Experimental Study on Residual Bending Strength of Corroded Reinforced Concrete Beam Based on Micromagnetic Sensor


Abstract
1. Introduction
2. Experimental Details and Theoretical Background
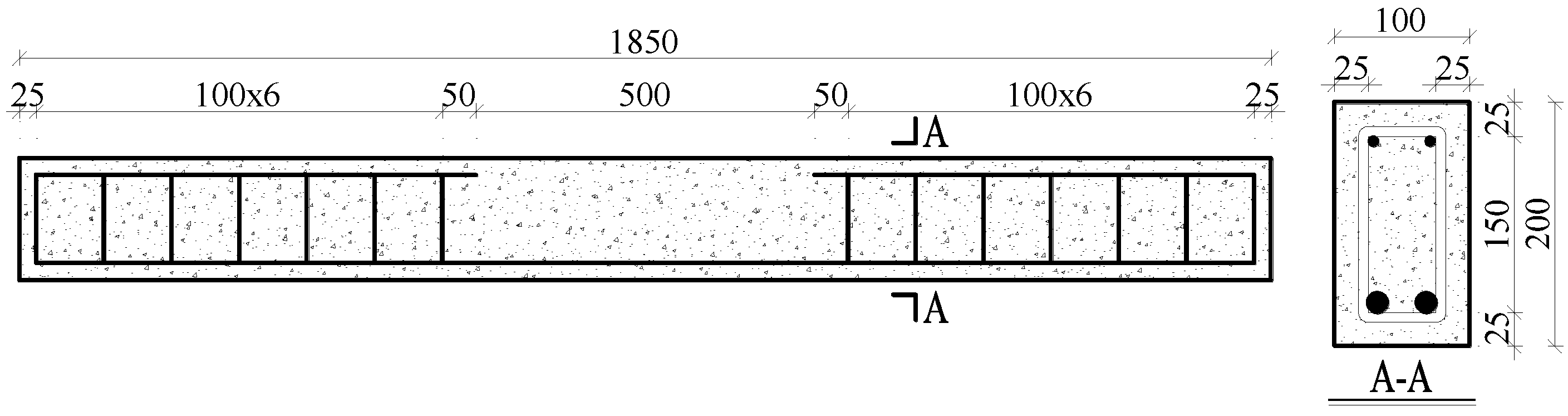
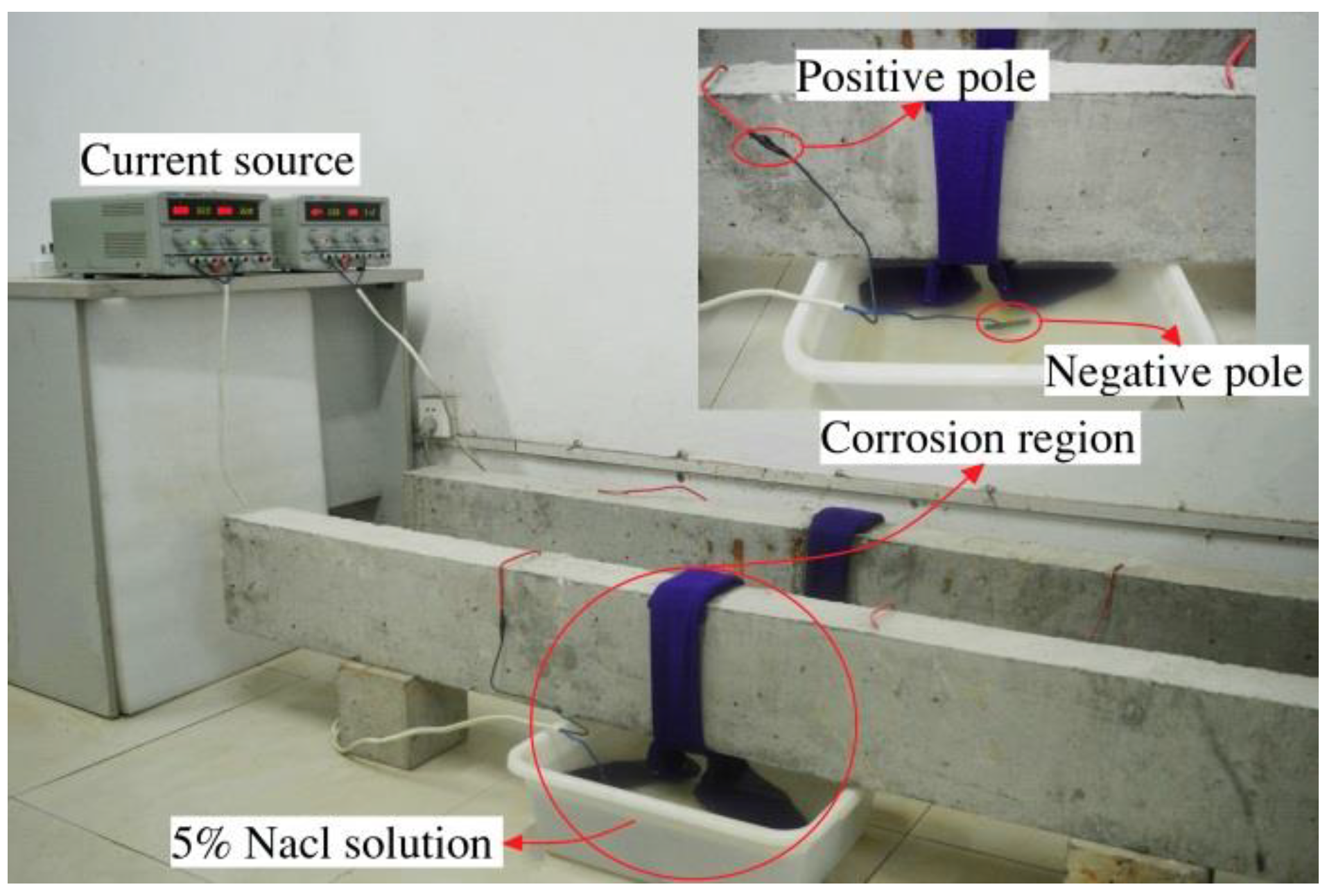
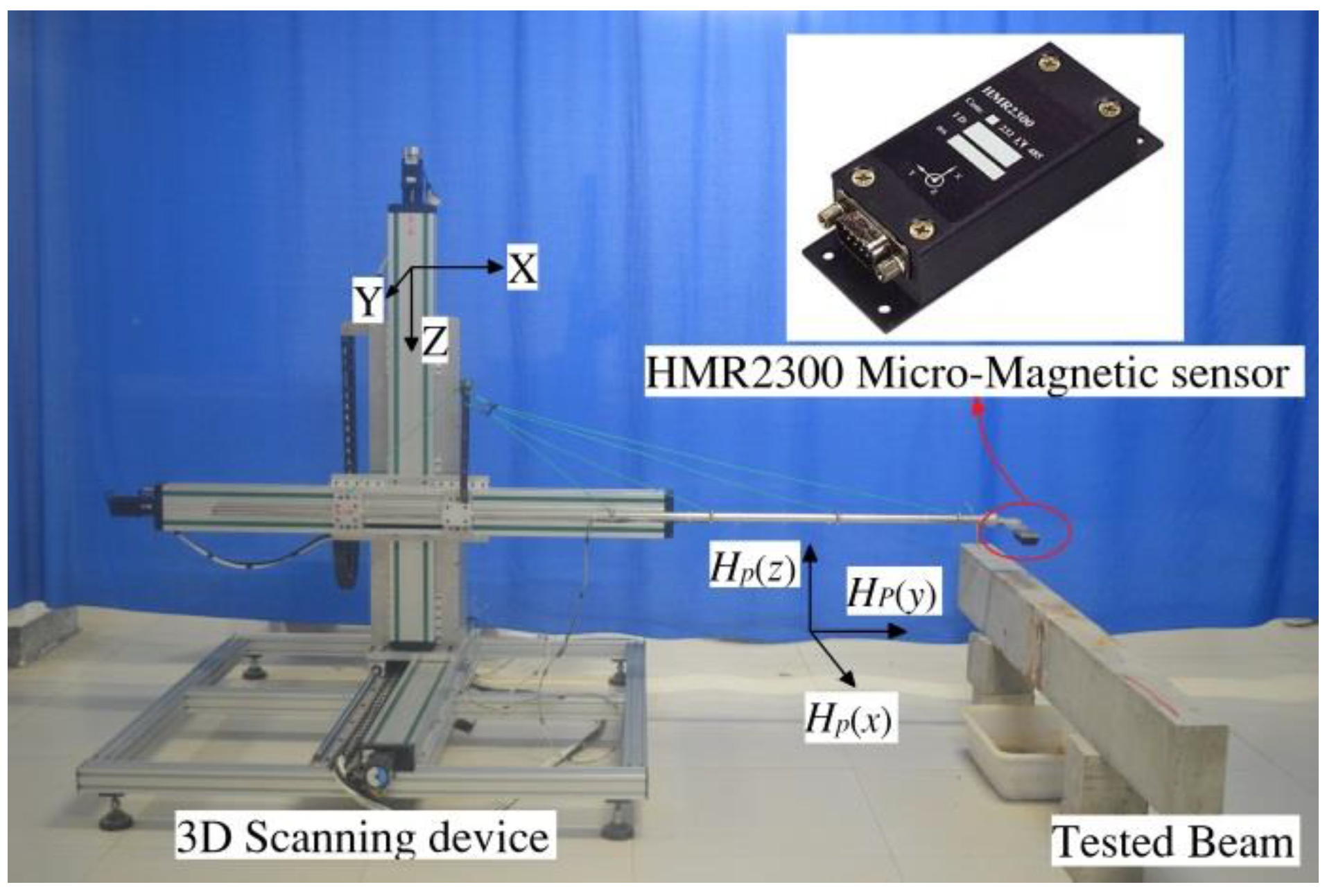
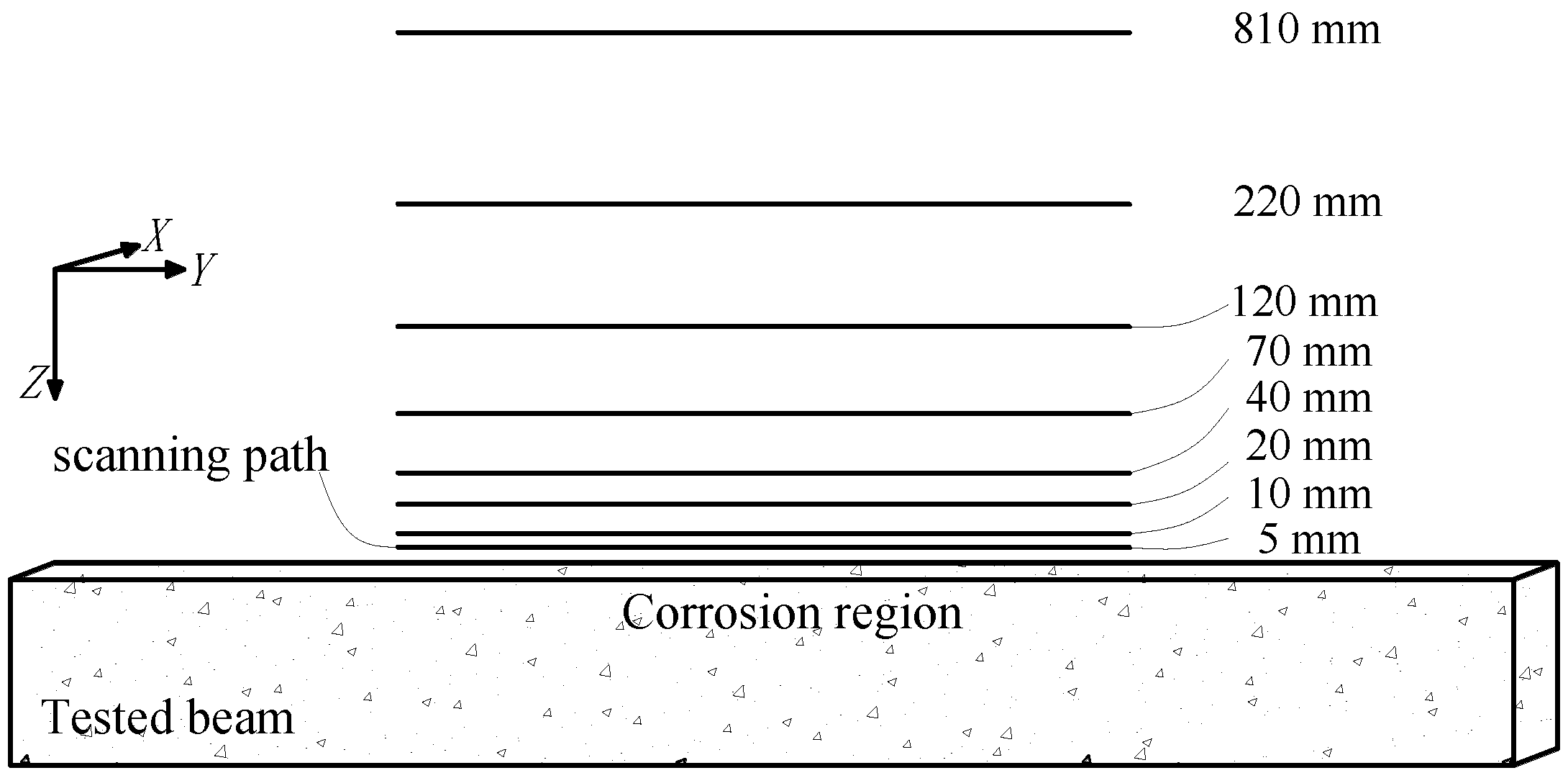
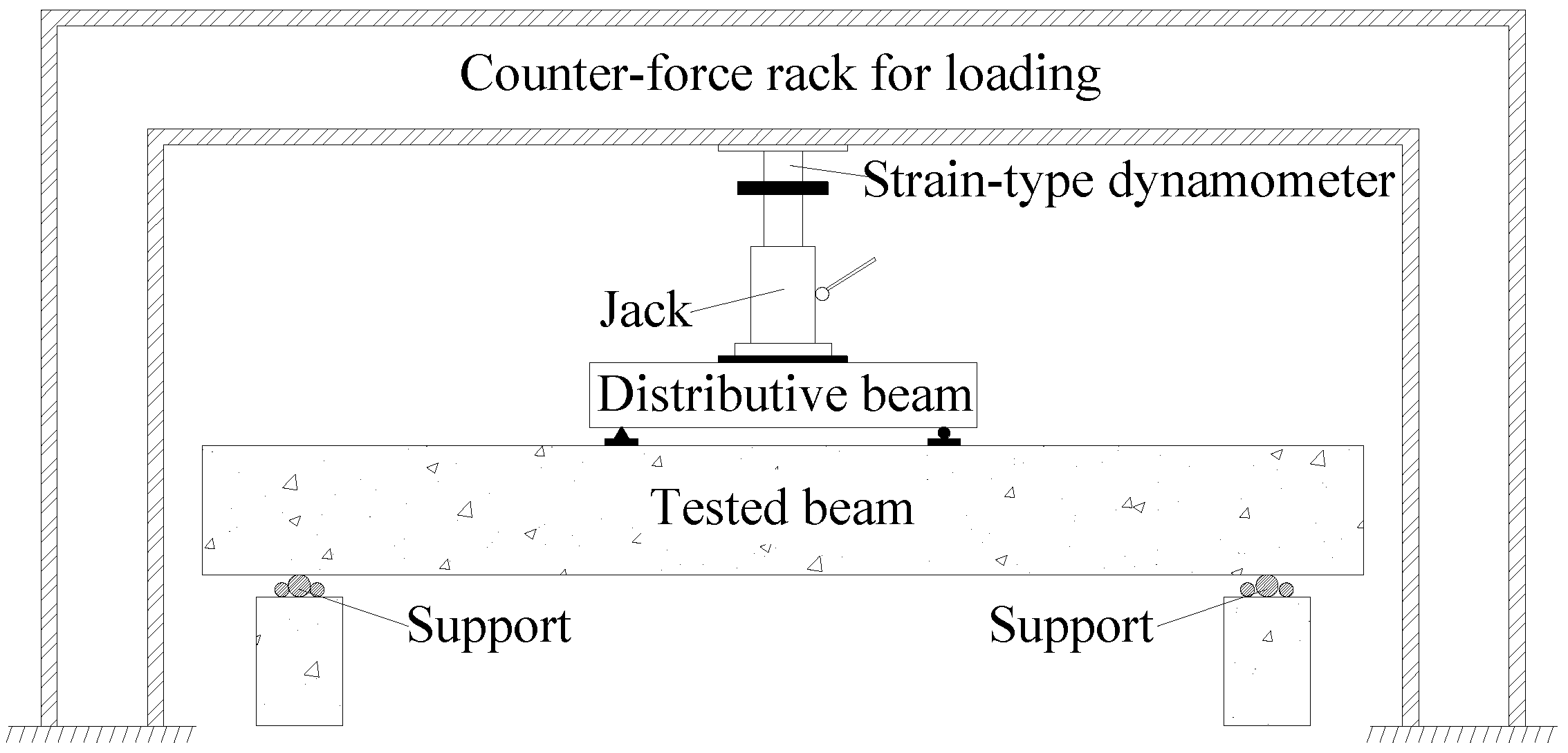
2.1. Experimental Details Based on Micromagnetic Sensor
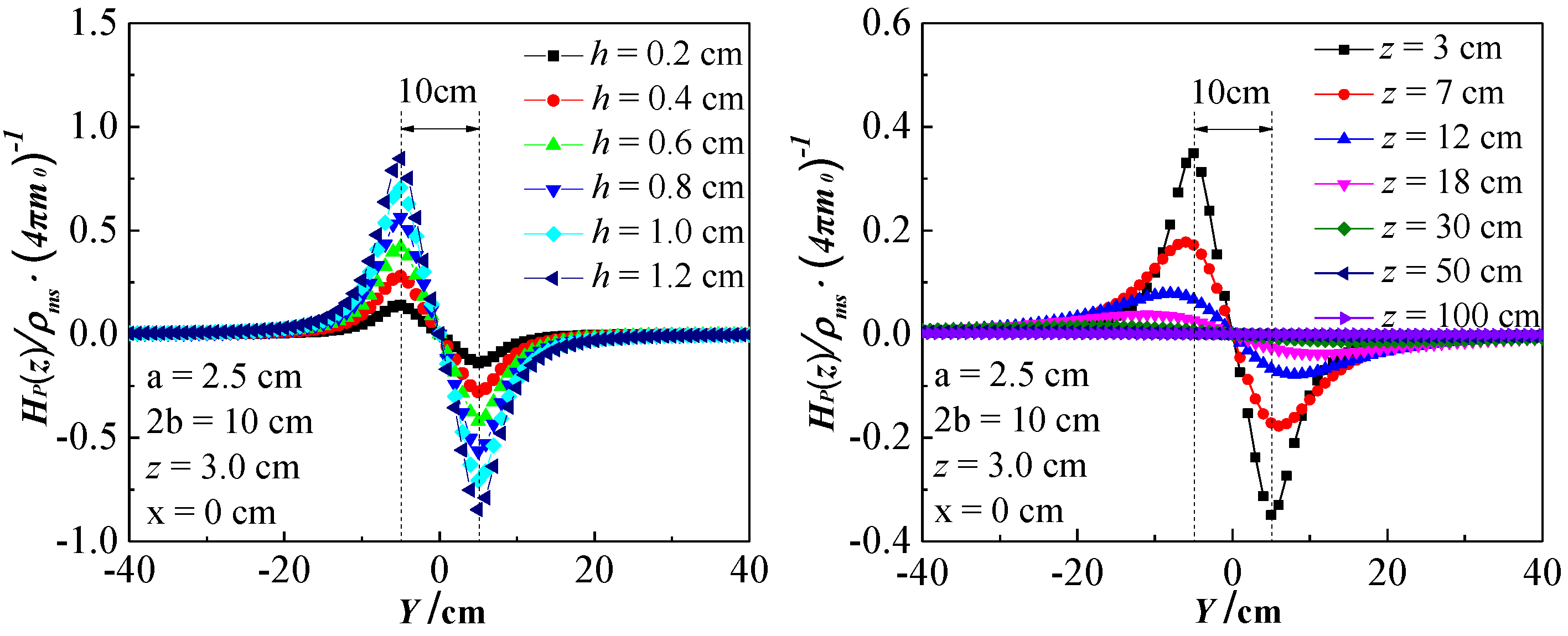
2.2. Theoretical Background Based on Magnetic Dipole Model
3. Results and Discussion
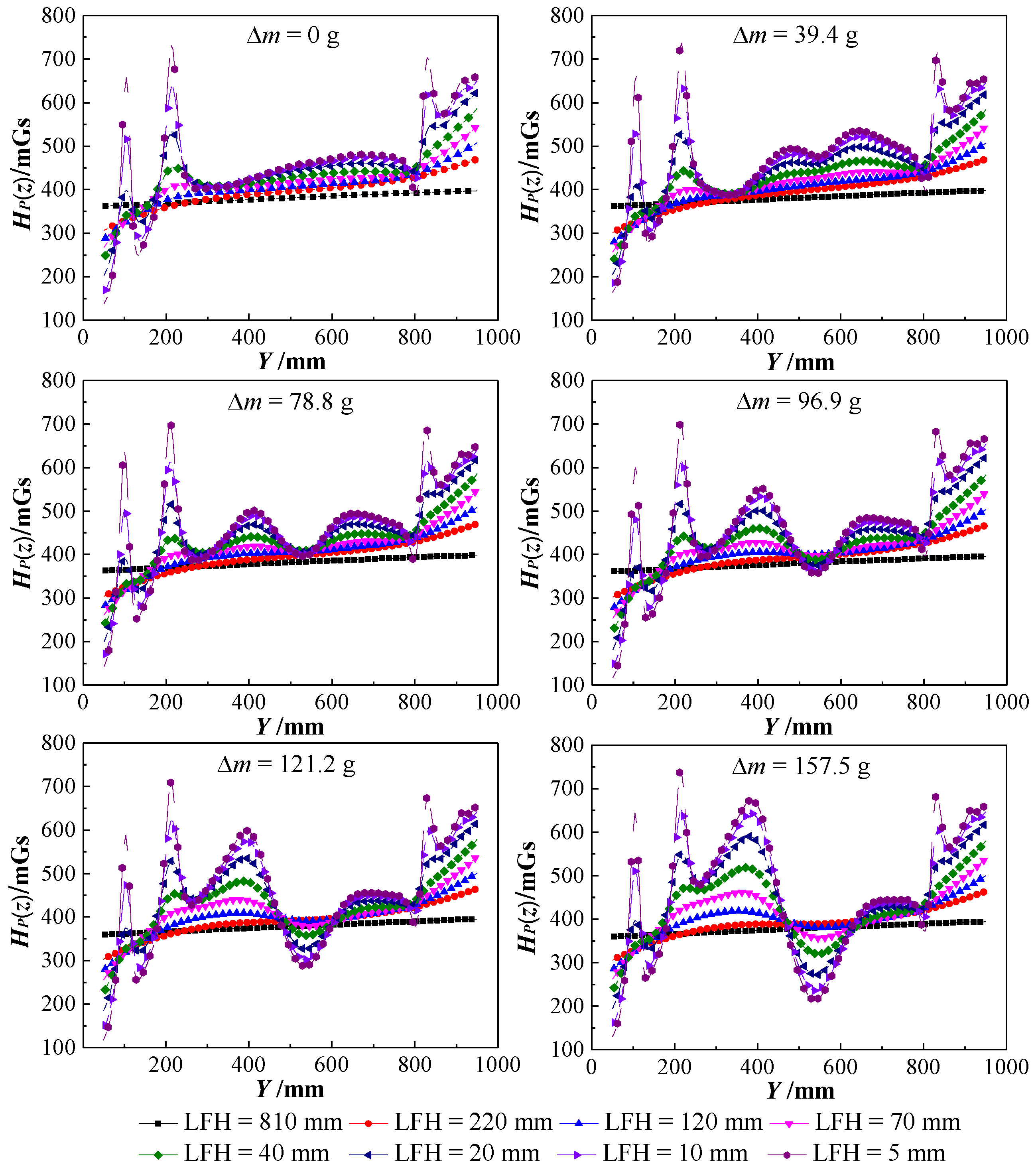
3.1. Experimental Measurement Results of SMFL Signal
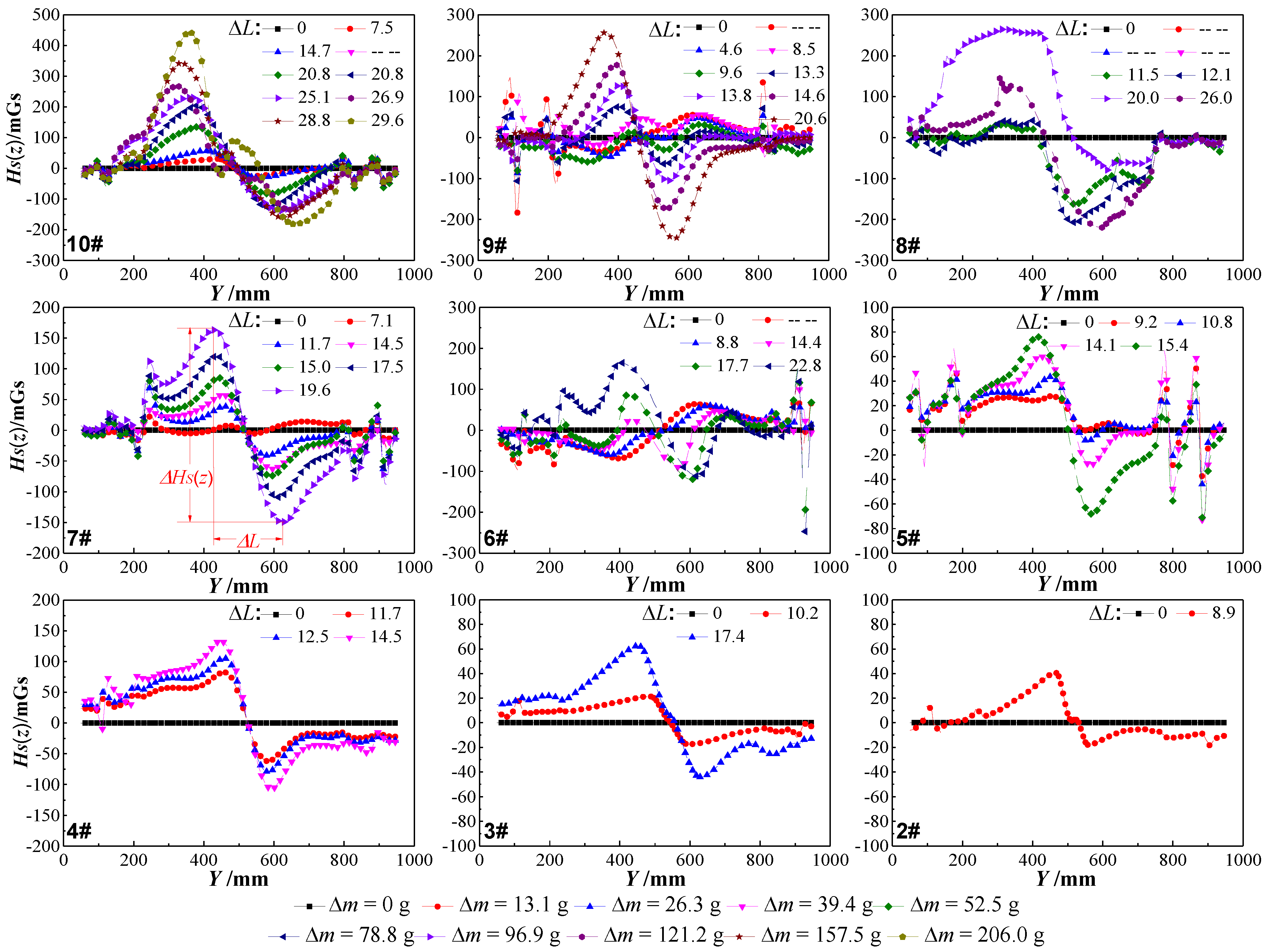
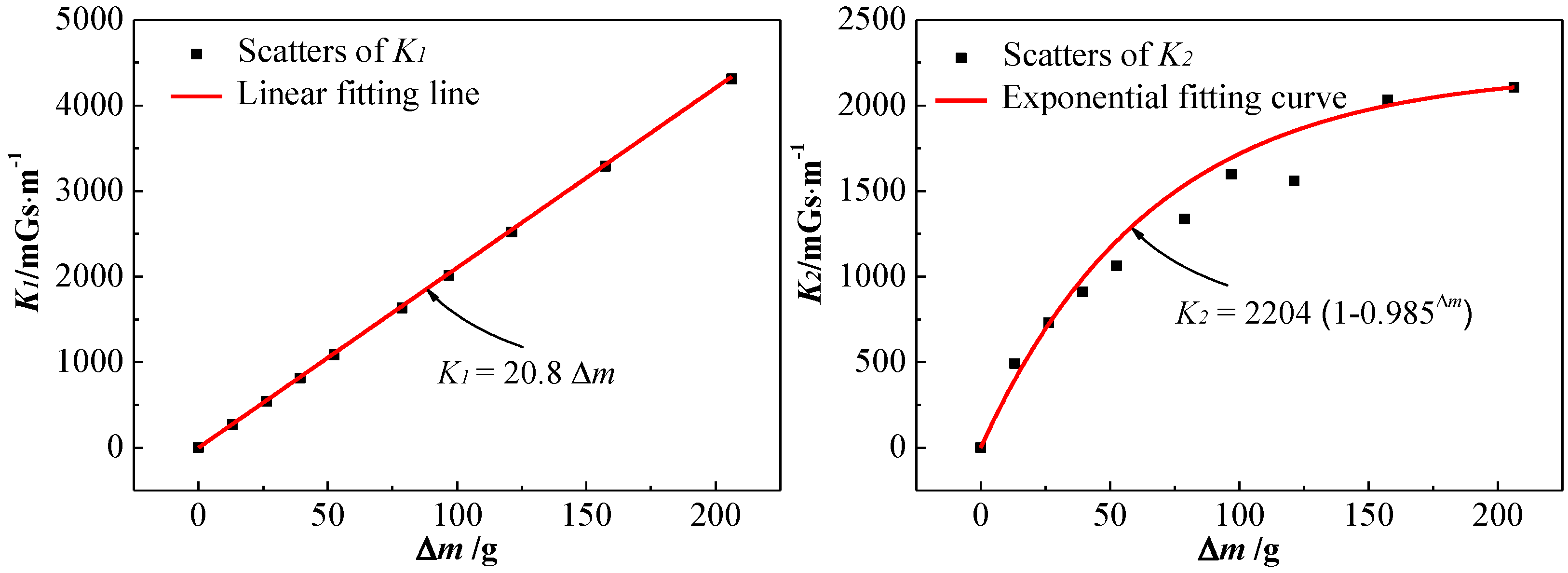
3.2. Analysis of SMFL Signal
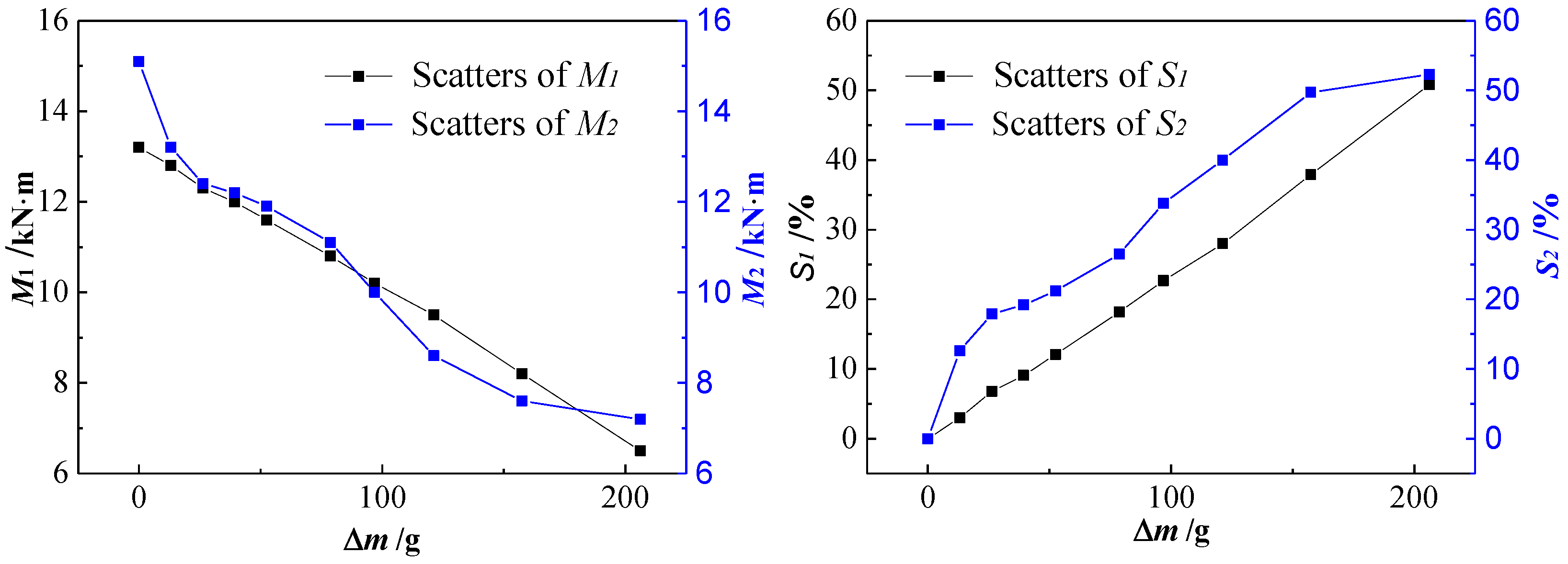
3.3. Analysis of Bending Strength
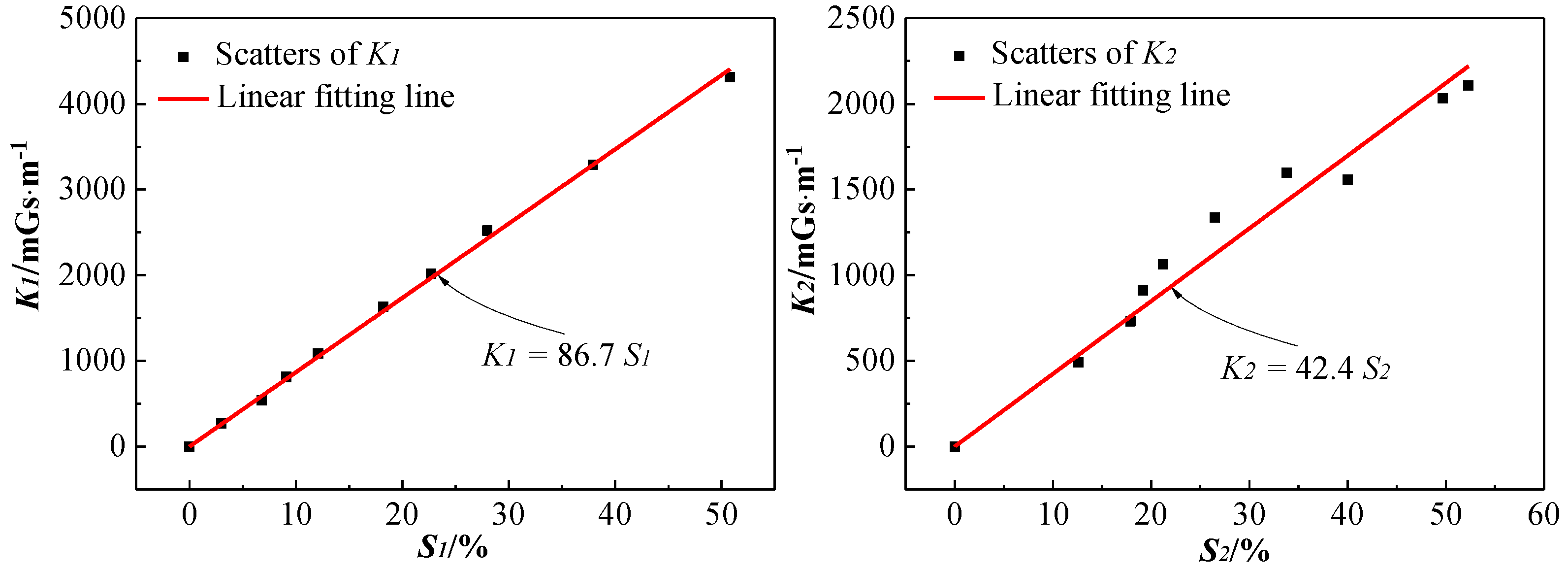
3.4. Analysis of Relationship Between SMFL Signal and Bending Strength
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Davis, M.; Hoult, N.A.; Scott, A. Distributed strain sensing to assess corroded RC beams. Eng. Struct. 2017, 6, 473–482. [Google Scholar] [CrossRef]
- Zhao, Y.; Karimi, A.R.; Wong, H.S.; Hu, B.; Nick, R.B. Comparison of uniform and nonuniform corrosion induced damage in reinforced concrete based on a Gaussian description of the corrosion layer. Corros. Sci. 2011, 53, 2803–2814. [Google Scholar] [CrossRef]
