On the Sensitivity of the Parameters of the Intensity-Based Stochastic Model for Terrestrial Laser Scanner. Case Study: B-Spline Approximation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Mathematical Background
2.1. Functional Model
2.2. Stochastic Model for TLS
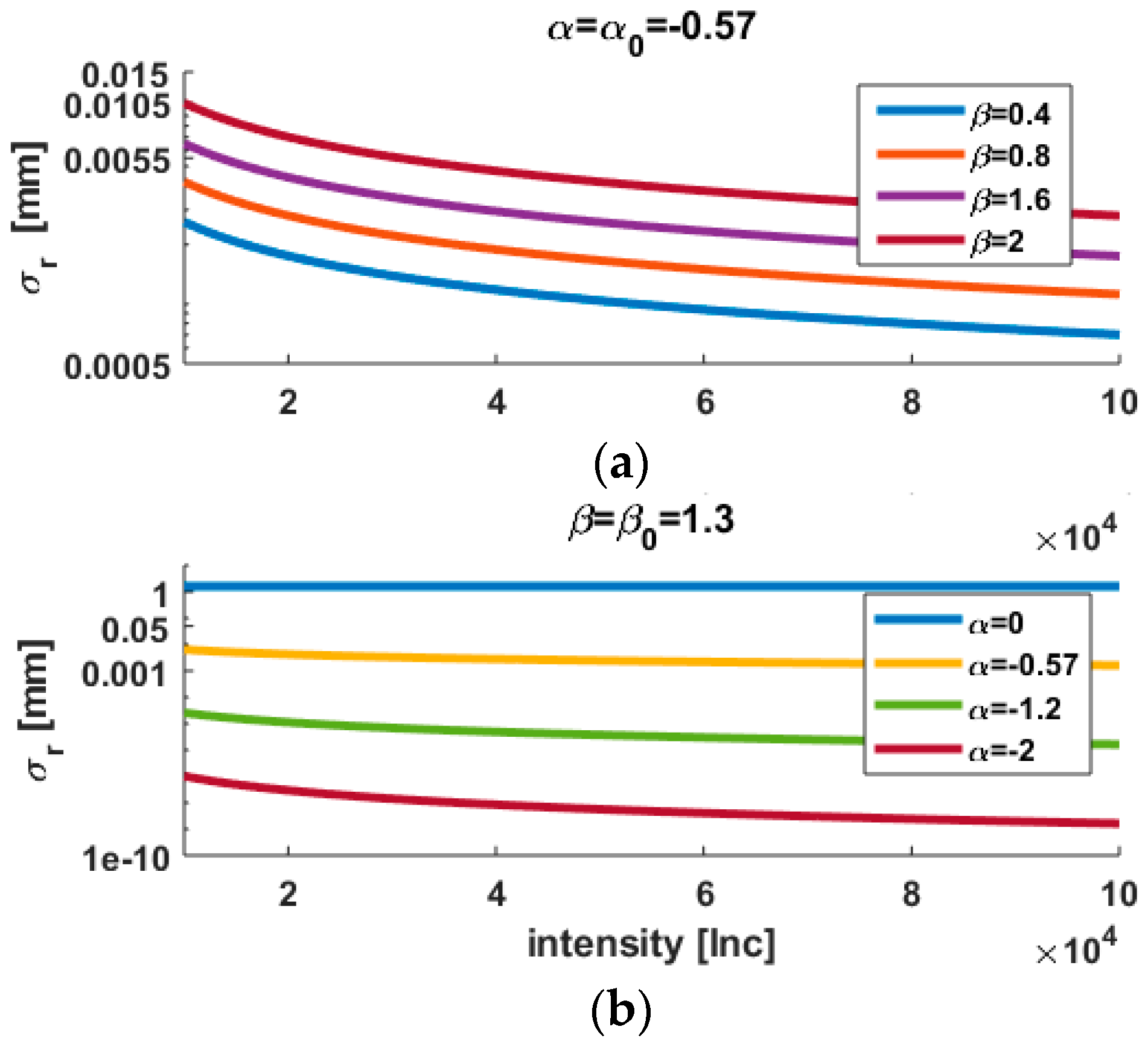
2.2.1. Stochastic Model for Range Measurements
2.2.2. Note on Scaling
2.2.3. Building the VCM of the TLS Measurements
2.2.4. Mathematical Correlations
2.3. Effect of Misspecification of the VCM
- The a posteriori variance factor, which is a key quantity in many statistical tests [2] such as the overall model test, and allows judgment of the LS solution.
