Design of a Multiband Global Navigation Satellite System Radio Frequency Interference Monitoring Front-End with Synchronized Secondary Sensors


Abstract
:1. Introduction
2. Materials and Methods
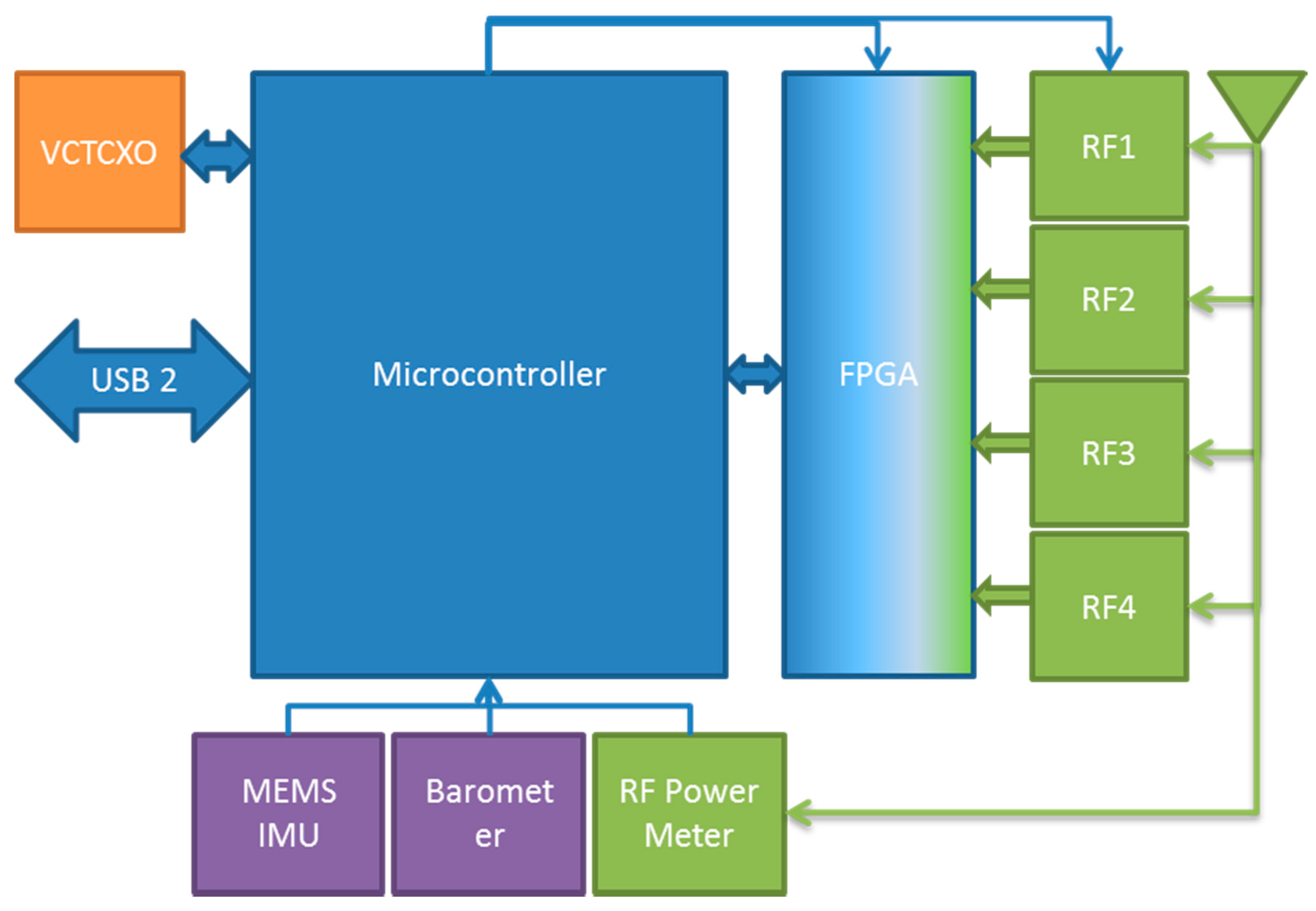
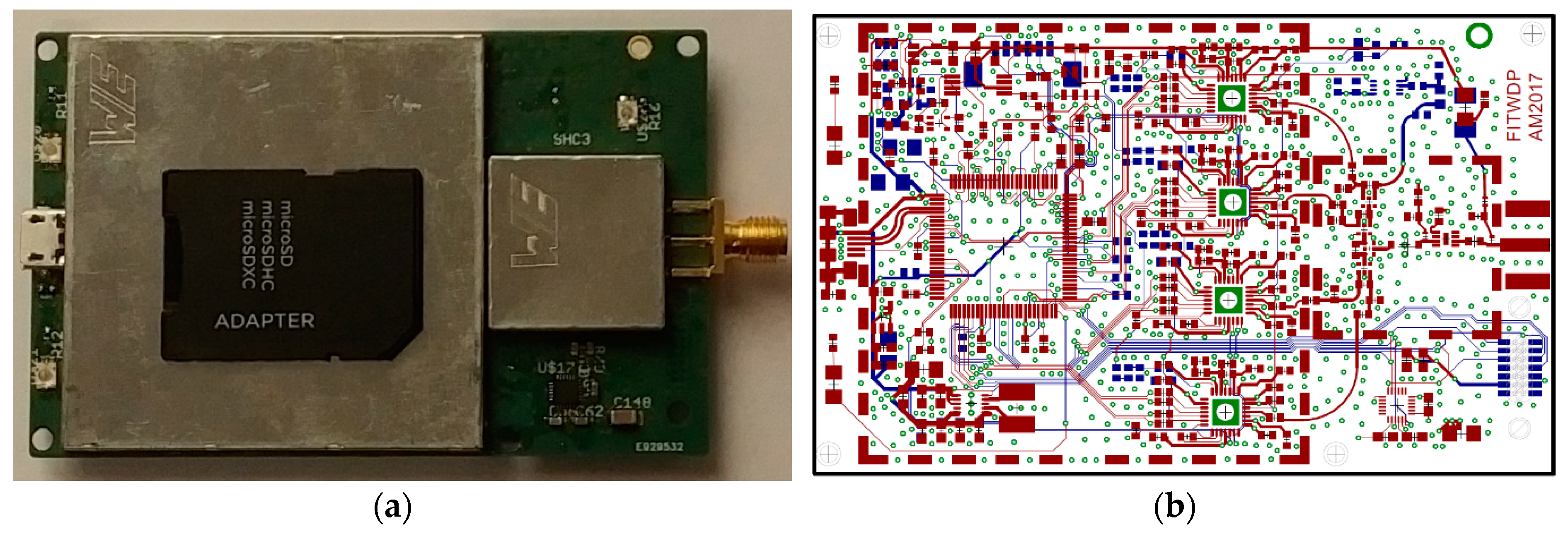
