Modeling and Performance of the IEEE 802.11p Broadcasting for Intra-Platoon Communication

Abstract
1. Introduction
- Firstly, we establish a communication model of intra-platoon communication in a single platoon scenario. The intra-vehicle communication process is divided into two part: back-off process of channel competition for transmitting control messages and queuing process of packets in buffers. The back-off process of broadcasting is modeled using a 1-D Markov chain and the queuing process is established exploiting M/G/1/K queuing theory.
- Secondly, we consider an unsaturated and imperfect condition in our analytical model. The theoretical solution of packet delay and packet dropping rate are derived considering different factors together, including the imperfect wireless channels, various platoon size, distribution of packet generation rate.
- Thirdly, results have been provided in a single platoon scenario under a wide range of settings. The accuracy of the analytical model is evaluated. The impacts of bit error rate, packet generation rate, and platoon size on the intra-vehicle communication performance are investigated. The effect of intra-platoon communication performance on the stability of platoon is discussed.
2. Related Works
3. Platoon System
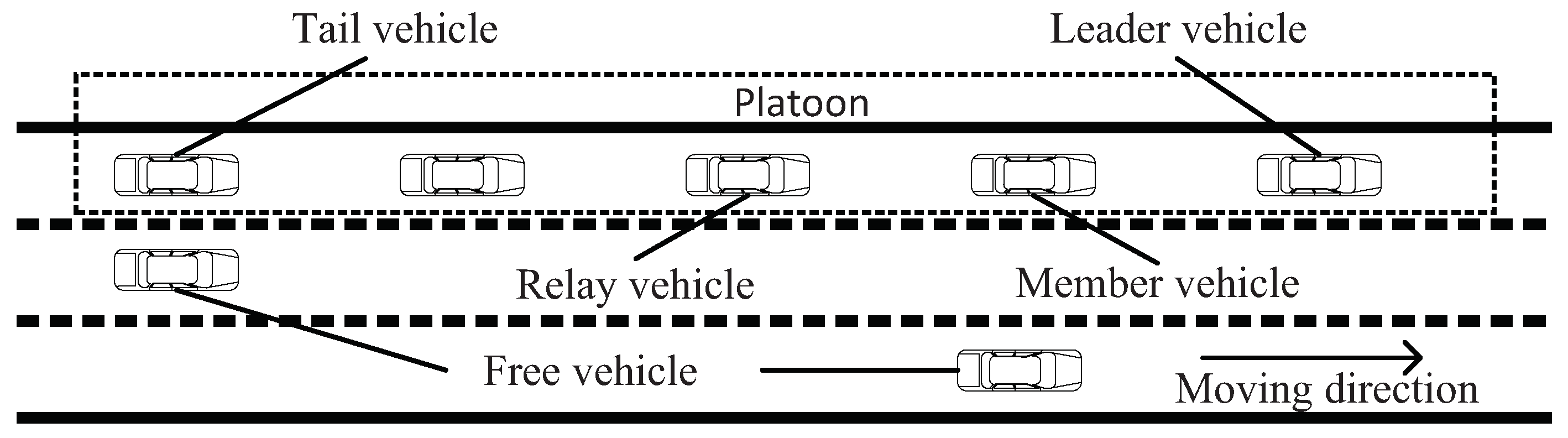
3.1. Platoon Structure Model
- (1)
- Leader vehicle: It refers to the first vehicle in a platoon. A leader vehicle is responsible for establishing and administering the platoon with the coordinate of Advanced Traffic Management System, e.g., controlling driving behavior of the vehicle in a platoon, collecting data from other vehicles on the road, and identifying and broadcasting the information of platoon. The movement of the leader vehicle is the reference movement for all remaining vehicles in the platoon to follow.
- (2)
- Tail vehicle: It locates at the end of a platoon. The tail vehicle is an essential hub for inter-platoon communication and is responsible for establishing a connection with the next platoon.
- (3)
- Member vehicle: It is a vehicle within the platoon that locates neither at the begin nor the end of a platoon. A member vehicle following a specified control algorithm receives messages from the leader vehicle and its preceding vehicle.
- (4)
- Relay vehicle: Any member vehicles in a platoon can act as a relay vehicle, which is in charge of assisting leader vehicle in disseminating messages to all vehicles in a platoon.
- (5)
- Free vehicle: Vehicles that do not belong to any platoon are called free vehicles. A free vehicle sends a request to the leader vehicle of a platoon when it wants to join a platoon. After obtaining the permission of the leader vehicle, the free vehicle can perform join operation.
