Improvement of Ultrasonic Pulse Generator for Automatic Pipeline Inspection

 , , ,
, , , 
Abstract
:1. Introduction
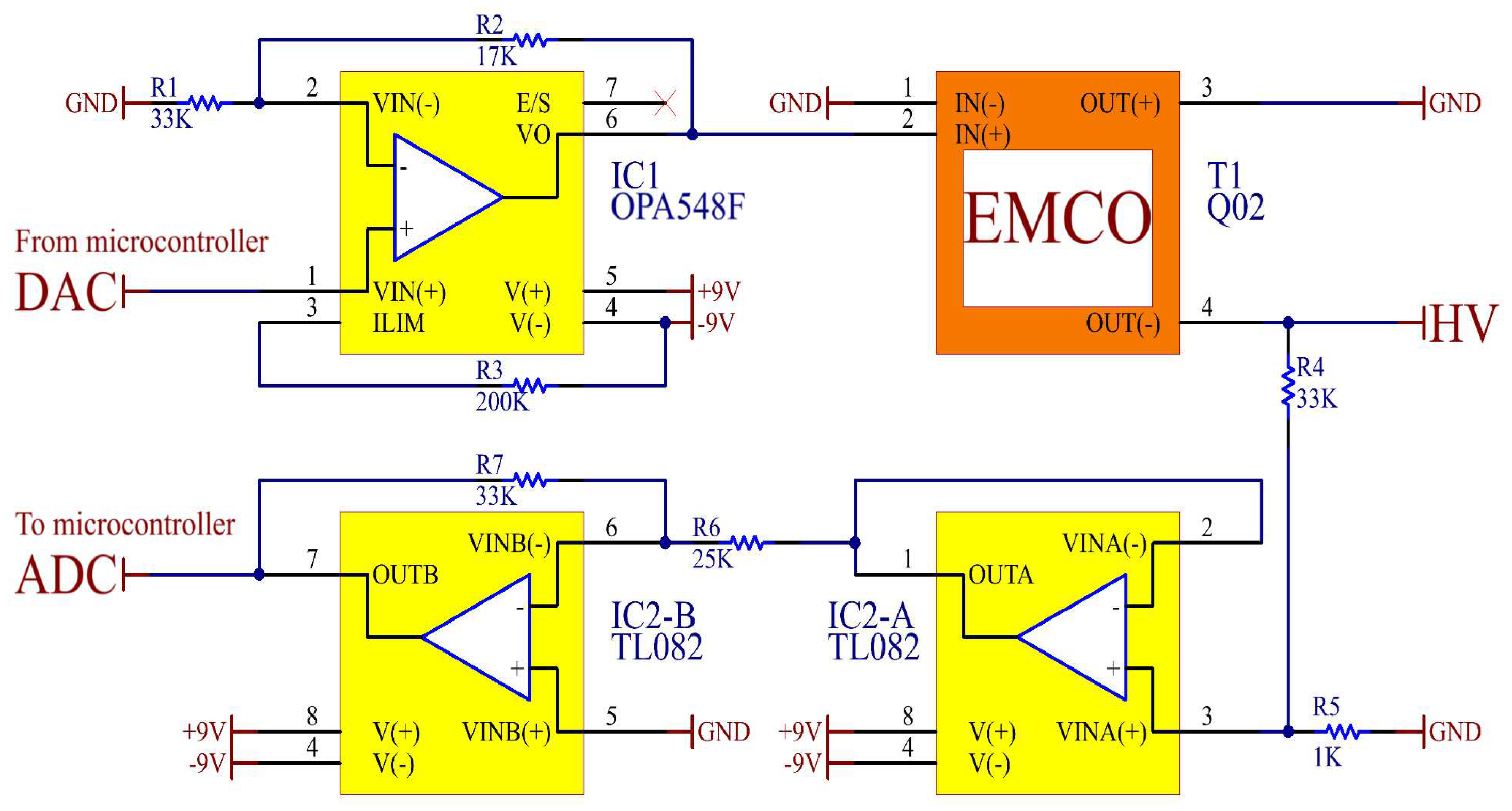
2. Ultrasonic Pulse Generator Design
3. Materials and Methods
3.1. Characterization of the Transfer Function of the DC-HV DC Converter
3.2. Control Scheme Selection
3.2.1. PID Tuning by Simultaneous Optimization of Several Responses (SOSR)
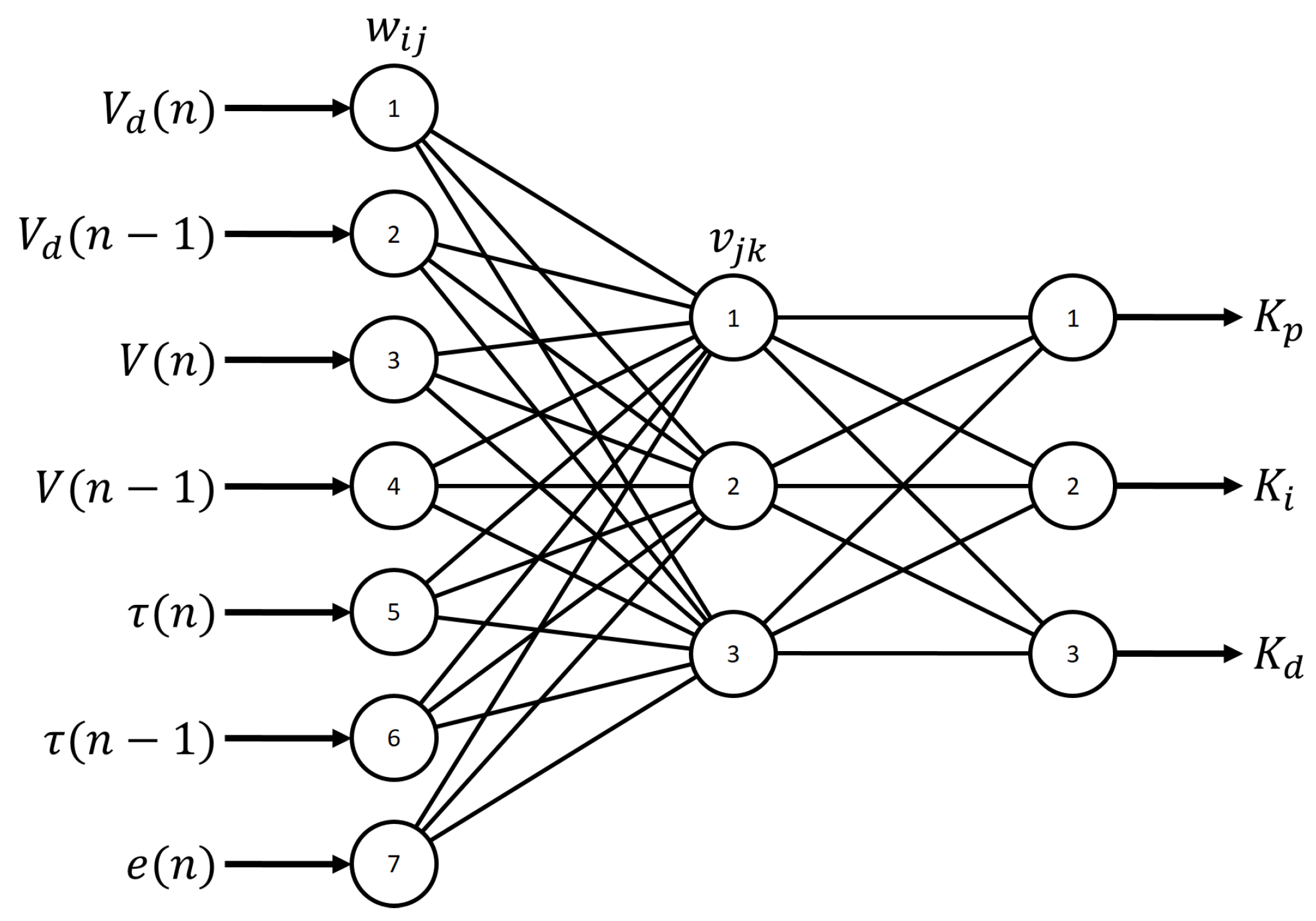
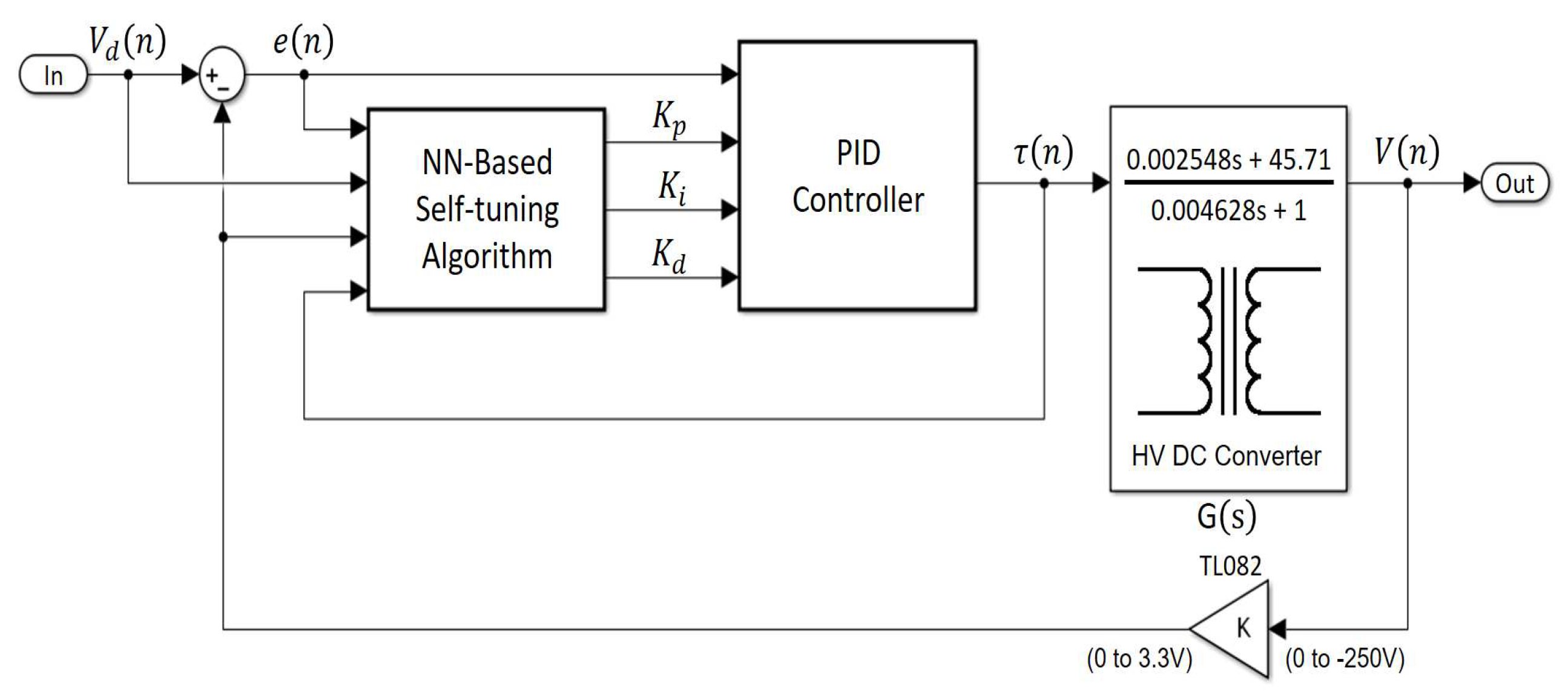
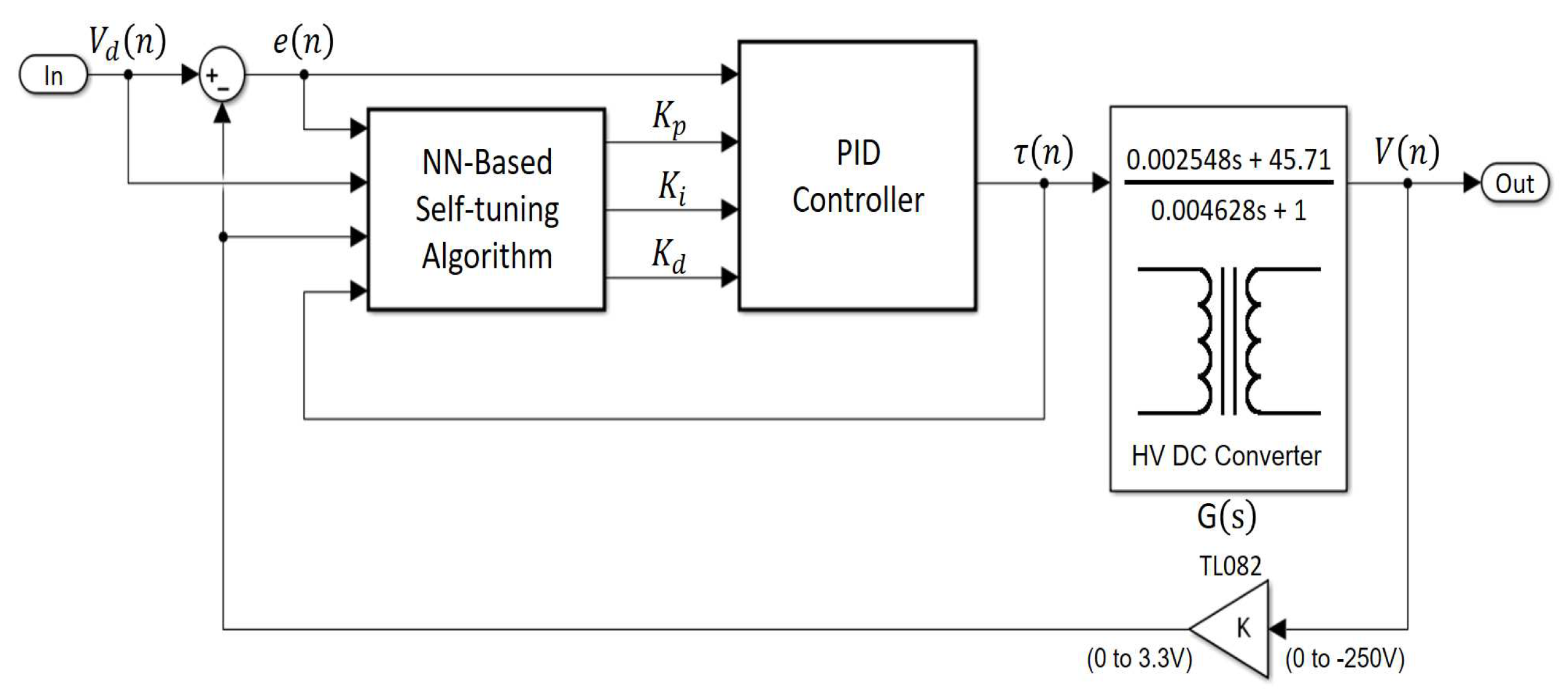
3.2.2. PID Tuning by Neural Network
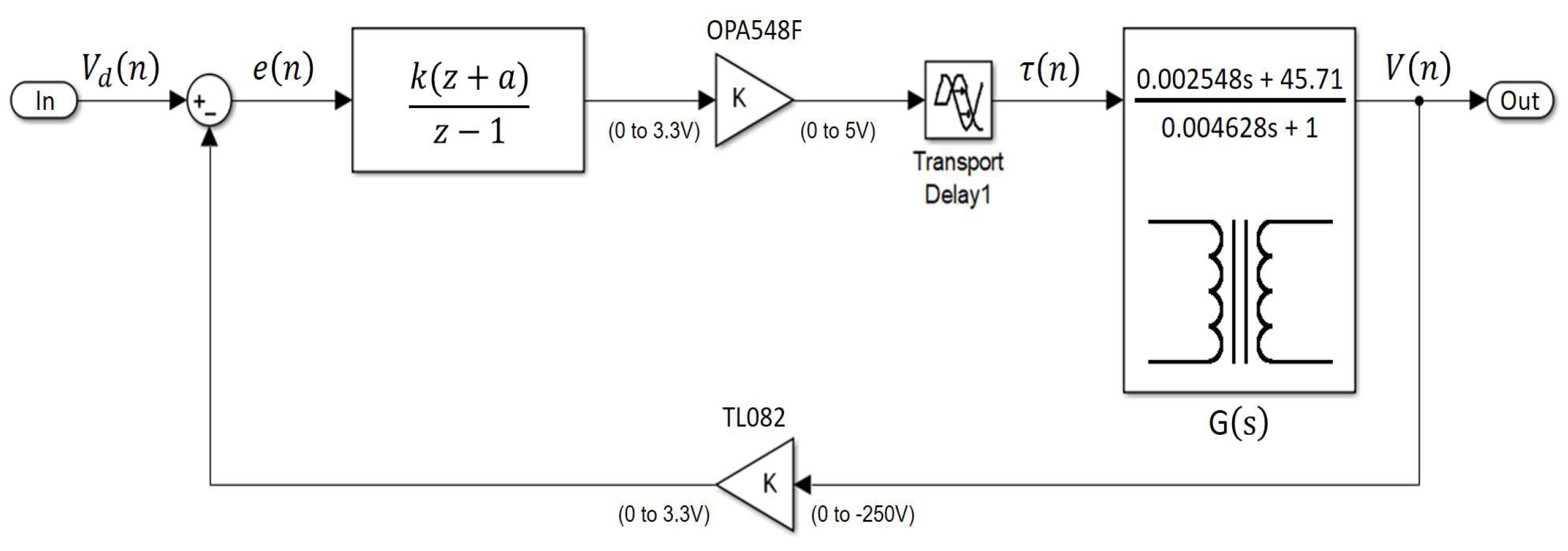
3.2.3. PID Tuning by Analytical Design Method
4. Results
4.1. Selecting the Control Scheme
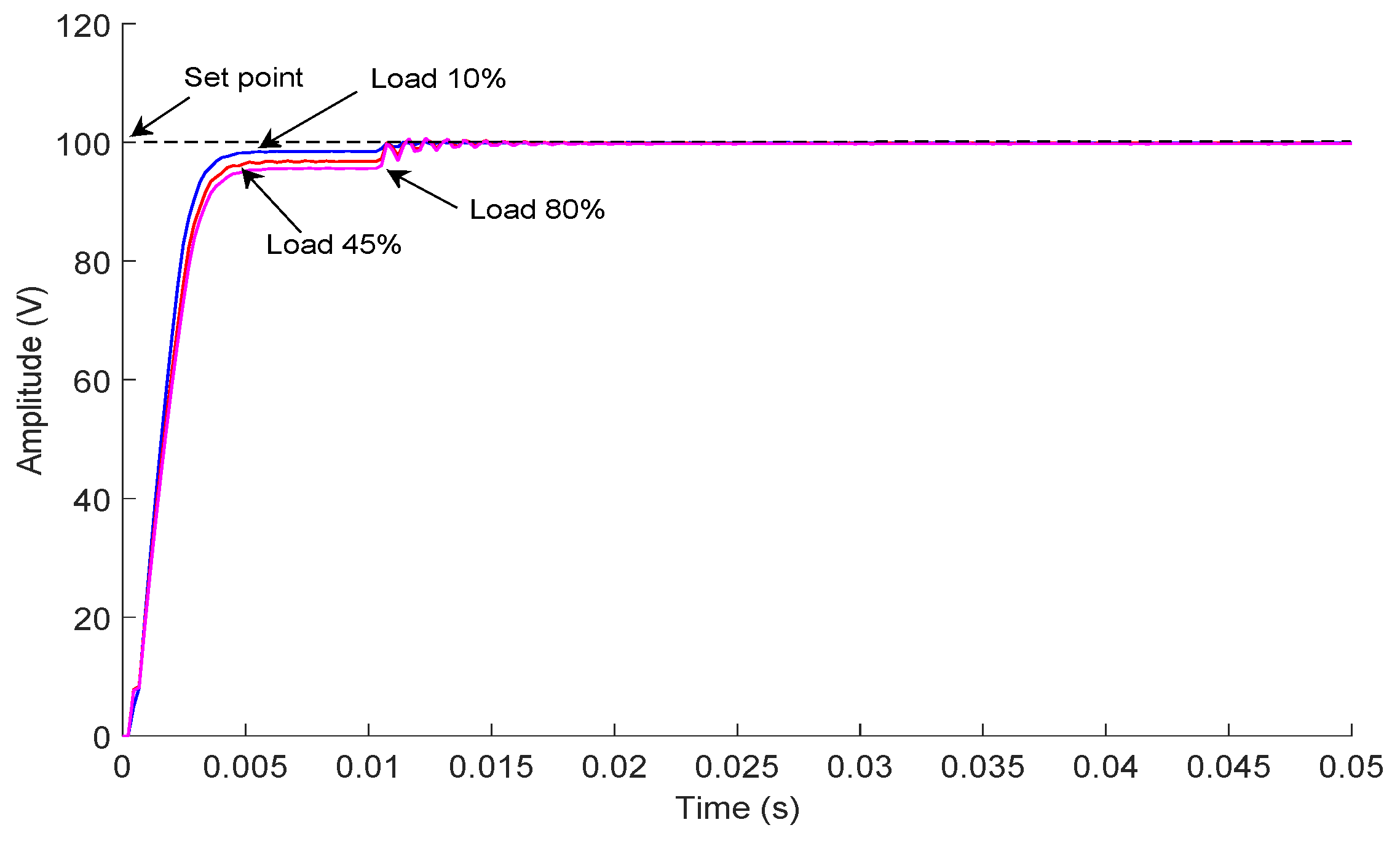
4.2. Control Testing of Step Input
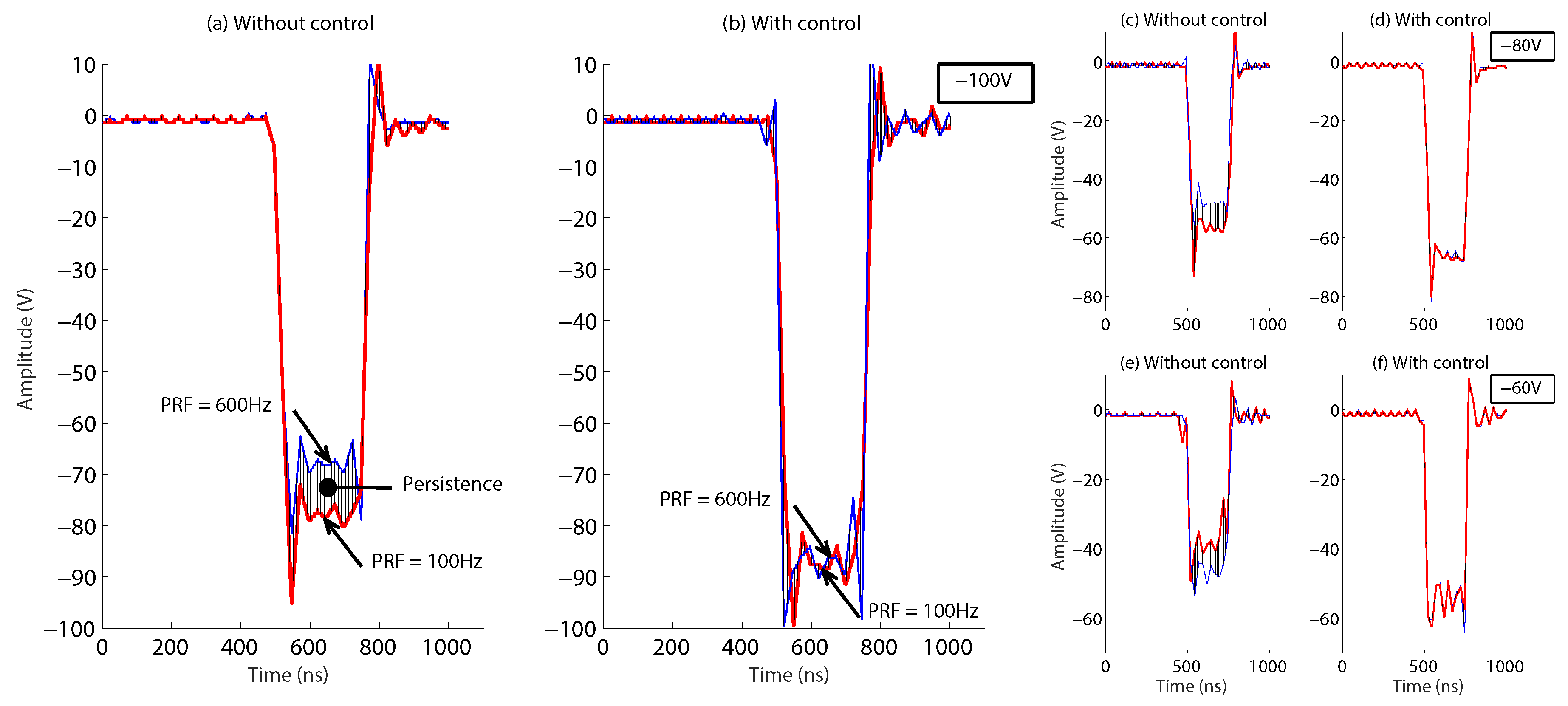
4.3. Control Testing for Different Frequencies and Amplitudes
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sharma, K.; Singh, S.; Dubey, P.K. Design of Low Cost Broadband Ultrasonic Pulser–Receiver. MAPAN 2017, 32, 95–100. [Google Scholar] [CrossRef]
- Qiu, W.; Yu, Y.; Tsang, F.K.; Sun, L. A Multifunctional, Reconfigurable Pulse Generator for High-Frequency Ultrasound Imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 1558–1567. [Google Scholar] [CrossRef] [PubMed]
- Svilainis, L.; Chaziachmetovas, A.; Dumbrava, V. Half bridge topology 500 V pulser for ultrasonic transducer excitation. Ultrasonics 2015, 59, 79–85. [Google Scholar] [CrossRef] [PubMed]
- Haider, B. Power Drive Circuits for Diagnostic Medical Ultrasound. In Proceedings of the 18th International Symposium on Power Semiconductor Devices and IC’s, Naples, Italy, 4–8 June 2006; pp. 1–8. [Google Scholar] [CrossRef]
