Hierarchical Lateral Control Scheme for Autonomous Vehicle with Uneven Time Delays Induced by Vision Sensors



Abstract
1. Introduction
2. Problem Formulation
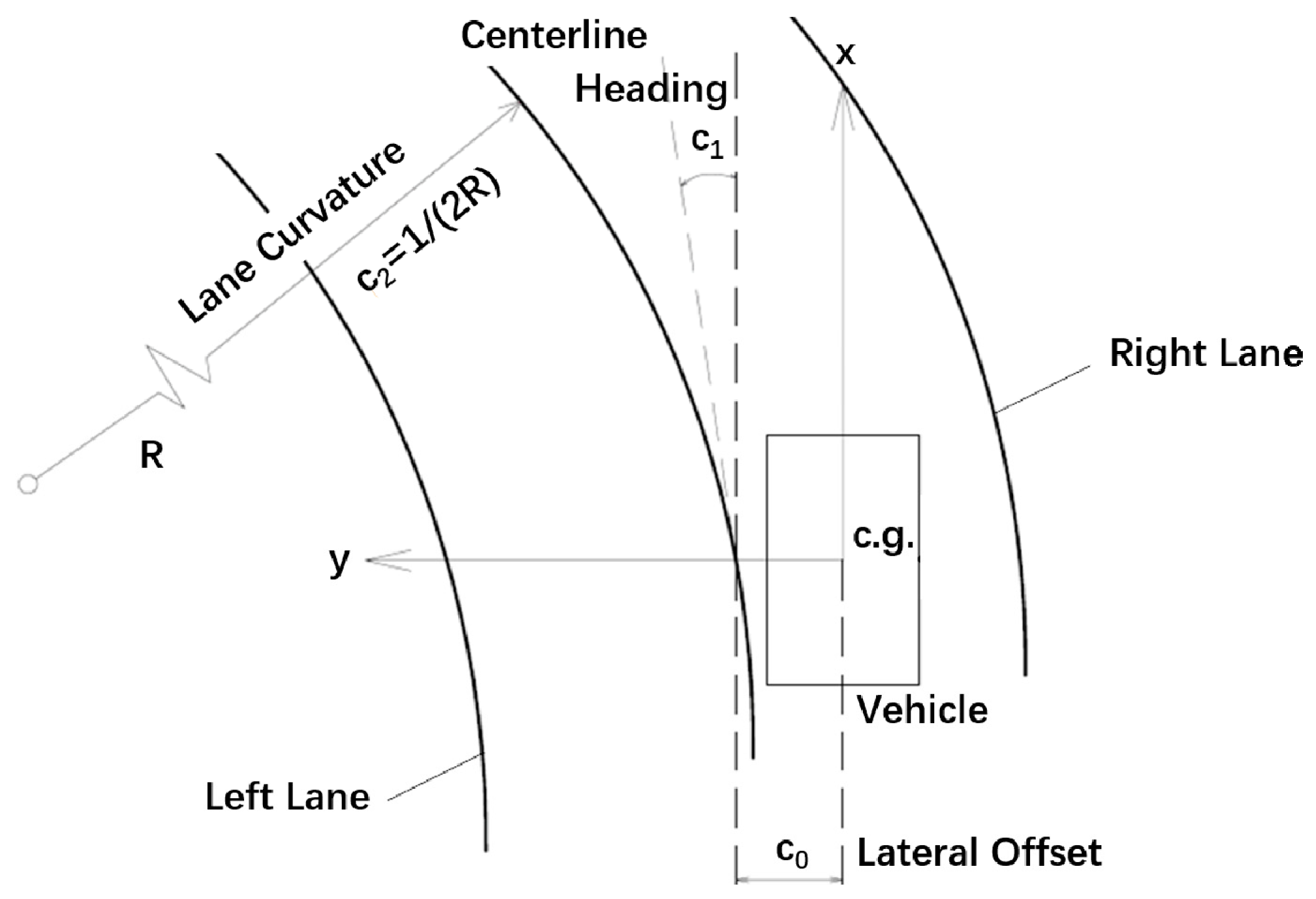
2.1. Lane and Vehicle Trajectory Modeling
2.2. Vehicle Modeling for Tracking Control
2.3. Control Model with Time-Varying Delays
2.4. Description of Time-Delay Uncertainties
3. Control Synthesis
3.1. Upper Controller
3.1.1. H∞-Based LQR Control
3.1.2. Vehicle Lateral Controller
3.2. Lower Controller
4. Experiments and Discussions
4.1. Verification of the Lower Controller Based on Vehicle Experiment
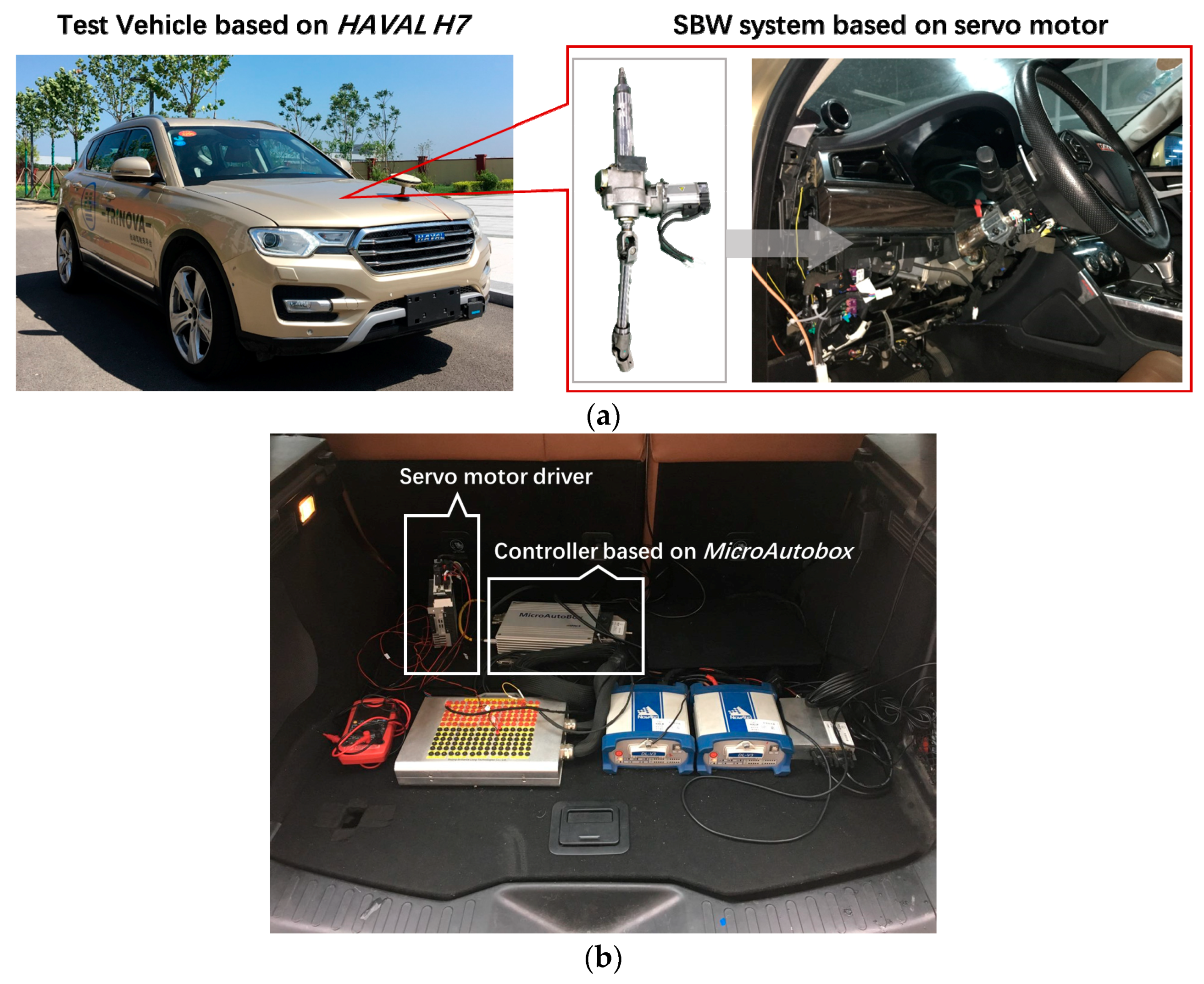
4.1.1. Platform and Test Conditions
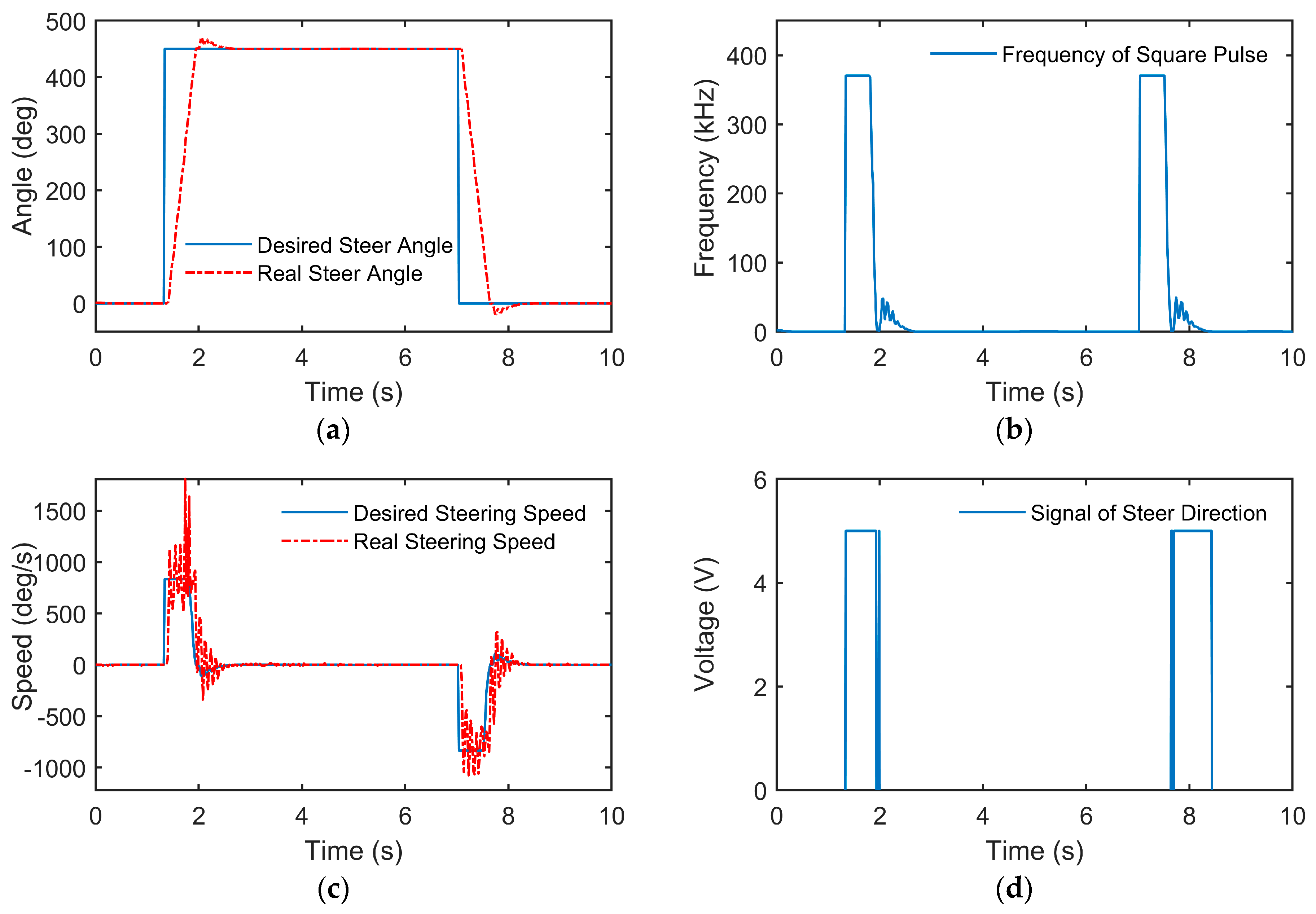
4.1.2. Results and Discussions
4.2. HIL Experiment for the Lateral Control Scheme
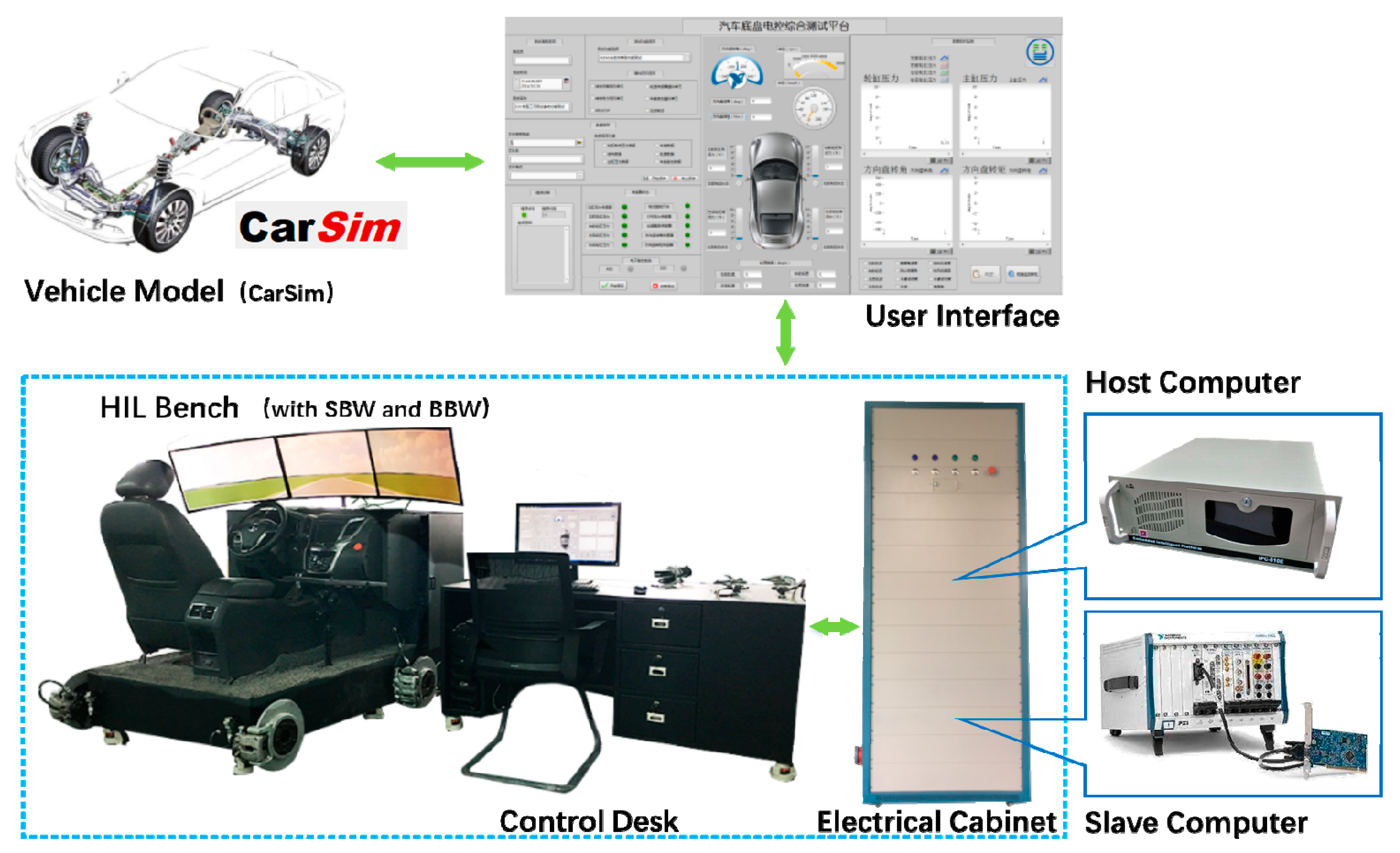
4.2.1. Platform
4.2.2. Experiment Condition
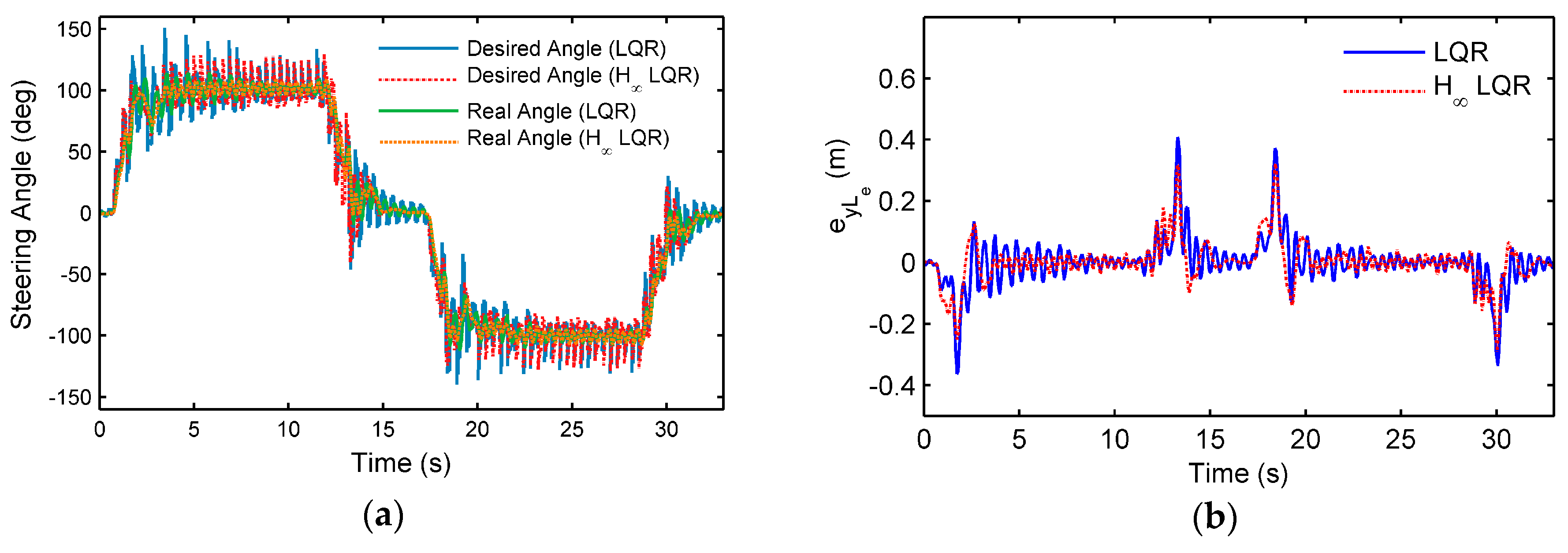
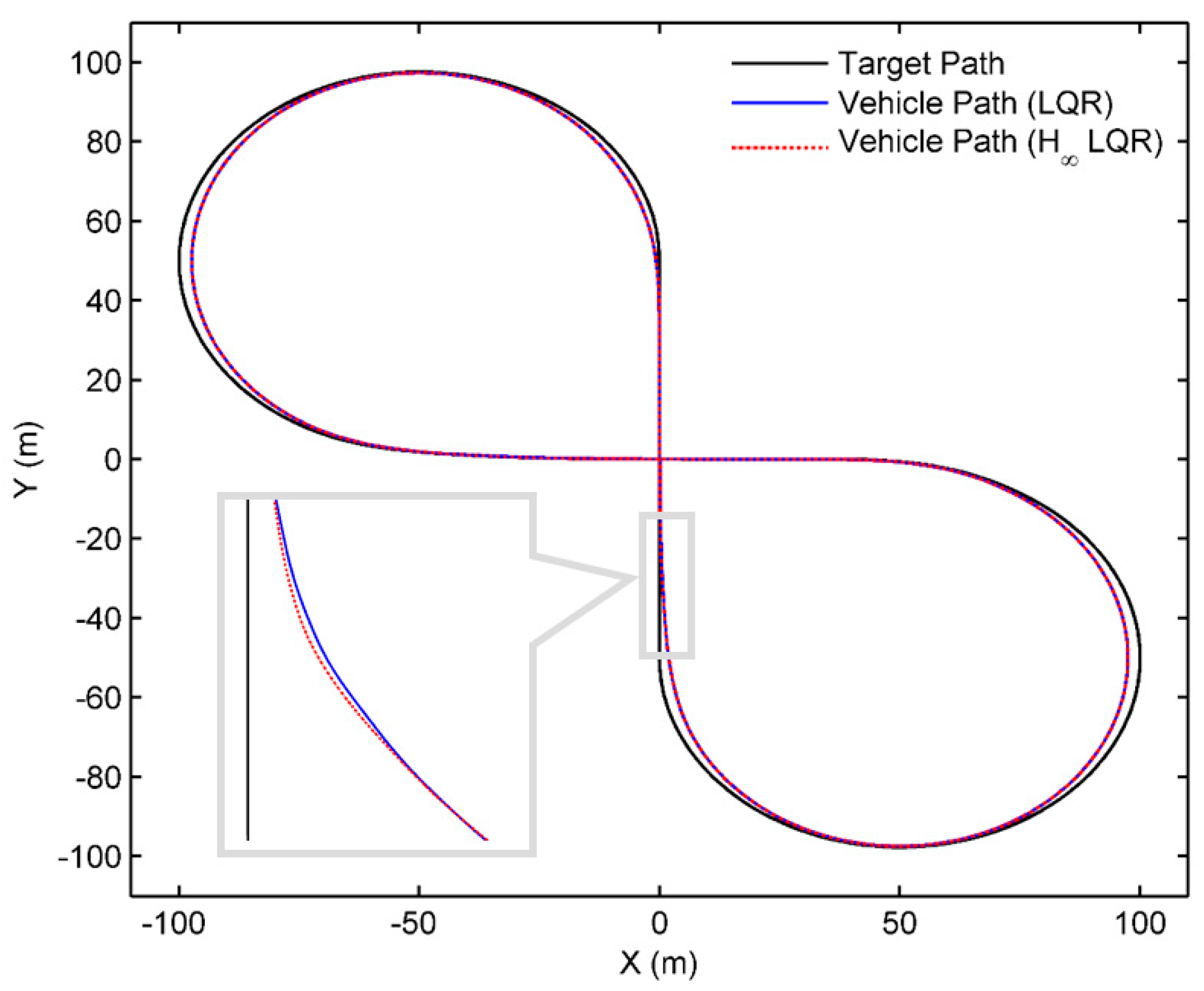
4.2.3. Results and Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Amer, N.H.; Zamzuri, H.; Hudha, K.; Kadir, Z.A. Modelling and Control Strategies in Path Tracking Control for Autonomous Ground Vehicles: A Review of State of the Art and Challenges. J. Int. Robot. Syst. 2016, 86, 1–30. [Google Scholar] [CrossRef]
- Hsiao, T. Robust Wheel Torque Control for Traction/Braking Force Tracking Under Combined Longitudinal and Lateral Motion. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1335–1347. [Google Scholar] [CrossRef]
- SAE-J3016. Taxonomy and Definitions for Terms Related to on-Road Motor Vehicle Automated Driving Systems; On-Road Automated Vehicle Standards Committee, Ed.; SAE: Warrendale, PA, USA, 2014. [Google Scholar]