3.2. Vehicle Control Model
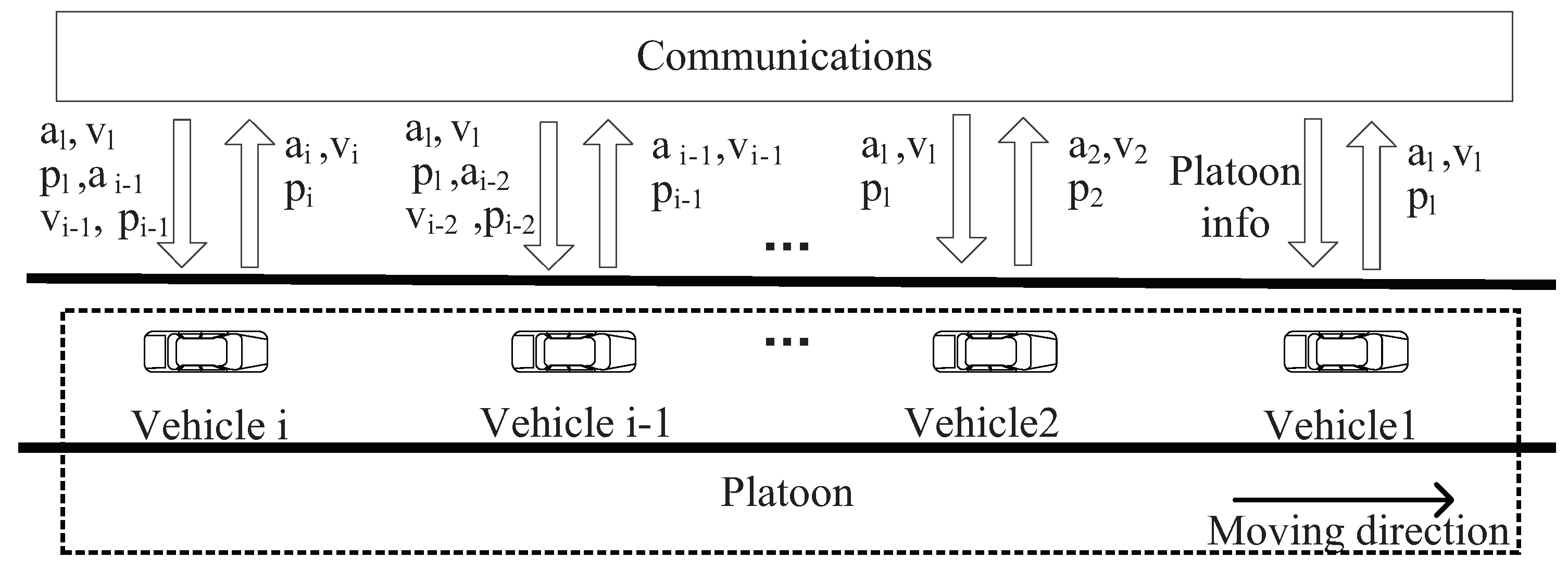
3.3. Communication Model
4. Analytical Model
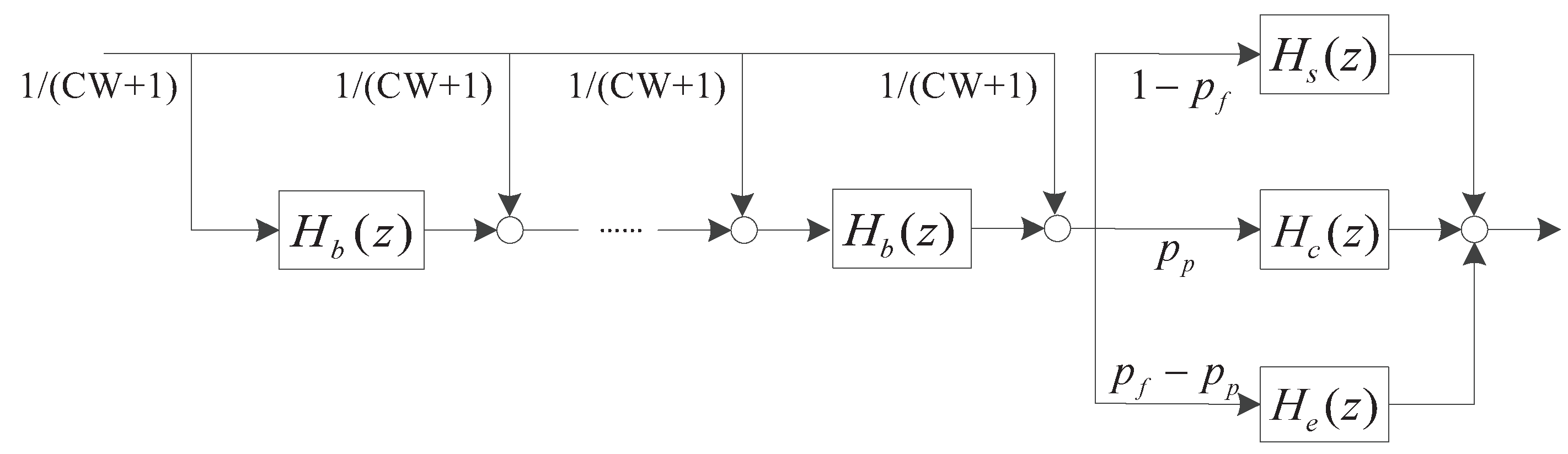
4.1. Intra-Platoon Back-Off Process
4.2. MAC Layer Queuing Process Model
4.3. Performance Measures
5. Simulations Verification
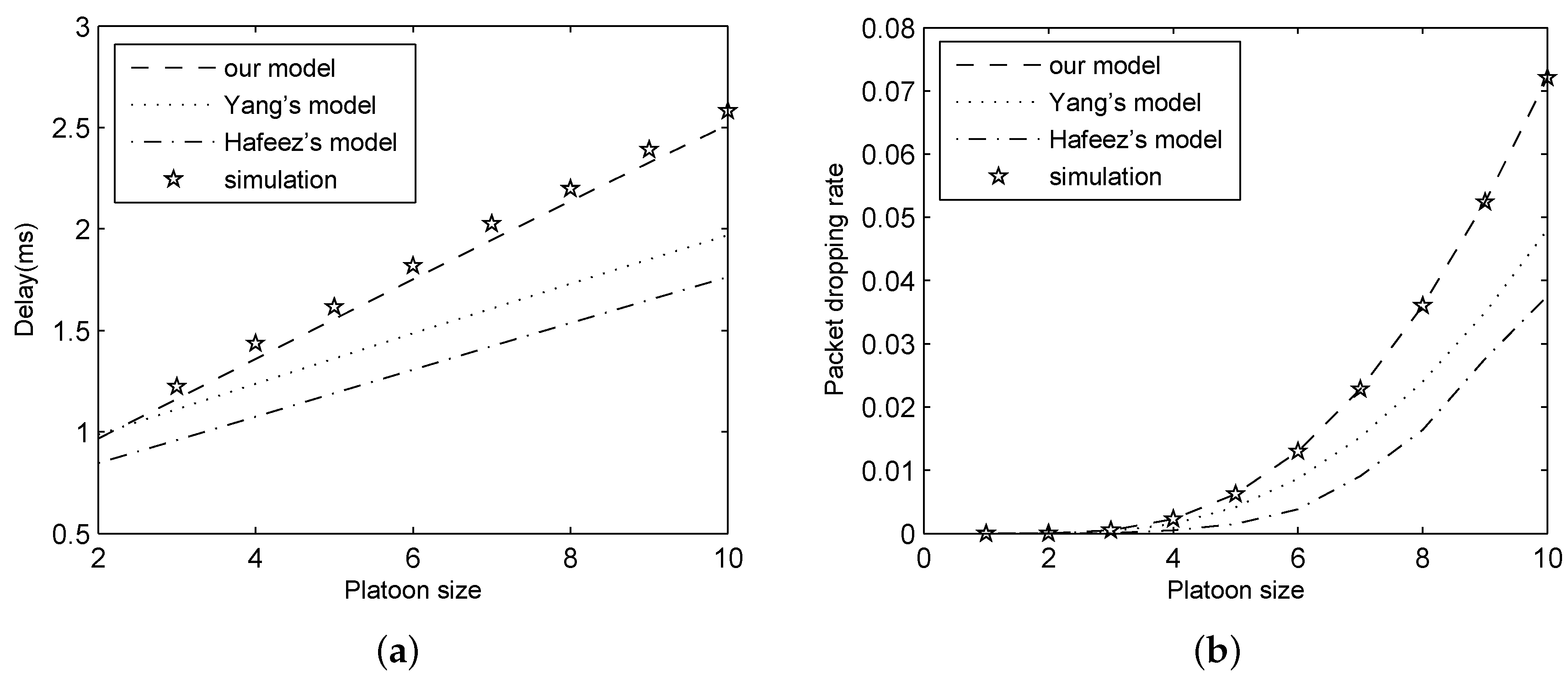
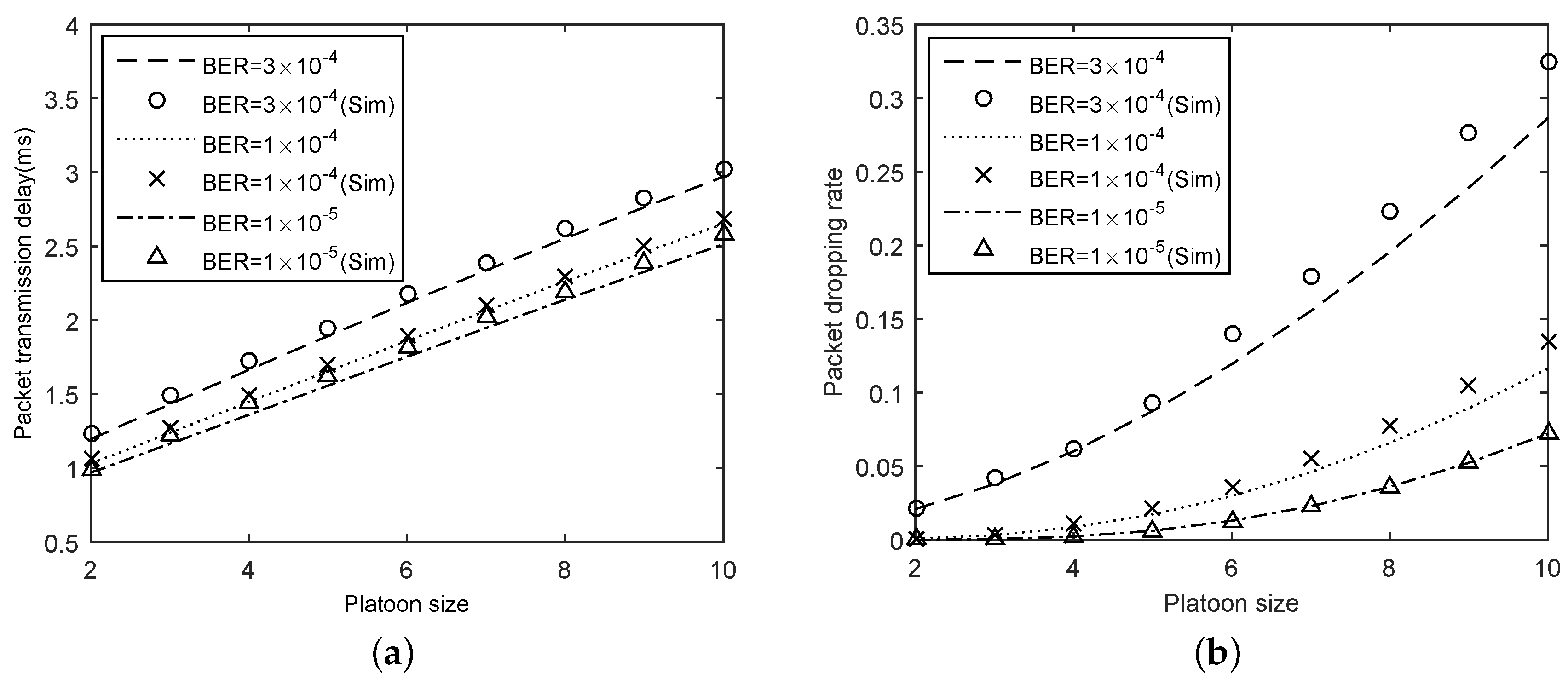
5.1. Model Verification
5.2. The Effect of Bit Error Rate
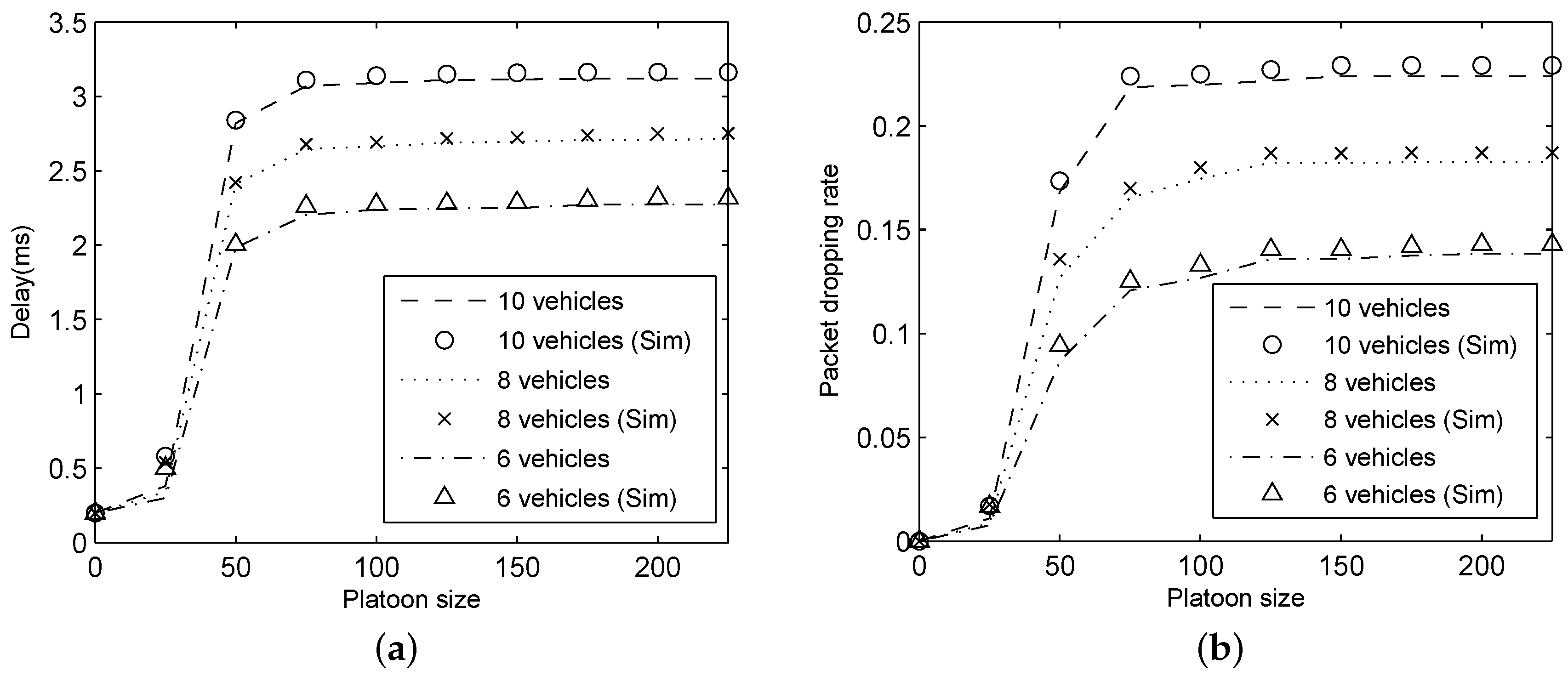
5.3. The Effect of Packet Arrival Rate
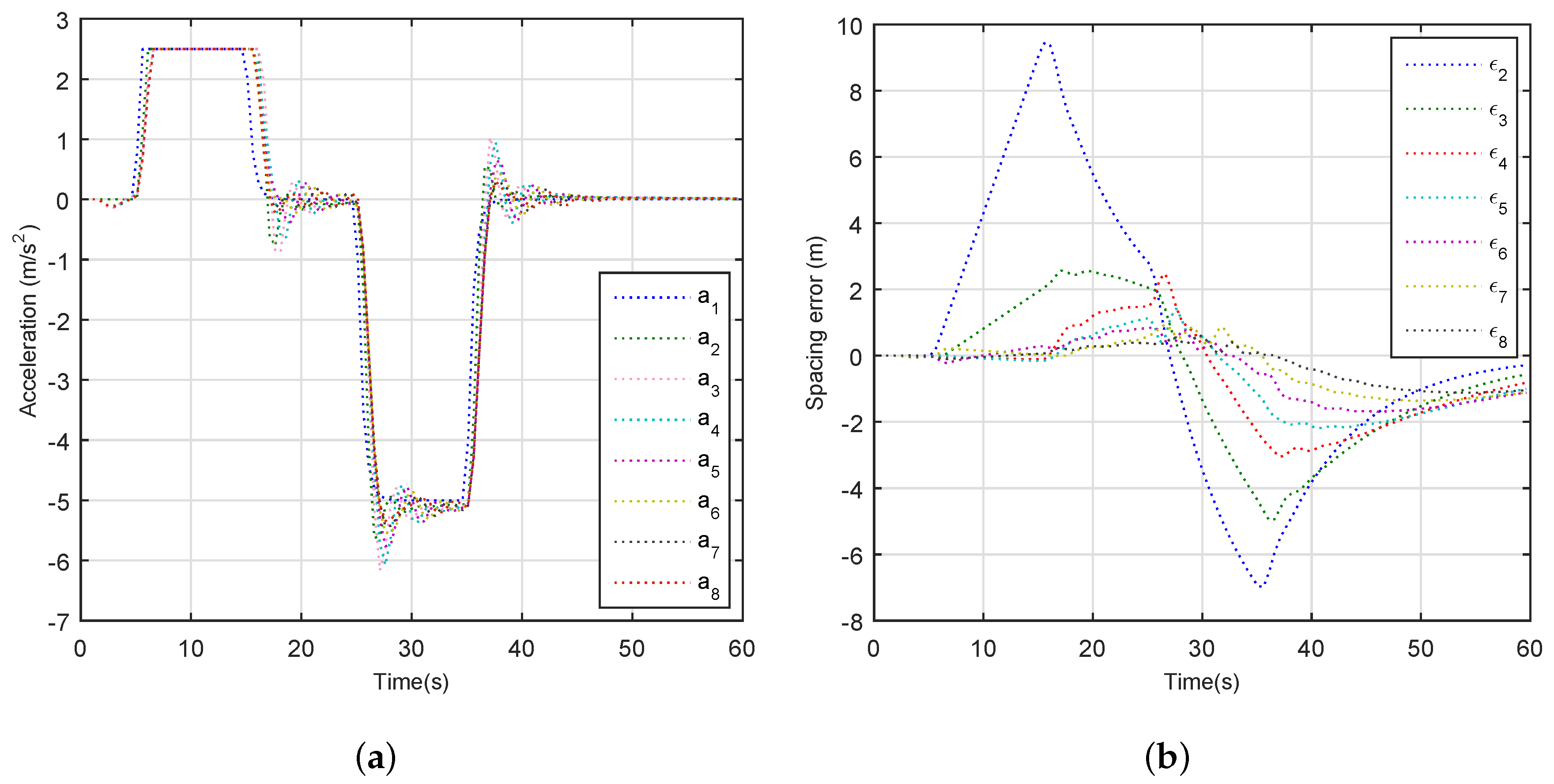
5.4. The Stability of Platoon
5.5. Simulations Summary
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Arem, B.V.; Driel, C.J.G.V.; Visser, R. The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef]
- Hu, H.; Lu, R.; Zhang, Z.; Shao, J. REPLACE: A reliable trust-based platoon service recommendation scheme in VANET. IEEE Trans. Veh. Technol. 2017, 66, 1786–1797. [Google Scholar] [CrossRef]
- Amoozadeh, M.; Deng, H.; Chuah, C.N.; Zhang, H.M.; Ghosal, D. Platoon management with cooperative adaptive cruise control enabled by VANET. Veh. Commun. 2015, 2, 110–123. [Google Scholar] [CrossRef]
- Jia, D.; Lu, K.; Wang, J.; Zhang, X.; Shen, X. A survey on platoon-based vehicular cyber-physical systems. IEEE Commun. Surv. Tutor. 2016, 18, 263–284. [Google Scholar] [CrossRef]