- Lei, H.; Huang, Z.; Liang, W.; Mao, Y.; Que, P.W. Ultrasonic Pig for Submarine Oil Pipeline Corrosion Inspection. Russ. J. Nondestruct. Test. 2009, 45, 285–291. [Google Scholar] [CrossRef]
- C. de Normalizacion de Petroleos Mexicanos e Instituciones Subsidiarias. Inspeccion de Ductos de Transporte Mediante Equipos Instrumentados; Technic Report NRF-060-PEMEX; PEMEX: Mexico City, Mexico, 2012. [Google Scholar]
- The American Society of Mechanical Engineers—ASME. B31.4 Pipelines Transportation Systems for Liquid Hydrocarbons and Other Liquids; Technic Report; ASME: New York, NY, USA, 2006; pp. 52–55. [Google Scholar]
- Hayward, G. The influence of pulser parameters on the transmission response of piezoelectric transducers. Ultrasonics 1985, 23, 103–112. [Google Scholar] [CrossRef]
- Cardoso, G.; Saniie, J. Ultrasonic Data Compression via Parameter Estimation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 313–325. [Google Scholar] [CrossRef] [PubMed]
- Alobaidi, W.M.; Kintner, C.E.; Alkuam, E.A.; Sasaki, K.; Yusa, N.; Hashizume, H.; Sandgren, E. Experimental Evaluation of Novel Hybrid Microwave/Ultrasonic Technique to Locate and Characterize Pipe Wall Thinning. J. Press. Vessel Technol. 2018, 140, 011501. [Google Scholar] [CrossRef]
- Guofeng, D.; Kong, Q.; Zhou, H.; Gu, H. Multiple cracks detection in pipeline using damage index matrix based on piezoceramic transducer-enabled stress wave propagation. Sensors 2017, 17, 1812. [Google Scholar] [CrossRef]
- Canavese, G.; Scaltrito, L.; Ferrero, S.; Pirri, C.F.; Cocuzza, M.; Pirola, M.; Corbellini, S.; Ghione, G.; Ramella, C.; Verga, F.; et al. A novel smart caliper foam pig for low-cost pipeline inspection—Part A: Design and laboratory characterization. J. Pet. Sci. Eng. 2015, 127, 311–317. [Google Scholar] [CrossRef]
