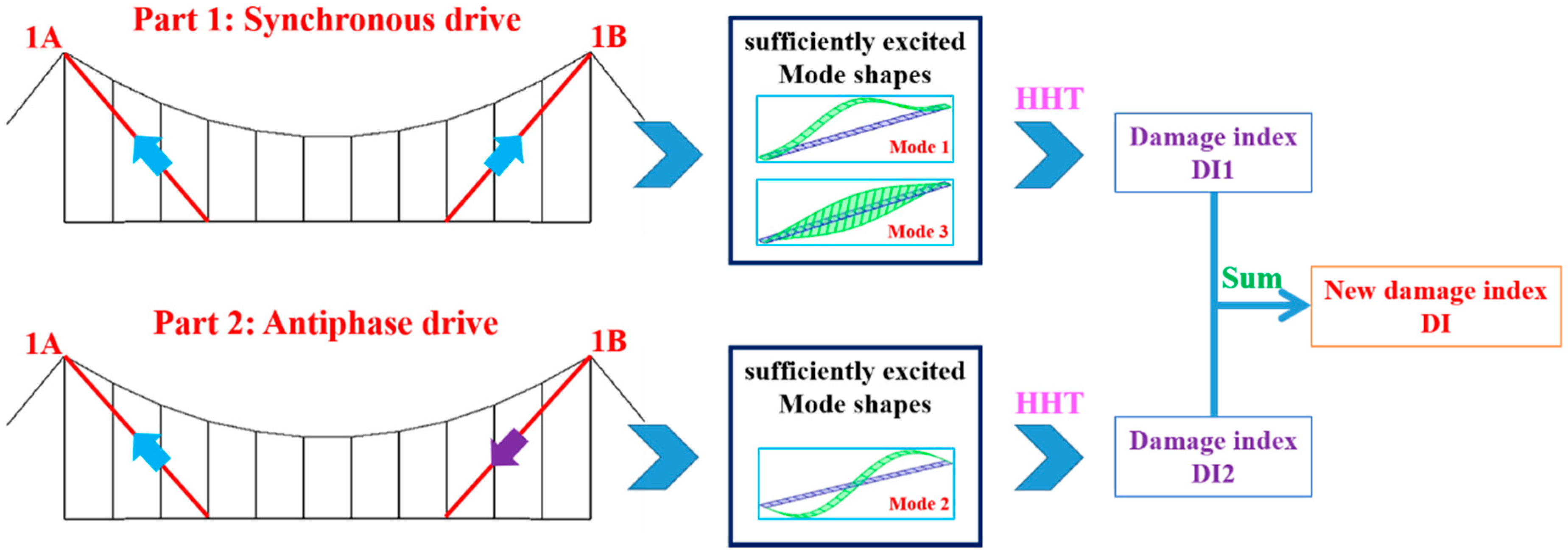
2.3. Proposed Methodology
- First, the bridge (damaged and undamaged) is excited with the active cables and the response is measured at several measurement points. For the considered bridge, it is measured on the deck, near to the hangers’ attachment.
- Second, the data from the same measurement points (damaged