- Kim, W.; Son, Y.S.; Chung, C.C. Torque-Overlay-Based Robust Steering Wheel Angle Control of Electrical Power Steering for a Lane-Keeping System of Automated Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4379–4392. [Google Scholar] [CrossRef]
- Ji, X.; Liu, Y.; He, X.; Yang, K.; Na, X.; Lv, C.; Liu, Y. Interactive Control Paradigm based Robust Lateral Stability Controller Design for Autonomous Automobile Path Tracking with Uncertain Disturbance: A Dynamic Game Approach. IEEE Trans. Veh. Technol. 2018, 56, 1344–1374. [Google Scholar] [CrossRef]
- Ji, X.; He, X.; Lv, C.; Liu, Y.; Wu, J. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits. Control Eng. Pract. 2018, 76, 41–53. [Google Scholar] [CrossRef]
- Ji, X.; Liu, Y.; Na, X.; Liu, Y. Research on interactive steering control strategy between driver and AFS in different game equilibrium strategies and information patterns. Veh. Syst. Dyn. 2018. [Google Scholar] [CrossRef]
- Han, G.; Fu, W.; Wang, W.; Wu, Z. The Lateral Tracking Control for the Intelligent Vehicle Based on Adaptive PID Neural Network. Sensors 2017, 17, 1244. [Google Scholar] [CrossRef] [PubMed]
- Martínezrey, M.; Espinosa, F.; Gardel, A.; Santos, C. On-Board Event-Based State Estimation for Trajectory Approaching and Tracking of a Vehicle. Sensors 2015, 15, 14569–14590. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Li, K.; Rajamani, R.; Wang, J. Model Predictive Multi-Objective Vehicular Adaptive Cruise Control. IEEE Trans. Control Syst. Technol. 2011, 19, 556–566. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Song, J. Fuel consumption optimization for smart hybrid electric vehicle during a car-following process. Mech. Syst. Signal Process. 2017, 87, 17–29. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M.; Jazar, R. Receding horizon lateral vehicle control for pure pursuit path tracking. J. Vib. Control 2017, 24. [Google Scholar] [CrossRef]