- Alobaidi, W.M.; Alkuam, E.A.; Al-Rizzo, H.M.; Sandgren, E. Applications of Ultrasonic Techniques in Oil and Gas Pipeline Industries: A Review. Am. J. Oper. Res. 2015, 5, 274–287. [Google Scholar] [CrossRef]
- Carvalho, A.A.; Rebello, J.M.A.; Souza, M.P.V.; Sagrilo, L.V.S.; Soares, S.D. Reliability of non-destructive test techniques in the inspection of pipelines used in the oil industry. Int. J. Press. Vessels Pip. 2008, 85, 745–751. [Google Scholar] [CrossRef]
- Feng, Q.; Li, R.; Nie, B.; Liu, S.; Zhao, L.; Zhang, H. Literature Review: Theory and Application of In-Line Inspection Technologies for Oil and Gas Pipeline Girth Weld Defection. Sensors 2016, 17, 50. [Google Scholar] [CrossRef] [PubMed]
- Dobmann, G.; Barbian, O.A.; Willems, H. State of the Art of In-Line Nondestructive Weld Inspection of Pipelines by Ultrasonics. Russian J. Nondestruct. Test. 2007, 43, 755–761. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, S.; Liu, S.; Wang, Y. Collisional vibration of PIGs (pipeline inspection gauges) passing through girth welds in pipelines. J. Nat. Gas Sci. Eng. 2017, 37, 15–28. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, S.; Liu, S.; Wang, Y.; Lin, L. Measurement and analysis of friction and dynamic characteristics of PIG’s sealing disc passing through girth weld in oil and gas pipeline. Measurement 2015, 64, 112–122. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, S.; Liu, S.; Zhu, X.; Tang, B. Chatter vibration phenomenon of pipeline inspection gauges (PIGs) in natural gas pipeline. J. Nat. Gas Sci. Eng. 2015, 27, 1129–1140. [Google Scholar] [CrossRef]