- Dai, S.L.; He, S.; Lin, H.; Wang, C. Platoon Formation Control With Prescribed Performance Guarantees for USVs. IEEE Trans. Ind. Electron. 2018, 65, 4237–4246. [Google Scholar] [CrossRef]
- Zhu, J.; Huang, C.; Fan, X.; Guo, S.; Fu, B. EDDA: An efficient distributed data replication algorithm in VANETs. Sensors 2018, 18, 547. [Google Scholar] [CrossRef] [PubMed]
- Nardini, G.; Virdis, A.; Campolo, C.; Molinaro, A.; Stea, G. Cellular-V2X Communications for Platooning: Design and Evaluation. Sensors 2018, 18, 1527. [Google Scholar] [CrossRef] [PubMed]
- Al-Kharasani, N.M.; Zulkarnain, Z.A.; Subramaniam, S.; Hanapi, Z.M. An Efficient Framework Model for Optimizing Routing Performance in VANETs. Sensors 2018, 18, 597. [Google Scholar] [CrossRef] [PubMed]
- Hu, H.; Lu, R.; Huang, C.; Zhang, Z. Tripsense: A trust-based vehicular platoon crowdsensing scheme with privacy preservation in vanets. Sensors 2016, 16, 803. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Li, S.E.; Wang, J.; Cao, D.; Li, K. Stability and scalability of homogeneous vehicular platoon: Study on the influence of information flow topologies. IEEE Trans. Intell. Transp. Syst. 2016, 17, 14–26. [Google Scholar] [CrossRef]
- Jia, D.; Lu, K.; Wang, J. A disturbance-adaptive design for VANET-enabled vehicle platoon. IEEE Trans. Veh. Technol. 2014, 63, 527–539. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Multiplatooning leaders positioning and cooperative behavior algorithms of communicant automated vehicles for high traffic capacity. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1172–1187. [Google Scholar] [CrossRef]