and undamaged) are decomposed into n-empirical modes (IMFs). By analyzing the central frequencies of the IMFs, the related IMFs are selected which contain the information of the dominant modes (for the considered bridge, the first five vibration modes).
- Third, the Hilbert marginal spectrum of each measurement point is computed using the related IMFs (damaged and undamaged).
- Finally, the damage indices are calculated using Equations (10)–(12) for each damage scenario.
3. Experimental Testing of the Suspension Bridge Mock-Up
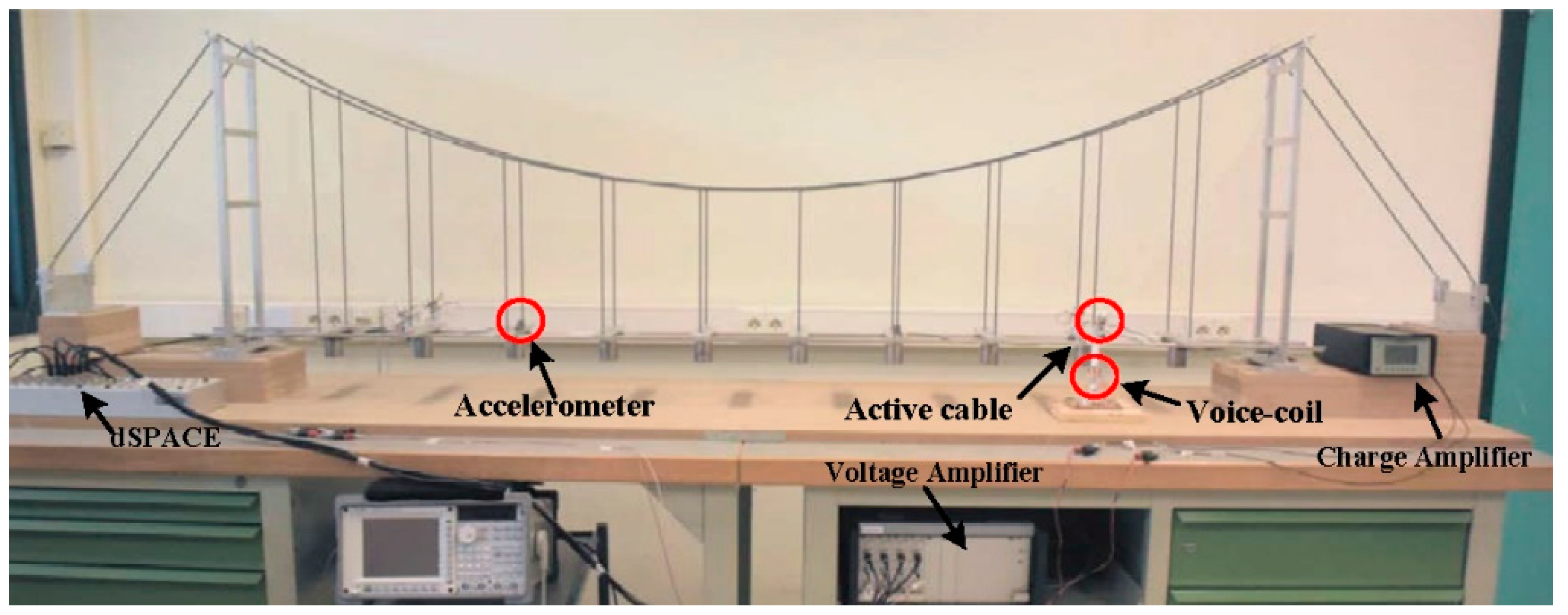
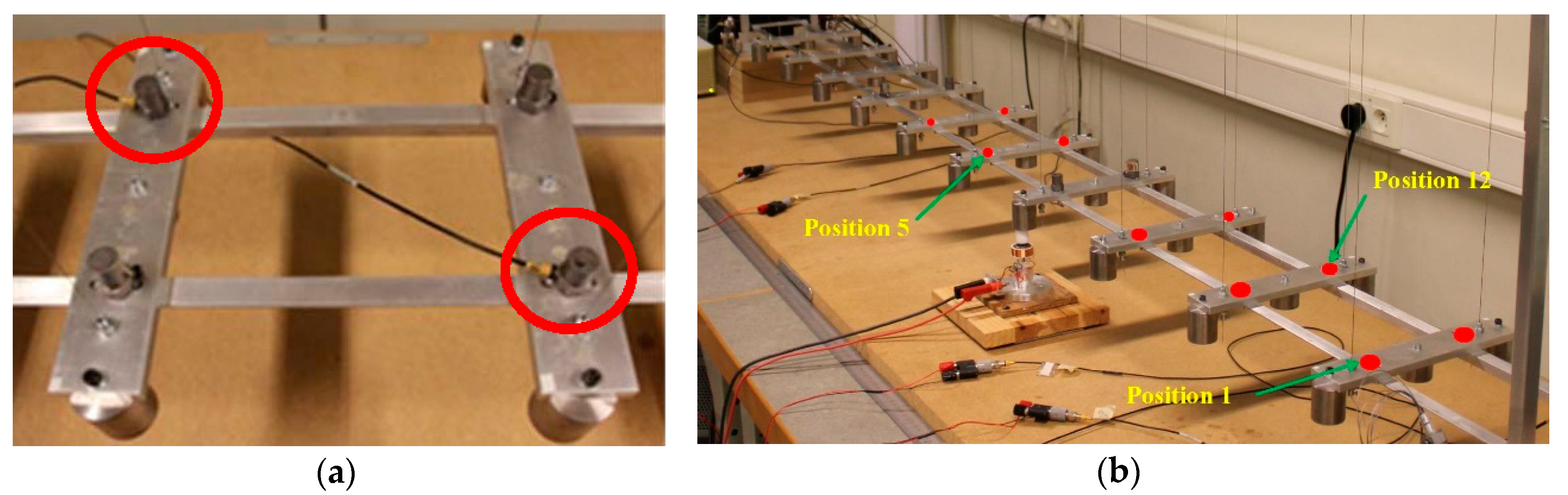
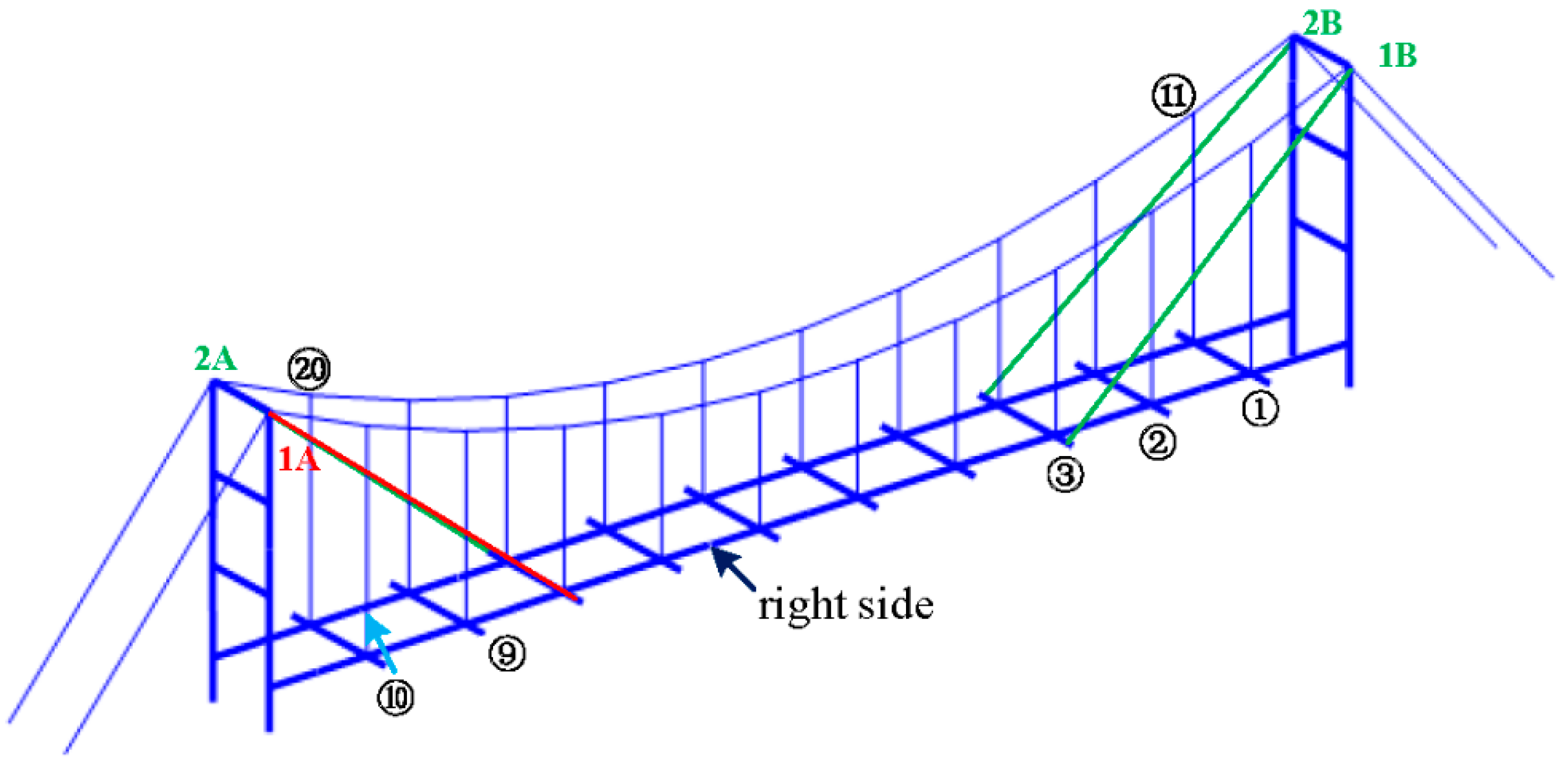
3.1. Laboratory Suspension Bridge Model
