Use of Magnetic Field for Mitigating Gyroscope Errors for Indoor Pedestrian Positioning †


Abstract
:1. Introduction
2. Magnetometer Calibration
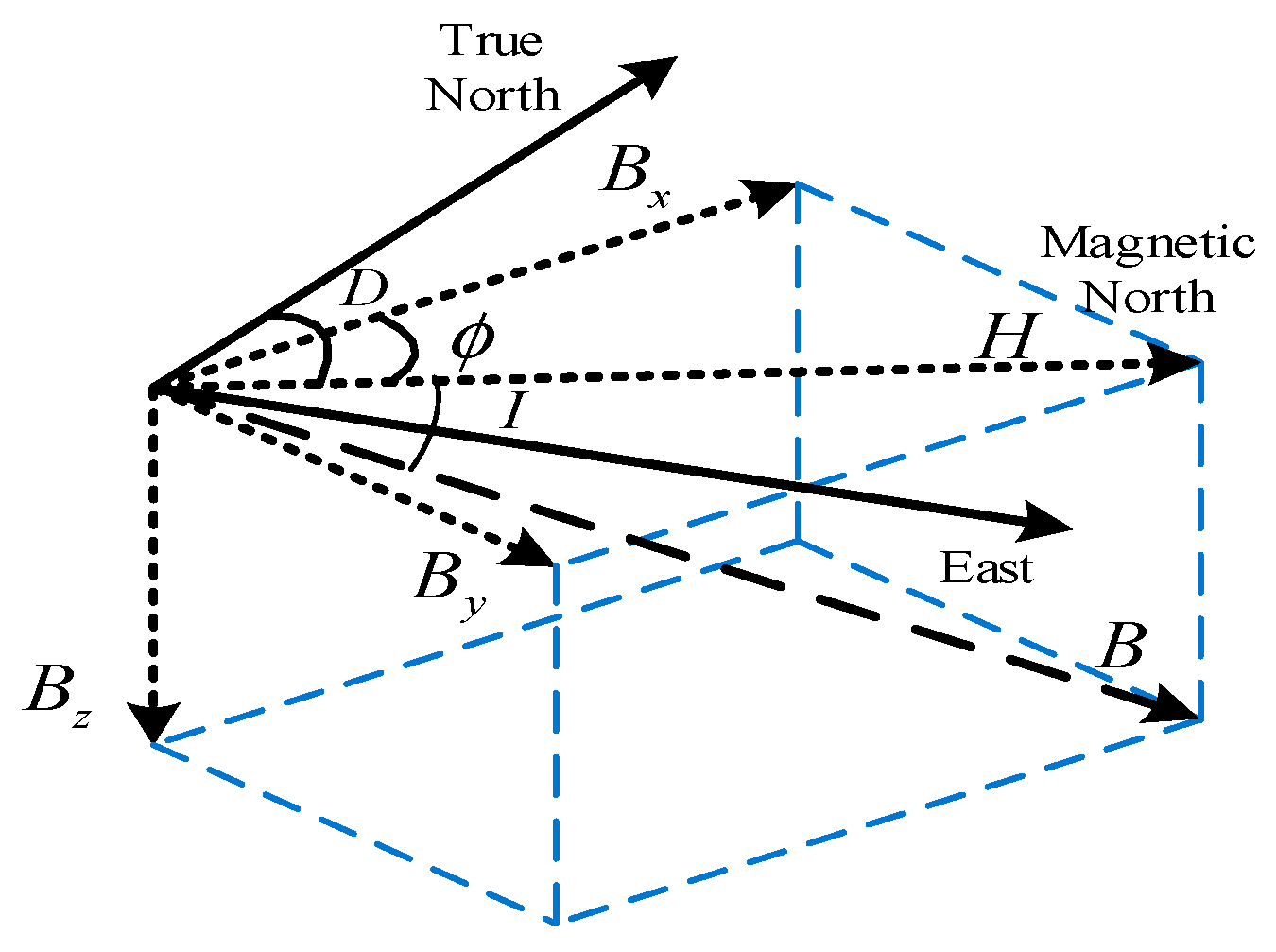
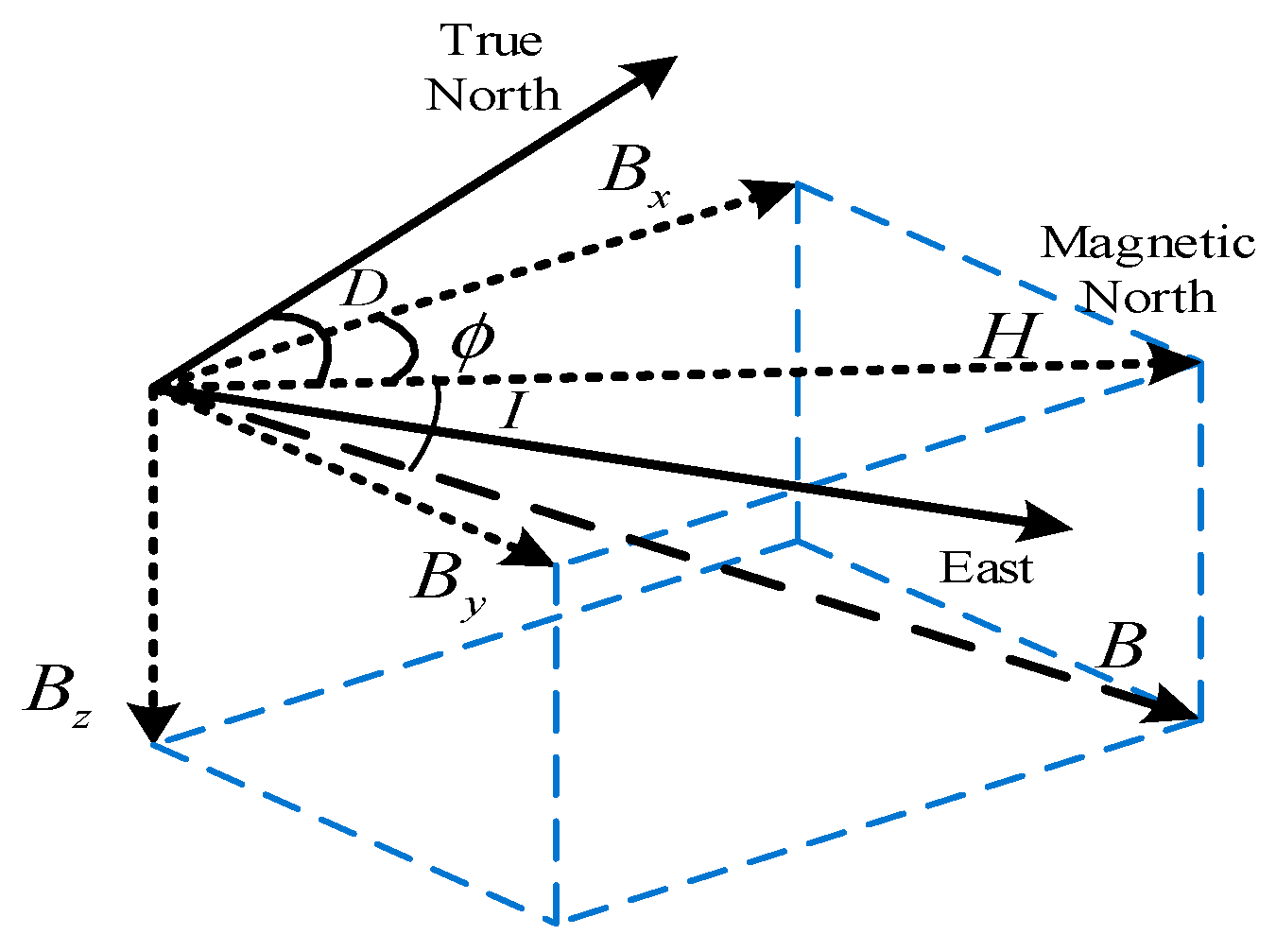
2.1. Heading and Inclination Angle Estimation Using Magnetic Field
2.2. Magnetometer Error Source
2.3. Magnetometer Calibration Procedure
2.3.1. Hard Iron Distortion Calibration Procedure
- (1)
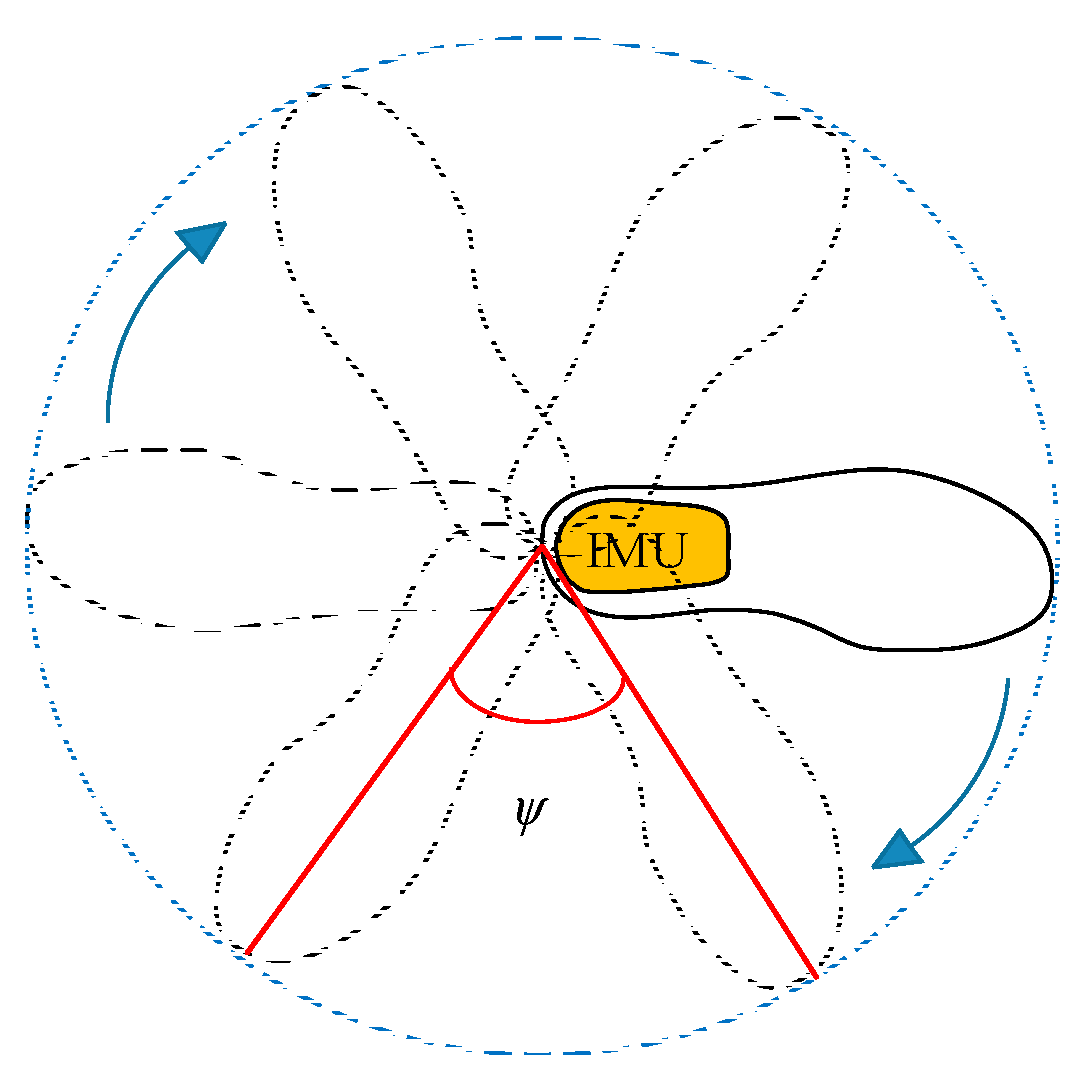
- Let the IMU be installed in the heel of the pedestrian’s shoe, then the pedestrian walks around a loop as shown in Figure 2. Note that the rotation angle should be as small as possible to store relatively complete measurements of the Earth’s magnetic field. Here, we choose a reference value of from 15° to 35°.