- Kwon, J.W.; Chwa, D. Adaptive bidirectional platoon control using a coupled sliding mode control method. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2040–2048. [Google Scholar] [CrossRef]
- Xu, L.; Wang, L.Y.; Yin, G.; Zhang, H. Communication information structures and contents for enhanced safety of highway vehicle platoons. IEEE Trans. Veh. Technol. 2014, 63, 4206–4220. [Google Scholar] [CrossRef]
- Xiao, L.; Gao, F. Effect of information delay on string stability of platoon of automated vehicles under typical information frameworks. J. Central South Univ. Technol. 2010, 17, 1271–1278. [Google Scholar] [CrossRef]
- Lei, C.; Van, E.E.M.; Wolterink, W.K.; Karagiannis, G.; Heijenk, G.; Ploeg, J. Impact of packet loss on CACC string stability performance. In Proceedings of the 11th International Conference on ITS Telecommunications (ITST), St. Petersburg, Russia, 23–25 August 2011; pp. 381–386. [Google Scholar]
- Bergenhem, C.; Hedin, E.; Skarin, D. Vehicle-to-Vehicle Communication for a Platooning System. Procedia Soc. Behav. Sci. 2012, 48, 1222–1233. [Google Scholar] [CrossRef]
- Ploeg, J.; Shukla, D.P.; Wouw, N.V.D.; Nijmeijer, H. Controller synthesis for string stability of vehicle platoons. IEEE Trans. Intell. Transp. Syst. 2014, 15, 854–865. [Google Scholar] [CrossRef]