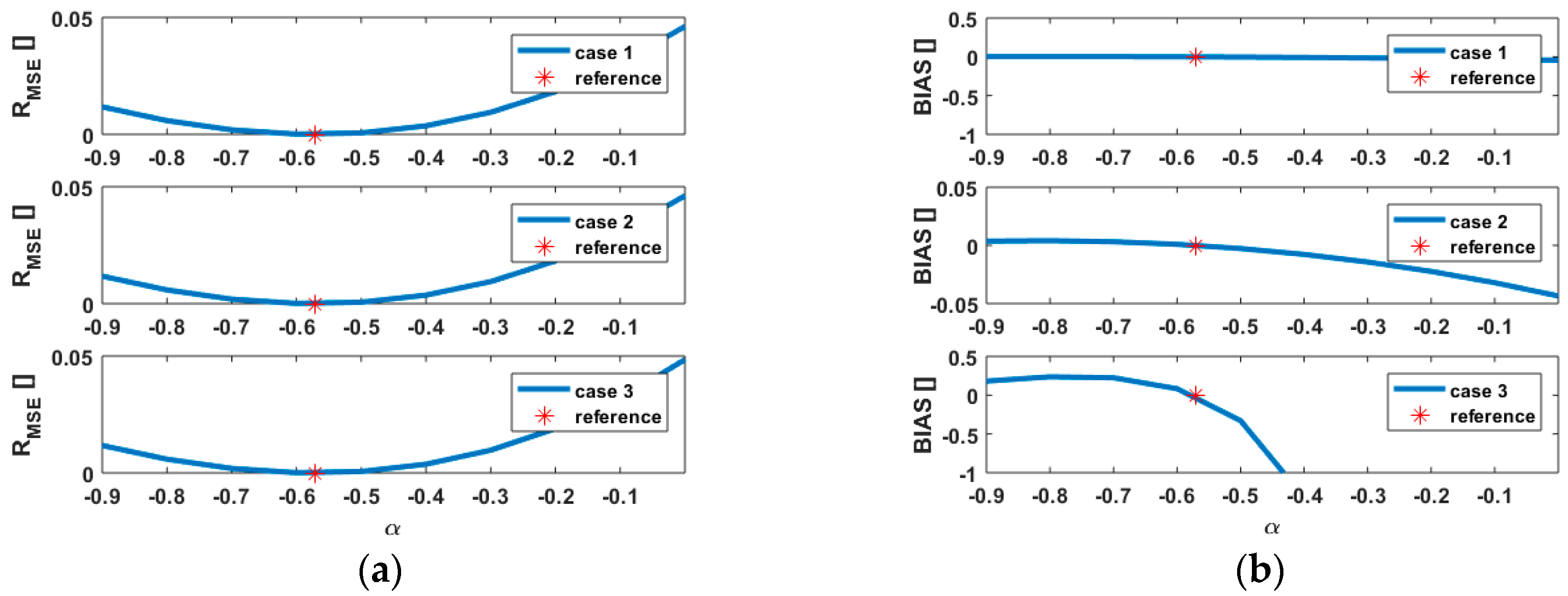
- The loss of efficiency of the estimator, which is based on a ratio of mean-squared errors (MSE). It measures the performance of the LS estimator: an MSE close to 0 means that the estimator has a perfect accuracy. MSE should only be used for comparative purposes. The main advantage of the MSE formulation is its nondependency on the dataset allowing still a quantification of the mean-squared differences of the estimated parameters when VCM are changed [37].