- (2)
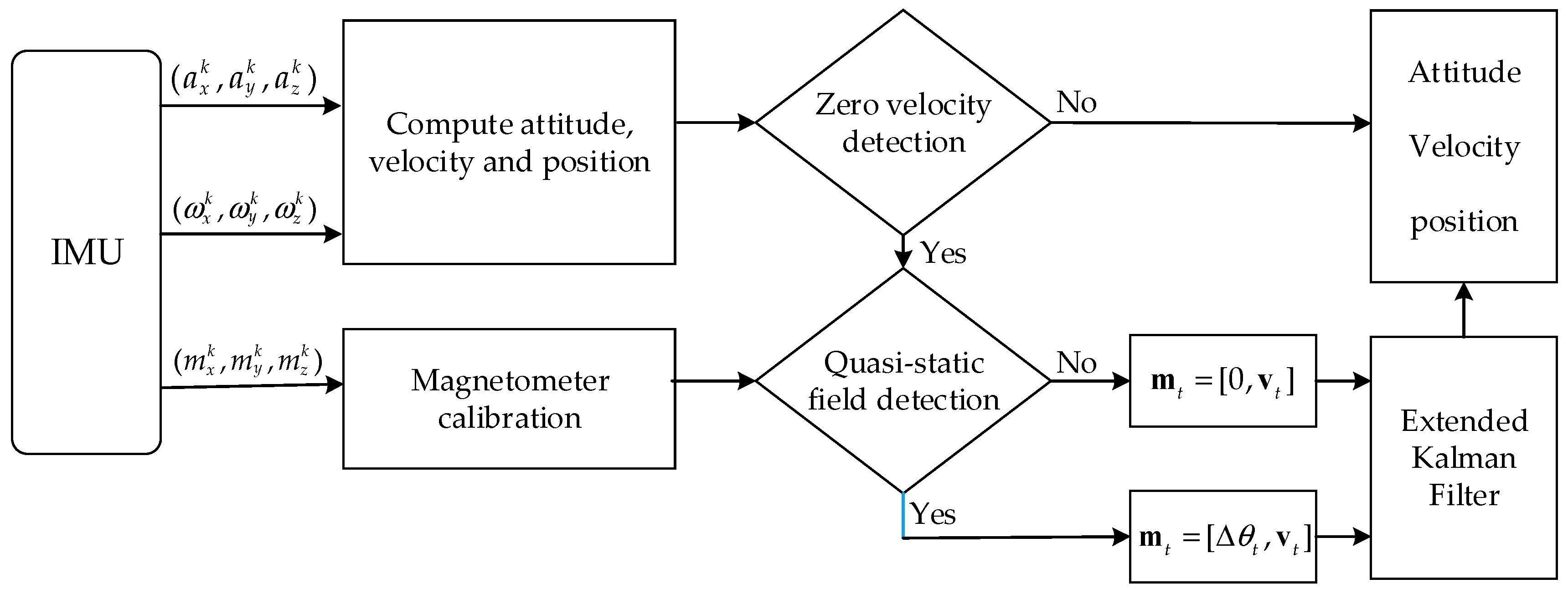
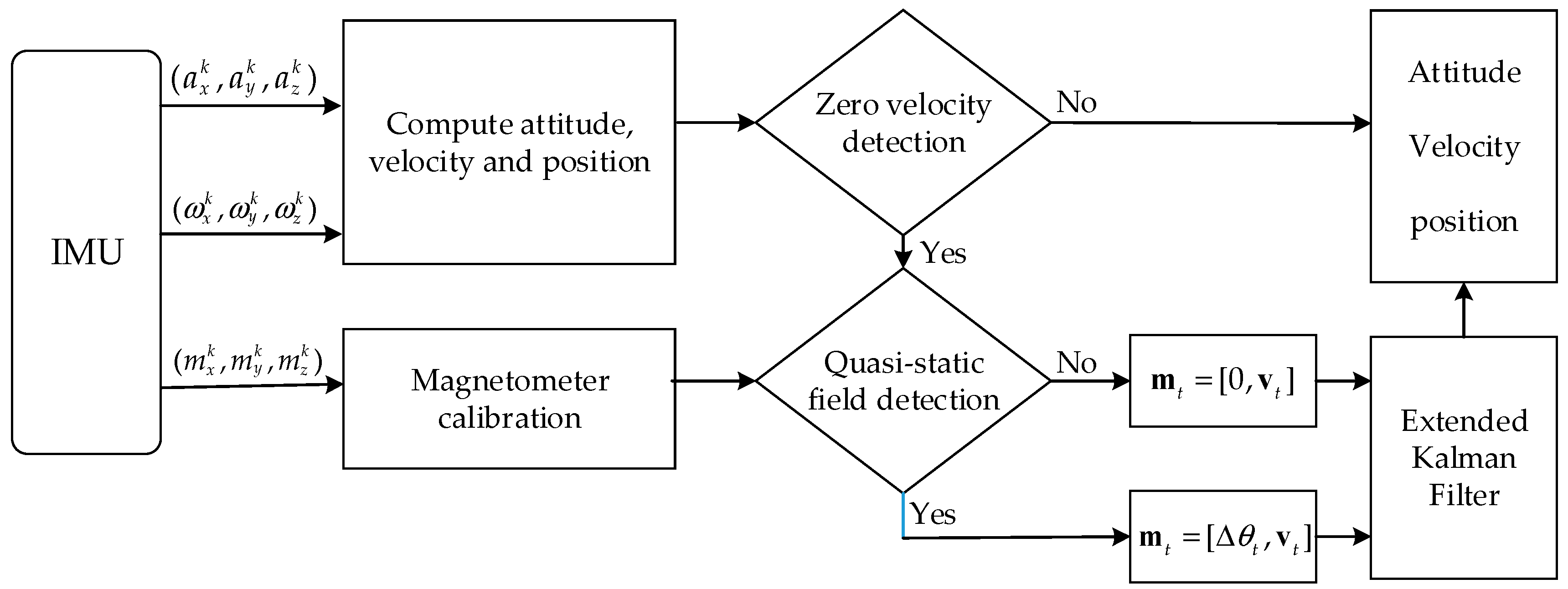
- By using the stored data, the stance phase can be identified according to the Zero-Velocity detection algorithm in Reference [31].
- (3)
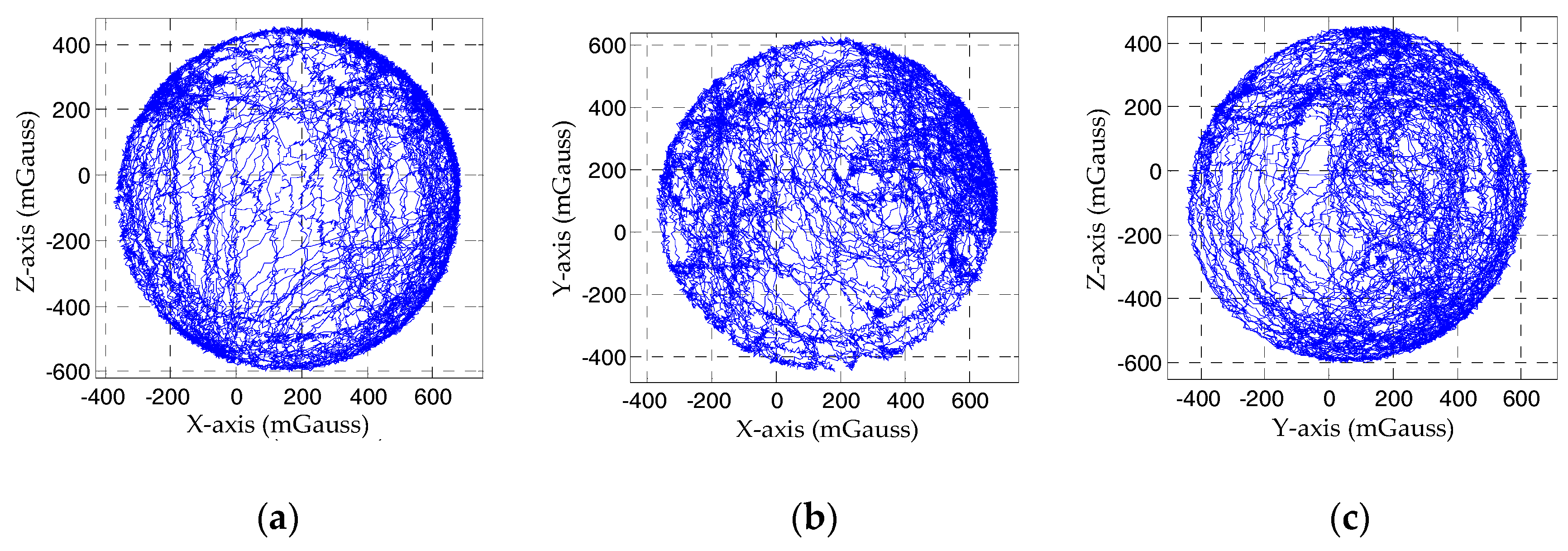
- Transform the magnetometer’s measurement from the sensor body coordinate frame to the navigation frame according to Equation (4). Then the average maximum and minimum values for each of the axes can be calculated.
- (4)
- Let and denote the maximum and minimum values of and axe respectively. Then, determine offsets of each axes as follows:where and represent the offset of and axe respectively. Then these offsets are subtracted from the magnetometer’s data that have been transformed at step (3) to eliminate the hard iron distortion effects.