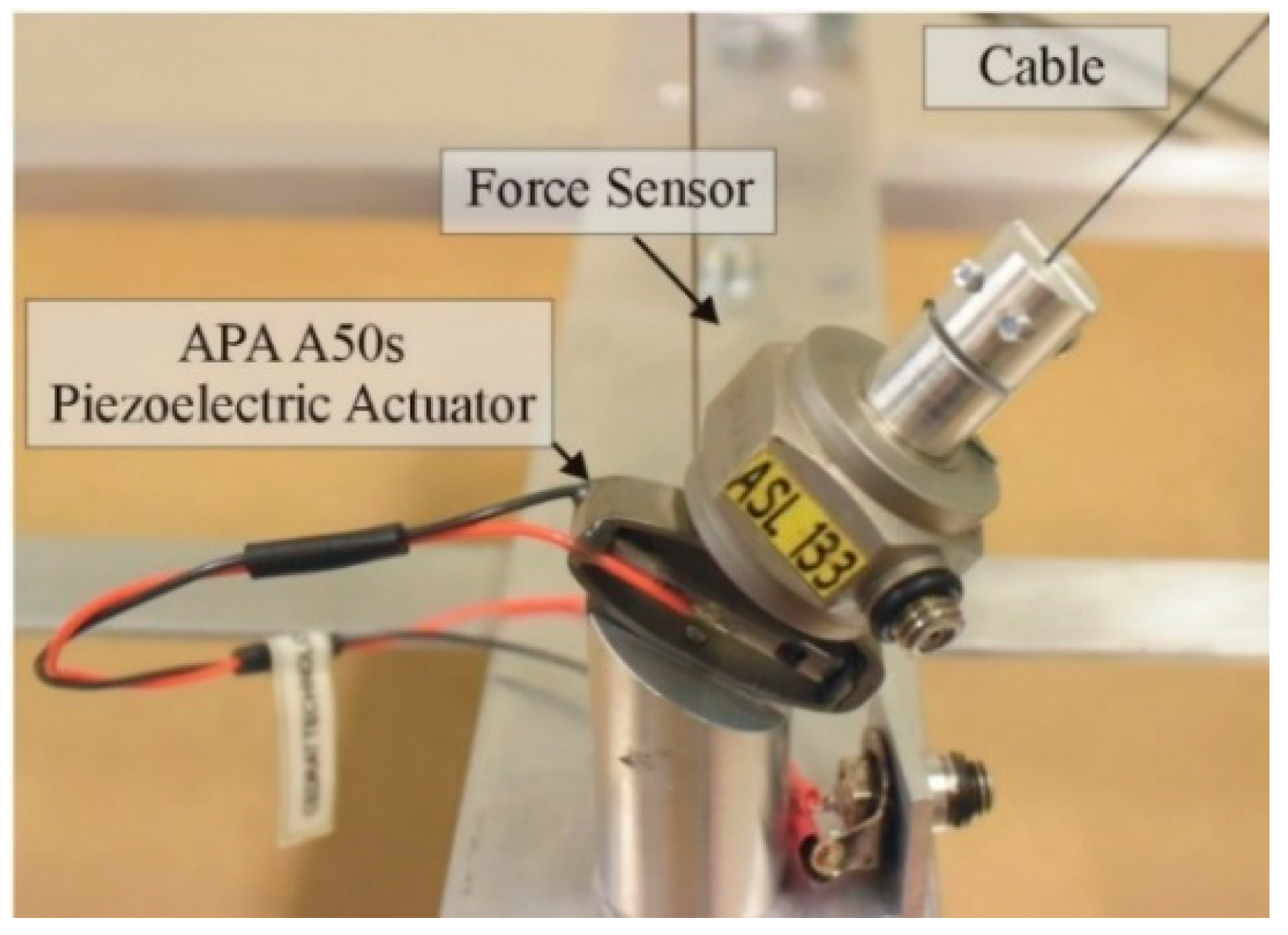
3.2. Active Cables
4. Experimental Implementation
4.1. Damage Detection with a Single Active Cable Drive: Scenarios A
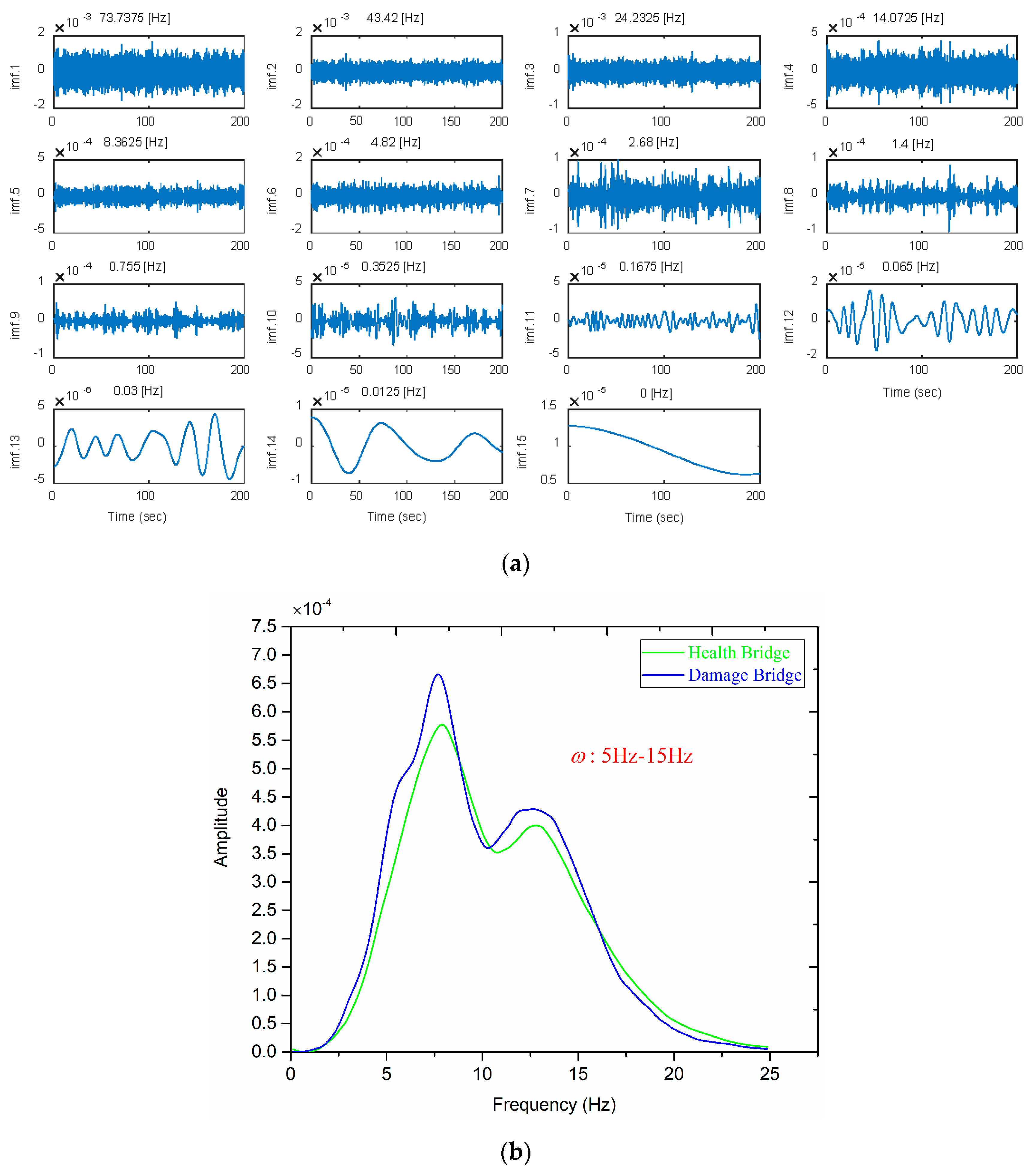
4.1.1. Intrinsic Mode Functions (IMFs)
4.1.2. Instantaneous Frequency Range (ω1, ω2)
4.1.3. Effect of Signal Error
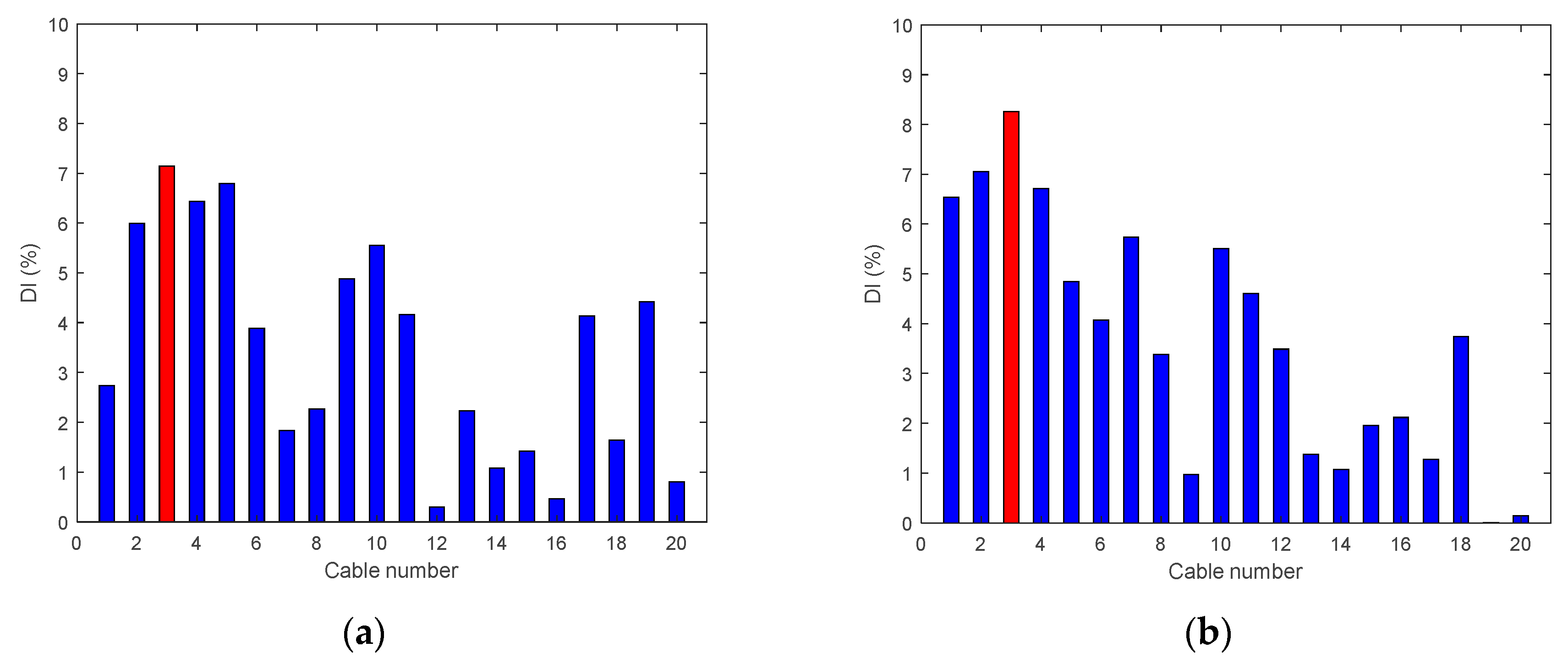