- Guo, G.; Wen, S. Communication scheduling and control of a platoon of vehicles in VANETs. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1551–1563. [Google Scholar] [CrossRef]
- Segata, M.; Bloessl, B.; Joerer, S.; Dressler, F.; Cigno, R.L. Supporting platooning maneuvers through IVC: An initial protocol analysis for the JOIN maneuver. In Proceedings of the 2014 11th Annual Conference on Wireless On-Demand Network Systems and Services (WONS), Obergurgl, Austria, 2–4 April 2014; pp. 130–137. [Google Scholar]
- Peng, H.; Li, D.; Abboud, K.; Zhou, H.; Zhao, H.; Zhuang, W.; Shen, X. Performance analysis of IEEE 802.11p DCF for inter-platoon communications with autonomous vehicles. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM 2015), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Peng, H.; Li, D.; Abboud, K.; Zhou, H.; Huang, W.; Shen, X.; Zhao, H. Performance analysis of IEEE 802.11p DCF for multiplatooning communications with autonomous vehicles. IEEE Trans. Veh. Technol. 2017, 66, 2485–2498. [Google Scholar] [CrossRef]
- Shao, C.; Leng, S.; Fan, B.; Zhang, Y.; Vinel, A.; Jonsson, M. Connectivity-aware medium access control in platoon-based vehicular ad hoc networks. In Proceedings of the IEEE International Conference on Communications, London, UK, 10–14 June 2015; pp. 3305–3310. [Google Scholar]