- Yoon, I.-S. Comprehensive Approach to Calculate Oxygen Diffusivity of Cementitious Materials Considering Carbonation. Int. J. Concr. Struct. Mater. 2018, 12, 1–10. [Google Scholar] [CrossRef]
- Zhao, X.; Gong, P.; Qiao, G.; Lu, J.; Lv, X.; Ou., J. Brillouin corrosion expansion sensors for steel reinforced concrete structures using a fiber optic coil winding method. Sensors 2011, 11, 10798–10819. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Ho, S.C.M.; Song., G. Corrosion detection of steel reinforced concrete using combined carbon fiber and fiber Bragg grating active thermal probe. Smart Mater. Struct. 2016, 25, 045017. [Google Scholar] [CrossRef]
- Li, W.; Xu, C.; Ho, S.C.M.; Wang, B.; Song, G. Monitoring concrete deterioration due to reinforcement corrosion by integrating acoustic emission and FBG strain measurements. Sensors 2017, 17, 657. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Almond, D.P.; Rees, D.A.S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 2011, 22, 035701. [Google Scholar] [CrossRef]
- Khodayar, F.; Lopez, F.; Ibarra-Castanedo, C.; Maldague, X. Parameter Optimization of Robotize Line Scan Thermography for CFRP Composite Inspection. J. Nondestr. Eval. 2018, 37, 5. [Google Scholar] [CrossRef]
- Khodayar, F.; Lopez, F.; Ibarra-Castanedo, C.; Maldague, X. Optimization of the inspection of large composite materials using robotized line scan thermography. J. Nondestr. Eval. 2017, 36, 32. [Google Scholar] [CrossRef]