3. Simulation
3.1. Methodology
- The Cartesian observations are approximated with a B-splines curve by assuming that . is the identity matrix. i.e., no assumption about the stochastic properties of the TLS measurements is made in this first step. The design matrix is filled using the knot vector and B-splines of order 3 [27], as seen in Equation (2).
- The computed observations are obtained from , where are the coordinates of the estimated CP.
- The OMC observations are given by . They thus correspond to having extracted the geometry from the original observations: is a zero-mean vector (or a straight line). The VCM of the OMC measurements corresponds exactly to but will be replaced by its approximation in the second LS adjustment, i.e., the approximation of the straight line. In this last step, the determination of the knot vector and by extension of the design matrix are straightforward and we choose an order 0 for the B-splines. is filled up with 1, and only one control point is estimated, which corresponds to the mean estimator.
3.2. Intensity Vector
- Case 1: the intensity vector is the original one , seen in Figure 2a. The mean intensity value is 930,000 Inc, which corresponds to a mean estimated standard deviation for the range of .
- Case 2: the intensity is the same as case 1, rescaled by a factor 1/100. By doing so, we aim to simulate low intensity values, seen in Figure 2b. Following Figure 1, a higher variability of the range variance because of the power function is expected. A higher impact on the a posteriori variance factor or the loss of efficiency when or are misspecified can be expected.
- Case 3: the intensity profile corresponding to case 1 is divided in the middle into two parts, seen in Figure 2c: the first part corresponds to case 1, whereas the second one to case 2. The intent here is to simulate intensity values that would vary strongly inside the same object due e.g., to different reflectivity properties.
3.3. Scaling of
3.4. Results of Simulations
3.4.1. Varying
- Case 1 and 2
- Case 3
3.4.2. Varying
3.4.3. Note on the Scaled Identity Matrix, Case 1
3.5. Summary of the Simulations
4. Real Case Analysis