- Du, L.; Dao, H. Information dissemination delay in vehicle-to-vehicle communication networks in a traffic stream. IEEE Trans. Veh. Technol. 2015, 16, 66–80. [Google Scholar] [CrossRef]
- Jia, D.Y.; Zhang, R.; Lu, K.J.; Wang, J.P.; Bi, Z.Q.; Lei, J.S. Improving the uplink performance of drive-thru internet via platoon-based cooperative retransmission. IEEE Trans. Veh. Technol. 2014, 63, 4536–4545. [Google Scholar] [CrossRef]
- Hafeez, K.A.; Zhao, L.; Liao, Z.; Ngok-Wah Ma, B. Performance analysis of broadcast messages in VANETs safety applications. In Proceedings of the 2010 IEEE Global Telecommunications Conference (GLOBECOM 2010), Miami, FL, USA, 6–10 December 2010; pp. 1–5. [Google Scholar]
- Han, C.; Dianati, M.; Tafazolli, R.; Kernchen, R.; Shen, X. Analytical study of the IEEE 802.11p MAC sublayer in vehicular networks. IEEE Trans. Veh. Technol. 2012, 13, 873–886. [Google Scholar] [CrossRef]
- Song, C. Performance Analysis of the IEEE 802.11 p Multichannel MAC Protocol in Vehicular Ad Hoc Networks. Sensors 2017, 17, 2890. [Google Scholar] [CrossRef] [PubMed]
- Fernandes, P.; Nunes, U. Platooning with IVC-enabled autonomous vehicles: Strategies to mitigate communication delays, improve safety and traffic flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Yang, Q.; Xing, S.; Xia, W.; Shen, L. Modelling and performance analysis of dynamic contention window scheme for periodic broadcast in vehicular ad hoc networks. IET Commun. 2015, 9, 1347–1354. [Google Scholar] [CrossRef]