- Gao, B.; He, Y.; Woo, W.L.; Tian, G.Y.; Liu, J.; Hu, Y. Multidimensional tensor-based inductive thermography with multiple physical fields for offshore wind turbine gear inspection. IEEE Trans. Ind. Electron. 2016, 63, 6305–6315. [Google Scholar] [CrossRef]
- Gao, B.; Lu, P.; Woo, W.L.; Tian, G.Y. Variational Bayesian Sub-group Adaptive Sparse Component Extraction for Diagnostic Imaging System. IEEE Trans. Ind. Electron. 2018, 65, 8142–8152. [Google Scholar] [CrossRef]
- Zhang, H.; Robitaille, F.; Grosse, C.U.; Ibarra-Castanedo, C.; Martins, J.O.; Sfarra, S.; Maldague, X.P.V. Optical excitation thermography for twill/plain weaves and stitched fabric dry carbon fibre preform inspection. Composites Part: A Appl. Sci.Manuf. 2018, 107, 282–293. [Google Scholar] [CrossRef]
- Sfarra, S.; Marcucci, E.; Ambrosini, D.; Paoletti, D. Infrared exploration of the architectural heritage: from passive infrared thermography to hybrid infrared thermography (HIRT) approach. Materiales. De Construcción. 2016, 60. [Google Scholar] [CrossRef]
- Grager, J.C.; Kotschate, D.; Gamper, J.; Gaal, M.; Pinkert, K.; Mooshofer, H.; Goldammer, M.; Grosse, C.U. Advances in air-coupled ultrasonic testing combining an optical microphone with novel transmitter concepts. In Proceedings of the 12th European conference on Non-Destructive Testing, Gothenburg, Sweden, 11–15 June 2018. [Google Scholar]
- Amini, M.H.; Sinclair, A.N.; Coyle, T.W. A new high-temperature ultrasonic transducer for continuous inspection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 63, 448–455. [Google Scholar] [CrossRef] [PubMed]
