An Egg Volume Measurement System Based on the Microsoft Kinect

 ,
, 
Abstract
1. Introduction
2. System Design Prototype, Mathematical Models and Algorithm
2.1. Proposed Measurement System Overview
2.2. Microsoft Kinect 2.0
2.3. Geometric Models of the Egg Shell
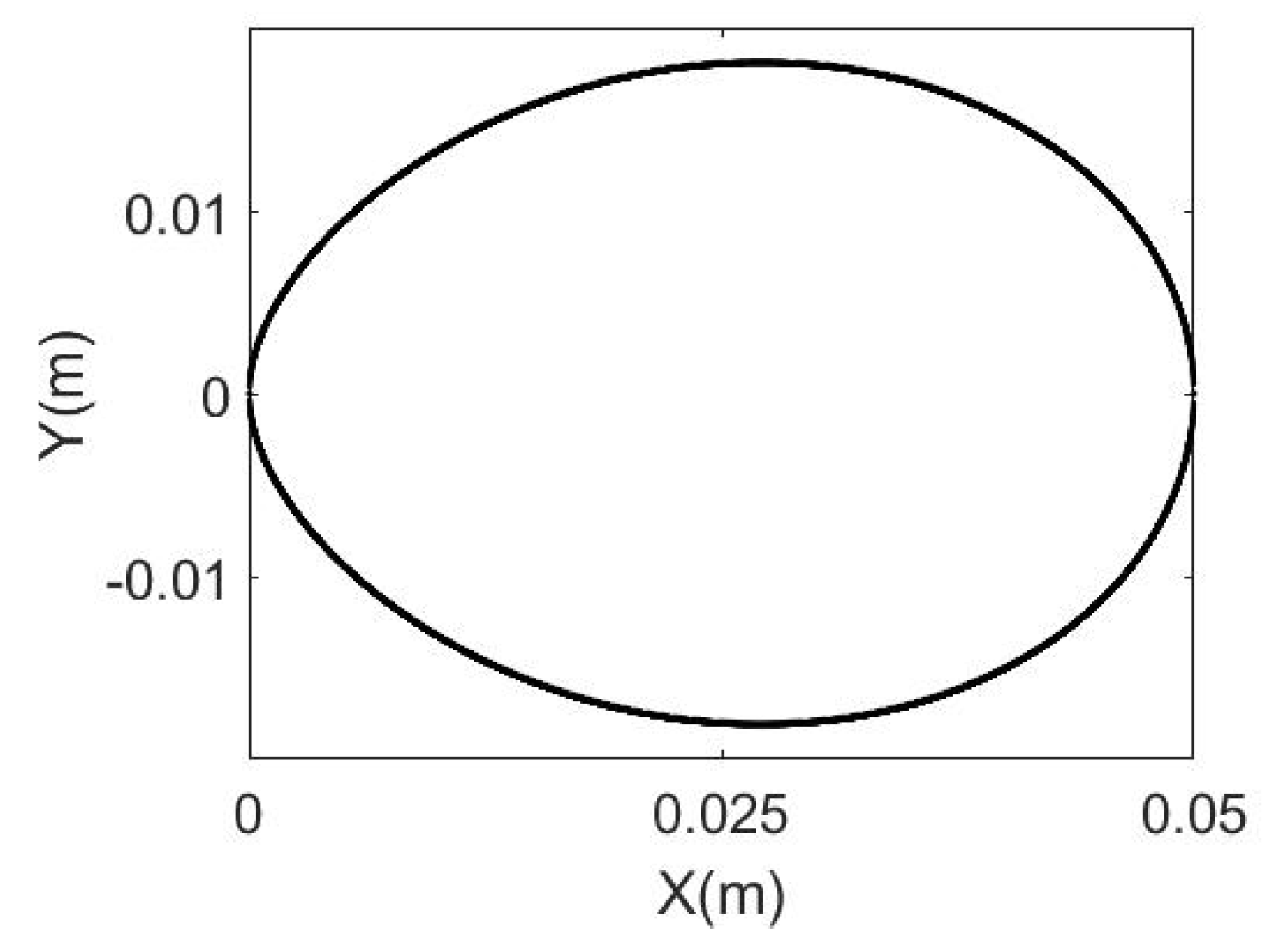
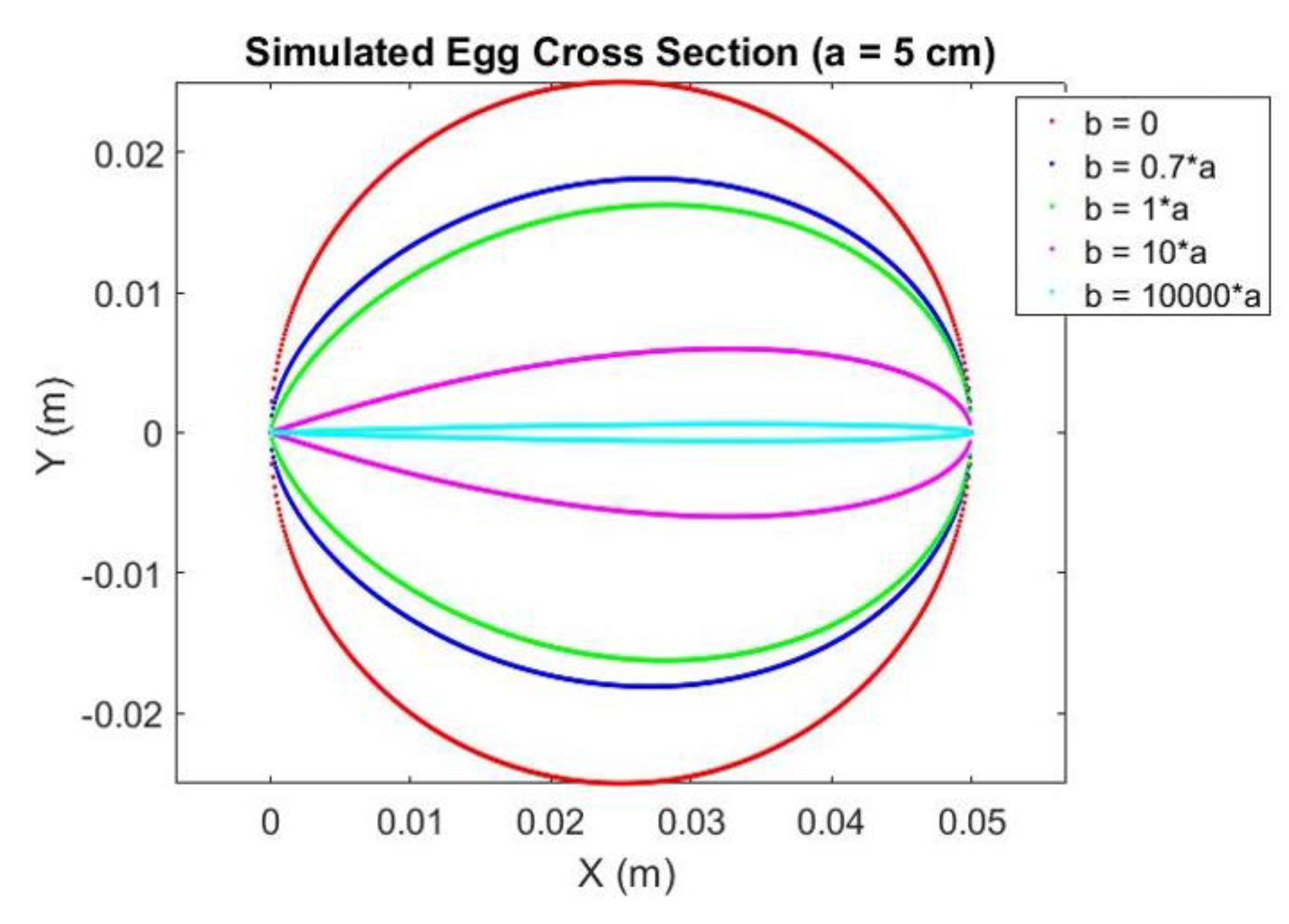