4.1.4. Results and Discussion
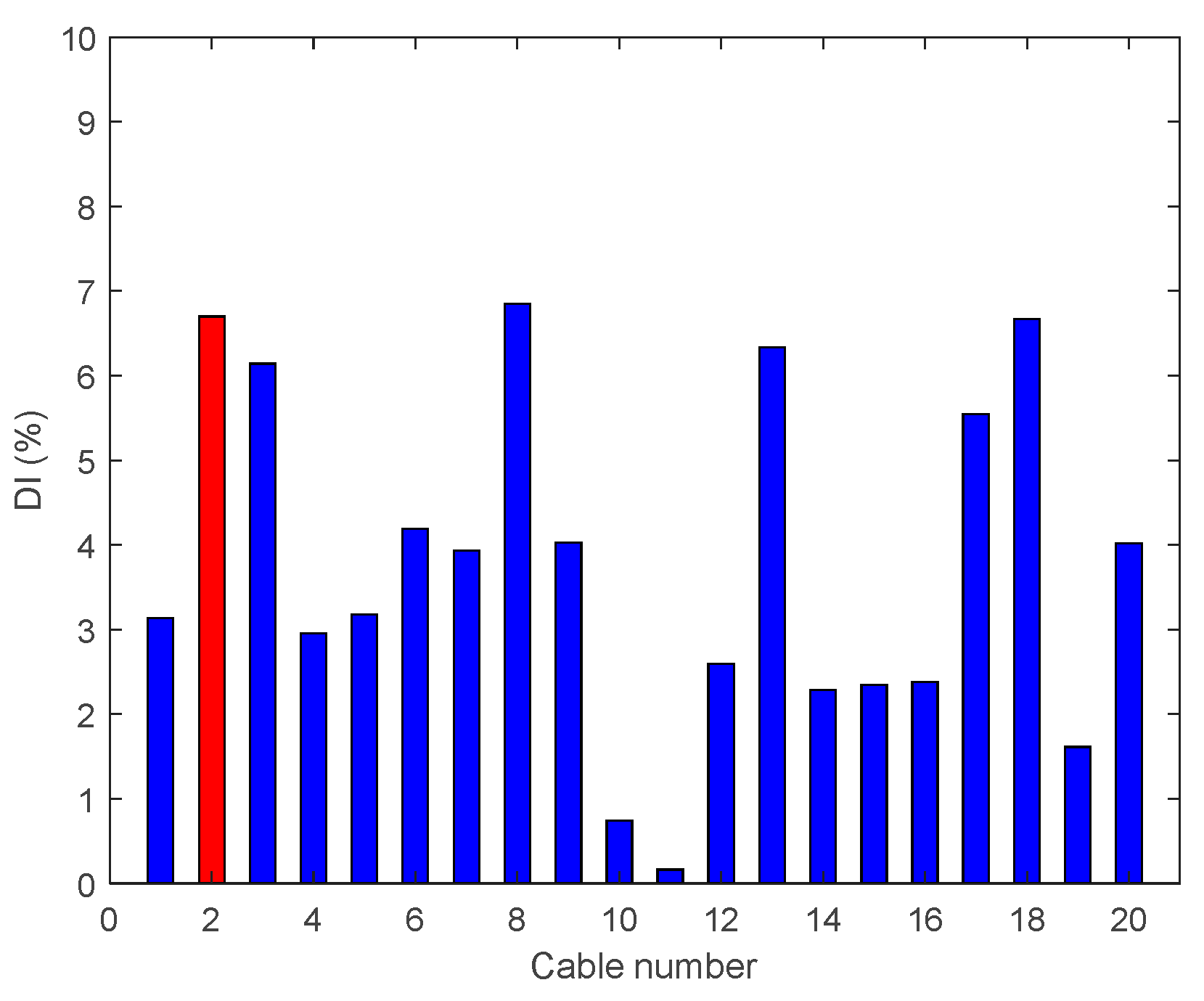
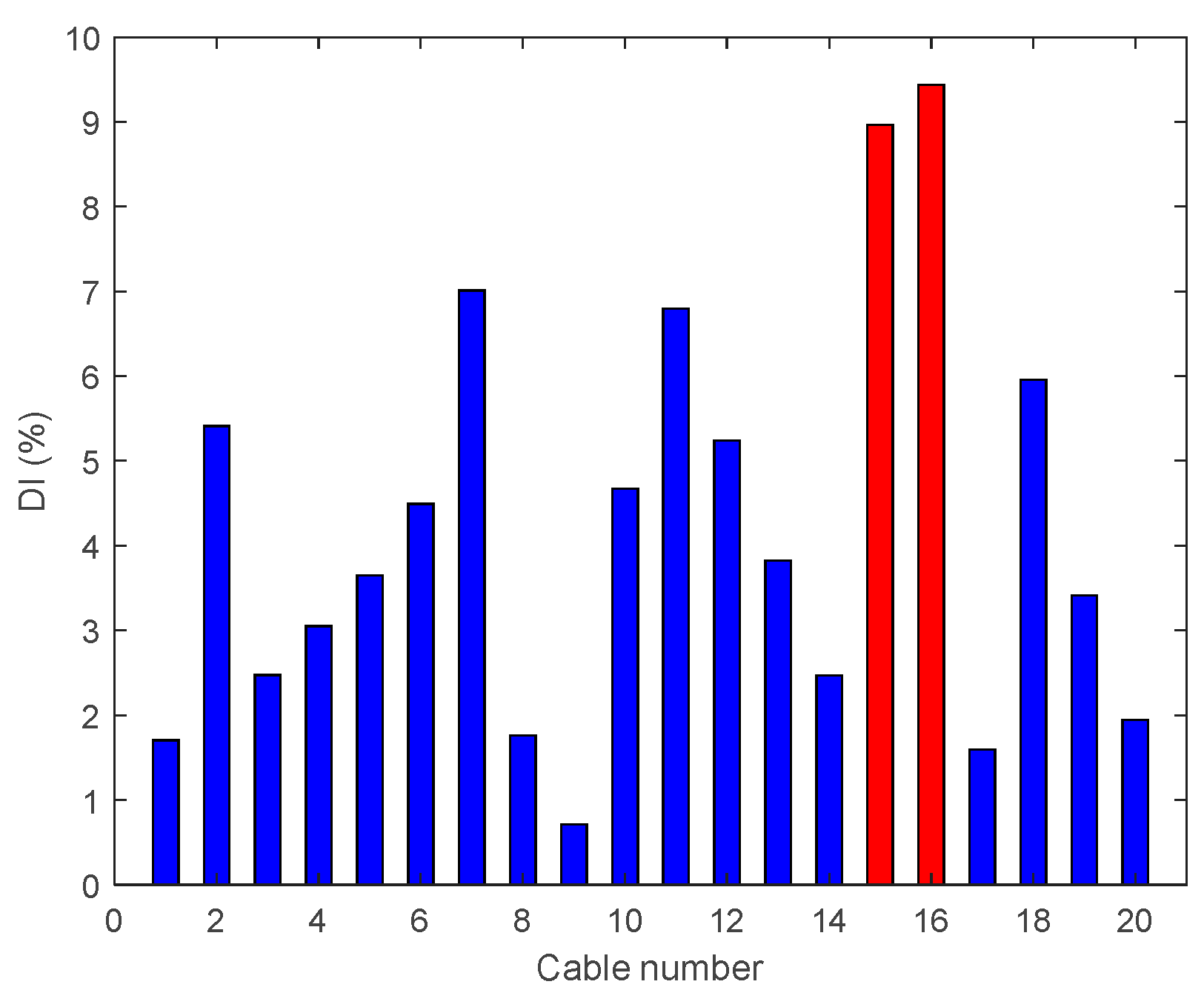
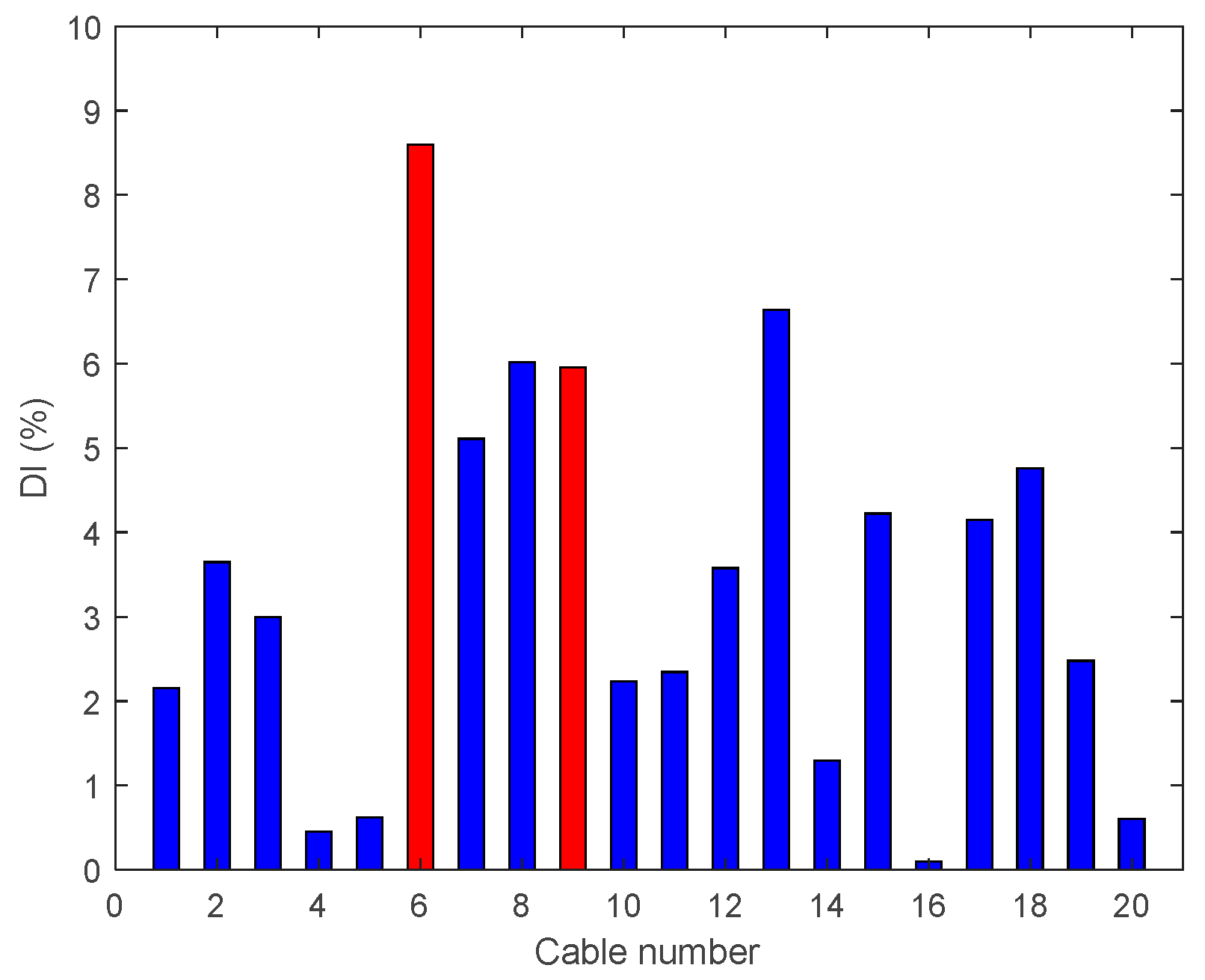
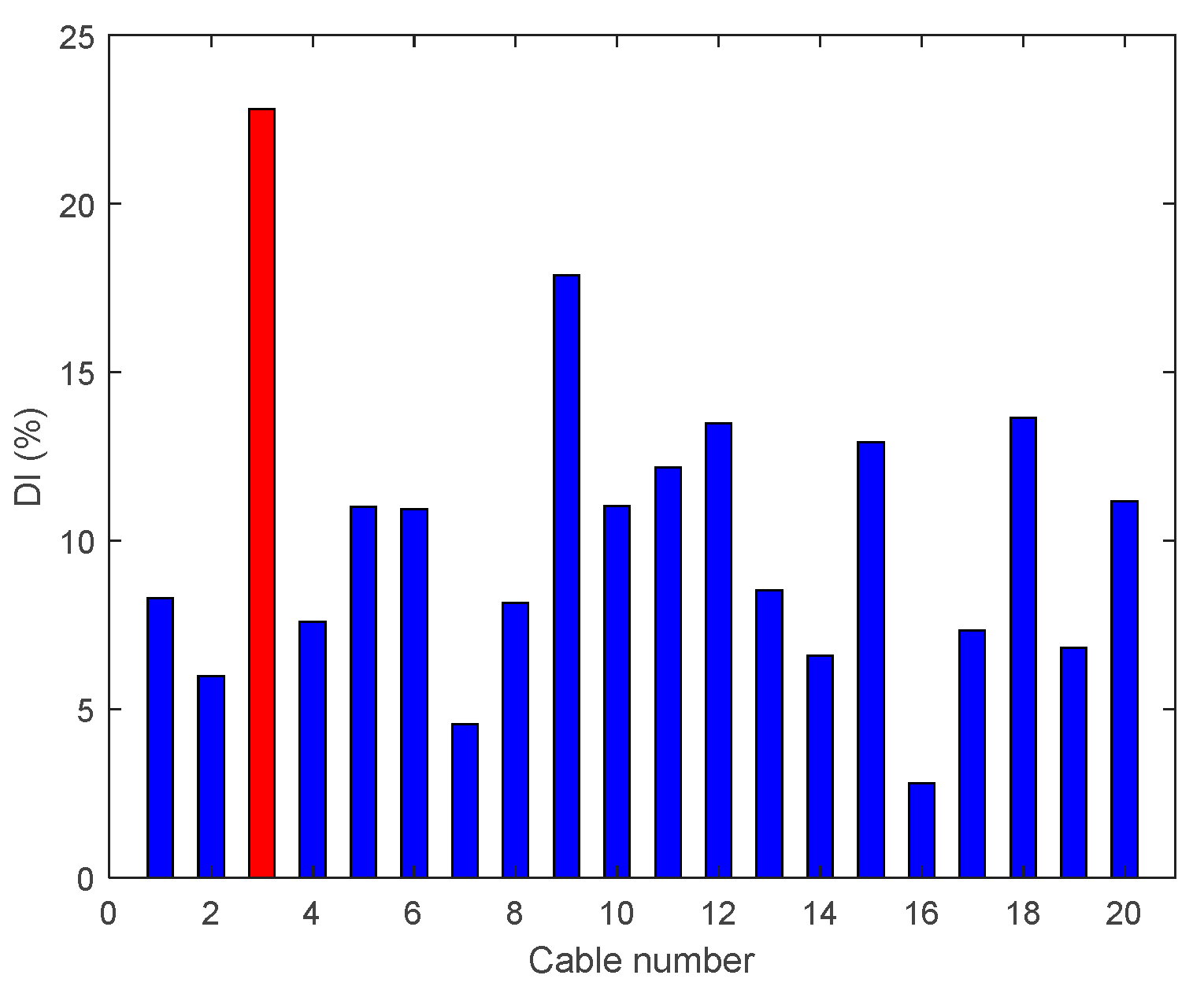
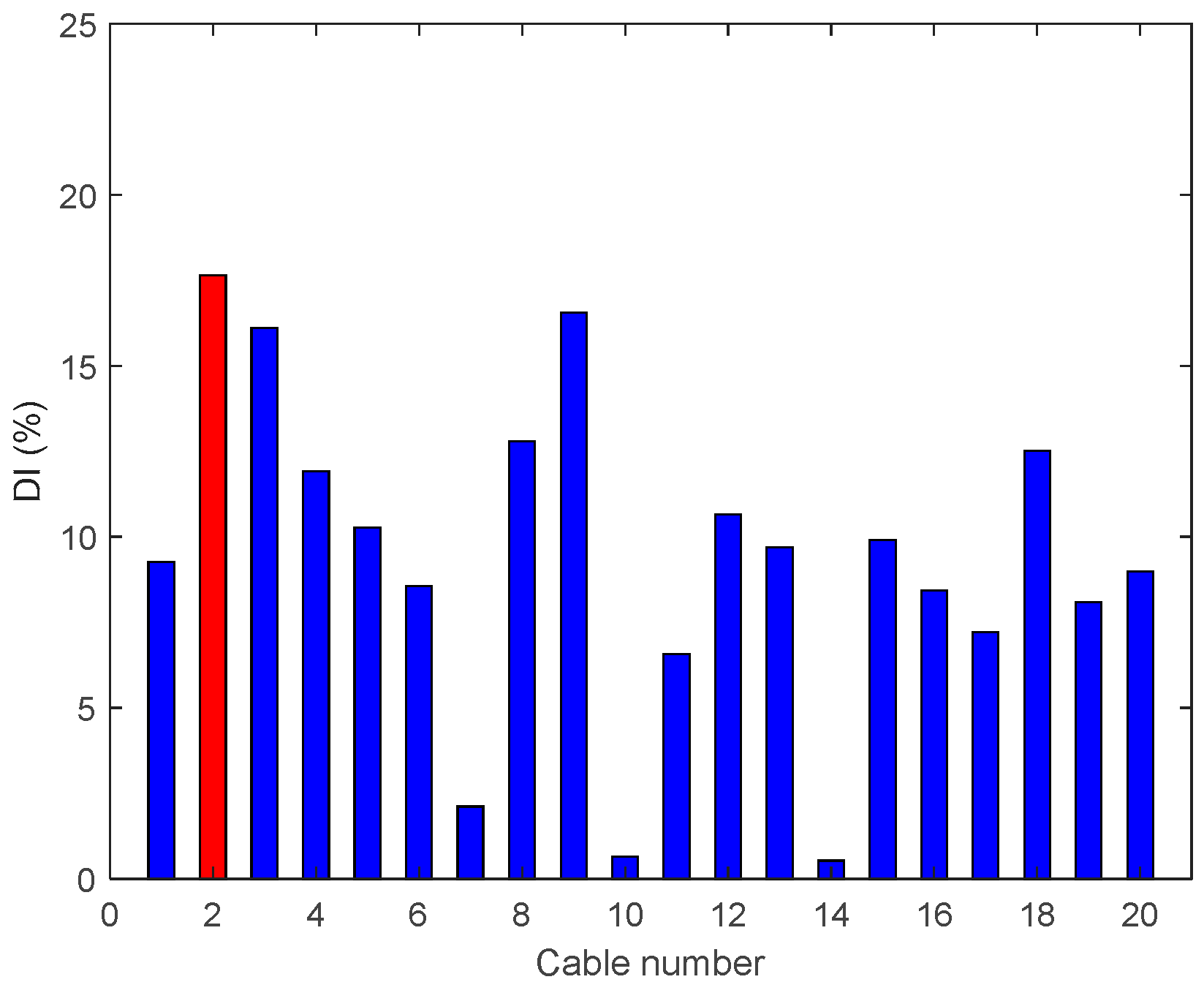
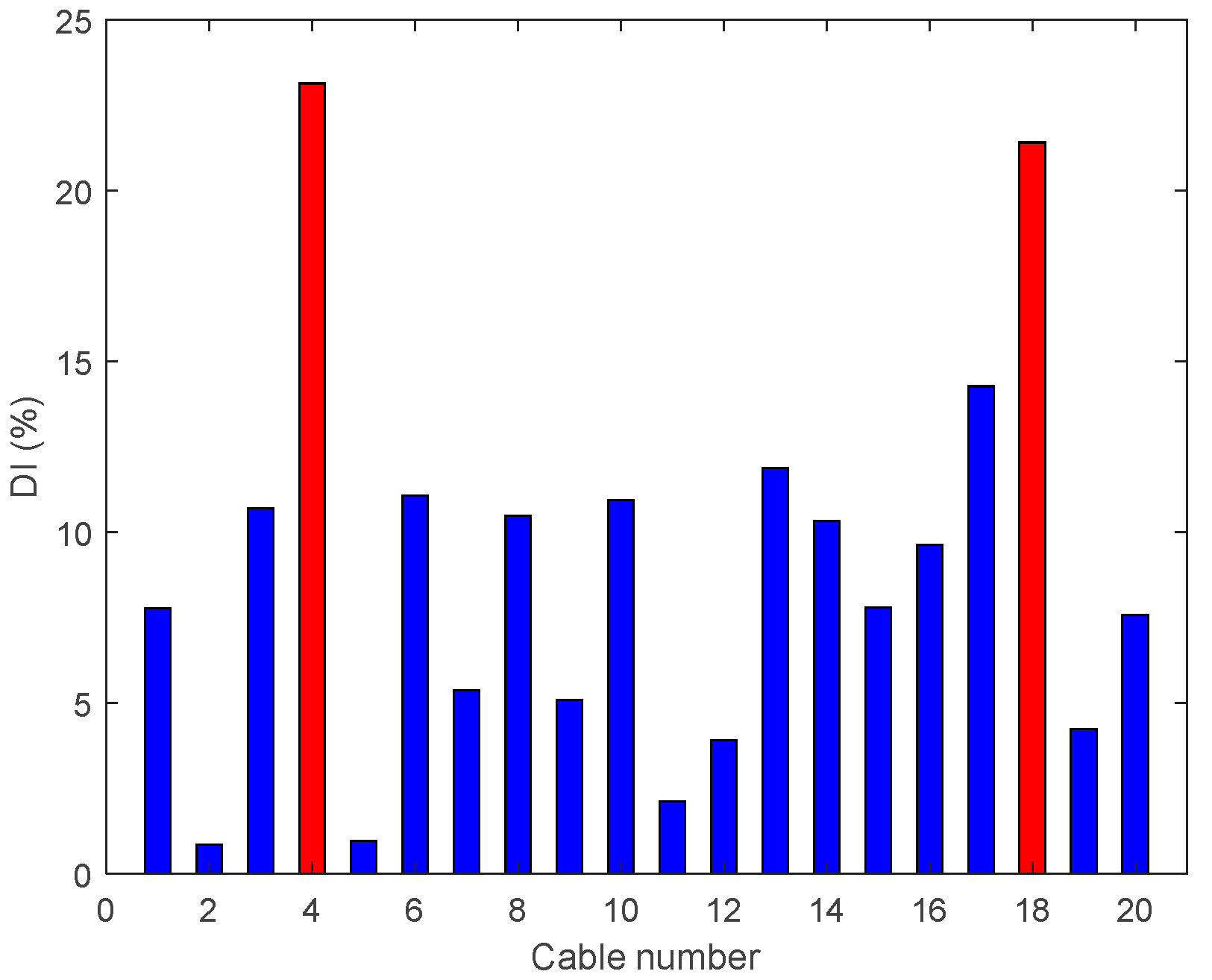
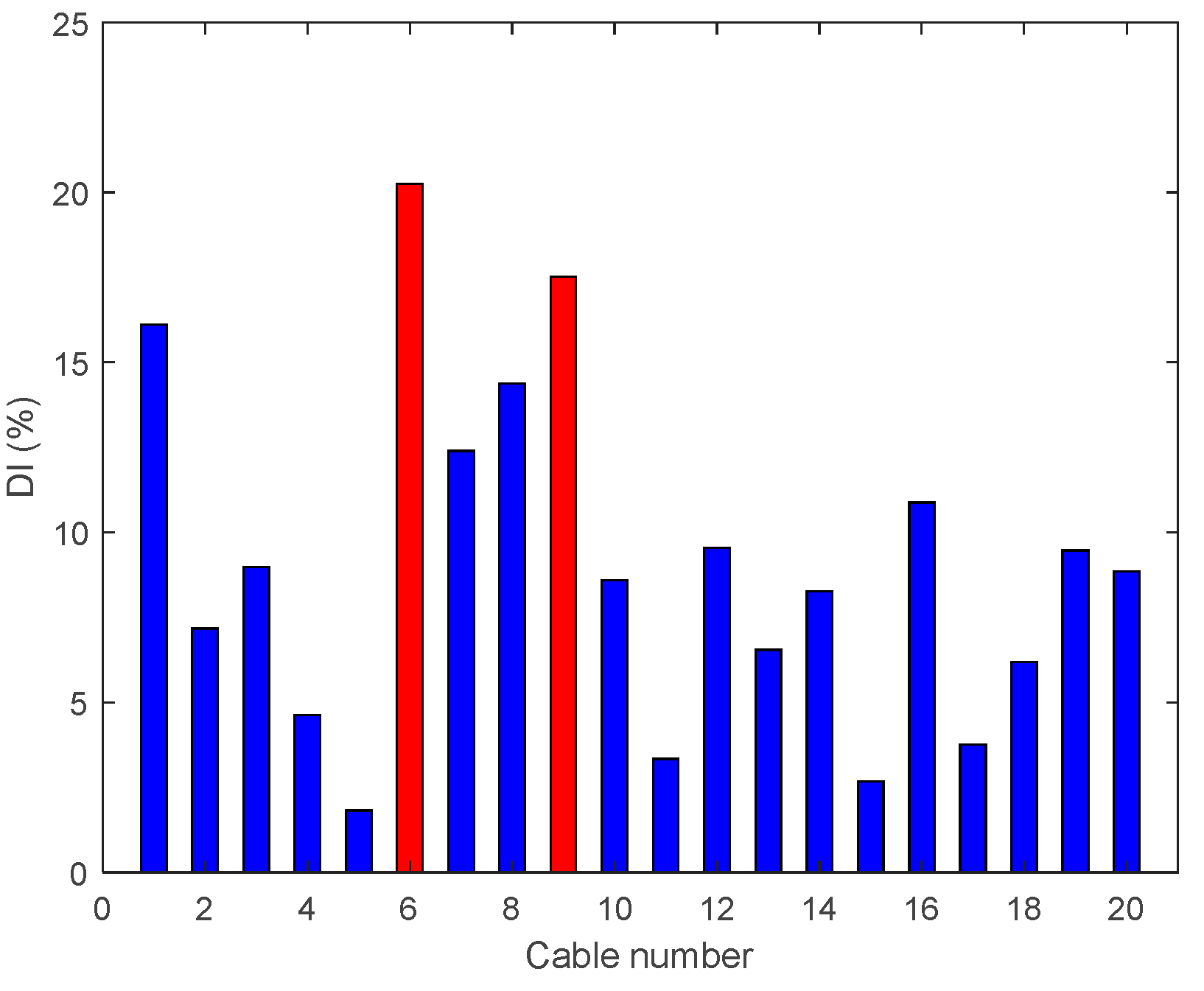
4.2. Damage Detection with Multiple Active Cables Drive: Scenarios B
4.3. Comparison with Traditional Methods
5. Conclusions
- The active cable drive is an effective way to excite the suspension bridge. Combined with Hilbert–Huang transform (HHT), a damage index () is constructed for damage detection of suspension bridge hangers. The proposed damage index () showed promising damage detection capability.