- Mazraeh, A.; Alnaimi, F. Multi-Diameter Pipeline Inspection Gauge for Lang Distance Industrial Application. Int. J. Sci. Eng. Res. 2015, 6, 646–651. [Google Scholar] [CrossRef]
- Liu, Z.; Kleiner, Y. State of the art review of inspection technologies for condition assessment of water pipes. Measurement 2013, 46, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Qiu, W.; Wang, C.; Li, Y.; Zhou, J.; Yang, G.; Xiao, Y.; Feng, G.; Jin, Q.; Mu, P.; Qian, M.; et al. A scanning-mode 2D shear wave imaging (s2D-SWI) system for ultrasound elastography. Ultrasonics 2015, 62, 89–96. [Google Scholar] [CrossRef] [PubMed]
- Nava-Balanzar, L.; Soto-Cajiga, J.A.; Pedraza-Ortega, J.C.; Ramos-Arreguin, J.M. Development of an Ultrasonic Thickness Measurement Equipment Prototype. In Proceedings of the 20th CONIELECOMP, Cholula, Mexico, 22–24 February 2010; pp. 124–129. [Google Scholar] [CrossRef]
- Soto-Cajiga, J.A.; Pedraza-Ortega, J.C.; Rubio-Gonzalez, C.; Bandala-Sanchez, M.; Romero-Troncoso, R.J. FPGA-based architecture for real-time data reduction of ultrasound signals. Ultrasonics 2012, 52, 230–237. [Google Scholar] [CrossRef] [PubMed]
- XP Power. Q Series, Isolated, Proportional DC to HV DC Converters; Data Sheet: XP-EMCO; XP Power: Singapore, 2016. [Google Scholar]
- El-Desouki, M.M.; Hynynen, K. Driving Circuitry for Focused Ultrasound Noninvasive Surgery and Drug Delivery Applications. Sensors 2011, 11, 539–556. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Svilainis, L.; Chaziachmetovas, A.; Dumbrava, V. Efficient high voltage pulser for piezoelectric air coupled transducer. Ultrasonics 2013, 53, 225–231. [Google Scholar] [CrossRef] [PubMed]