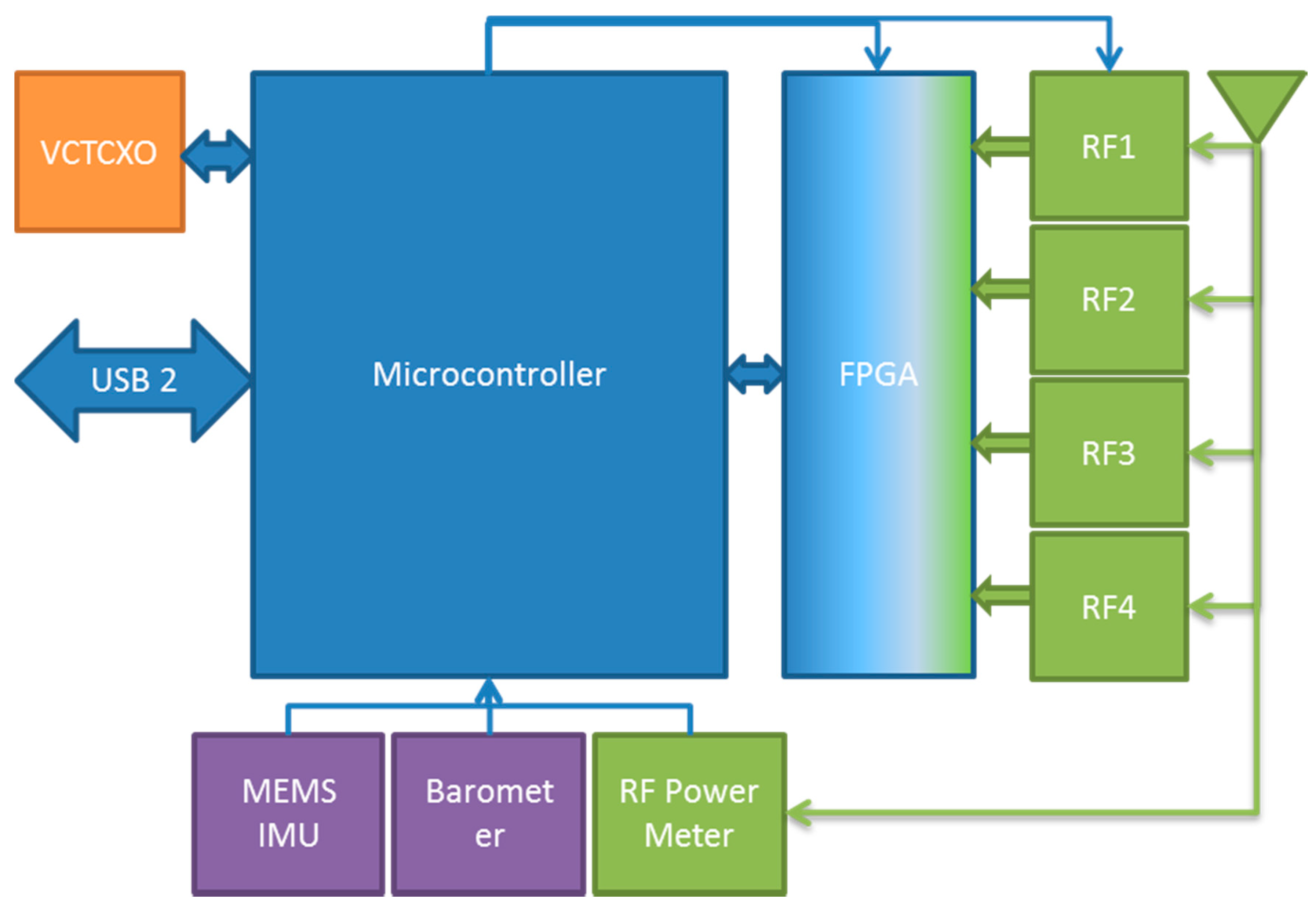
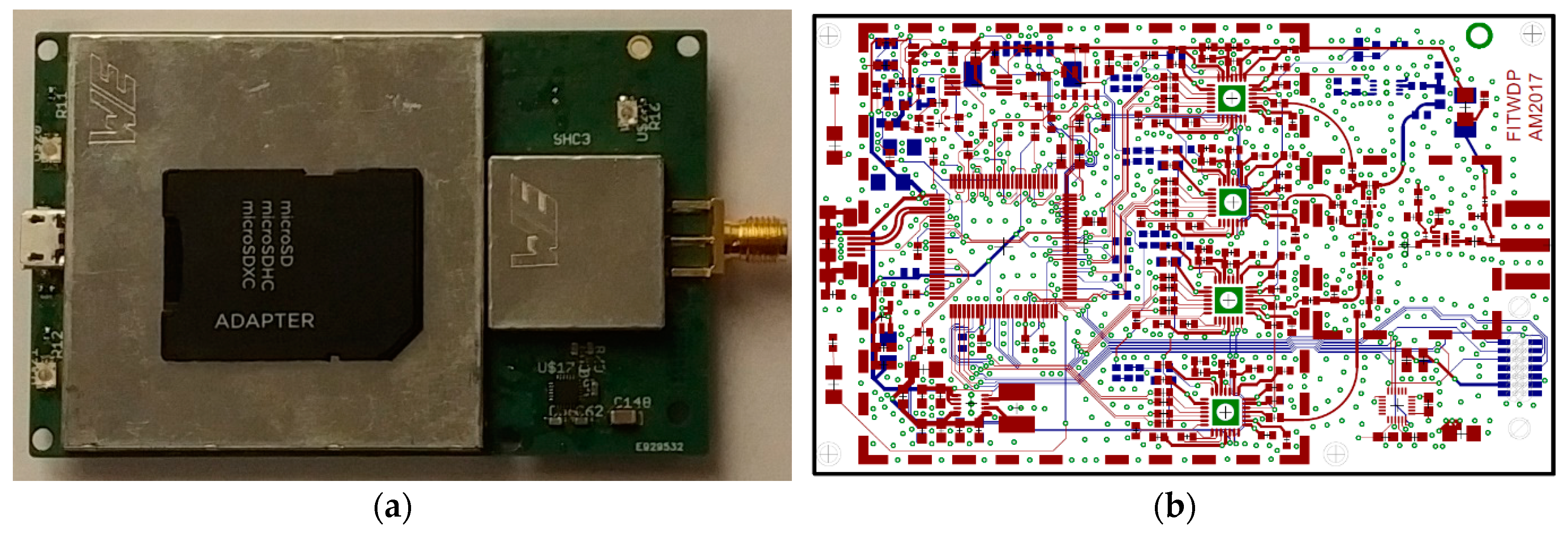
2.1. Hardware Design
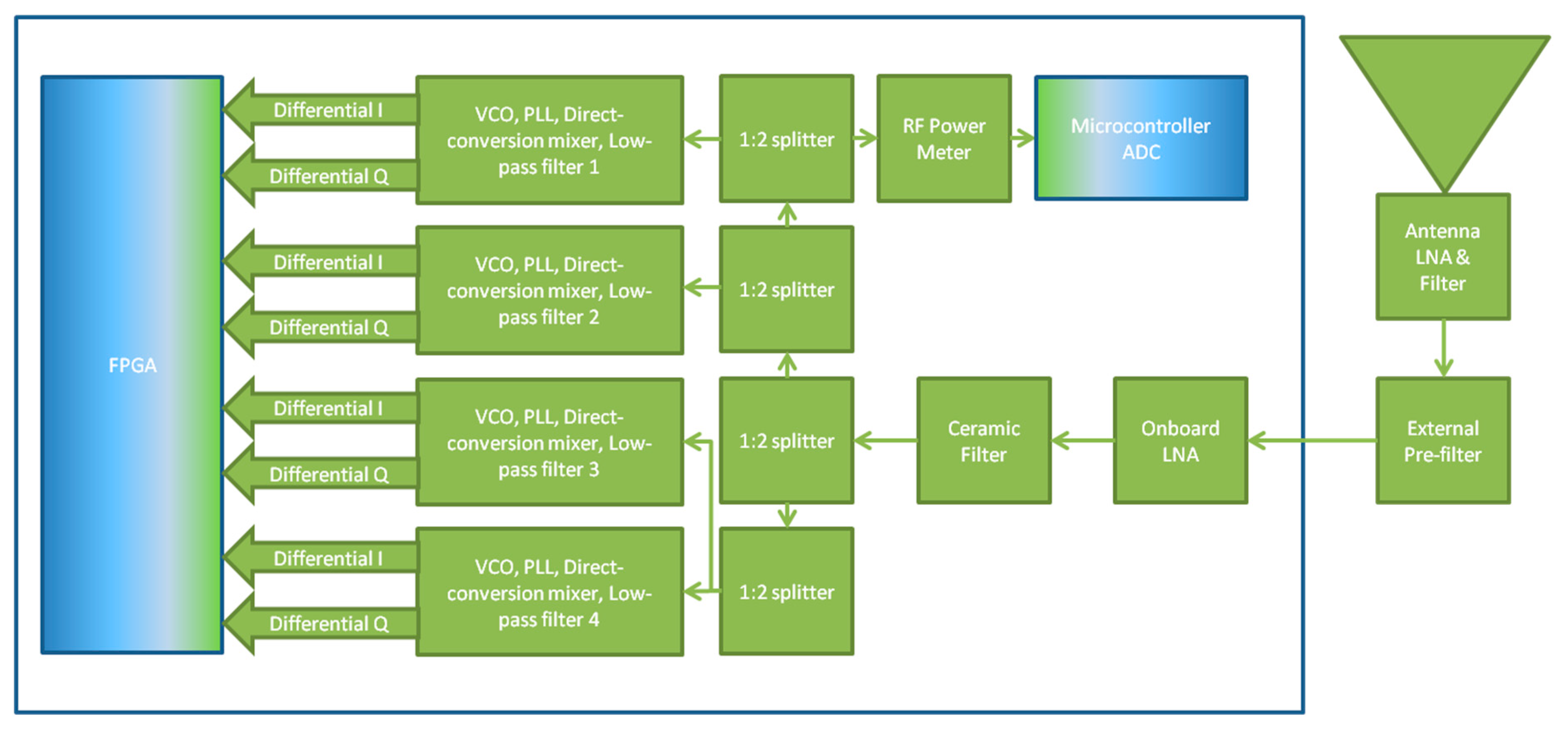
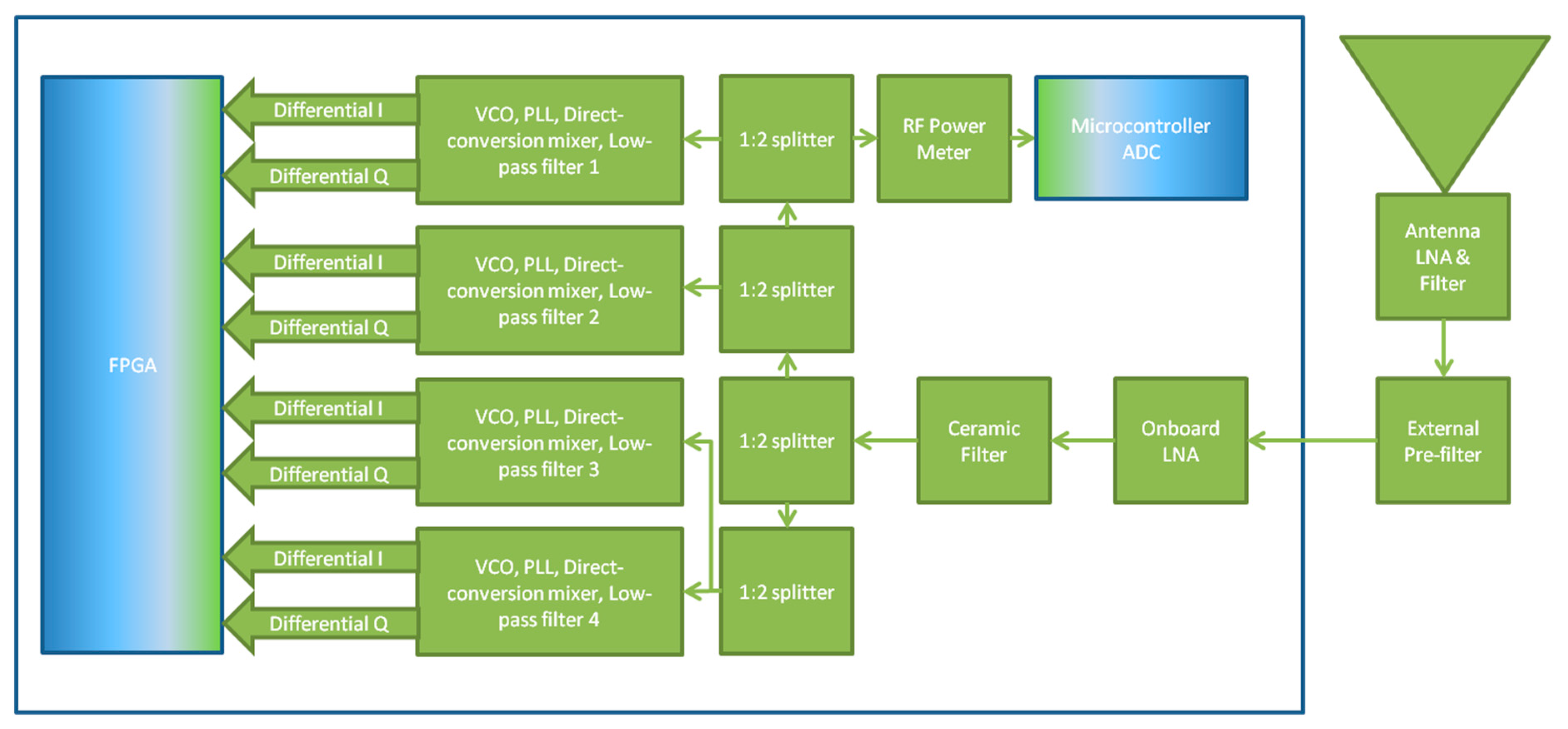
2.1.1. RF Signal Handling
2.1.2. RF Signal Measurement and Conversion