- The hybrid drive with multiple active cables can improve significantly the damage detection capability and is able to detect single and multiples damages with small modal amplitudes. For the 80% damage level near the mid-span, the performance of the enhanced is superior to the traditional modal parameters-based damage detection methods (COMAC, ECOMAC, MSC, MSE and MF). However, for some configurations, the enhanced damage index fails to detect damages, mainly for low-level damage.
- This paper validates the feasibility of the proposed method under laboratory conditions; however, some limitations are inevitable. Indeed, reducing the tension in the hangers is not representative of damage as it modifies only the lateral stiffness of the cable and does not affect its longitudinal stiffness, which significantly contributes to the deck vertical stiffness. Thus, a more representative damage scenario must be used to conclude on the quality of the algorithm (e.g., cutting slightly the cable).
- Finally, in this paper, we consider the influence of noise and ignored the influence of environmental and operational variability on the dynamic behavior. It is well known that suspension bridges are insensitive to tiny damages. Thus, a small damage intensity would be detectable by this method (equivalent to 80% reduction of the hanger tension), which is a satisfactory result. Nevertheless, to confirm these findings, the extension to field experiments under realistic conditions should be further investigated. More importantly, some quantitative results can be obtained. A potential test case would be the Seriate footbridge, located in Bergamo, Italy, and considered as a test case in a previous study [22].
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhou, Y.L.; Maia, N.M.; Sampaio, R.P.; Wahab, M.A. Structural damage detection using transmissibility together with hierarchical clustering analysis and similarity measure. Struct. Health Monit. 2017, 16, 711–731. [Google Scholar] [CrossRef]
- Figueiredo, E.; Park, G.; Farinholt, K.M.; Farrar, C.R.; Lee, J.R. Use of time-series predictive models for piezoelectric active-sensing in structural health monitoring applications. J. Vib. Acoust. 2012, 134, 041014. [Google Scholar] [CrossRef]
- Zhou, Y.L.; Figueiredo, E.; Maia, N.; Sampaio, R.; Perera, R. Damage detection in structures using a transmissibility-based Mahalanobis distance. Struct. Control Health Monit. 2015, 22, 1209–1222. [Google Scholar] [CrossRef]
- Ravanfar, S.A.; Razak, H.A.; Ismail, Z.; Monajemi, H. An improved method of parameter identification and damage detection in beam structures under flexural vibration using wavelet multi-resolution analysis. Sensors 2015, 15, 22750–22775. [Google Scholar] [CrossRef] [PubMed]
- Deraemaeker, A.; Reynders, E.; De Roeck, G.; Kullaa, J. Vibration-based structural health monitoring using output-only measurements under changing environment. Mech. Syst. Sig. Process. 2008, 22, 34–56. [Google Scholar]
- Alvandi, A.; Cremona, C. Assessment of vibration-based damage identification techniques. J. Sound Vib. 2006, 292, 179–202. [Google Scholar] [CrossRef]
- Zhou, Y.L.; Wahab, M.A. Damage detection using vibration data and dynamic transmissibility ensemble with auto-associative neural network. Mechanics 2017, 23, 688–695. [Google Scholar] [CrossRef]
- Blachowski, B.; An, Y.; Spencer, B.F., Jr.; Ou, J. Axial strain accelerations approach for damage localization in statically determinate truss structures. Comput.-Aided Civ. Infrastruct. Ing. 2017, 32, 304–318. [Google Scholar] [CrossRef]
- Reynders, E.; Pintelon, R.; De Roeck, G. Uncertainty bounds on modal parameters obtained from stochastic subspace identification. Mech. Syst. Sig. Process. 2008, 22, 948–969. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, X.; Wang, X.; Dong, L.; Qian, Y. Deployment of a smart structural health monitoring system for long-span arch bridges: A review and a case study. Sensors 2017, 17, 2151. [Google Scholar] [CrossRef] [PubMed]
- Peeters, B.; De Roeck, G. Stochastic system identification for operational modal analysis: A review. J. Dyn. Syst. Meas. Contr. 2001, 123, 659–667. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Reference-based stochastic subspace identification for output-only modal analysis. Mech. Syst. Sig. Process. 1999, 13, 855–878. [Google Scholar] [CrossRef]
- Sadhu, A.; Narasimhan, S.; Antoni, J. A review of output-only structural mode identification literature employing blind source separation methods. Mech. Syst. Sig. Process. 2017, 94, 415–431. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.; Zhou, Y.L.; Kang, J. Dynamic model updating for bridge structures using the kriging model and PSO algorithm ensemble with higher vibration modes. Sensors 2018, 18, 1879. [Google Scholar] [CrossRef] [PubMed]
- Siringoringo, D.M.; Fujino, Y. System identification of suspension bridge from ambient vibration response. Eng. Struct. 2008, 30, 462–477. [Google Scholar] [CrossRef]
- Peeters, B.; Ventura, C.E. Comparative study of modal analysis techniques for bridge dynamic characteristics. Mech. Syst. Sig. Process. 2003, 17, 965–988. [Google Scholar] [CrossRef]
- Catbas, F.N.; Gul, M.; Burkett, J.L. Conceptual damage-sensitive features for structural health monitoring: Laboratory and field demonstrations. Mech. Syst. Sig. Process. 2008, 22, 1650–1669. [Google Scholar] [CrossRef]
- Xu, K.; Ren, C.; Deng, Q.; Jin, Q.; Chen, X. Real-time monitoring of bond slip between GFRP bar and concrete structure using piezoceramic transducer-enabled active sensing. Sensors 2018, 18, 2653. [Google Scholar] [CrossRef] [PubMed]
- Rafiei, M.H.; Adeli, H. A novel unsupervised deep learning model for global and local health condition assessment of structures. Eng. Struct. 2018, 156, 598–607. [Google Scholar] [CrossRef]
- Amezquita-Sanchez, J.P.; Adeli, H. Synchrosqueezed wavelet transform-fractality model for locating, detecting, and quantifying damage in smart highrise building structures. Smart Mater. Struct. 2015, 24, 065034. [Google Scholar] [CrossRef]
- Shen, W.; Li, D.; Zhang, S.; Ou, J. Analysis of wave motion in one-dimensional structures through fast-Fourier-transform-based wavelet finite element method. J. Sound Vib. 2017, 400, 369–386. [Google Scholar] [CrossRef]
- Preumont, A.; Voltan, M.; Sangiovanni, A.; Mokrani, B.; Alaluf, D. Active tendon control of suspension bridges. Smart Struct. Syst. 2016, 18, 31–52. [Google Scholar] [CrossRef]
- Tian, Z.; Mokrani, B.; Alaluf, D.; Jiang, J.; Preumont, A. Active tendon control of suspension bridges: study on the active cables configuration. Smart Struct. Syst. 2017, 19, 463–472. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X. Hilbert-Huang transform-based vibration signal analysis for machine health monitoring. IEEE Trans. Instrum. Meas. 2006, 55, 2320–2329. [Google Scholar] [CrossRef]