- Yao, Y.; Rao, L.; Liu, X. Performance and reliability analysis of IEEE 802.11p safety communication in a highway environment. IEEE Trans. Veh. Technol. 2013, 62, 4198–4212. [Google Scholar] [CrossRef]
- Mahal, S. Effects of Communication Delays on String Stability in an AHS Environment. Master’s Thesis, UC Berkeley, Berkeley, CA, USA, 2000. [Google Scholar]
- Kavathekar, P.; Chen, Y.Q. Vehicle platooning: A brief survey and categorization. In Proceedings of the ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Washington, DC, USA, 28–31 August 2011; pp. 829–845. [Google Scholar]
- Vinel, A.; Lan, L.; Lyamin, N. Vehicle-to-vehicle communication in C-ACC/platooning scenarios. IEEE Commun. Mag. 2015, 53, 192–197. [Google Scholar] [CrossRef]
- Chu, T.M.C.; Phan, H.; Zepernick, H.J. On the performance of underlay cognitive radio networks using M/G/1/K queueing model. IEEE Commun. Lett. 2013, 17, 876–879. [Google Scholar]
- Lu, K.; Wu, D.; Fang, Y.; Qiu, R.C. Performance analysis of a burstframe-based MAC protocol for ultra-wideband ad hoc networks. In Proceedings of the IEEE ICC, Seoul, Korea, 16–20 May 2005; pp. 2937–2941. [Google Scholar]