2.1.3. Sampling, Quantization, and Data Packing
2.1.4. Secondary Sensor Synchronization
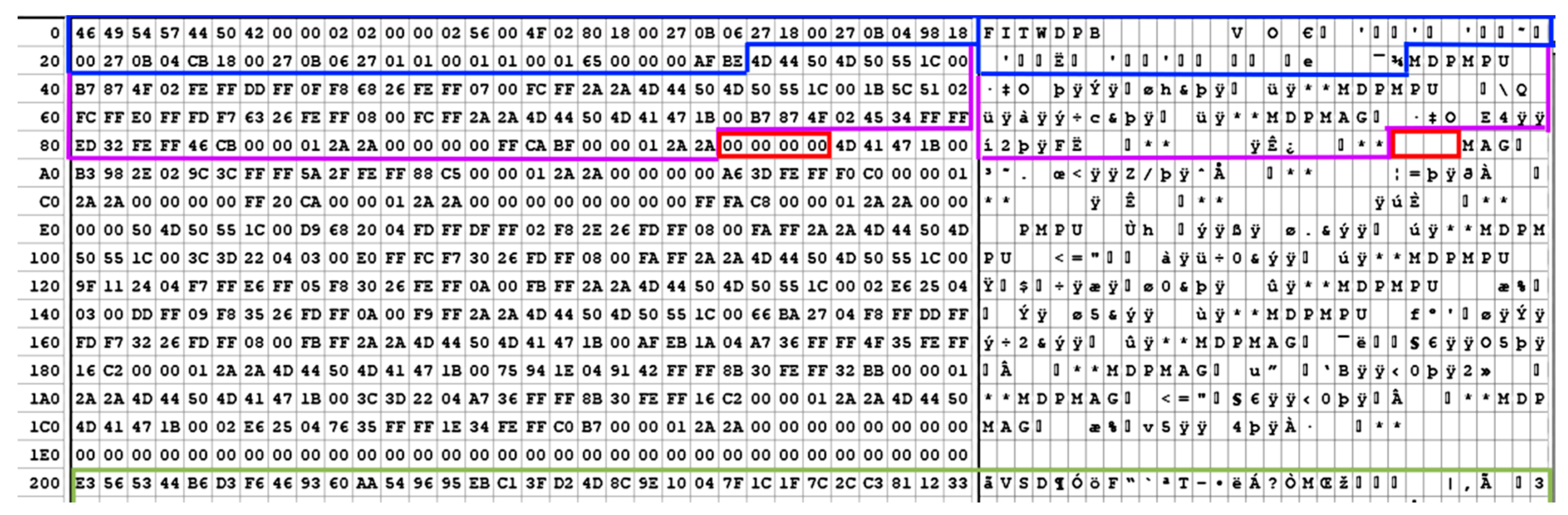
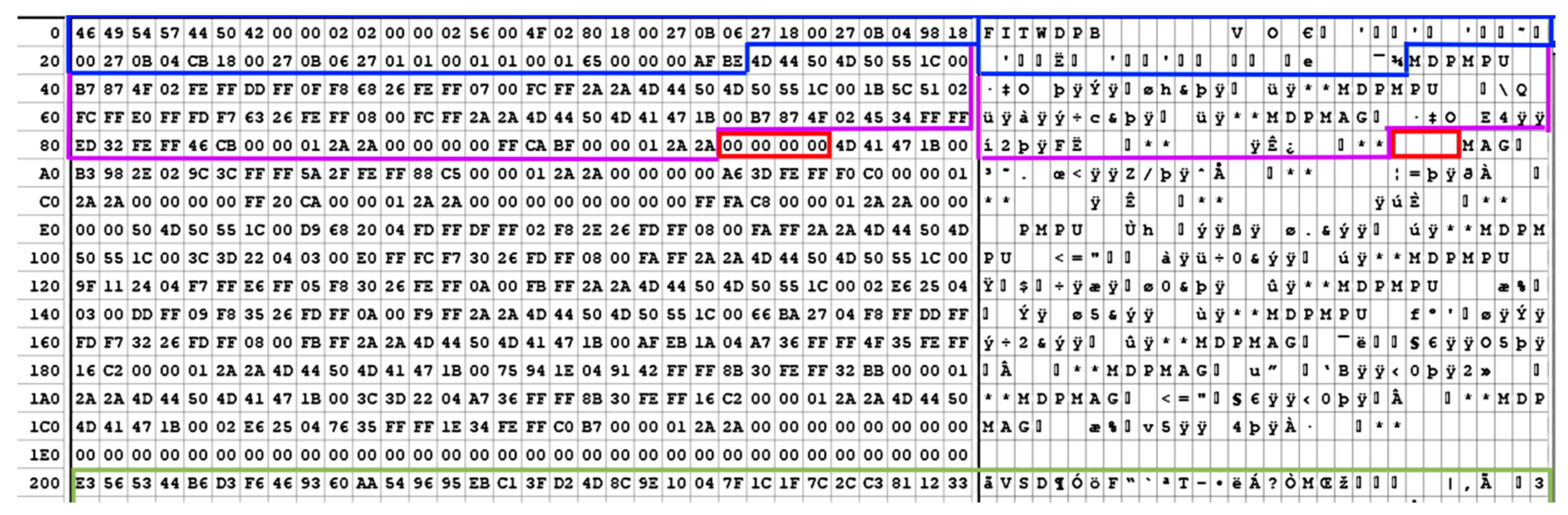
2.1.5. Data Formatting and Sensor Data Side-Channel
2.1.6. Real-Time Monitoring
2.1.7. Post-Mission Decoding and Result Production