- Brown, J.A.; Lockwood, G.R. A Low-Cost, High-Performance Pulse Generator for Ultrasound Imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 848–851. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Yen, J.T.; Shung, K.K. A Low-Cost Bipolar Pulse Generator for High-Frequency Ultrasound Applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 443–447. [Google Scholar] [CrossRef] [PubMed]
- Canales, R.V.; Takarabe, E.W.; Maruyama, N.; Furukawa, C.M. Digital Ultrasonic System for Internal Corrosion Assessment on Oil Pipelines. In ABCM Symposium Series Mechatronics; ABCM: Hampton, IA, USA, 2008; pp. 543–551. [Google Scholar]
- Bharath, R.; Kumar, P.; Dusa, C.; Akkala, V.; Puli, S.; Ponduri, H.; Krishna, K.D.; Rajalakshmi, P.; Merchant, S.N.; Mateen, M.A.; et al. FPGA-Based Portable Ultrasound Scanning System with Automatic Kidney Detection. J. Imaging 2015, 1, 193–219. [Google Scholar] [CrossRef] [Green Version]
- Gammell, P.M.; Harris, G.R. IGBT-based Kilovoltage Pulsers for Ultrasound Measurement Applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 1722–1728. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez, J.A.; Vitola, J.; Sandoval, S. Diseño y Construcción de un Sistema de Ultrasonido para la Detección de Discontinuidades en Soldadura. Revista Colombiana de Física 2009, 41, 159–161. [Google Scholar]
- Wu, J.-X.; Du, Y.-C.; Lin, C.-H.; Chen, P.-J.; Chen, T. A Novel Bipolar Pulse Generator for High-frequency Ultrasound System. In Proceedings of the 2013 IEEE International Ultrasonics Symposium (IUS), Prague, Czech Republic, 21–25 July 2013; pp. 1571–1574. [Google Scholar] [CrossRef]