- Mashadi, B.; Mahmoudikaleybar, M.; Ahmadizadeh, P.; Oveisi, A. A path-following driver/vehicle model with optimized lateral dynamic controller. Lat. Am. J. Sol. Struct. 2013, 11, 613–630. [Google Scholar] [CrossRef]
- Sharp, R.S. Driver Steering Control and a New Perspective on Car Handling Qualities. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2005, 219, 1041–1051. [Google Scholar] [CrossRef]
- Falcone, P.; Borrelli, F.; Asgari, J.; Tseng, H.E.; Hrovat, D. Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Trans. Control Syst. Technol. 2007, 15, 566–580. [Google Scholar] [CrossRef]
- Martins, F.N.; Celeste, W.C.; Carelli, R.; Sarcinelli-Filho, M.; Bastos-Filho, T.F. An adaptive dynamic controller for autonomous mobile robot trajectory tracking. Control Eng. Pract. 2008, 16, 1354–1363. [Google Scholar] [CrossRef]
- Cerone, V.; Milanese, M.; Regruto, D. Combined Automatic Lane-Keeping and Driver’s Steering Through a 2-DOF Control Strategy. IEEE Trans. Control Syst. Technol. 2008, 17, 135–142. [Google Scholar] [CrossRef]
- Talvala, K.L.R.; Kritayakirana, K.; Gerdes, J.C. Pushing the limits: From lane keeping to autonomous racing. Annu. Rev. Control. 2011, 35, 137–148. [Google Scholar] [CrossRef]
- Netto, M.S.; Chaib, S.; Mammar, S. Lateral adaptive control for vehicle lane keeping. In Proceedings of the 2004 American Control Conference. Boston, MA, USA, USA, 30 June–2 July 2004; Volume 3, pp. 2693–2698. [Google Scholar]
- Olivares-Mendez, M.A.; Sanchez-Lopez, J.L.; Jimenez, F.; Campoy, P.; Sajadi-Alamdari, S.A.; Voos, H. Vision-Based Steering Control, Speed Assistance and Localization for Inner-City Vehicles. Sensors 2016, 16, 362. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Tofael, A.; Yan, Z.; Gao, P.; Takigawa, T. Vision-Based Leader Vehicle Trajectory Tracking for Multiple Agricultural Vehicles. Sensors 2016, 16, 578. [Google Scholar] [CrossRef] [PubMed]