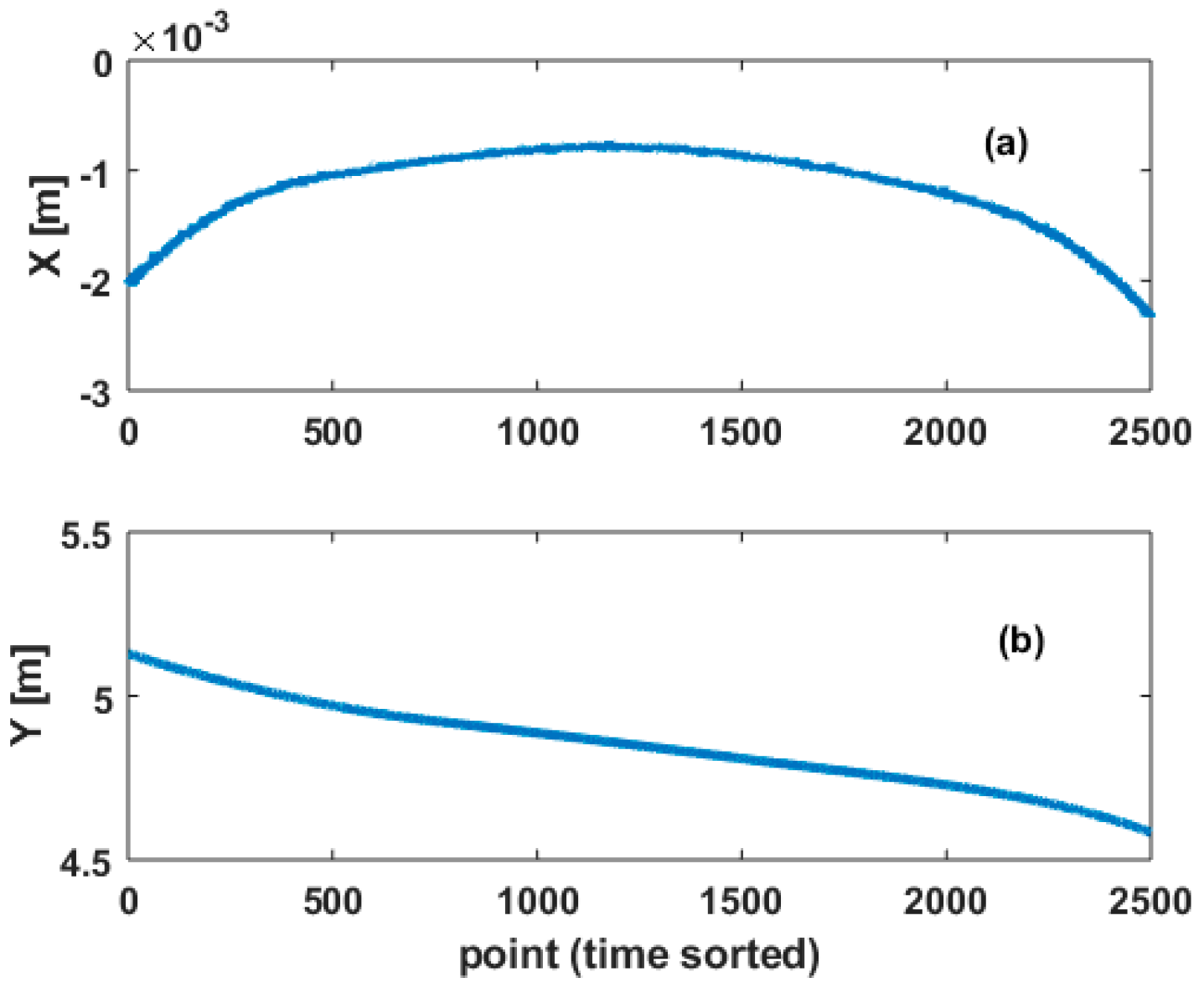
4.1. Methodology
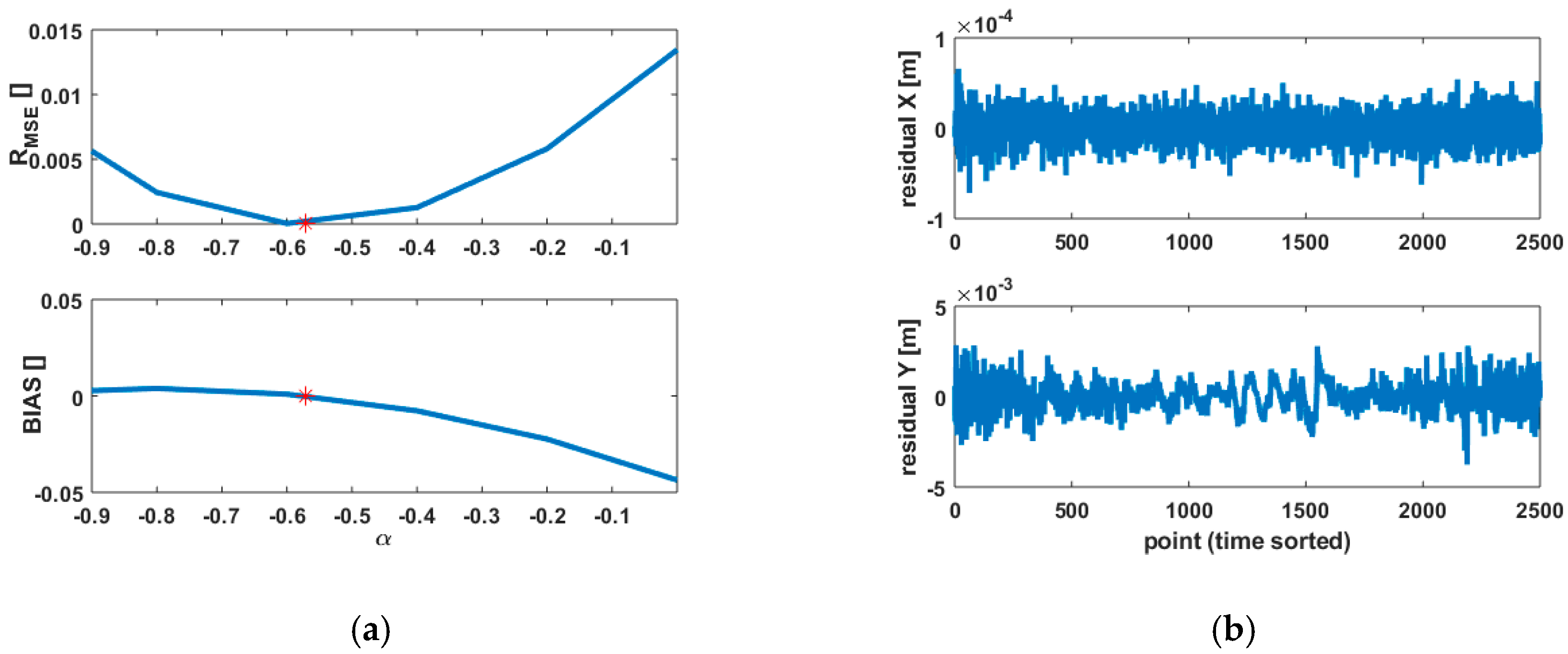
4.2. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Boehler, W.; Marbs, A. 3D Scanning instruments. In Proceedings of the CIPA WG6 International Workshop on Scanning for Cultural Heritage Recording, Corfu, Greece, 1–2 September 2002. [Google Scholar]
- Lichti, D.D.; Gordon, S.J.; Tipdecho, T. Error models and propagation in directly georeferenced terrestrial laser scanner networks. J. Surv. Eng. 2005, 131, 135–142. [Google Scholar] [CrossRef]
- Li, X.; Li, Y.; Xie, X.; Xu, L. Lab-built terrestrial laser scanner self-calibration using mounting angle error correction. Opt. Express 2018, 26, 14444–14460. [Google Scholar] [CrossRef] [PubMed]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Lambertus, T.; Belton, D.; Helmholz, P. Empirical investigation of a stochastic model based on intensity values for terrestrial laser scanning. AVN Allg. Vermess.-Nachr. 2018, 125, 43–52. [Google Scholar]
- Ozendi, M.; Akca, D.; Topan, H. A generic point error model for TLS derived point clouds. In Videometrics, Range Imaging, and Applications XIV; International Society for Optics and Photonics: Bellingham, WA, USA, 2017. [Google Scholar]
- Elkhrachy, I.; Niemeier, W. Stochastic assessment of terrestrial laser scanner. In Proceedings of the ASPRS Annual Conference, Reno, NV, USA, 1–5 May 2006. [Google Scholar]
- Heinz, E.; Holst, C.; Kuhlmann, H. Erhöhung der räumlichen Auflösung oder Steigerung der Einzelpunktgenauigkeit beim Laserscanning–Analyse der Modellierungsgenauigkeit am Beispiel einer Ebene. In Photogrammetrie Laserscanning Optische 3D-Messtechnik-Beiträge der Oldenburger 3D-Tage 2018; Luhmann, T., Schumacher, C., Eds.; Wichmann Verlag: Berlin, Germany, 2018. [Google Scholar]
- Zámêcníková, M.; Neuner, H.; Pegritz, S.; Sonnleitner, R. Investigation on the influence of the incidence angle on the reflectorless distance measurement of a terrestrial laser scanner. Österr. Z. Vermess. Geoinform. 2015, 103, 208–218. [Google Scholar]
- Andrews, L.C.; Phillips, R.L. Laser Beam Propagation through Random Media, 2nd ed.; SPIE—The International Society for Optical Engineering: Washington, DC, USA, 2005. [Google Scholar]