- Ramos, A.; San Emeterio, J.L.; Sanz, P.T. Dependence of pulser driving responses on electrical and motional characteristics of NDE ultrasonic probes. Ultrasonics 2000, 38, 553–558. [Google Scholar] [CrossRef]
- Choi, H.; Woo, P.C.; Yeom, J.-Y.; Yoon, C. Power MOSFET Linearizer of a High-Voltage Power Amplifier for High-Frequency Pulse-Echo Instrumentation. Sensors 2017, 17, 764. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.; Yang, H.-C.; Shung, K.K. Bipolar-power-transistor-based limiter for high frequency ultrasound imaging systems. Ultrasonics 2014, 54, 754–758. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Santhakumar, M.; Asokan, T. A Self-Tuning Proportional-Integral-Derivative Controller for an Autonomous Underwater Vehicle, Based on Taguchi Method. J. Comput. Sci. 2010, 6, 862–871. [Google Scholar] [CrossRef]
- Hernández-Alvarado, R.; García-Valdovinos, L.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural Network-Based Self-Tuning PID Control for Underwater Vehicles. Sensors 2016, 16, 1429. [Google Scholar] [CrossRef] [PubMed]
- Derringer, G.; Suich, R. Simultaneous Optimization of Several Response Variables. J. Qual. Technol. 1980, 12, 214–219. [Google Scholar] [CrossRef]
- Derringer, G. A balancing act-optimizing a products properties. Qual. Prog. 1994, 27, 51–58. [Google Scholar]
- Ogata, K. Discrete-Time Control Systems, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1995; ISBN 9780132161022. [Google Scholar]
- Rodríguez-Olivares, N.A.; Gómez-Hernández, A.; Nava-Balanzar, L.; Jiménez-Hernández, H.; Soto-Cajiga, J.A. FPGA-Based Data Storage System on NAND Flash Memory in RAID 6 Architecture for In-Line Pipeline Inspection Gauges. IEEE Trans. Comput. 2018, 67, 1046–1053. [Google Scholar] [CrossRef]