- Vetrella, A.R.; Fasano, G.; Accardo, D.; Moccia, A. Differential GNSS and Vision-Based Tracking to Improve Navigation Performance in Cooperative Multi-UAV Systems. Sensors 2016, 16, 2164. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Nguyen, B.M.; Fujimoto, H.; Hori, Y. Vision-based integrated lateral control system for electric vehicles considering multi-rate and measurable uneven time delay issues. In Proceedings of the IEEE International Symposium Industrial Electronics, Taipei, Taiwan, 28–31 May 2013; pp. 1–6. [Google Scholar]
- Wang, Y.; Zhou, Z.; Wei, C.; Liu, Y.; Yin, C. Host-Target Vehicle Model-based Lateral State Estimation for Preceding Target Vehicles Considering Measurement Delay. IEEE Trans. Ind. Inf. 2018. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Fujimoto, H.; Hori, Y. Vision-Based Lateral State Estimation for Integrated Control of Automated Vehicles considering Multi-rate and Uneven Measurement Delay Issues. IEEE/ASME Trans. Mechatron. 2018, in press. [Google Scholar]
- Yan, L.; Liu, B.; Zhou, D. The modeling and estimation of asynchronous multirate multisensor dynamic systems. Aerosp. Sci. Technol. 2006, 10, 63–71. [Google Scholar] [CrossRef]
- Son, Y.S.; Kim, W.; Lee, S.; Chung, C.C. Robust Multirate Control Scheme With Predictive Virtual Lanes for Lane-Keeping System of Autonomous Highway Driving. IEEE Trans. Veh. Technol. 2015, 64, 3378–3391. [Google Scholar] [CrossRef]
- Lee, S.; Chung, C.C. Robust Multirate On-Road Vehicle Localization for Autonomous Highway Driving Vehicles. IEEE Trans. Control Syst. Technol. 2017, 25, 577–589. [Google Scholar] [CrossRef]
- Kang, C.; Sung Gu, Y.; Jeon, S.; Son, Y.; Kim, W.; Lee, S.; Chung, C. Lateral Control System for Autonomous Lane Change System on Highways. SAE Int. J. Passeng. Cars-Mech. Syst. 2016, 9. [Google Scholar] [CrossRef]