- Kauker, S.; Schwieger, V. A synthetic covariance matrix for monitoring by terrestrial laser scanning. A synthetic covariance matrix for monitoring by terrestrial laser scanning. J. Appl. Geod. 2017, 11, 77–87. [Google Scholar]
- Kauker, S.; Holst, C.; Schwieger, V.; Kuhlmann, H.; Schön, S. Spatio-temporal correlations of terrestrial laser scanning. AVN Allg. Vermess. Nachr. 2016, 6, 170–182. [Google Scholar]
- Jurek, T.; Kuhlmann, H.; Host, C. Impact of spatial correlations on the surface estimation based on terrestrial laser scanning. J. Appl. Geod. 2017, 11, 143–155. [Google Scholar] [CrossRef]
- Wujanz, D.; Burger, M.; Mettenleiter, M.; Neitzel, F. An intensity-based stochastic model for terrestrial laser scanners. ISPRS J. Photogramm. Remote Sens. 2017, 125, 146–155. [Google Scholar] [CrossRef]
- Wujanz, D.; Burger, M.; Tschirschwitz, F.; Nietzschmann, T.; Neitzel, F.; Kersten, T.P. Determination of intensity-based stochastic models for terrestrial laser scanners utilising 3D-point clouds. Sensors 2018, 18, 2187. [Google Scholar] [CrossRef] [PubMed]
- Hebert, M.; Krotkov, E. 3D measurements from imaging laser radars: How good are they? Image Vis. Comput. 1992, 10, 170–178. [Google Scholar] [CrossRef]
- Mettenleiter, M.; Härtl, F.; Kresser, S.; Fröhlich, C. Laserscanning—Phasenbasierte Lasermesstechnik für Die Hochpräzise und Schnelle Dreidimensionale Umgebungserfassung; Die Bibliothek der Technik Band 371; Süddeutscher Verlag Onpact GmbH: Munich, Germany, 2015. [Google Scholar]
- Luo, X.; Mayer, M.; Heck, B.; Awange, J.L. A realistic and easy-to-implement weighting model for GNSS phase observations. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6110–6118. [Google Scholar] [CrossRef]
- Wieser, A.; Brunner, F.K. An extended weight model for GPS phase observations. EPS 2000, 52, 777–782. [Google Scholar] [CrossRef]
- Timmen, A. Definition und Ableitung eines Qualitätsindexes zur Visualisierung der Qualitätsparameter von 3D-Punktwolken in Einer Virtuellen Umgebung; Masterthesis Geodetic Institute Hannover: Hannover, Germany, 2016. [Google Scholar]