- Wu, D.; Liu, Z.; Wang, X.; Su, L. Composite magnetic flux leakage detection method for pipelines using alternating magnetic field excitation. NDT E Int. 2017, 91, 148–155. [Google Scholar] [CrossRef]
- Dubov, A.A. A study of metal properties using the method of magnetic memory. Met. Sci. Heat Treat. 1997, 39, 401–405. [Google Scholar] [CrossRef]
- Piotrowski, L.; Chmielewski, M.; Augustyniak, B. On the correlation between magnetoacoustic emission and magnetostriction dependence on the applied magnetic field. J. Magn. Magn. Mater. 2016, 410, 34–40. [Google Scholar] [CrossRef]
- Rocío, N.A.M.; Nicolás, N.; Isabel, L.P.M.; José, R.; Linilson, P. Magnetic barkhausen noise and magneto-acoustic emission in stainless steel plates. Procedia Mater. Sci. 2015, 8, 674–682. [Google Scholar] [CrossRef]
- Wang, Z.D.; Yao, K.; Deng, B.; Ding, K.Q. Quantitative study of metal magnetic memory signal versus local stress concentration. NDT E Int. 2010, 43, 513–518. [Google Scholar] [CrossRef]
- Coronelli, D.; Gambarova, P. Structrural assessment of corroded reinforced concrete beams: modeling guidelines. J. Struct. Eng. 2004, 130, 1214–1224. [Google Scholar] [CrossRef]
- Xia, R.; Zhou, J.; Zhang, H.; Liao, L.; Zhao, R.Q.; Zhang, Z. Quantitative Study on Corrosion of Steel Strands Based on Self-Magnetic Flux Leakage. Sensors 2018, 18, 1396. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; He, Y.Y.; Zhang, H.; Fernandes, H.; Fu, Y.; Maldague, X. Study on characteristics of magnetic memory testing signal based on the stress concentration field. IET Sci. Meas. Technol. 2017, 11, 2–8. [Google Scholar] [CrossRef]