3. Results
3.1. Deployment
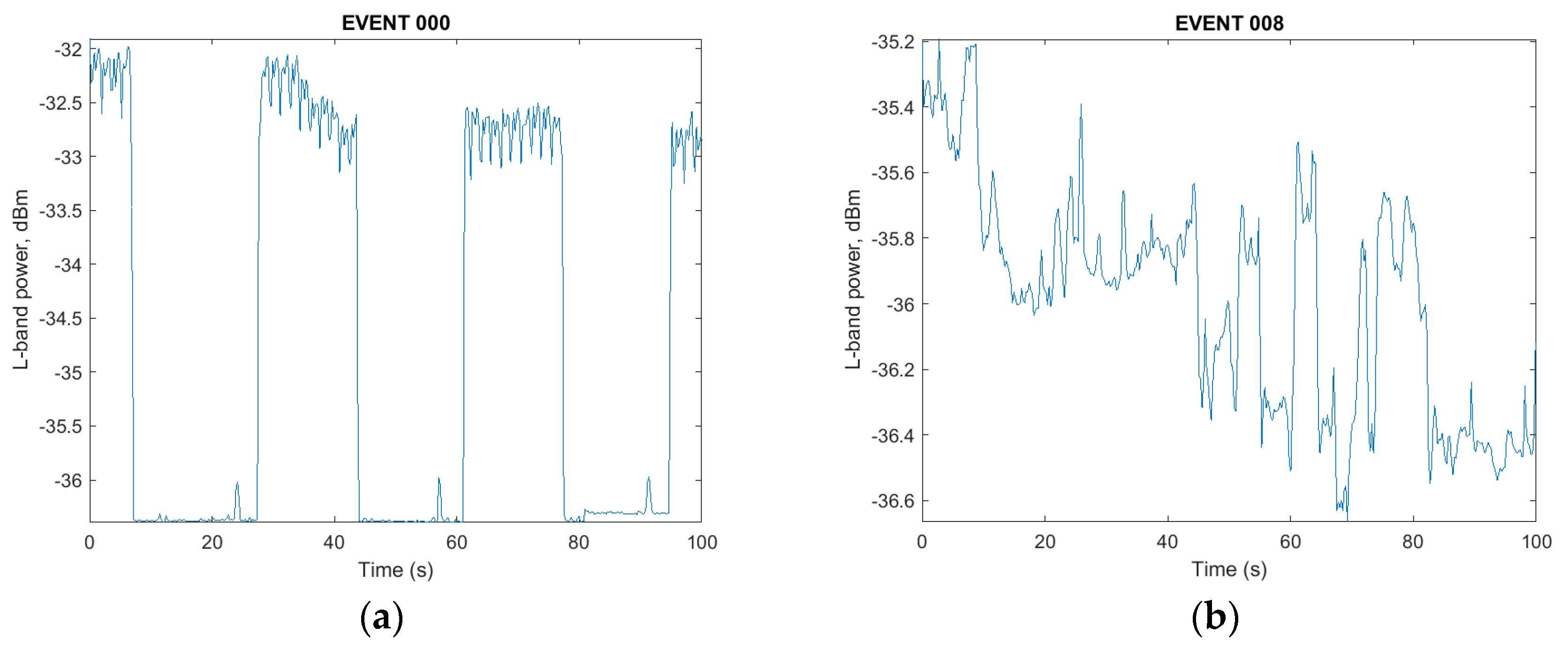
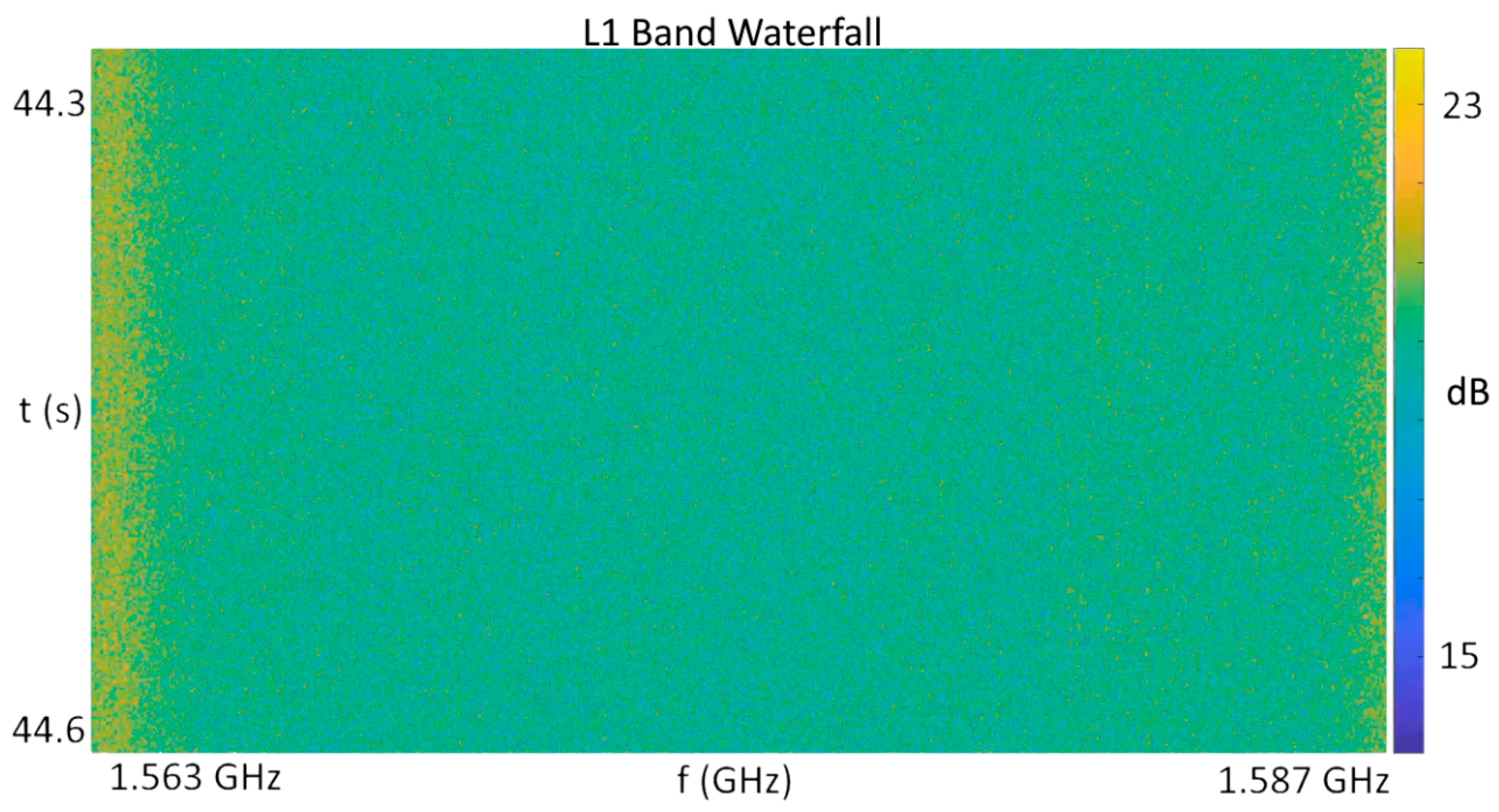
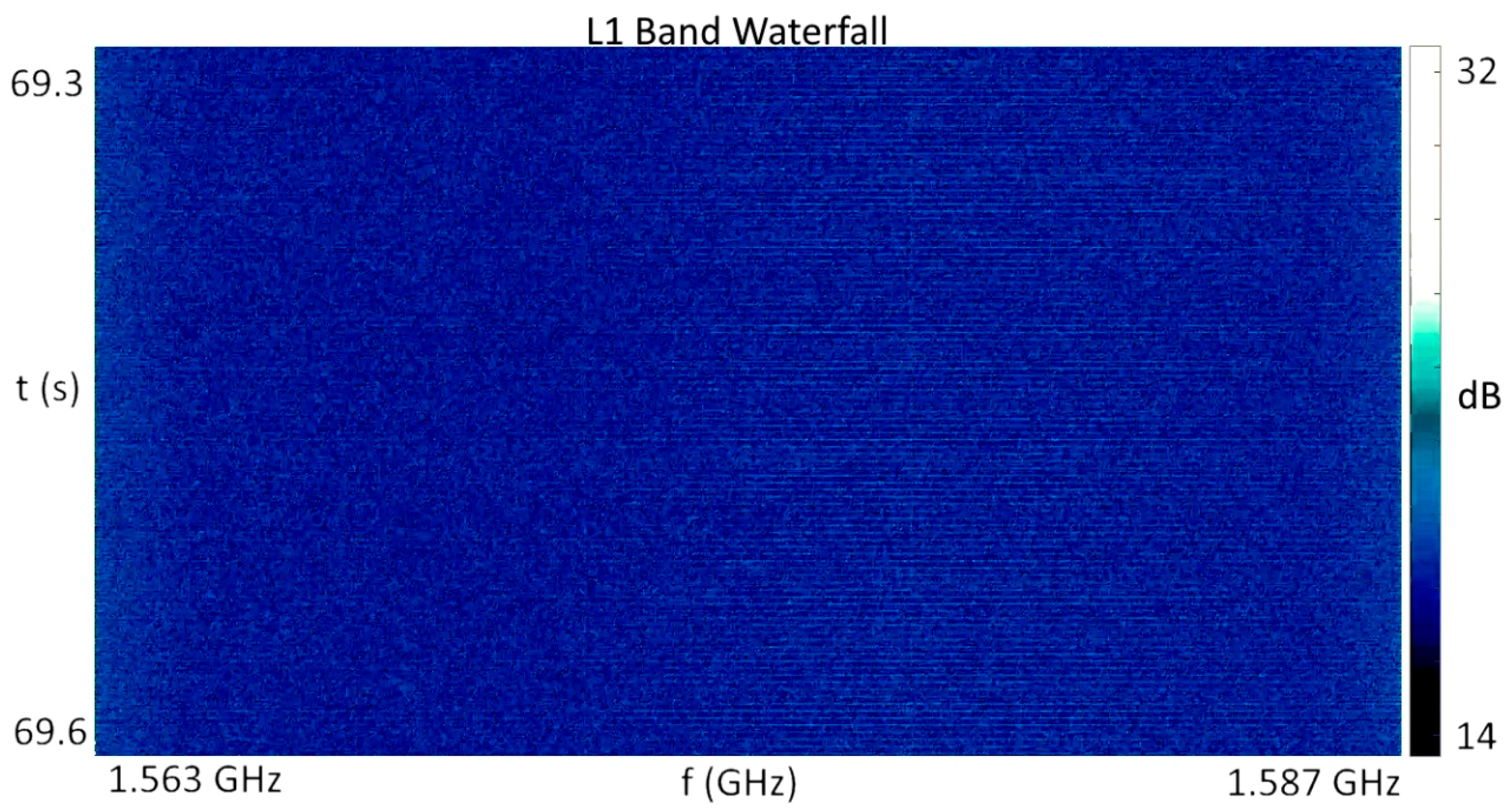
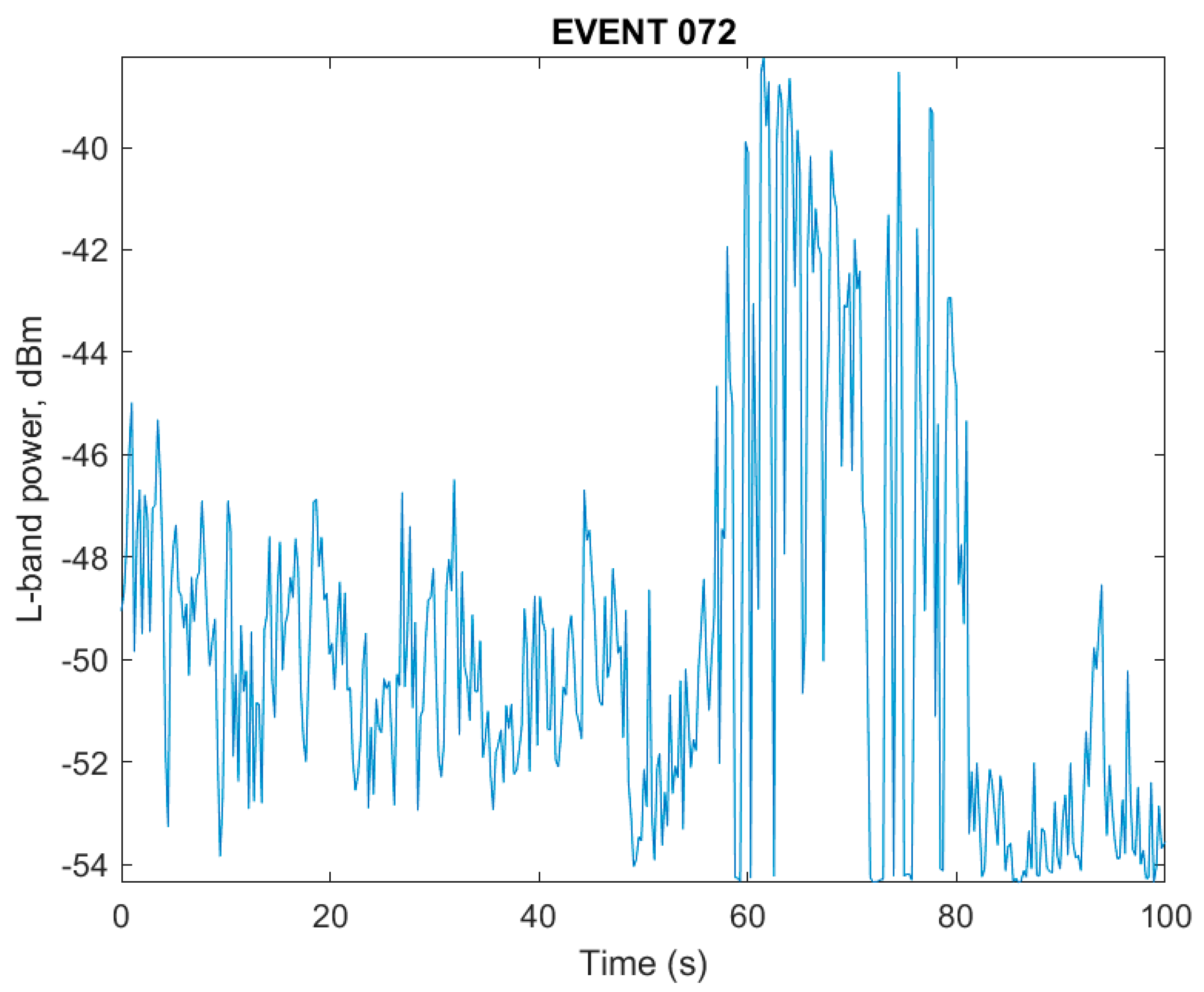
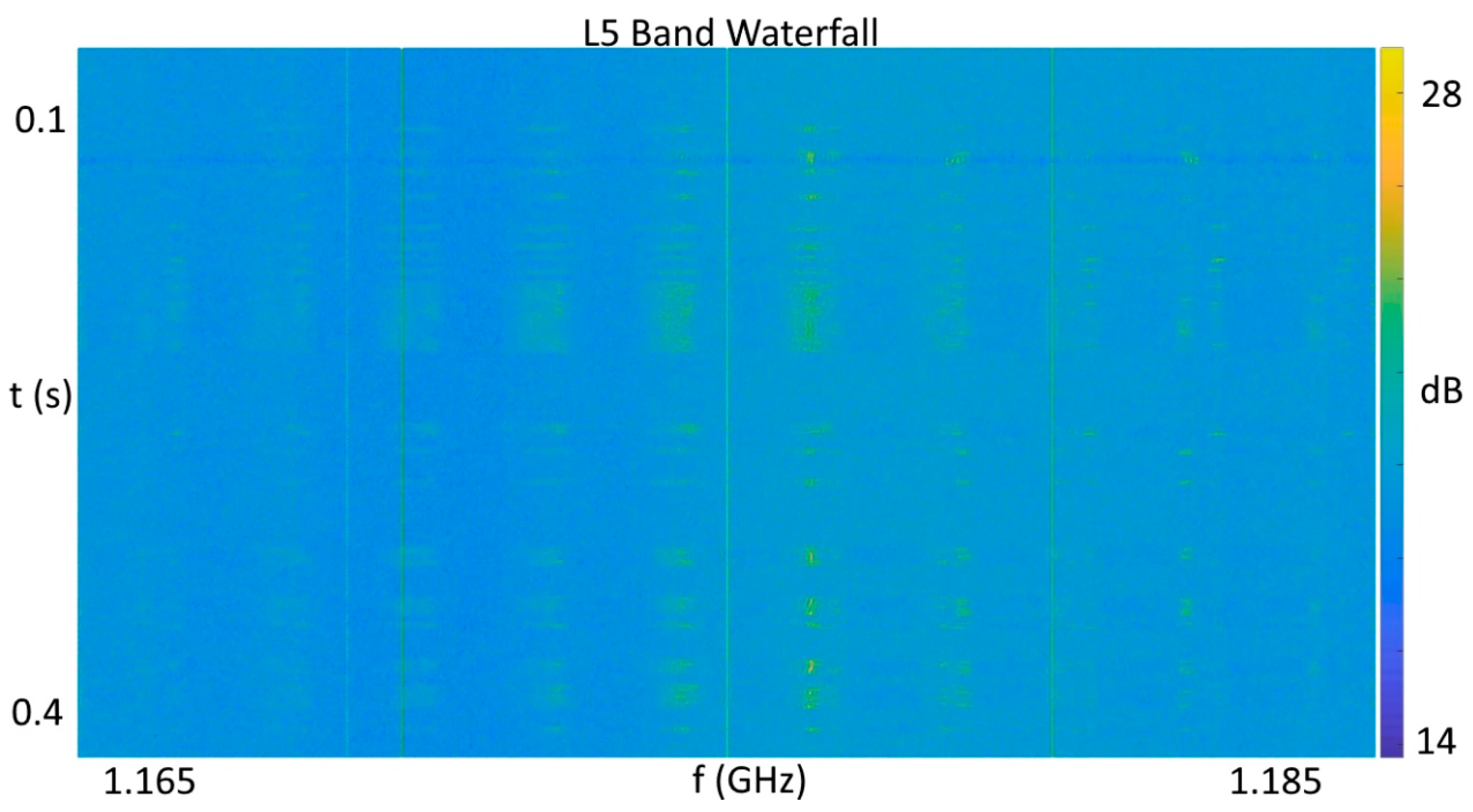