- Lenzmann, L.; Lenzmann, E. Strenge Auswertung des nichtlinearen Gauß Helmert-Modells. AVN Allg. Vermess. Nachr. 2004, 111, 68–73. [Google Scholar]
- de Boor, C. A Practical Guide to Splines, Revised ed.; Springer: New York, NY, USA, 2001. [Google Scholar]
- Kermarrec, G.; Schön, S. On modelling GPS phase correlations: A parametric model. Acta Geod. Geophys. 2018, 58, 139–156. [Google Scholar] [CrossRef]
- Rao, C.R.; Toutenburg, H. Linear Models, Least-Squares and Alternatives, 2nd ed.; Springer: New York, NY, USA, 1999. [Google Scholar]
- Xu, P. The effect of incorrect weights on estimating the variance of unit weigth. Stud. Geophys. Geod. 2013, 57, 339–352. [Google Scholar] [CrossRef]
- Zhao, X.; Kargoll, B.; Omidalizarandi, M.; Xu, X.; Alkhatib, H. Model selection for parametric surfaces approximating 3D point clouds for deformation analysis. Remote Sens. 2018, 10, 634. [Google Scholar] [CrossRef]
- Bureick, J.; Alkhatib, H.; Neumann, I. Robust spatial approximation of laser scanner points clouds by means of free-form curve approaches in deformation analysis. J. Appl. Geod. 2016, 10, 27–35. [Google Scholar] [CrossRef]
- Harmening, C.; Neuner, H. Choosing the Optimal Number of B-spline Control Points (Part 1 Methodology and Approximation of Curves). J. Appl. Geod. 2016, 10, 139–157. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The NURBS Book; Springer Science & Business Media: Berlin, Germany, 1997. [Google Scholar]
- Koch, K. Fitting Free-Form Surfaces to Laserscan Data by NURBS. AVN Allg. Vermess. Nachr. 2009, 116, 134–140. [Google Scholar]
- Alkhatib, H.; Kargoll, B.; Bureick, J.; Paffenholz, J.A. Statistical evaluation of the B-Splines approximation of 3D point clouds. In Proceedings of the 2018 FIG-Kongresses, Istanbul, Türkei, 6–11 May 2018. [Google Scholar]
- Williams, M.N.; Gomez Grajales, C.A.; Kurkiewicz, D. Assumptions of Multiple Regression: Correcting Two Missconceptions. Practical Assessment. Res. Eval. 2013, 18, 11. [Google Scholar]
- Koch, K. Parameter Estimation and Hypothesis Testing in Linear Models; Springer: Berlin, Germany, 1999. [Google Scholar]