- Liu, B.; Cao, Y.; Zhang, H.; Lin, Y.R.; Sun, W.R.; Xu, B. Weak magnetic flux leakage: A possible method for studying pipeline defects located either inside or outside the structures. NDT E Int. 2015, 74, 81–86. [Google Scholar] [CrossRef]
- Liu, B.; He, L.; Zhang, H.; Cao, Y.; Fernandes, H. The axial crack testing model for long distance oil-gas pipeline based on magnetic flux leakage internal inspection method. Measurement 2017, 103, 275–282. [Google Scholar] [CrossRef]
- Zhang, H.; Liao, L.; Zhao, R.Q.; Zhou, J.; Yang, M.; Xia, R. The nondestructive test of steel corrosion in reinforced concrete bridges using a micromagnetic sensor. Sensors 2016, 16, 1439. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Liao, L.; Zhao, R.Q.; Zhou, J.; Yang, M.; Zhao, Y. A new judging criterion for corrosion testing of reinforced concrete based on self-magnetic flux leakage. Int. J. Appl. Electromagnet Mech. 2017, 54, 123–130. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, C.; Sun, M.; Li, Z. An innovative corrosion evaluation technique for reinforced concrete structures using magnetic sensors. Constr. Build. Mater. 2017, 135, 68–75. [Google Scholar] [CrossRef]
- Polydorides, N.; Georghiou, G.E.; Kim, D.H.; Won, C. Subspace constrained regularization for corrosion detection with magnetic induction tomography. NDT & E Int. 2008, 41, 510–516. [Google Scholar]