2.3.2. Soft Iron Distortion Calibration Procedure
- (1)
- Find major axe and minor axe of the ellipse by a loop calculation of stored magnetic field database :where , is the length of the major axe and is length of the minor axe. For both and , we can get corresponding coordinates from : and .
- (2)
- Determine inclination angle of the ellipse by:Then, the rotational matrix can be constructed to align the rotated ellipse with one of the coordinate system axes. The rotational matrix is given by:
- (3)
- Rotate the ellipse:where represents the set of coordinates after rotated. To scale the two-axis length of ellipse equal, the scale factor is required .
- (4)
- Scale axe (or axe) coordinate of the ellipse to make it circular:The coordinates set of the circle is rotated back to initial position using the rotational matrix and inclination angle:where represents the final result of the magnetometer calibration.
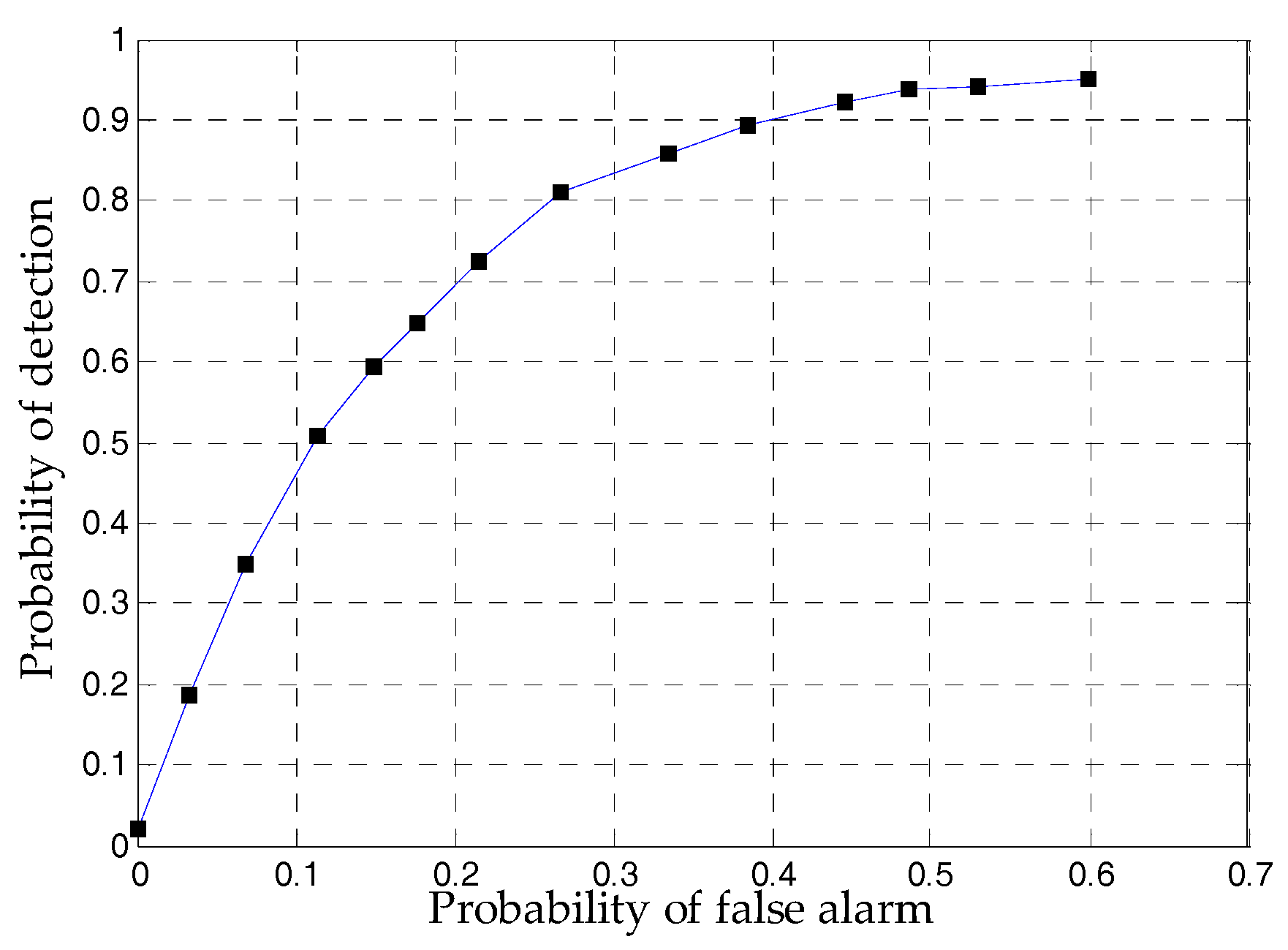
3. Quasi-Static Magnetic Field Detection
4. Heading Error Estimation
5. Results and Discussion
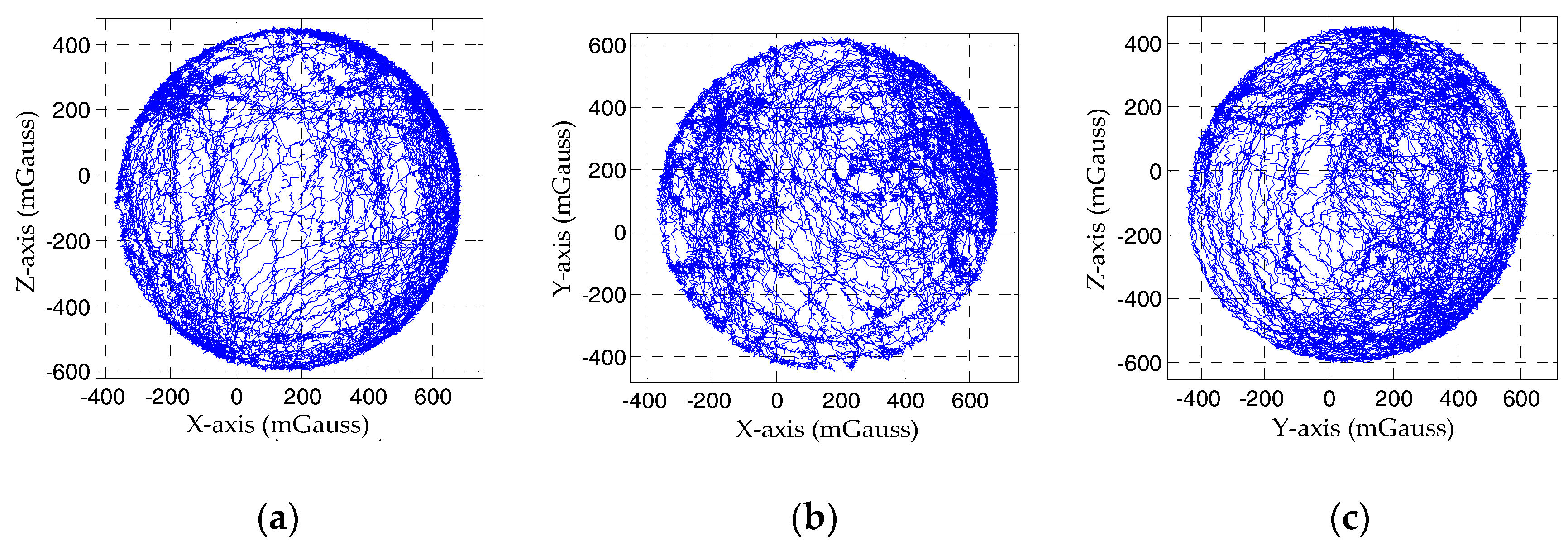
5.1. Magnetometer Calibration Experiments
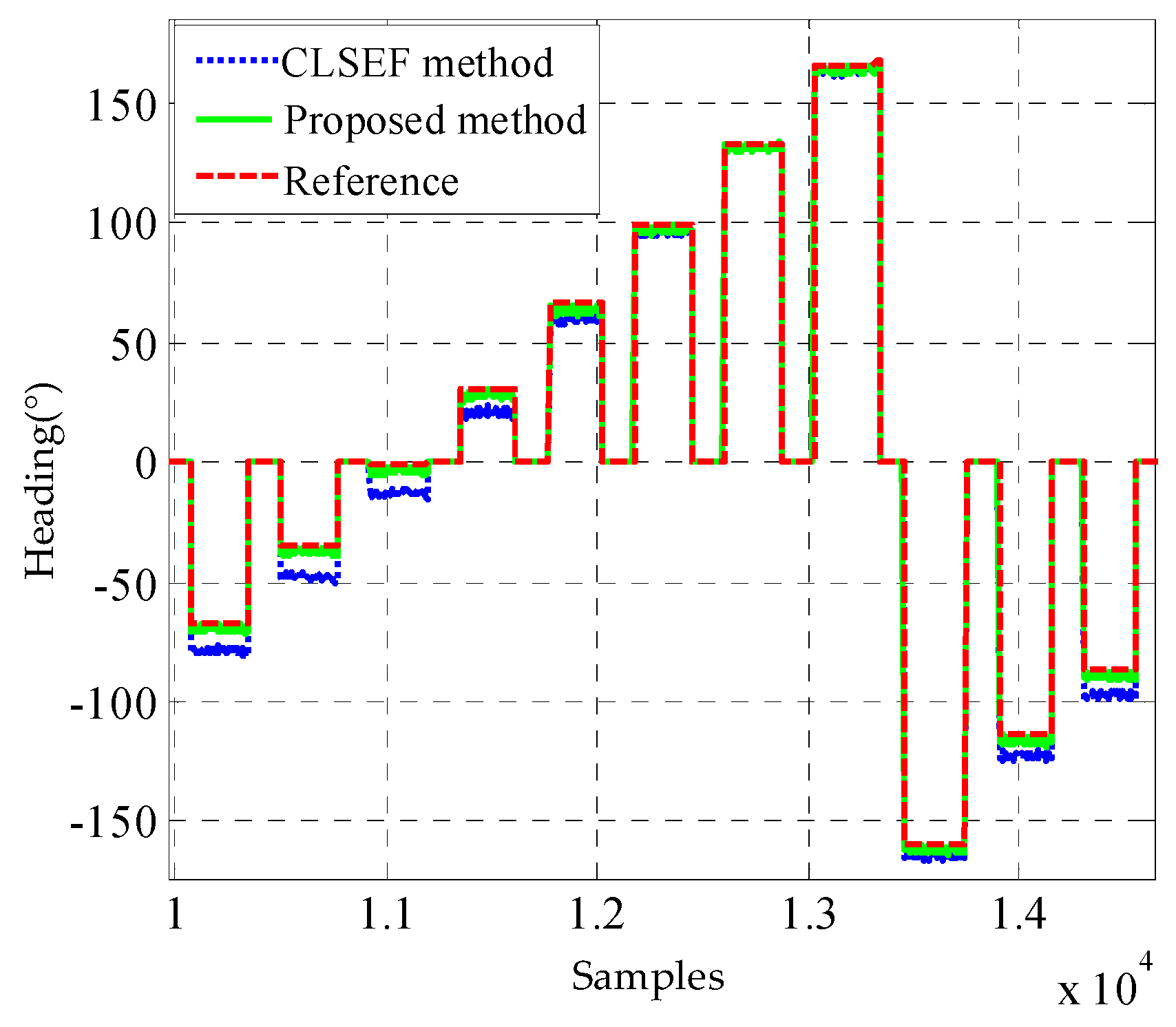
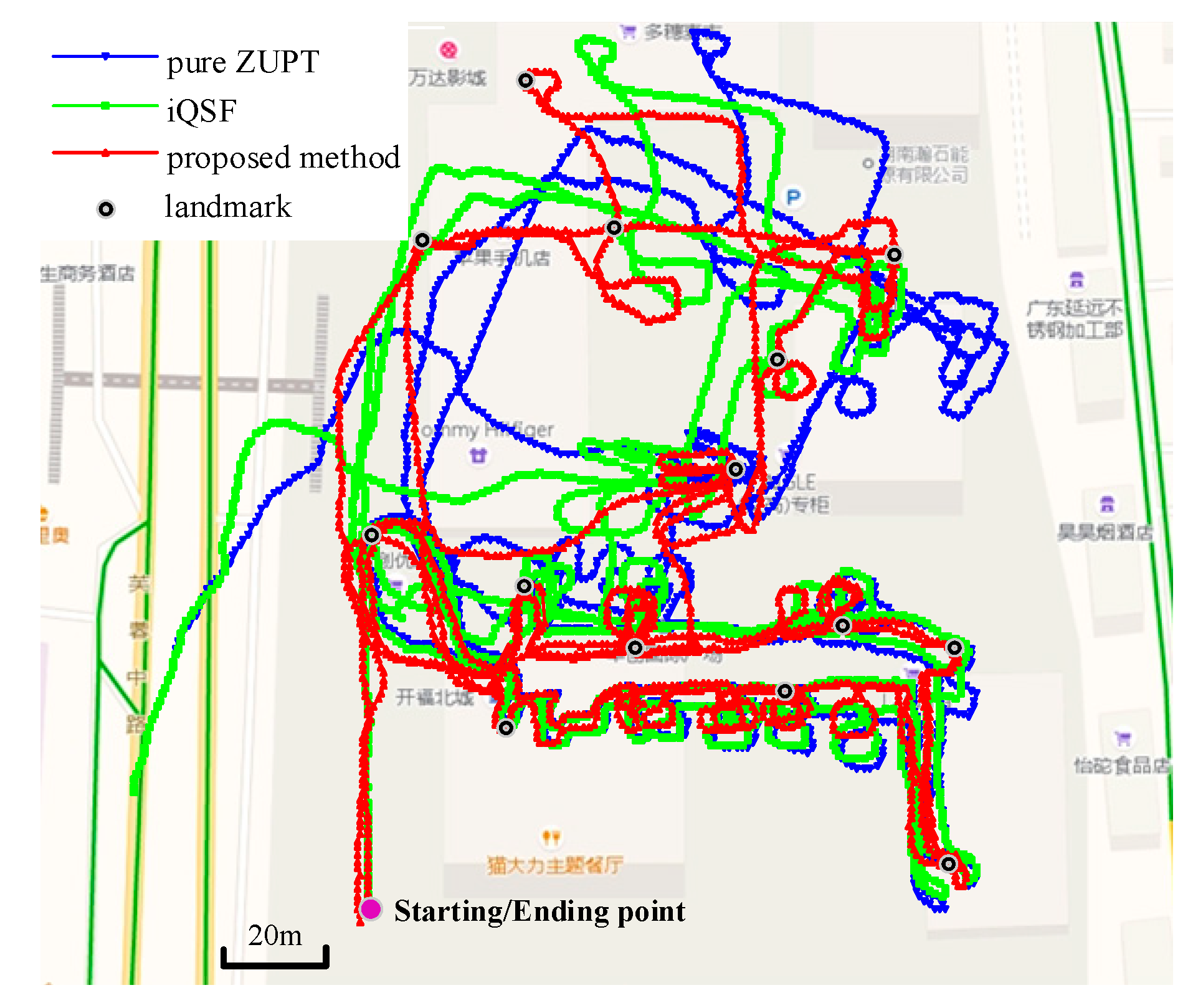
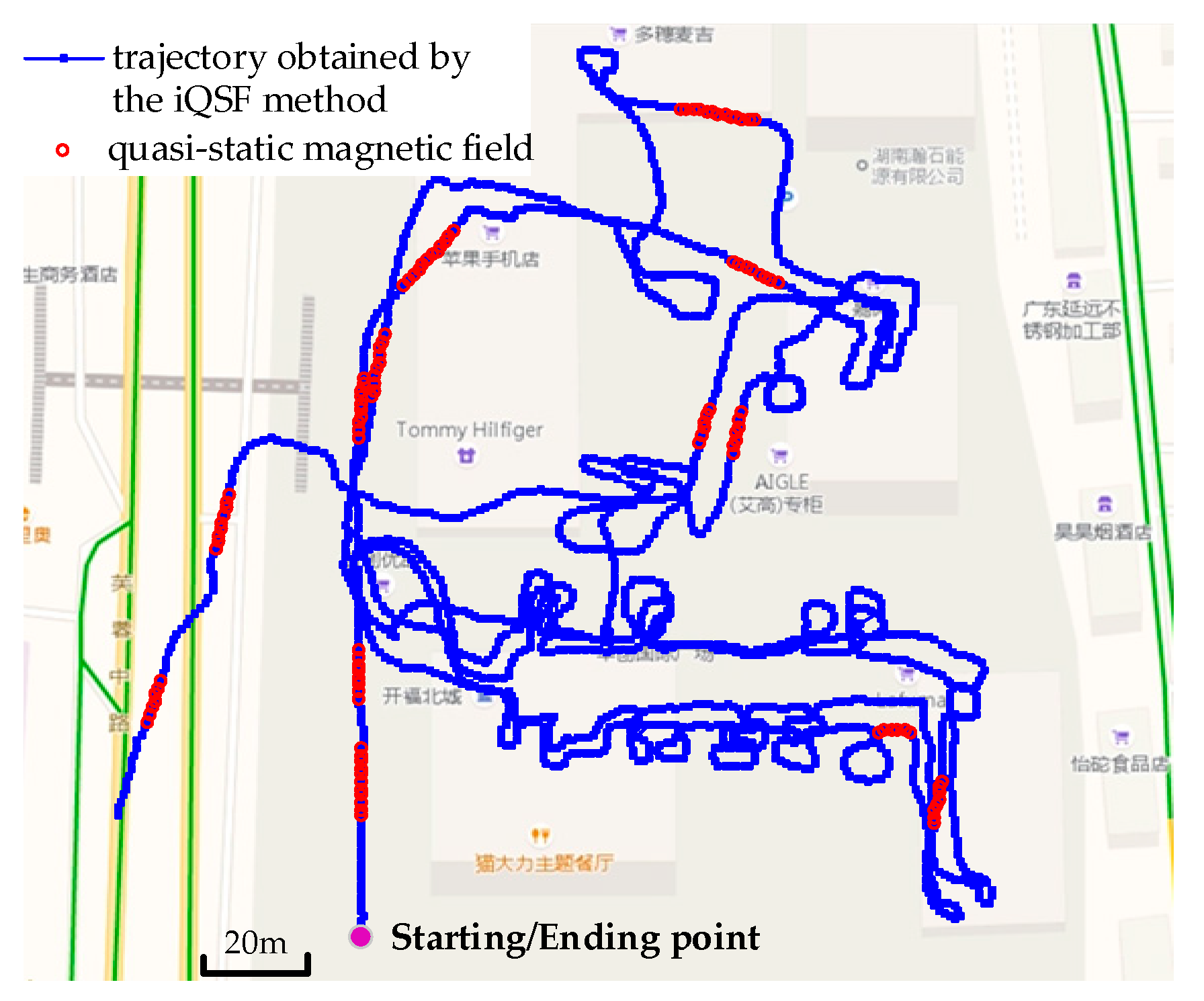
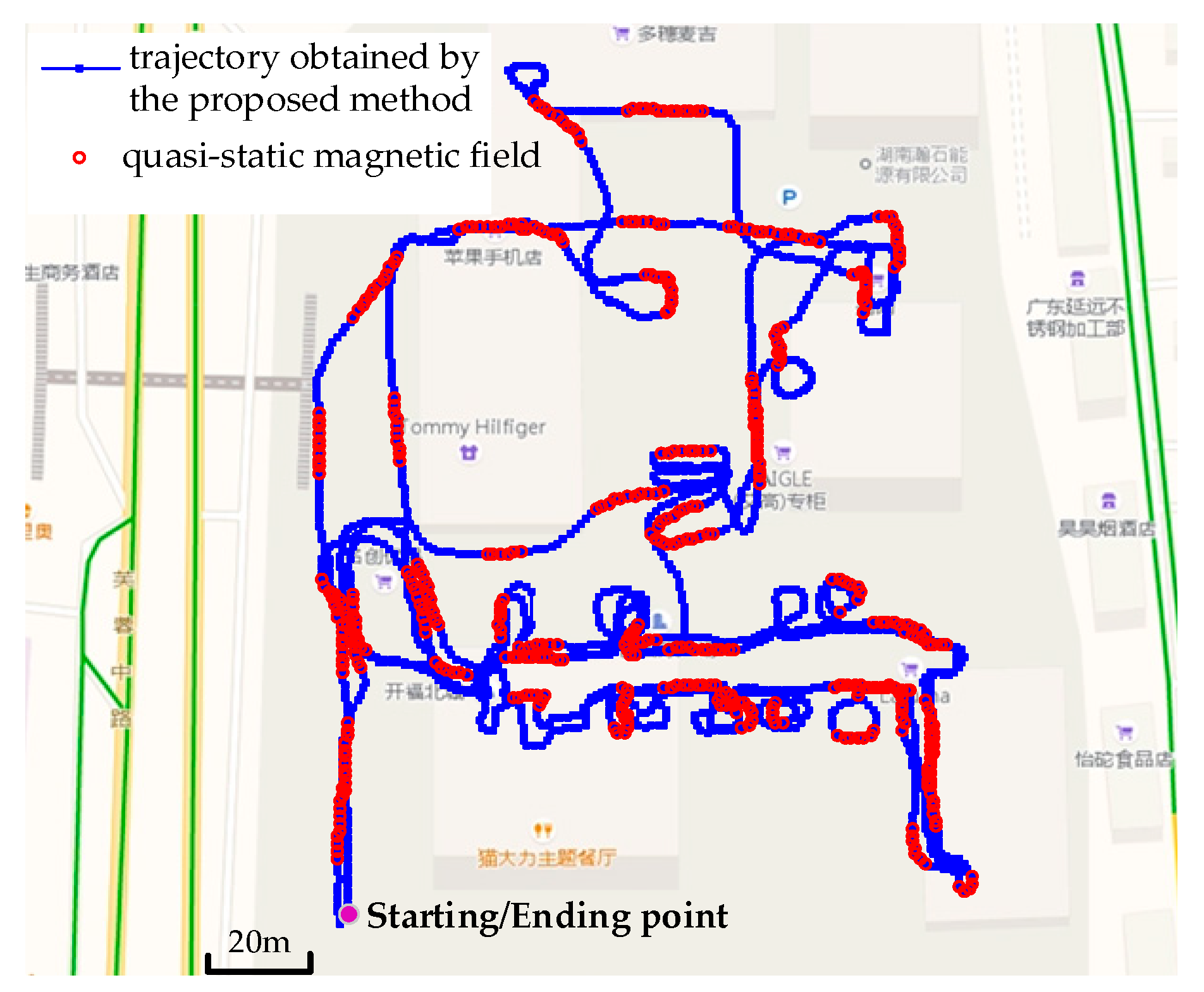
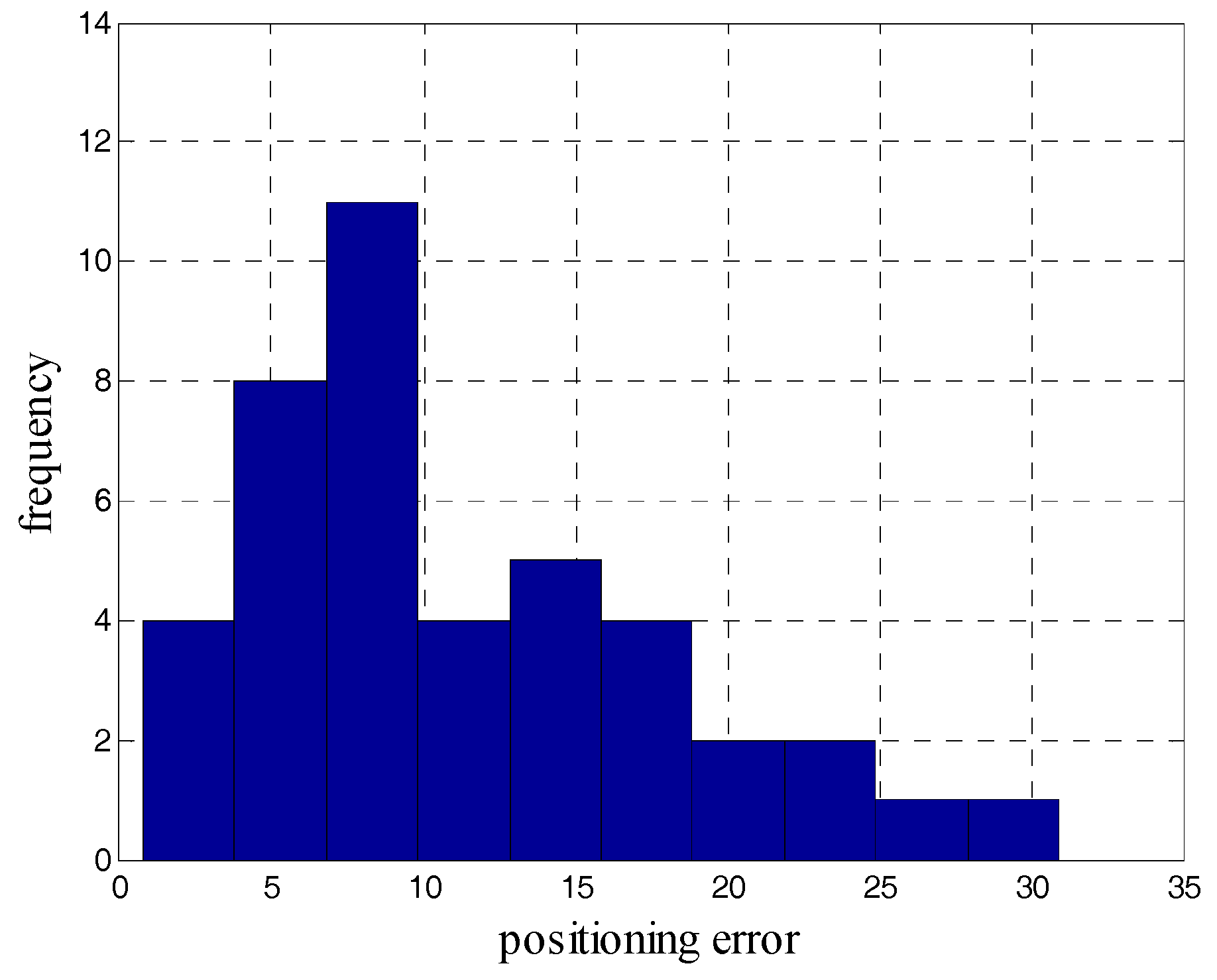
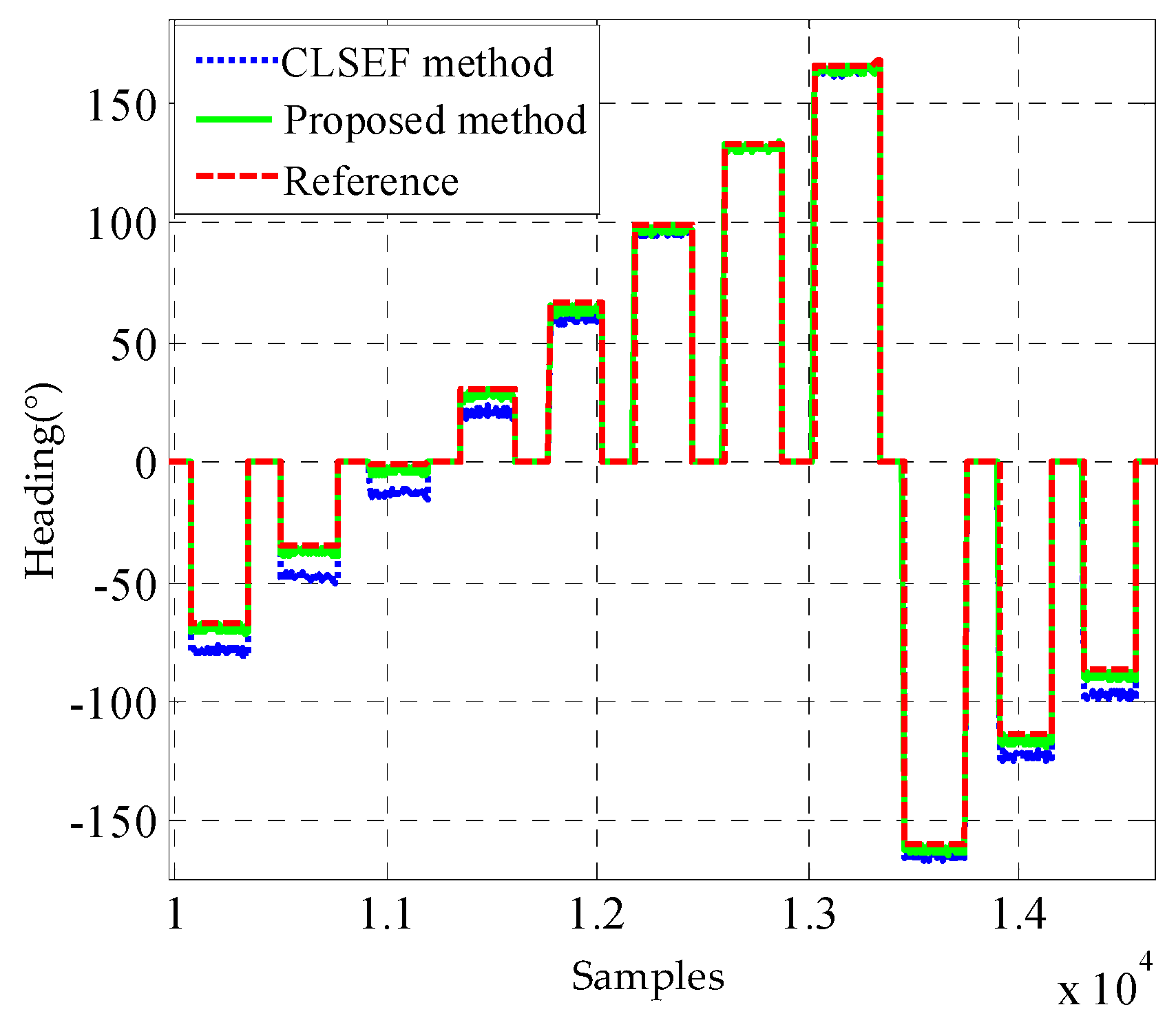
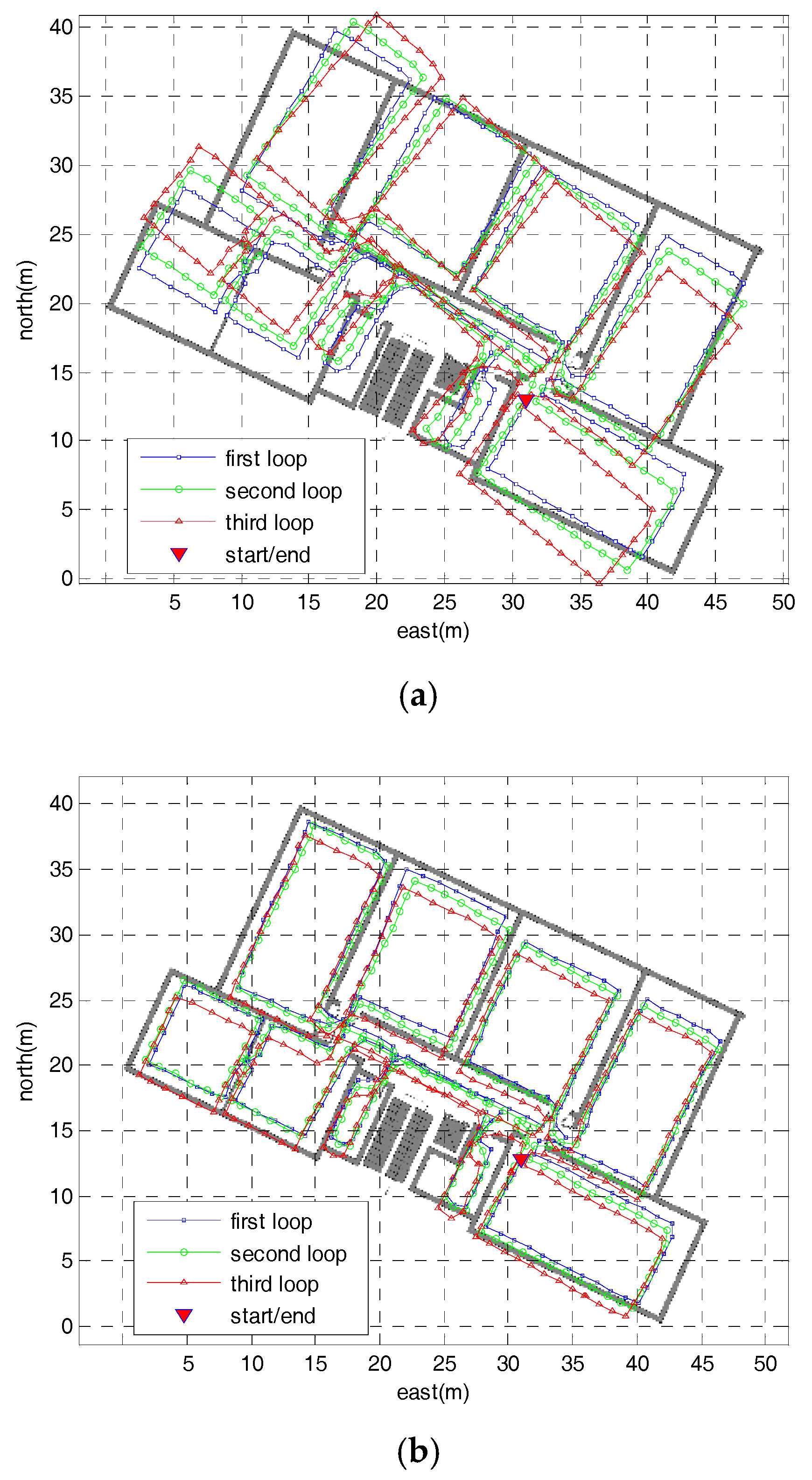
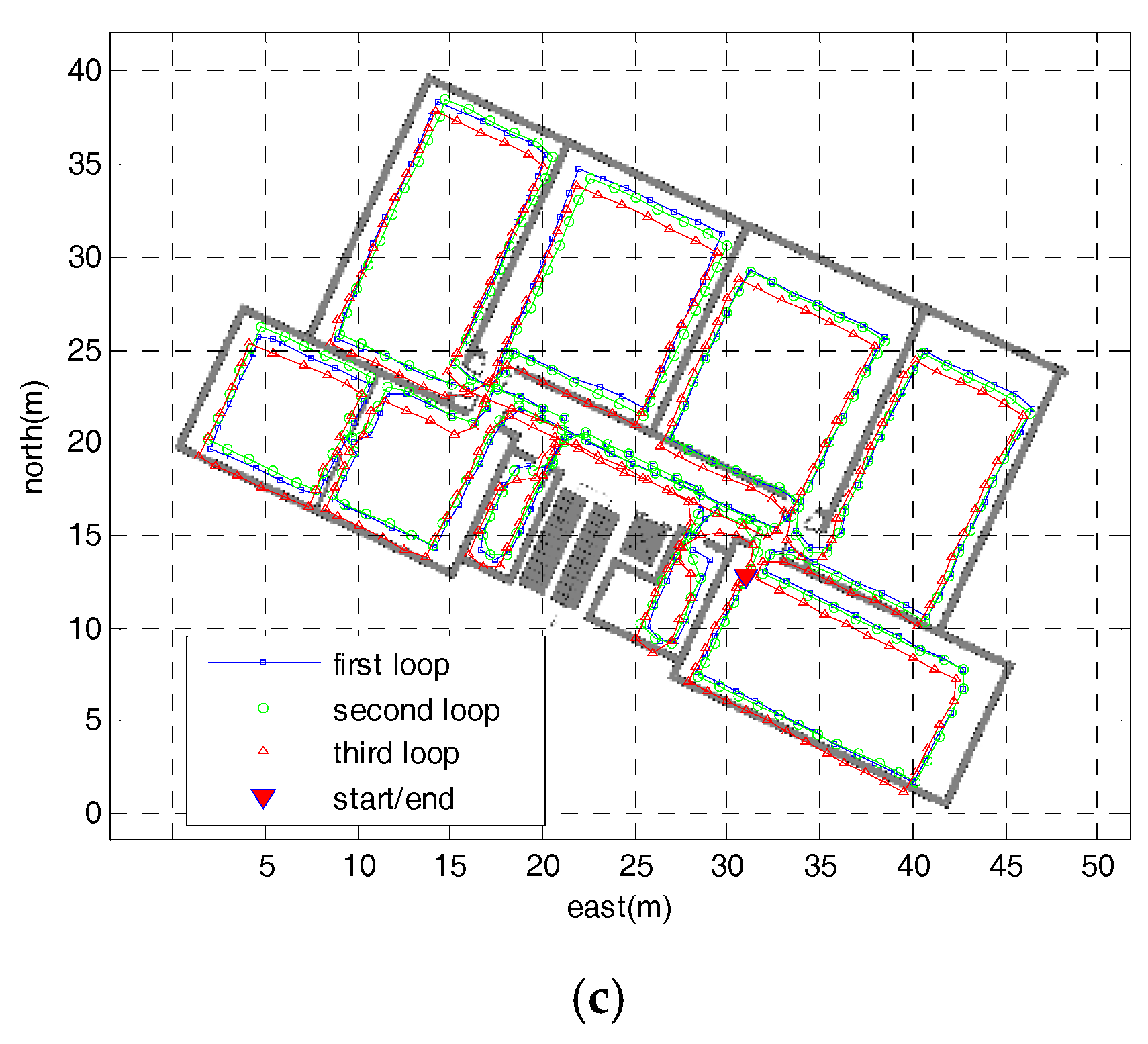
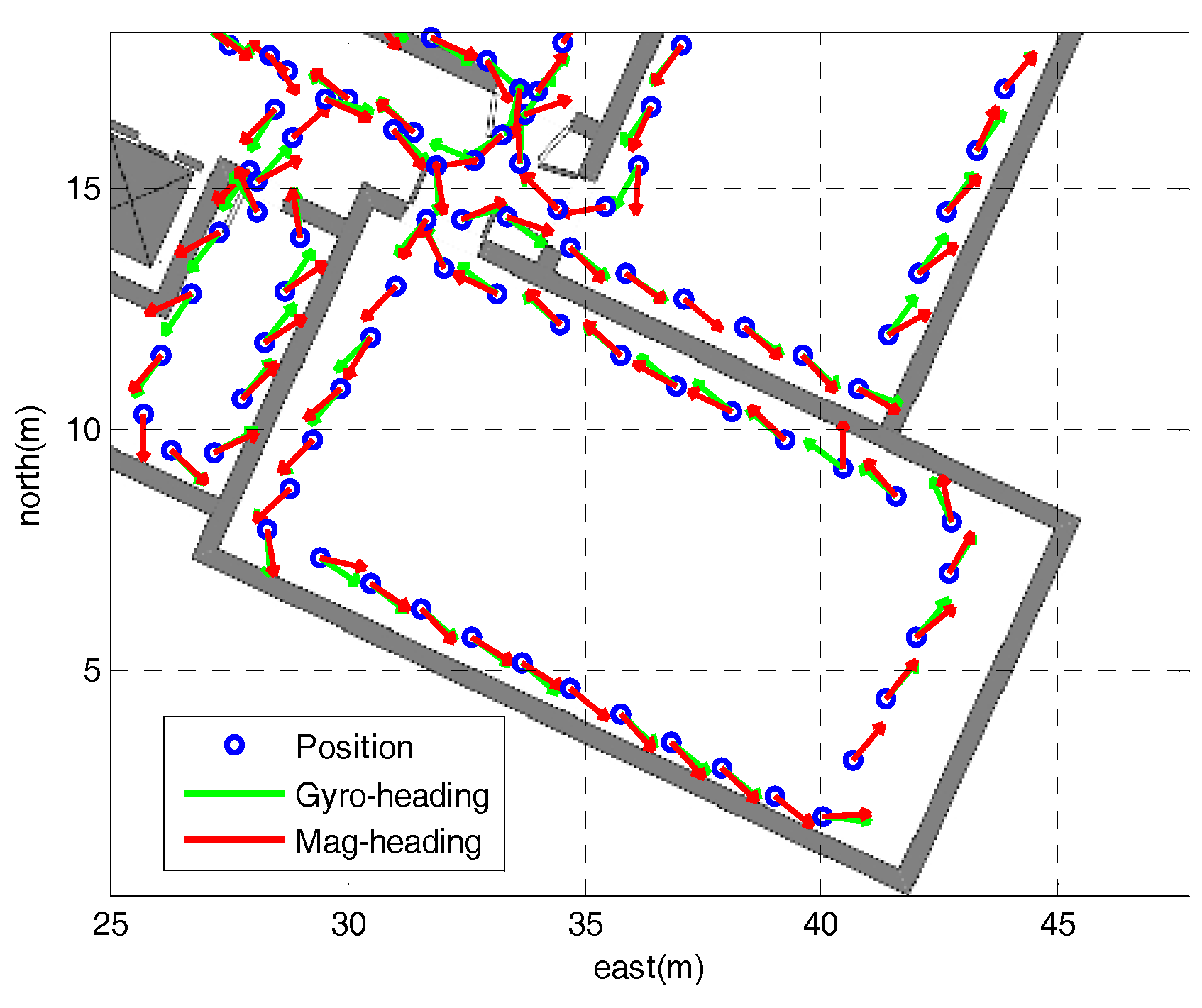
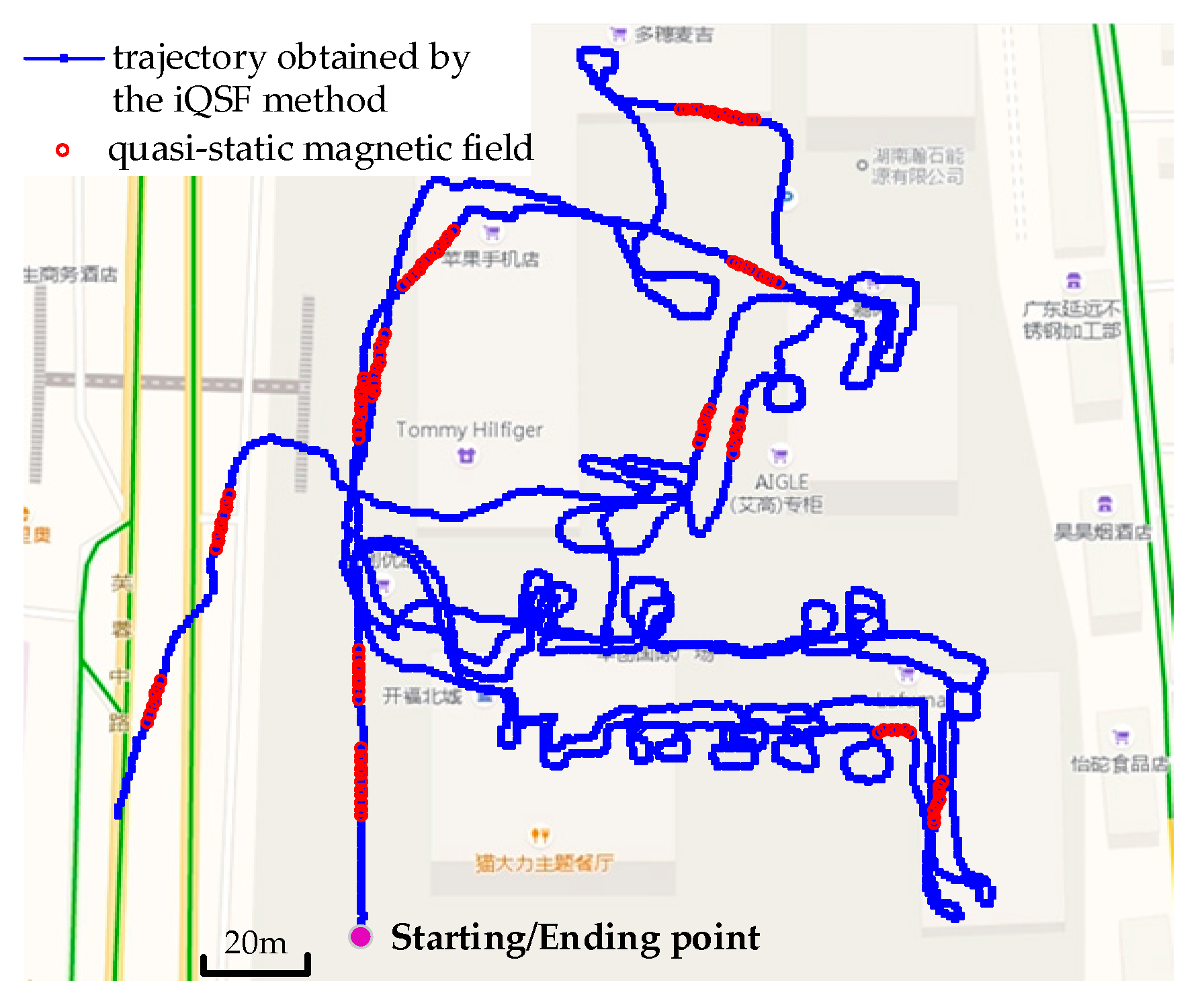
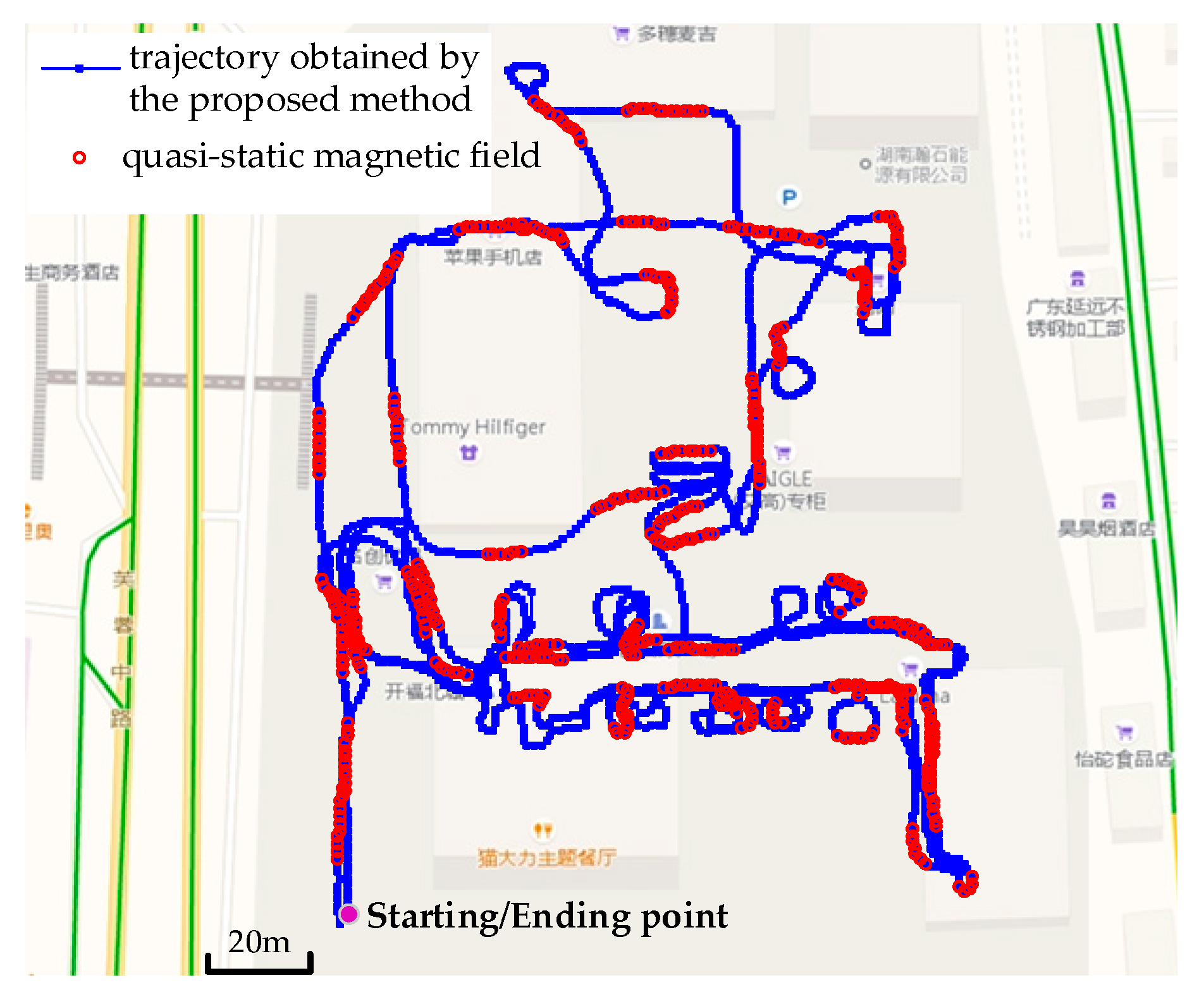