- Kim, W.; Chung, C. Robust output feedback control for unknown non-linear systems with external disturbance. IET Control Theory Appl. 2016, 10, 173–182. [Google Scholar] [CrossRef]
- Liu, Y.; Fan, X.; Lv, C.; Wu, J.; Li, T. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles. Mech. Syst. Signal Process. 2017, 100, 605–616. [Google Scholar] [CrossRef]
- Schlatow, J.; Möstl, M.; Ernst, R.; Nolte, M.; Jatzkowski, I.; Maurer, M. Towards model-based integration of component-based automotive software systems. In Proceedings of the Annual Conference of the IEEE Ind. Electron. Society (IECON17), Beijing, China, 29 October–1 November 2017; pp. 8425–8432. [Google Scholar]
- Shuai, Z.; Zhang, H.; Wang, J.; Li, J.; Ouyang, M. Combined AFS and DYC Control of Four-Wheel-Independent-Drive Electric Vehicles over CAN Network with Time-Varying Delays. IEEE Trans. Veh. Technol. 2014, 63, 591–602. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, H.; Wang, J.; Fang, Z. Robust Lateral Motion Control of Electric Ground Vehicles with Random Network-Induced Delays. IEEE Trans. Veh. Technol. 2015, 64, 4985–4995. [Google Scholar] [CrossRef]
- Wang, R.; Jing, H.; Wang, J.; Chadli, M.; Chen, N. Robust Output-feedback Based Vehicle Lateral Motion Control Considering Network-induced Delay and Tire Force Saturation. Neurocomputing 2016, 214, 409–419. [Google Scholar] [CrossRef]
- Huang, C.; Du, H.; Naghdy, F.; Li, W. Robust fuzzy tracking control of uncertain steer-by-wire systems with network time delays. In Proceedings of the 2015 Australasian Universities Power Engineering Conference (AUPEC), Wollongong, NSW, Australia, 27–30 September 2015; pp. 1–5. [Google Scholar]