- Liu, B.; Riemenschneider, S.; Xu, Y. Gearbox fault diagnosis using empirical mode decomposition and Hilbert spectrum. Mech. Syst. Sig. Process. 2006, 20, 718–734. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Sig. Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Yu, X.; Ding, E.; Chen, C.; Liu, X.; Li, L. A novel characteristic frequency bands extraction method for automatic bearing fault diagnosis based on Hilbert Huang transform. Sensors 2015, 15, 27869–27893. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Perez, A.; Amezquita-Sanchez, J.P.; Dominguez-Gonzalez, A.; Sedaghati, R.; Osornio-Rios, R.; Romero-Troncoso, R.J. Fused empirical mode decomposition and wavelets for locating combined damage in a truss-type structure through vibration analysis. J. Zhejiang Univ. SCI A 2013, 14, 615–630. [Google Scholar] [CrossRef]
- Huang, N.E. Hilbert-Huang Transform and Its Applications, 2nd ed.; World Scientific Publishing Co. Pte. Ltd.: London, UK, 2014; pp. 1–25. ISBN 978-981-4508-23-0. [Google Scholar]
- Huang, N.E.; Wu, Z. A review on Hilbert-Huang transform: Method and its applications to geophysical studies. Rev. Geophys. 2008, 46, 1–23. [Google Scholar] [CrossRef]
- Ibrahim, S.R.; Mikulcik, E.C. A method for the direct identification of vibration parameter from the free responses. Shock Vib. Bull. 1977, 4, 183–198. [Google Scholar]
- Juang, J.N.; Pappa, R.S. An eigensystem realization algorithm for modal parameter identification and model reduction. J. Guid. Control Dyn. 1985, 8, 620–627. [Google Scholar] [CrossRef]
- Farrar, C.R.; James, G.H., III. System identification from ambient vibration measurements on a bridge. J. Sound Vib. 1997, 205, 1–18. [Google Scholar] [CrossRef]
- Van Overschee, P.; Moor, B.L. Subspace Identification for the Linear Systems: Theory-Implementation-Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1996; ISBN 978-1-4613-0465-4. [Google Scholar]
- Santamaria, I. Handbook of Blind Source Separation: Independent Component Analysis and Applications. IEEE Signal Process. Mag. 2013, 30, 133–134. [Google Scholar] [CrossRef]
- Antoni, J. Blind separation of vibration components: Principles and demonstrations. Mech. Syst. Sig. Process. 2005, 19, 1166–1180. [Google Scholar] [CrossRef]
- Musafere, F.; Sadhu, A.; Liu, K. Towards damage detection using blind source separation integrated with time-varying auto-regressive modeling. Smart Mater. Struct. 2015, 25, 015013. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Achkire, Y.; Preumont, A. Optical measurement of cable and string vibration. Shock Vib. 1998, 5, 171–179. [Google Scholar] [CrossRef]
- Wickramasinghe, W.R.; Thambiratnam, D.P.; Chan, T.H.; Nguyen, T. Vibration characteristics and damage detection in a suspension bridge. J. Sound Vib. 2016, 375, 254–274. [Google Scholar] [CrossRef]
- Cantieni, R. Experimental methods used in system identification of civil engineering structures. In Proceedings of the International Operational Modal Analysis Conference (IOMAC), Copenhagen, Denmark, 26–27 April 2005; pp. 249–260. [Google Scholar]
- Farrar, C.R.; Doebling, S.W.; Cornwell, P.J.; Straser, E.G. Variability of modal parameters measured on the Alamosa Canyon Bridge. In Proceedings of the International Modal Analysis Conference, Orlando, FL, USA, 3–6 February 1997. [Google Scholar]
- Doebling, S.W.; Farrar, C.R.; Goodman, R.S. Effects of measurement statistics on the detection of damage in the Alamosa Canyon Bridge. Proc. SPIE 1996, 3089, 919–929. [Google Scholar]
- Wahab, M.A.; De Roeck, G. Damage detection in bridges using modal curvatures: Application to a real damage scenario. J. Sound Vib. 1999, 226, 217–235. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Zhou, H.F.; Chan, K.C.; Ko, J.M. Modal Flexibility Analysis of Cable-Stayed Ting Kau Bridge for Damage Identification. Comput.-Aided Civ. Infrastruct. Ing. 2008, 23, 223–236. [Google Scholar] [CrossRef]
- Pandey, A.K.; Biswas, M.; Samman, M.M. Damage detection from changes in curvature mode shapes. J. Sound Vib. 1991, 145, 321–332. [Google Scholar] [CrossRef]
- Li, H.; Yang, H.; Hu, S.L.J. Modal strain energy decomposition method for damage localization in 3D frame structures. J. Eng. Mech. 2006, 132, 941–951. [Google Scholar] [CrossRef]
- Pandey, A.K.; Biswas, M. Damage detection in structures using changes in flexibility. J. Sound Vib. 1994, 169, 3–17. [Google Scholar] [CrossRef]
- Meng, F.H.; Yu, J.J.; Alaluf, D.; Mokrani, B.; Preumont, A. Modal analysis and damage detection for suspension bridges: A numerical and experimental investigation. Smart Struct. Syst. accepted (under final review).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Damage Case | Location | Severity of Damage (Tension Reduction) |
|---|---|---|
| Single damage scenario | ||
| Case A1 | Cable 5 | 50% |
| Case A2 | Cable 5 | 95% |
| Case A3 | Cable 3 | 50% |
| Case A4 | Cable 3 | 95% |
| Case A5 | Cable 2 | 95% |
| Multiple damage scenario | ||
| Case A6 | Cable 15 and Cable 16 | 95% |
| Case A7 | Cable 4 and Cable 18 | 95% |
| Case A8 | Cable 6 and Cable 9 | 95% |
| Damage Case | Location | Severity of Damage (Tension Reduction) |
|---|---|---|
| Single damage scenario | ||
| Case B1 | Cable 3 | 95% |
| Case B2 | Cable 3 | 80% |
| Case B3 | Cable 3 | 50% |
| Case B4 | Cable 2 | 90% |
| Case B5 | Cable 2 | 80% |
| Multiple damage scenario | ||
| Case B6 | Cable 4 and Cable 18 | 80% |
| Case B7 | Cable 6 and Cable 9 | 80% |
| Case # | COMAC | ECOMAC | MSC | MSE | MF | Enhanced DIv |
|---|---|---|---|---|---|---|
| B1 | X | X | OO | O | O | O |
| B2 | X | X | OO | OO | OO | O |
| B4 | X | X | X | X | O | O |
| B6 | X | OO | X | OO | OO | O |
| B7 | X | OO | OO | OO | OO | OO |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, F.; Mokrani, B.; Alaluf, D.; Yu, J.; Preumont, A. Damage Detection in Active Suspension Bridges: An Experimental Investigation. Sensors 2018, 18, 3002. https://doi.org/10.3390/s18093002
Meng F, Mokrani B, Alaluf D, Yu J, Preumont A. Damage Detection in Active Suspension Bridges: An Experimental Investigation. Sensors. 2018; 18(9):3002. https://doi.org/10.3390/s18093002
Chicago/Turabian StyleMeng, Fanhao, Bilal Mokrani, David Alaluf, Jingjun Yu, and André Preumont. 2018. "Damage Detection in Active Suspension Bridges: An Experimental Investigation" Sensors 18, no. 9: 3002. https://doi.org/10.3390/s18093002
APA StyleMeng, F., Mokrani, B., Alaluf, D., Yu, J., & Preumont, A. (2018). Damage Detection in Active Suspension Bridges: An Experimental Investigation. Sensors, 18(9), 3002. https://doi.org/10.3390/s18093002