- Sun, B.; Dong, P.; Wang, C.; Pu, X.; Wu, Y. Quantitative analysis of magnetic anomaly of reinforcements in bored in situ concrete pilesℜ. Appl. Geophys. 2009, 6, 275–286. [Google Scholar] [CrossRef]
- Orbe, A.; Rojí, E.; Losada, R.; Cuadrado., J. Calibration patterns for predicting residual strengths of steel fibre reinforced concrete (SFRC). Composites Part. B Eng. 2014, 58, 408–417. [Google Scholar] [CrossRef]
- Krause, H.-J.; Wolf, W.; Glaas, W.; Zimmermann, E.; Faley, M.I.; Sawade, G.; Mattheus, R.; Neudert, G.; Gampe, U.; Krieger, J. SQUID array for magnetic inspection of prestressed concrete bridges. Physica. C Supercond. 2002, 368, 91–95. [Google Scholar] [CrossRef]
- Fernandes, B.T.; Silva, I.; Gaydecki, P.A. Vector extraction from digital images of steel bars produced by an inductive scanning system using a differential gradient method combined with a modified Hough transform. NDT E Int. 2000, 33, 69–75. [Google Scholar] [CrossRef]
- Szielasko, K.; Youssef, S.; Sourkov, A.; Kurz, J.; Pushkarev, S.; Birringer, R. Magnetic flux leakage detection of corrosion damage in prestressed concrete poles. Electroamgentic Nondestr. Eval. (XVIII) 2015, 40, 203–210. [Google Scholar]
- Ahmad, S. Reinforcement corrosion in concrete structures, its monitoring and service life prediction—A review. Cem. Concr.Compos. 2003, 25, 459–471. [Google Scholar] [CrossRef]