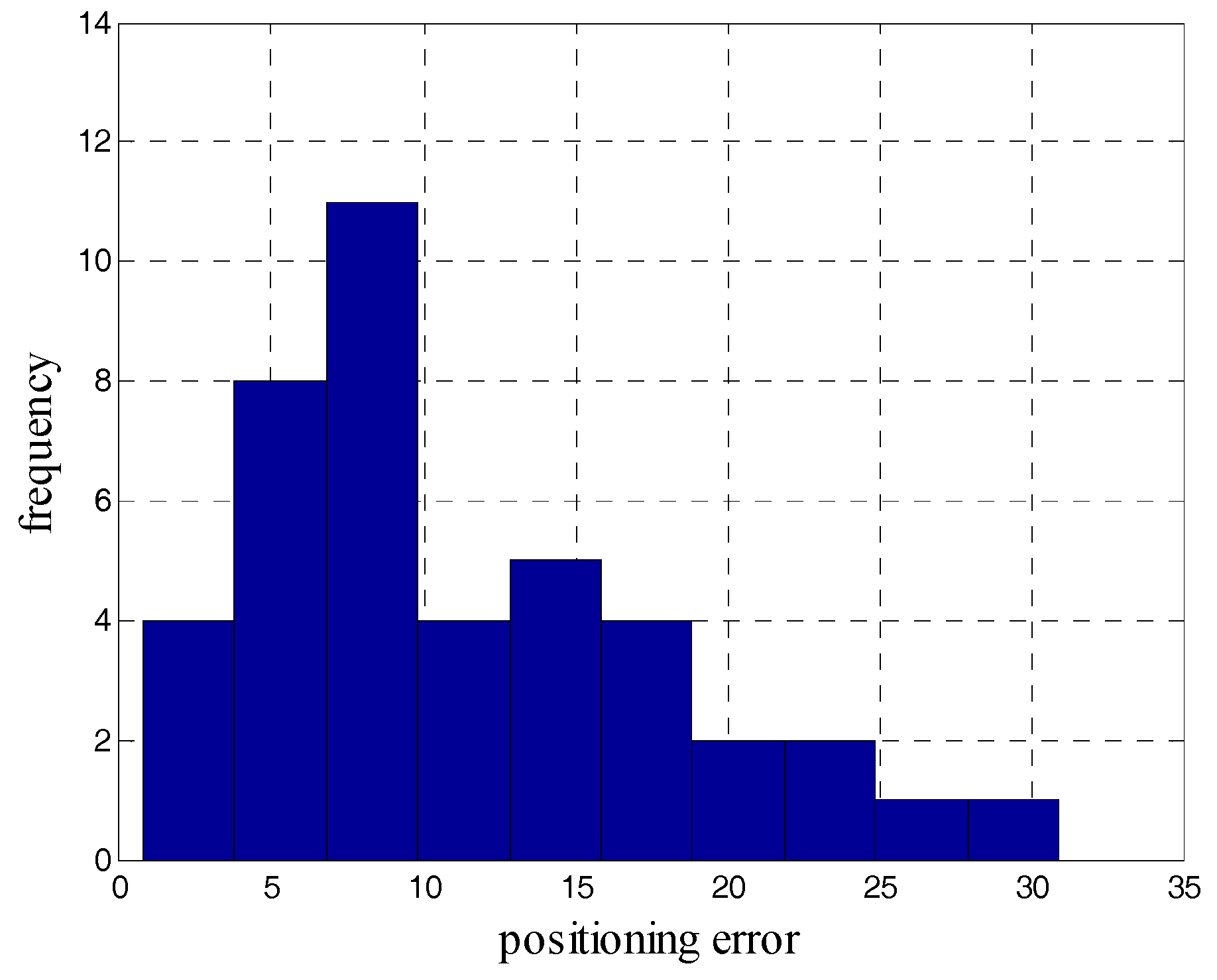
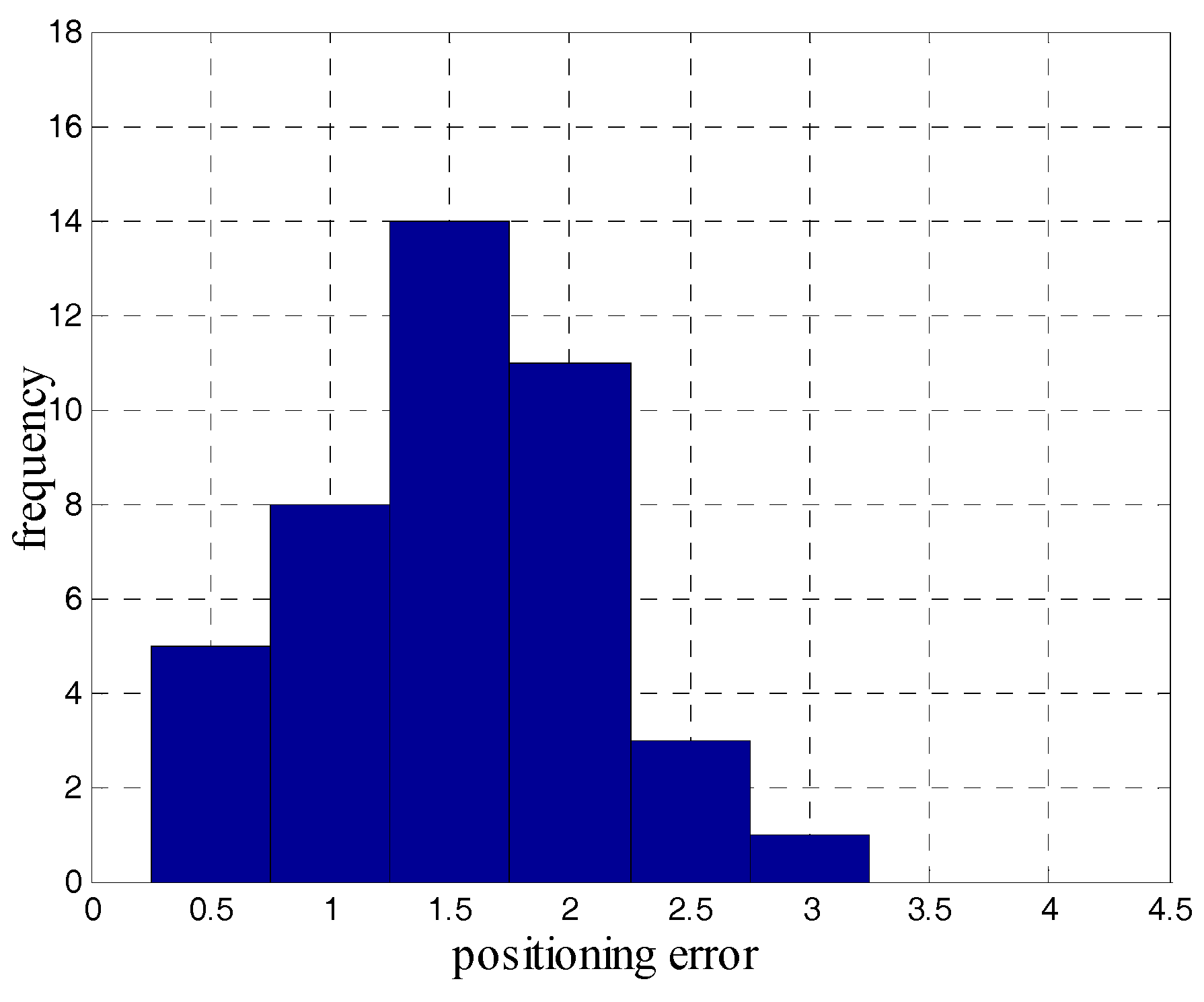
5.2. Heading Error Correction Experiments
6. Conclusion
Author Contributions
Conflicts of Interest
References
- Lindo, A.; García, E.; Ureña, J.; Pérez, M.D.C.; Hernández, A. Multiband waveform design for an ultrasonic indoor positioning system. IEEE Sens. J. 2015, 15, 7190–7199. [Google Scholar] [CrossRef]
- Qi, J.; Liu, G. A robust high-accuracy ultrasound indoor positioning system based on a wireless sensor network. Sensors 2017, 11, 2554. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Ye, D.; Li, P.; Wang, R.; Li, Y. An RFID indoor positioning algorithm based on bayesian probability and k-nearest neighbor. Sensors 2017, 8, 1806. [Google Scholar] [CrossRef] [PubMed]
- Xiong, R.; Waasen, S.V.; Rheinlnder, C.; Wehn, N. Development of a novel indoor positioning system with mm-range precision based on RF sensors network. IEEE Sens. Lett. 2017, 1, 1–4. [Google Scholar] [CrossRef]
- Maqsood, B.; Naqvi, I.H. Sub-Nyquist rate UWB indoor positioning using power delay profile and time of arrival estimates. In Proceedings of the Vehicular Technology Conference, Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Chen, X.; Shen, C.; Gao, Q.; Zhou, Q.; Feng, G. Network scalability with weight analysis based on UWB indoor positioning system. In Proceedings of the IEEE Conference on Wireless Sensors, Langkawi, Malaysia, 10–12 October 2016; pp. 95–99. [Google Scholar]
- Jedari, E.; Wu, Z.; Rashidzadeh, R.; Saif, M. Wi-Fi based indoor location positioning employing random forest classifier. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–5. [Google Scholar]