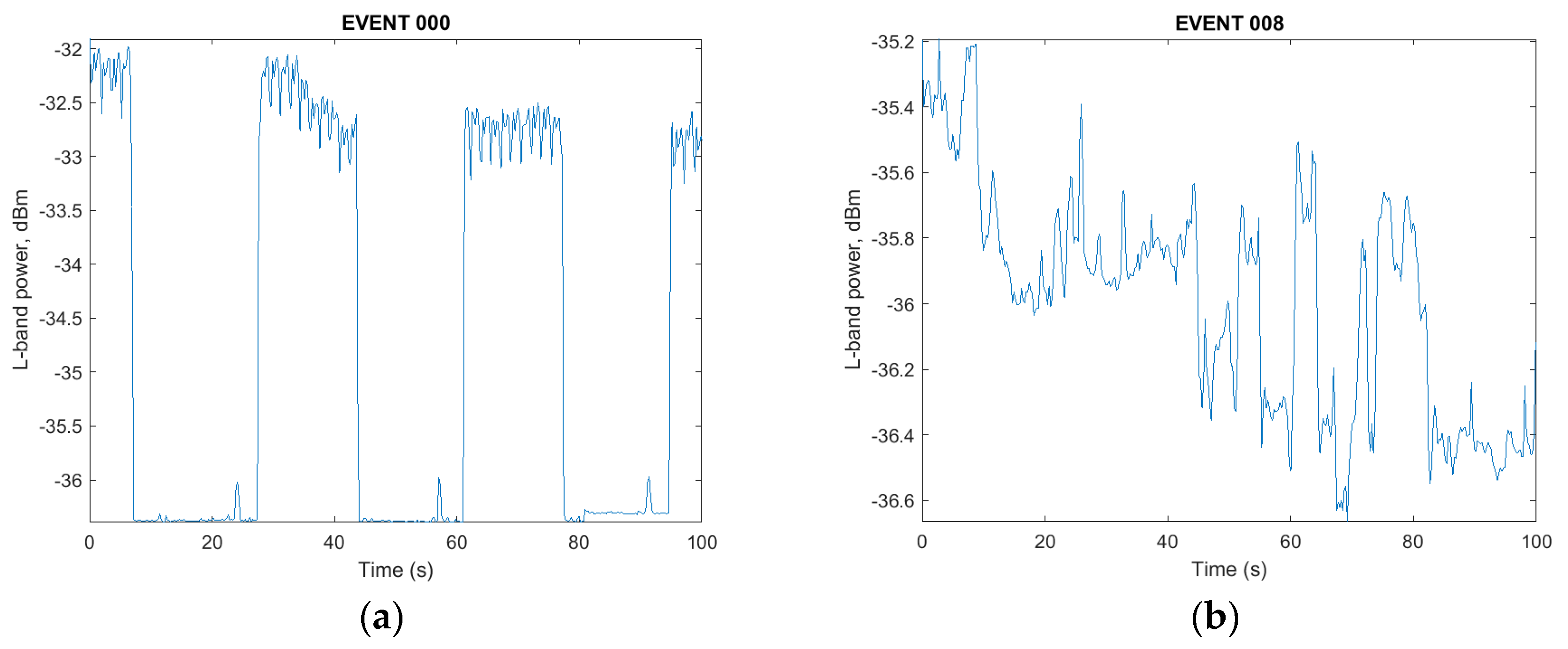
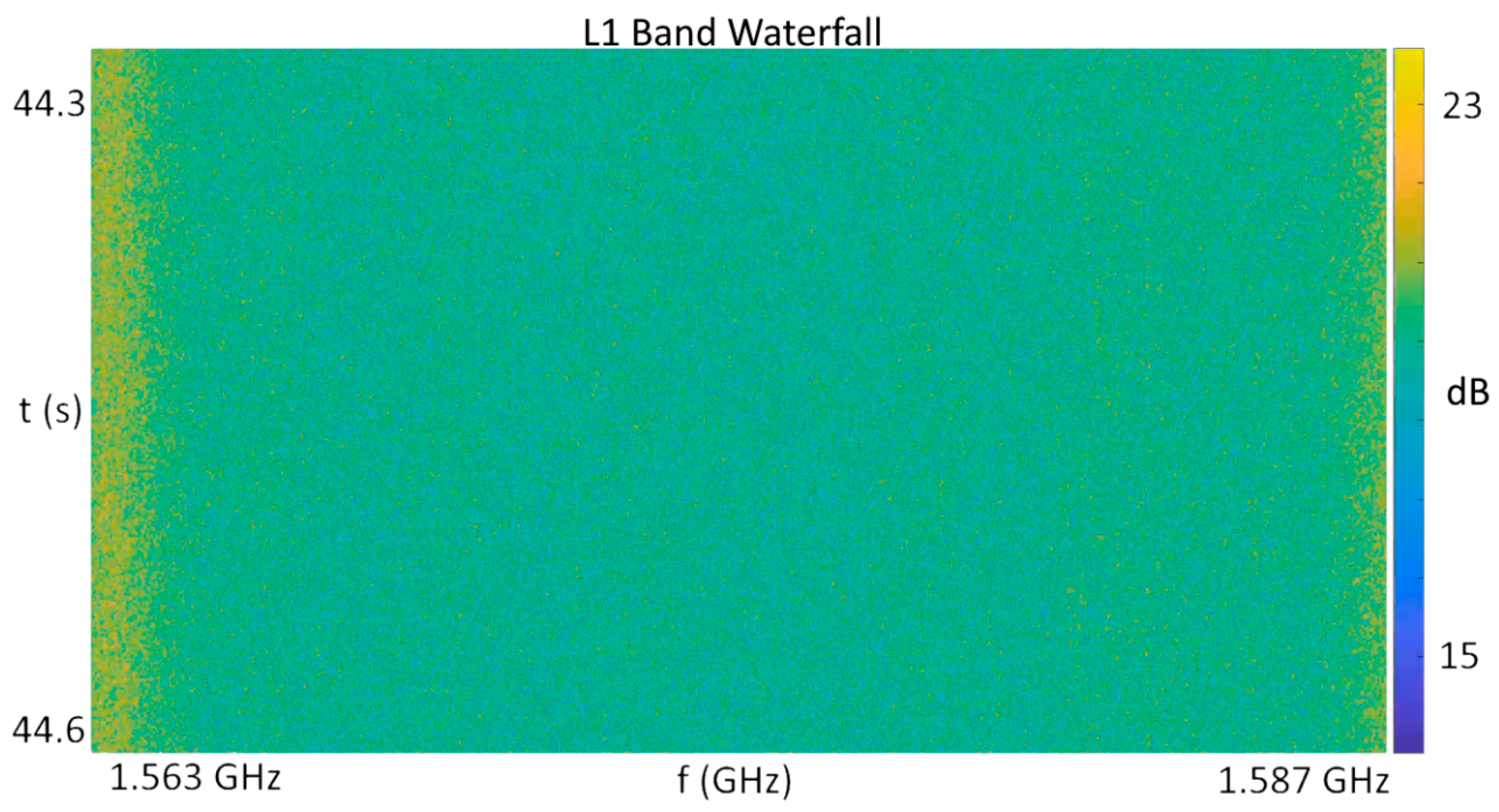
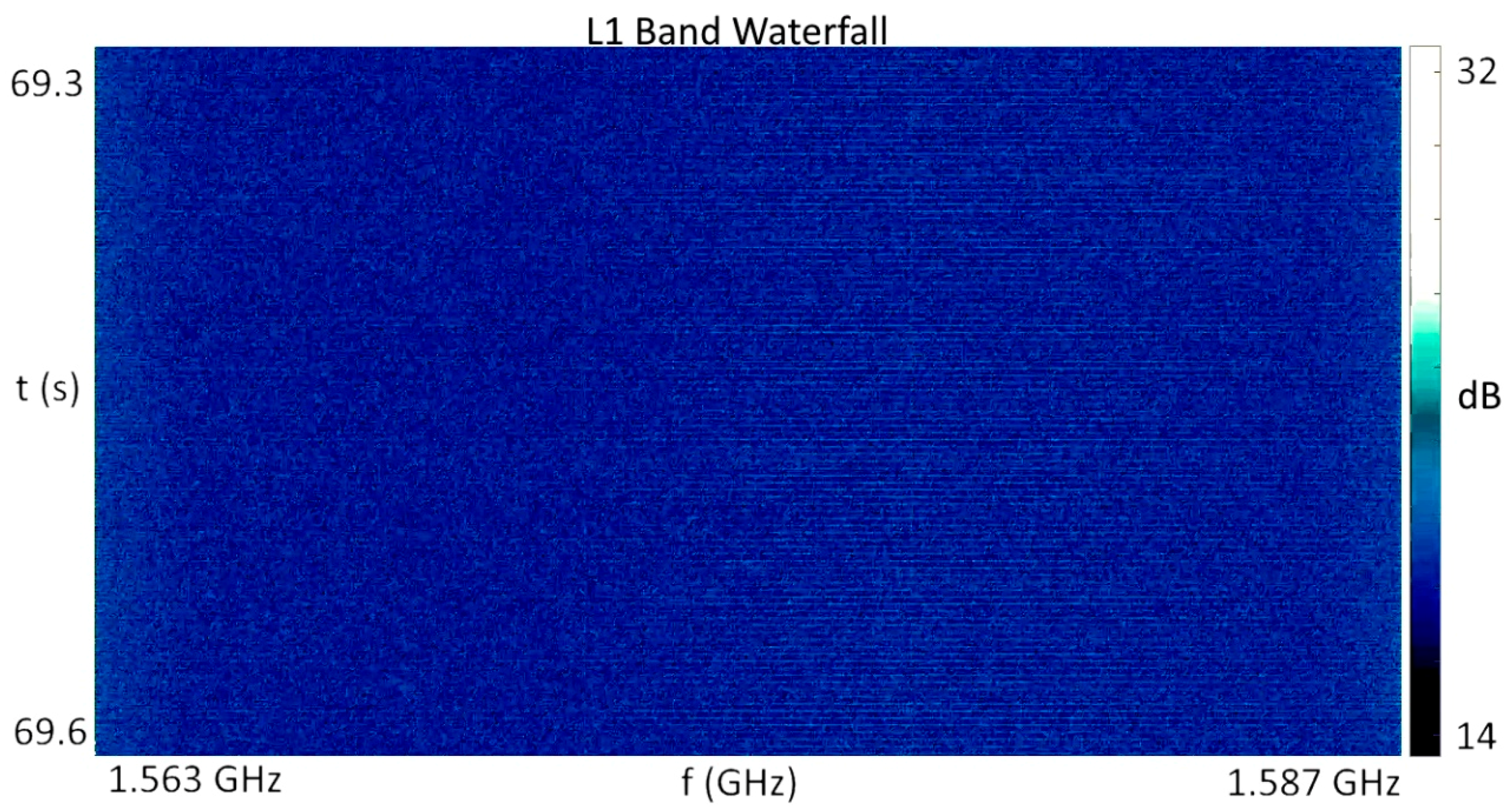
3.2. Example Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pattinson, M.; Dumbille, M.; Ying, Y.; Gabrielsson, B.; Waern, Å.; Hill, S.; Lee, S.; Zahidul, M.; Bhuiyan, H.; Kuusniemi, H.; Poloskey, M.; et al. Standardisation of GNSS Threat reporting and Receiver testing through International Knowledge Exchange, Experimentation and Exploitation [STRIKE3]. Eur. J. Navig. 2017, 15, 4–8. [Google Scholar]
- Pattinson, M.; Fryganiotis, D. Standardisation of GNSS Threat Reporting and Receiver Testing Through International Knowledge Exchange, Experimentation and Exploitation STRIKE3 D4.1: Draft Standards for Threat Monitoring and Reporting. Available online: www.strike3.eu (accessed on 12 June 2018).