- Huang, H.; Yao, J.; Li, Z.; Liu, Z. Residual magnetic field variation induced by applied magnetic field and cyclic tensile stress. NDT E Int. 2014, 63, 38–42. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Label | Material | Cement | Water | Sand | Stone | Standard Strength (Mpa) | Design Strength (Mpa) |
| Concrete | C30 | Unit dosage (kg/m3) | 461 | 175 | 512 | 1252 | fck = 20.1 | fcd = 14.3 |
| weight ratio | 1 | 0.38 | 1.11 | 2.72 | ftk = 2.01 | ftd = 1.43 | ||
| Item | Reinforcement | Yield Strength (Mpa) | Design Strength (Mpa) | |||||
| Steel bars | Tensile bars: 2Φ14; Stirrup: Φ8@100 | fyk = 335 | fyd = 300 | |||||
| Parameter | No. | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1# | 2# | 3# | 4# | 5# | 6# | 7# | 8# | 9# | 10# | |
| Corrosion current/A | 1.05 | 1.05 | 1.05 | 1.05 | 1.05 | 1.05 | 1.05 | 1.05 | 1.05 | 1.05 |
| Corrosion time/h | 0 | 12 | 24 | 36 | 48 | 72 | 96 | 120 | 156 | 504 |
| Δm/g | 0 | 13.1 | 26.3 | 39.4 | 52.5 | 78.8 | 96.9 | 121.2 | 157.5 | 206.0 |
| Parameter | Δm/g | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 13.1 | 26.3 | 39.4 | 52.5 | 78.8 | 96.9 | 121.2 | 157.5 | 206.2 | |
| ΔHS(z)Ea/mGs ΔLEa/cm R/% h/cm A ρms/mGs ΔHS(z)T/mGs K1/mGs·m−1 K2/mGs·m−1 | 0 - 100 0 0 - 0 0 0 | 44.6 9.1 96.4 0.050 0.037 7574 40.4 269.5 490.1 | 84.1 11.5 92.80 0.101 0.075 7046 81.0 540.0 731.3 | 120.4 13.2 89.2 0.151 0.112 6754 121.7 811.6 912.1 | 159.5 15.0 85.6 0.202 0.150 6681 162.6 1084 1063 | 230.0 17.2 78.4 0.302 0.225 6423 244.8 1632 1337 | 313.0 19.6 73.4 0.372 0.278 7074 302.1 2014 1597 | 350.6 22.5 66.8 0.465 0.348 6330 377.9 2520 1558 | 501.8 24.7 56.8 0.605 0.454 6945 493.2 3288 2032 | 623.4 29.6 43.5 0.791 0.595 6583 646.5 4310 2106 |