- Moreira, A.; Nicolau, M.J.; Meneses, F.; Costa, A. Wi-Fi fingerprinting in the real world-RTLS@UM at the EvAAL competition. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–10. [Google Scholar]
- Nilsson, J.O.; Gupta, A.; Händel, P. Foot-mounted inertial navigation made easy. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 24–29. [Google Scholar]
- Patarot, A.; Boukallel, M.; Lamy-Perbal, S. A case study on sensors and techniques for pedestrian inertial navigation. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 25–26 February 2014; pp. 1–4. [Google Scholar]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M. Foot-mounted pedestrian navigation based on particle filter with an adaptive weight updating strategy. J. Navig. 2015, 68, 23–38. [Google Scholar] [CrossRef]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M.; Zhou, Z. An anchor-based pedestrian navigation approach using only inertial sensors. Sensors 2016, 16, 334. [Google Scholar] [CrossRef] [PubMed]
- Foxlin, E. Pedestrian Tracking with Shoe-mounted Inertial Sensors. IEEE Comput. Graphics Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Norrdine, A.; Kasmi, Z.; Blankenbach, J. Step detection for ZUPT-aided inertial pedestrian navigation system using foot-mounted permanent magnet. IEEE Sens. J. 2016, 16, 6766–6773. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Li, H.; Shu, Q.; Chen, Y.; Yang, W. Research on ZUPT technology for pedestrian navigation. In Proceedings of the International Conference on Mechanical and Aerospace Engineering, Prague, Czech Republic, 22–25 July 2017; pp. 725–729. [Google Scholar]