- Ying, Y.; Whitworth, T.; Sheridan, K. Interference Detection with Software Defined Radio. Satell. Telecommun. (ESTEL) 2012, 1, 1–6. [Google Scholar] [CrossRef]
- Isoz, O. Interference Detection and Localization in the GPS L1 Frequency Band. Licentiate Thesis, Luleå University of Technology, Luleå, Sweeden, 2012. [Google Scholar]
- Borowski, H.; Isoz, O.; Eklöf, F.M.; Lo, S.; Akos, D. Detecting False Signals with Automatic Gain Control. Available online: gpsworld.com/detecting-false-signals-automatic-gain-control-12804/ (accessed on 2 June 2018).
- PXI Systems—National Instruments. Available online: http://www.ni.com/en-no/shop/pxi.html (accessed on 1 July 2018).
- Amungo Navigation | Nut4nt with Nt1065. Available online: https://www.amungo-navigation.com/nut4nt (accessed on 1 July 2018).
- NTLab NT1065 “Nomada” 4-Channel GPS/GLONASS/Galileo/Beidou/IRNSS/QZSS L1/L2/L3/L5 Band RF Front End. Available online: http://ntlab.com/IP/NT1065/NT1065_LE_DS_v2.04.pdf (accessed on 1 July 2018).
- SdrNav40—OneTalent Gnss. Available online: http://www.onetalent-gnss.com/ideas/software-defined-radio/sdrnav40 (accessed on 1 July 2018).
- SX3 GNSS Software Receiver. Available online: https://www.ifen.com/products/sx3-gnss-software-receiver/ (accessed on 1 July 2018).
- Curran, J.T.; Morrison, A.; Sokolova, N. Dual-Frequency Positioning via Time-Multiplexing of Single-Frequency Resources. In Proceedings of the ION GNSS+ 2017, Portland, OR, USA, 25–29 September 2017. [Google Scholar]
- MACOM—Product Detail—MAAL-011078. Available online: https://www.macom.com/products/product-detail/MAAL-011078 (accessed on 1 July 2018).
- Walsin Technology Corporation, ASC_RBBPF3225180C67B1U_V01 Approval sheet RBBPF Series, August 2015 Version. Available online: https://media.digikey.com/pdf/Data%20Sheets/Walsin%20Technology%20PDFs/RBBPF3225180C67B1U.pdf (accessed on 1 July 2018).
- Anaren Model PD0922J5050S2HF Rev. B Data Sheet. Available online: https://cdn.anaren.com/product-documents/Xinger/PowerDividers/PD0922J5050S2HF/PD0922J5050S2HF_DataSheet(Rev_B).pdf (accessed on 1 July 2018).
- NovAtel VEXXISTM Antennas GNSS-850. Available online: https://www.novatel.com/assets/Documents/Papers/GNSS-850-Product-Sheet.pdf (accessed on 1 July 2018).
- Linear Technology LT5538 40MHz to 3.8GHz RF Power Detector with 75dB Dynamic Range. Available online: http://www.analog.com/media/en/technical-documentation/data-sheets/5538f.pdf (accessed on 1 July 2018).
- MAXIM MAX2120 Complete, Direct-Conversion Tuner for DVB-S and Free-to-Air Applications Datasheet. Available online: https://datasheets.maximintegrated.com/en/ds/MAX2120.pdf (accessed on 1 July 2018).
- XILINX Spartan-3A FPGA Family: Data Sheet DS529 August 19, 2010. Available online: https://www.xilinx.com/support/documentation/data_sheets/ds529.pdf (accessed on 1 July 2018).
- Microchip PIC32MZ Embedded Connectivity with Floating Point Unit (EF) Family Datasheet. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/60001320E.pdf (accessed on 1 July 2018).
- GNSS Metadata Standard Project Page, Updated June 2018. Available online: http://www.github.com/IonMetadataWorkingGroup/GNSS-Metadata-Standard (accessed on 12 June 2018).
- Fernandez-Hernandez, I. Resilient Positioning, Navigation, and Timing. In Proceedings of the 2017 International Technical Symposium on Navigation and Timing (ITSNT), Toulouse, France, 15–17 November 2017. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Minimum | Utilized | Maximum |
|---|---|---|---|
| Channels | 2 | 2 | 4 |
| Mixer Frequency (MHz) | 925 | 1176,1575 | 2175 |
| Sampling rate (MHz) | 2 | 24 | 54 1 |
| Two sided filter bandwidth (MHz) | 8 | 23.66 | 80 |
| Antenna power | Off | 5 V @ 70 mA | 24 V 2 |
| Sampling Format and bits | 1I,1Q | 1I,1Q | 1I,1Q |
| Secondary sensor payload capacity (kB/second) | 3.5 | 42 | 93 |
| Tuning resolution (MHz) | 1 | 1 | 2 3 |
| Power Consumption (Watt) | 1.8 | 2.0 | 2.2 |
| Oscillator pulling range (ppm) | −5 | +0.1 | +5 |
| Ceramic Filter pass-band (MHz) | 1125–1675 | ||
| External filter band-stop (MHz) 4 | 1220–1525 | ||
| External filter lowpass (MHz) 4 | 0–1610 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morrison, A.; Sokolova, N.; Curran, J. Design of a Multiband Global Navigation Satellite System Radio Frequency Interference Monitoring Front-End with Synchronized Secondary Sensors. Sensors 2018, 18, 2594. https://doi.org/10.3390/s18082594
Morrison A, Sokolova N, Curran J. Design of a Multiband Global Navigation Satellite System Radio Frequency Interference Monitoring Front-End with Synchronized Secondary Sensors. Sensors. 2018; 18(8):2594. https://doi.org/10.3390/s18082594
Chicago/Turabian StyleMorrison, Aiden, Nadezda Sokolova, and James Curran. 2018. "Design of a Multiband Global Navigation Satellite System Radio Frequency Interference Monitoring Front-End with Synchronized Secondary Sensors" Sensors 18, no. 8: 2594. https://doi.org/10.3390/s18082594
APA StyleMorrison, A., Sokolova, N., & Curran, J. (2018). Design of a Multiband Global Navigation Satellite System Radio Frequency Interference Monitoring Front-End with Synchronized Secondary Sensors. Sensors, 18(8), 2594. https://doi.org/10.3390/s18082594