- Maxim Integrated. MAX14808 Evaluation System Evaluates: MAX14808; Data Sheet: MAX14808EVKIT; Maxim Integrated: San Jose, CA, USA, 2012. [Google Scholar]
- Yuan, S.; Wu, H.; Yin, C. State of Charge Estimation Using the Extended Kalman Filter for Battery Management Systems Based on the ARX Battery Model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef] [Green Version]
- De Wit, C.C.; Siciliano, B.; Bastin, G. Theory of Robot Control; Springer: London, UK, 2012; ISBN 9781447115038. [Google Scholar]
- Pulido, H.G.; Salazar, R.V. Análisis y diseño de Experimentos; McGraw-Hill: New York, NY, USA, 2012; ISBN 9789701065266. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| % Connected Load | Continuous | Discrete |
|---|---|---|
| 10 | ||
| 45 | ||
| 80 |
| % Load | ||||||
|---|---|---|---|---|---|---|
| 10.00 | 0.0 | 0.010 | 80 | 125.0 | 102.00 | 9.0 |
| 5.05 | 0.5 | 1.505 | 45 | 162.5 | 102.50 | 6.0 |
| 5.05 | 0.5 | 1.505 | 45 | 162.5 | 102.50 | 6.0 |
| 10.00 | 1.0 | 0.010 | 10 | 200.0 | 101.70 | 11.7 |
| 0.10 | 1.0 | 0.010 | 80 | 150.0 | 105.00 | 11.8 |
| 10.00 | 1.0 | 3.000 | 80 | 125.0 | 102.50 | 9.0 |
| 10.00 | 0.0 | 3.000 | 10 | 187.5 | 103.95 | 7.5 |
| 0.10 | 1.0 | 3.000 | 10 | 137.5 | 87.95 | 15.0 |
| 0.10 | 0.0 | 3.000 | 80 | 95.0 | 102.50 | 1.0 |
| 0.10 | 0.0 | 0.010 | 10 | 187.5 | 103.60 | 0.2 |
| 10.00 | 1.0 | 3.000 | 80 | 125.0 | 102.50 | 9.0 |
| 10.00 | 0.0 | 0.010 | 80 | 125.0 | 102.00 | 9.0 |
| 0.10 | 1.0 | 3.000 | 10 | 137.5 | 88.00 | 14.8 |
| 5.05 | 0.5 | 1.505 | 45 | 162.5 | 103.50 | 6.0 |
| 0.10 | 0.0 | 0.010 | 10 | 187.5 | 103.50 | 0.2 |
| 10.00 | 1.0 | 0.010 | 10 | 175.0 | 103.50 | 10.5 |
| 5.05 | 0.5 | 1.505 | 45 | 162.5 | 103.50 | 6.0 |