- Zakaria, M.I.; Husain, A.R.; Mohamed, Z.; Fezazi, N.E.; Shah, M.B.N. Lyapunov-Krasovskii stability condition for system with bounded delay—An application to steer-by-wire system. In Proceedings of the 2015 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), George Town, Malaysia, 27–29 November 2015; pp. 543–547. [Google Scholar]
- Xie, R.; Zhang, T.; Li, J.; Dai, M. Compensating Unknown Time-Varying Delay in Opto-Electronic Platform Tracking Servo System. Sensors 2017, 17, 1071. [Google Scholar] [CrossRef] [PubMed]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer: New York, NY, USA, 2012. [Google Scholar]
- Guldner, J.; Tan, H.-S.; Patwardhan, S. Analysis of Automatic Steering Control for Highway Vehicles with Look-down Lateral Reference Systems. Veh. Syst. Dyn. 1996, 26, 243–269. [Google Scholar] [CrossRef]
- Van der El, K.; Pool, D.M.; Damveld, H.J.; Van Paassen, M.M.; Mulder, M. An Empirical Human Controller Model for Preview Tracking Tasks. IEEE Trans. Cybern. 2016, 46, 2609–2621. [Google Scholar] [CrossRef] [PubMed]
- Gielen, R.H.; Olaru, S.; Lazar, M.; Heemels, W.P.M.H.; Wouw, N.; Niculescu, S.I. On polytopic inclusions as a modeling framework for systems with time-varying delays. Automatica 2010, 46, 615–619. [Google Scholar] [CrossRef]
- Hetel, L.; Daafouz, J.; Iung, C. Stabilization of Arbitrary Switched Linear Systems with Unknown Time-Varying Delays. IEEE Trans. Autom. Control 2006, 51, 1668–1674. [Google Scholar] [CrossRef]
- Zhang, H.; Shi, Y.; Mu, B. Optimal H∞-Based Linear-Quadratic Regulator Tracking Control for Discrete-Time Takagi–Sugeno Fuzzy Systems with Preview Actions. J. Dyn. Syst. Meas. Control. 2013, 135, 044501. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Meaning |
|---|---|---|
| 180° | Threshold of large angle difference | |
| 90° | Threshold of mid angle difference | |