- Nilsson, J.O.; Skog, I.; Händel, P. Performance characterisation of foot-mounted ZUPT-aided INSs and other related systems. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–7. [Google Scholar]
- Nilsson, J.O.; Skog, I.; Händel, P. A note on the limitations of ZUPTs and the implications on sensor error modelling. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–4. [Google Scholar]
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU. In Proceedings of the 2010 7th Workshop on Positioning Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp: 135–143. [Google Scholar]
- Pasku, V.; Angelis, A.D.; Moschitta, A.; Carbone, P.; Nilsson, J.O.; Dwivedi, S.; Händel, P. A magnetic ranging-aided dead-reckoning positioning system for pedestrian applications. IEEE Trans. Instrum. Meas. 2016, 66, 953–963. [Google Scholar] [CrossRef]
- Wang, Q.; Luo, H.; Zhao, F.; Shao, W. An indoor self-localization algorithm using the calibration of the online magnetic fingerprints and indoor landmarks. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation, Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Kim, B.; Kong, S.H. A novel indoor positioning technique using magnetic fingerprint difference. IEEE Trans. Instrum. Meas. 2016, 65, 2035–2045. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A reliability-augmented particle filter for magnetic fingerprinting based indoor localization on smartphone. IEEE Trans. Mob. Comput. 2016, 15, 1877–1892. [Google Scholar] [CrossRef]