- Bai, X. Performance Investigation of IEEE 802.11e EDCA Based on the M/G/1/K Queue Model. J. Electron. Inf. Technol. 2008, 30, 1610–1614. [Google Scholar] [CrossRef]
- Liu, X.; Goldsmith, A.; Mahal, S.S.; Hedrick, J.K. Effects of communication delay on string stability in vehicle platoons. In Proceedings of the 2001 IEEE Intelligent Transportation Systems, Oakland, CA, USA, 25–29 August 2001; pp. 625–630. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| R | 300 m | 5000 | |
| 4096 bits | 20 μs | ||
| 224 bits | CW | 15 | |
| 192 bits | 64 s | ||
| 112 + 192 bits | Data rate | 6 Mbps |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, C.; Si, S.; Guo, H.; Zhao, H. Modeling and Performance of the IEEE 802.11p Broadcasting for Intra-Platoon Communication. Sensors 2018, 18, 2971. https://doi.org/10.3390/s18092971
Yu C, Si S, Guo H, Zhao H. Modeling and Performance of the IEEE 802.11p Broadcasting for Intra-Platoon Communication. Sensors. 2018; 18(9):2971. https://doi.org/10.3390/s18092971
Chicago/Turabian StyleYu, Chong, Shuaizong Si, Hongye Guo, and Hai Zhao. 2018. "Modeling and Performance of the IEEE 802.11p Broadcasting for Intra-Platoon Communication" Sensors 18, no. 9: 2971. https://doi.org/10.3390/s18092971
APA StyleYu, C., Si, S., Guo, H., & Zhao, H. (2018). Modeling and Performance of the IEEE 802.11p Broadcasting for Intra-Platoon Communication. Sensors, 18(9), 2971. https://doi.org/10.3390/s18092971