| 10.00 | 0.0 | 3.000 | 10 | 187.5 | 103.50 | 7.5 |
| 0.10 | 1.0 | 0.010 | 80 | 150.0 | 105.00 | 11.8 |
| 0.10 | 0.0 | 3.000 | 80 | 95.0 | 102.50 | 1.0 |
| Control Scheme | Shock Effect | Hammer Effect | |
|---|---|---|---|
| Energy (E) ± 0.01 (E) | Maximum Overshoot (V) ± 0.0001 (V) | Recovery Time (ms) ± 5 (ms) | |
| PID tuned with SOSR | 467.45 | 127.7106 | 0 |
| PI tuned with ADM | 6335.32 | 122.7571 | 90 |
| PID tuned with NN | 0 | 98.5457 | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Olivares, N.A.; Cruz-Cruz, J.V.; Gómez-Hernández, A.; Hernández-Alvarado, R.; Nava-Balanzar, L.; Salgado-Jiménez, T.; Soto-Cajiga, J.A. Improvement of Ultrasonic Pulse Generator for Automatic Pipeline Inspection. Sensors 2018, 18, 2950. https://doi.org/10.3390/s18092950
Rodríguez-Olivares NA, Cruz-Cruz JV, Gómez-Hernández A, Hernández-Alvarado R, Nava-Balanzar L, Salgado-Jiménez T, Soto-Cajiga JA. Improvement of Ultrasonic Pulse Generator for Automatic Pipeline Inspection. Sensors. 2018; 18(9):2950. https://doi.org/10.3390/s18092950
Chicago/Turabian StyleRodríguez-Olivares, Noé Amir, José Vicente Cruz-Cruz, Alejandro Gómez-Hernández, Rodrigo Hernández-Alvarado, Luciano Nava-Balanzar, Tomás Salgado-Jiménez, and Jorge Alberto Soto-Cajiga. 2018. "Improvement of Ultrasonic Pulse Generator for Automatic Pipeline Inspection" Sensors 18, no. 9: 2950. https://doi.org/10.3390/s18092950
APA StyleRodríguez-Olivares, N. A., Cruz-Cruz, J. V., Gómez-Hernández, A., Hernández-Alvarado, R., Nava-Balanzar, L., Salgado-Jiménez, T., & Soto-Cajiga, J. A. (2018). Improvement of Ultrasonic Pulse Generator for Automatic Pipeline Inspection. Sensors, 18(9), 2950. https://doi.org/10.3390/s18092950