- Haris, A.M.; Valérie, R.; Gérard, L. Use of earth’s magnetic field for mitigating gyroscope errors regardless of magnetic perturbation. Sensors 2011, 11, 11390–11414. [Google Scholar] [CrossRef]
- Ma, M.; Song, Q.; Li, Y.; Gu, Y.; Zhou, Z. A heading error estimation approach based on improved Quasi-static magnetic Field detection. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation, Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Wahdan, A.; Georgy, J.; Abdelfatah, W.F.; Noureldin, A. Magnetometer calibration for portable navigation devices in vehicles using a fast and autonomous technique. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2347–2352. [Google Scholar] [CrossRef]
- Busato, A.; Paces, P.; Popelka, J. Magnetometer data fusion algorithms performance in indoor navigation: Comparison, calibration and testing. In Proceedings of the IEEE International Workshop on Metrology for Aerospace, Benevento, Italy, 29–30 May 2014; pp. 388–393. [Google Scholar]
- Renaudin, V.; Afzal, M.H.; Lachapelle, G. New method for magnetometers based orientation estimation. In Proceedings of the IEEE International Conference on Position Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 348–356. [Google Scholar]
- Vasconcelos, J.F.; Elkaim, G.; Silvestre, C.; Oliveira, P. Geometric approach to strapdown magnetometer calibration in sensor frame. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1293–1306. [Google Scholar] [CrossRef]
- Feng, W.; Liu, S.; Liu, S.; Yang, S. A calibration method of three-axis magnetic sensor based on ellipsoid fitting. J. Inf. Comput. Sci. 2013, 10, 1551–1558. [Google Scholar] [CrossRef]