| 10° | Threshold of small angle difference | |
| 1.028 | Frequency coefficient | |
| 25 | Conversion factor of the motor speed | |
| 60 | Conversion factor of the motor speed | |
| 90 | Conversion factor of the motor speed | |
| 110 | Conversion factor of the motor speed | |
| 830°/s | Maximum limit of the rotation speed | |
| 0.1°/s | Minimum limit of the rotation speed |
| Index | Value | Meaning |
|---|---|---|
| Overshoot | 4.5% | The percentage of the angle value that the real angle exceeds the desired angle during the rotation of the steering wheel. |
| Steady-state angular error | 0.1° | Steady-state error when the real angle of the steering wheel achieves to the desired angle. |
| Maximum time delay | 70 ms | Maximum time difference between the time when the desired angle command is transmitted on the CAN bus and the time when the real angle starts to change. |
| Controller | |||||
|---|---|---|---|---|---|
| H∞-based LQR | 1.9598 | 0.0706 | 0.4283 | 0.0374 | 0.0623 |
| Conventional LQR | 2.3415 | 0.0770 | 0.5107 | 0.0370 | 0.0667 |
| Optimization | 16.3% | 8.3% | 16.1% | −1.3% | 6.6% |
| Controller | H∞-based LQR | Conventional LQR |
|---|---|---|
| Performance | It shows better path-tracking performance, and has smaller position error, less chattering during driving. | The path-tracking can be completed with acceptable position error, but the vehicle chatters a lot, which may reduce ride comfort. |
| Implementation considerations | Calculations can be implemented offline, with no need for high computational performance of hardware. However, the range of the sensor’s time-delay needs to be known by prior experiments. | Calculations can be implemented offline, and real-time computing load is almost the same as the proposed method in this paper. |