- Zhao, X.; Alkhatib, H.; Kargoll, B.; Neumann, I. Statistical evaluation of the influence of the uncertainty budget on B-spline curve approximation. J. Appl. Geod. 2017, 11, 215–230. [Google Scholar] [CrossRef]
- Greene, W.H. Econometricanalysis, 5th ed.; PrenticeHall: Upper Saddle River, NJ, USA, 2003. [Google Scholar]
- Kutterer, H. On the sensitivity of the results of least-squares adjustments concerning the stochastic model. J. Geod. 1999, 73, 350–361. [Google Scholar] [CrossRef]
- Kermarrec, G.; Schön, S. A priori fully populated covariance matrices in Least-Squares adjustment—Case Study: GPS relative positioning. J. Geod. 2017, 91, 465–484. [Google Scholar] [CrossRef]
- Stein, M.L. Interpolation of Spatial Data: Some Theory for Kriging; Springer: New York, NY, USA, 1999. [Google Scholar]
- Schacht, G.; Piehler, J.; Müller, J.Z.A.; Marx, S. Belastungsversuche an der historischen Gewölbebrücke über die Aller bei Verden. Bautechnik 2017, 94, 125–130. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Testing Theory; An Introduction; VSSD Publishing: Delft, The Netherlands, 2000. [Google Scholar]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kermarrec, G.; Alkhatib, H.; Neumann, I. On the Sensitivity of the Parameters of the Intensity-Based Stochastic Model for Terrestrial Laser Scanner. Case Study: B-Spline Approximation. Sensors 2018, 18, 2964. https://doi.org/10.3390/s18092964
Kermarrec G, Alkhatib H, Neumann I. On the Sensitivity of the Parameters of the Intensity-Based Stochastic Model for Terrestrial Laser Scanner. Case Study: B-Spline Approximation. Sensors. 2018; 18(9):2964. https://doi.org/10.3390/s18092964
Chicago/Turabian StyleKermarrec, Gaël, Hamza Alkhatib, and Ingo Neumann. 2018. "On the Sensitivity of the Parameters of the Intensity-Based Stochastic Model for Terrestrial Laser Scanner. Case Study: B-Spline Approximation" Sensors 18, no. 9: 2964. https://doi.org/10.3390/s18092964
APA StyleKermarrec, G., Alkhatib, H., & Neumann, I. (2018). On the Sensitivity of the Parameters of the Intensity-Based Stochastic Model for Terrestrial Laser Scanner. Case Study: B-Spline Approximation. Sensors, 18(9), 2964. https://doi.org/10.3390/s18092964