| Parameter | No. | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1# | 2# | 3# | 4# | 5# | 6# | 7# | 8# | 9# | 10# | |
| Δm/g M1/(KN·m) S1/% F/kN M2/(KN·m) S2/% | 0 13.2 0 48.7 15.1 0 | 13.1 12.8 3.0 42.6 13.2 12.6 | 26.3 12.3 6.8 40.0 12.4 17.9 | 39.4 12.0 9.1 39.4 12.2 19.2 | 52.5 11.6 12.1 38.4 11.9 21.2 | 78.8 10.8 18.2 35.8 11.1 26.5 | 96.9 10.2 22.7 32.3 10.0 33.8 | 121.2 9.5 28.0 27.7 8.6 40.0 | 157.5 8.2 37.9 24.5 7.6 49.7 | 206.0 6.5 50.8 23.2 7.2 52.3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Qiu, J.; Zhou, Y.; Zhou, Y.; Xia, R. Experimental Study on Residual Bending Strength of Corroded Reinforced Concrete Beam Based on Micromagnetic Sensor. Sensors 2018, 18, 2635. https://doi.org/10.3390/s18082635
Zhou J, Qiu J, Zhou Y, Zhou Y, Xia R. Experimental Study on Residual Bending Strength of Corroded Reinforced Concrete Beam Based on Micromagnetic Sensor. Sensors. 2018; 18(8):2635. https://doi.org/10.3390/s18082635
Chicago/Turabian StyleZhou, Jianting, Junli Qiu, Yingxin Zhou, Yi Zhou, and Runchuan Xia. 2018. "Experimental Study on Residual Bending Strength of Corroded Reinforced Concrete Beam Based on Micromagnetic Sensor" Sensors 18, no. 8: 2635. https://doi.org/10.3390/s18082635
APA StyleZhou, J., Qiu, J., Zhou, Y., Zhou, Y., & Xia, R. (2018). Experimental Study on Residual Bending Strength of Corroded Reinforced Concrete Beam Based on Micromagnetic Sensor. Sensors, 18(8), 2635. https://doi.org/10.3390/s18082635