| Complexity | Mathematical principle is more complicated, but the control law in real-time is simple. | Mathematical principle is simpler, and the control law in real-time is simple. |
| Stability | Both controllers are stable because they are mathematically proven. However, since the dynamic model of the vehicle is linear, when the vehicle is running under extreme non-linear conditions, the model may have a large error compared with vehicle’s response characteristics in real scenarios and the controller may be unstable. | |
| Re-usability | The controller is reusable in other plants when the response characteristics of the vehicle and the time-delay characteristics of the vision sensor experience no significant changes. | The controller is reusable when the response characteristics of the vehicle do not change significantly. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Liu, Y.; Liu, C.; Chen, B.; Zhang, W.; Li, L.; Ji, X. Hierarchical Lateral Control Scheme for Autonomous Vehicle with Uneven Time Delays Induced by Vision Sensors. Sensors 2018, 18, 2544. https://doi.org/10.3390/s18082544
Liu Q, Liu Y, Liu C, Chen B, Zhang W, Li L, Ji X. Hierarchical Lateral Control Scheme for Autonomous Vehicle with Uneven Time Delays Induced by Vision Sensors. Sensors. 2018; 18(8):2544. https://doi.org/10.3390/s18082544
Chicago/Turabian StyleLiu, Qi, Yahui Liu, Congzhi Liu, Baiming Chen, Wenhao Zhang, Liang Li, and Xuewu Ji. 2018. "Hierarchical Lateral Control Scheme for Autonomous Vehicle with Uneven Time Delays Induced by Vision Sensors" Sensors 18, no. 8: 2544. https://doi.org/10.3390/s18082544
APA StyleLiu, Q., Liu, Y., Liu, C., Chen, B., Zhang, W., Li, L., & Ji, X. (2018). Hierarchical Lateral Control Scheme for Autonomous Vehicle with Uneven Time Delays Induced by Vision Sensors. Sensors, 18(8), 2544. https://doi.org/10.3390/s18082544