- Fang, J.; Sun, H.; Cao, J.; Zhang, X.; Tao, Y. A novel calibration method of magnetic compass based on ellipsoid fitting. IEEE Trans. Instrum. Meas. 2011, 60, 2053–2061. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P.; Nilsson, J.; Rantakokko, J. Zero-velocity detection—an algorithm evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Skog, I.; Nilsson, J.O.; Handel, P. Pedestrian tracking using an IMU array. In Proceedings of the IEEE International Conference on Electronics, Computing and Communication Technologies, Bangalore, India, 6–7 January 2014; pp. 1–4. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Method | (mGs) | (mGs) | (rad) | R | |
| 137.95 | 75.26 | 0.973 | 0.896 | ||
| Clsef Method | |||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, M.; Song, Q.; Gu, Y.; Zhou, Z. Use of Magnetic Field for Mitigating Gyroscope Errors for Indoor Pedestrian Positioning. Sensors 2018, 18, 2592. https://doi.org/10.3390/s18082592
Ma M, Song Q, Gu Y, Zhou Z. Use of Magnetic Field for Mitigating Gyroscope Errors for Indoor Pedestrian Positioning. Sensors. 2018; 18(8):2592. https://doi.org/10.3390/s18082592
Chicago/Turabian StyleMa, Ming, Qian Song, Yang Gu, and Zhimin Zhou. 2018. "Use of Magnetic Field for Mitigating Gyroscope Errors for Indoor Pedestrian Positioning" Sensors 18, no. 8: 2592. https://doi.org/10.3390/s18082592
APA StyleMa, M., Song, Q., Gu, Y., & Zhou, Z. (2018). Use of Magnetic Field for Mitigating Gyroscope Errors for Indoor Pedestrian Positioning. Sensors, 18(8), 2592. https://doi.org/10.3390/s18082592