2.3.1. 2D Egg Models
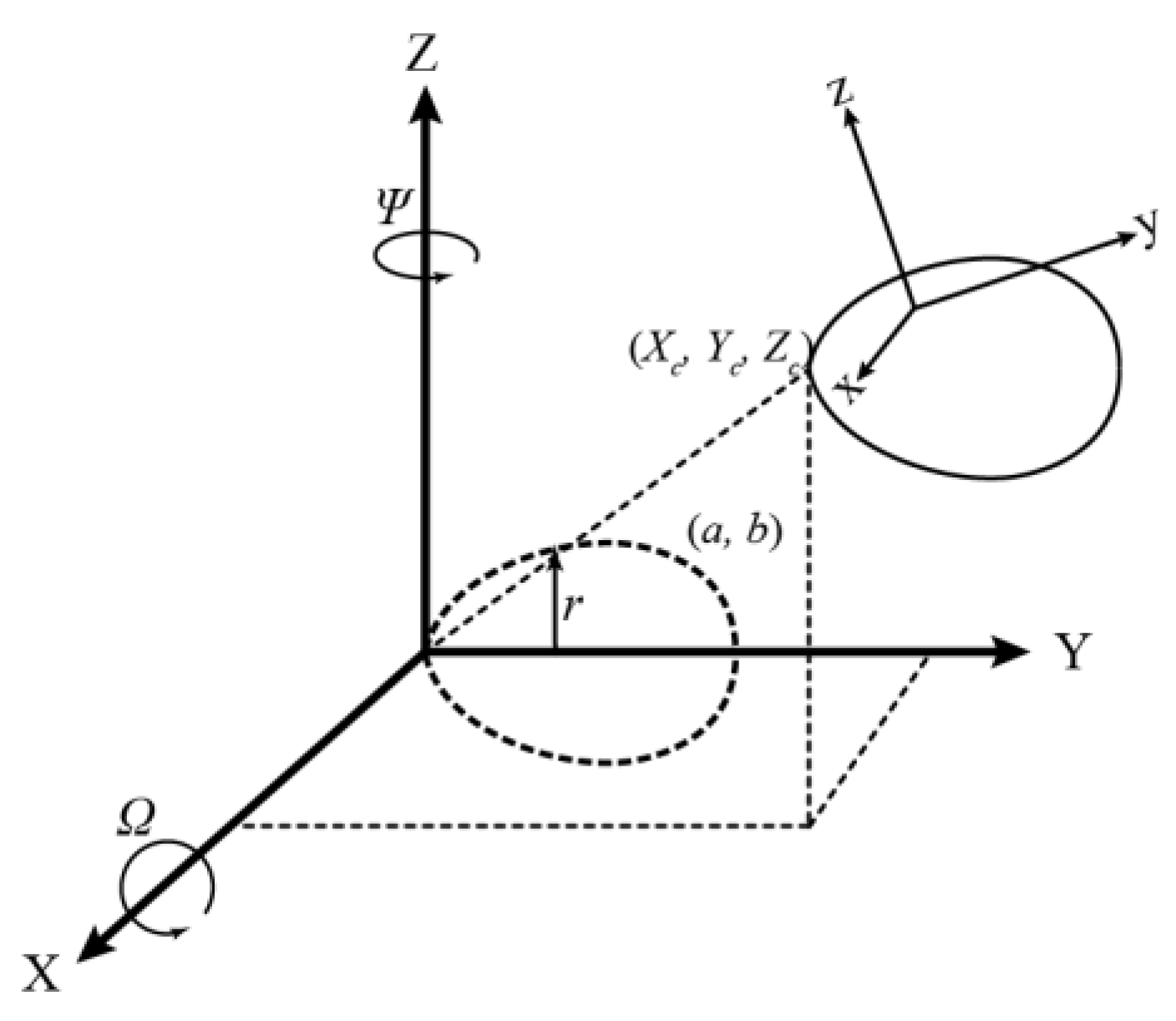
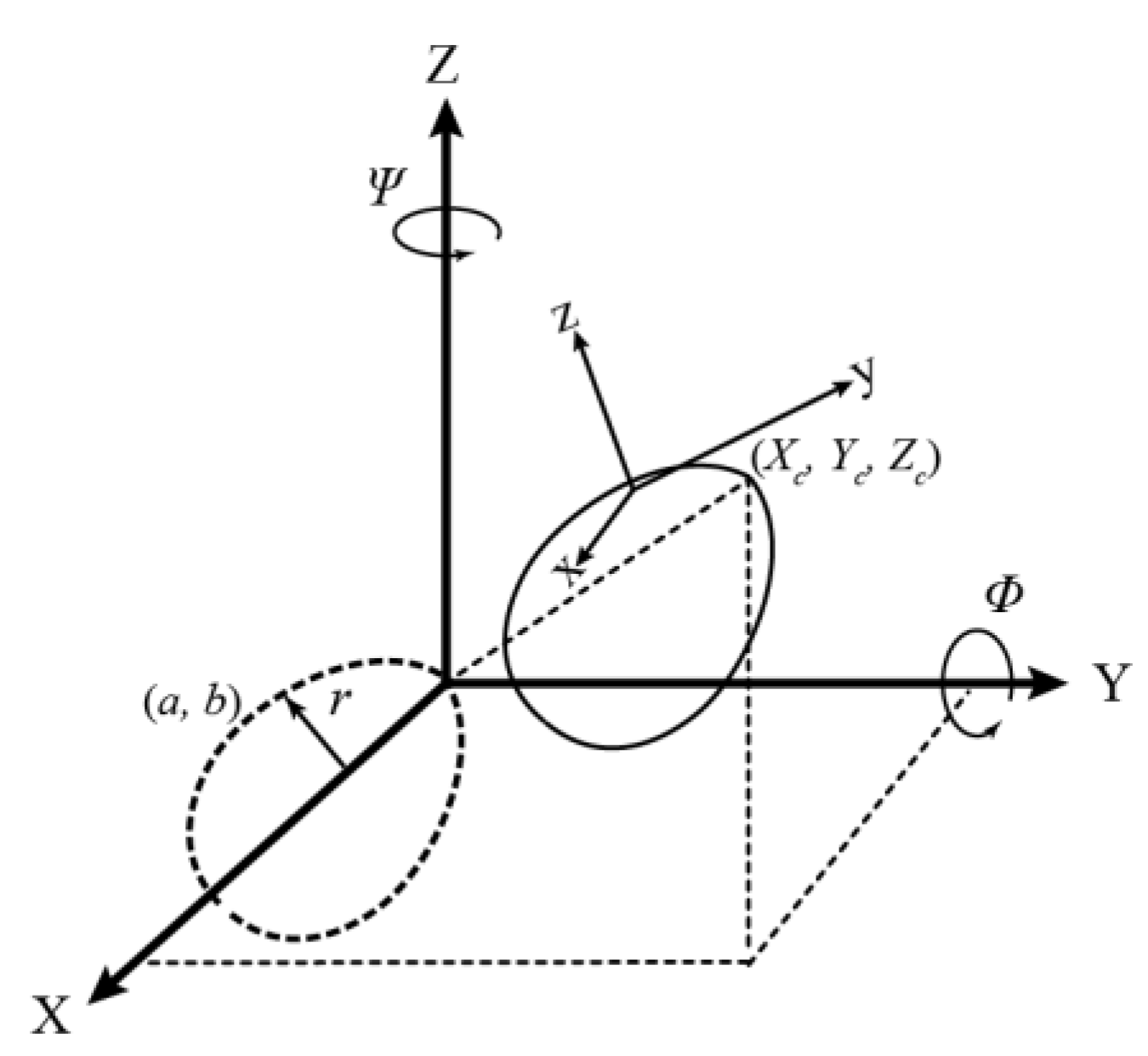
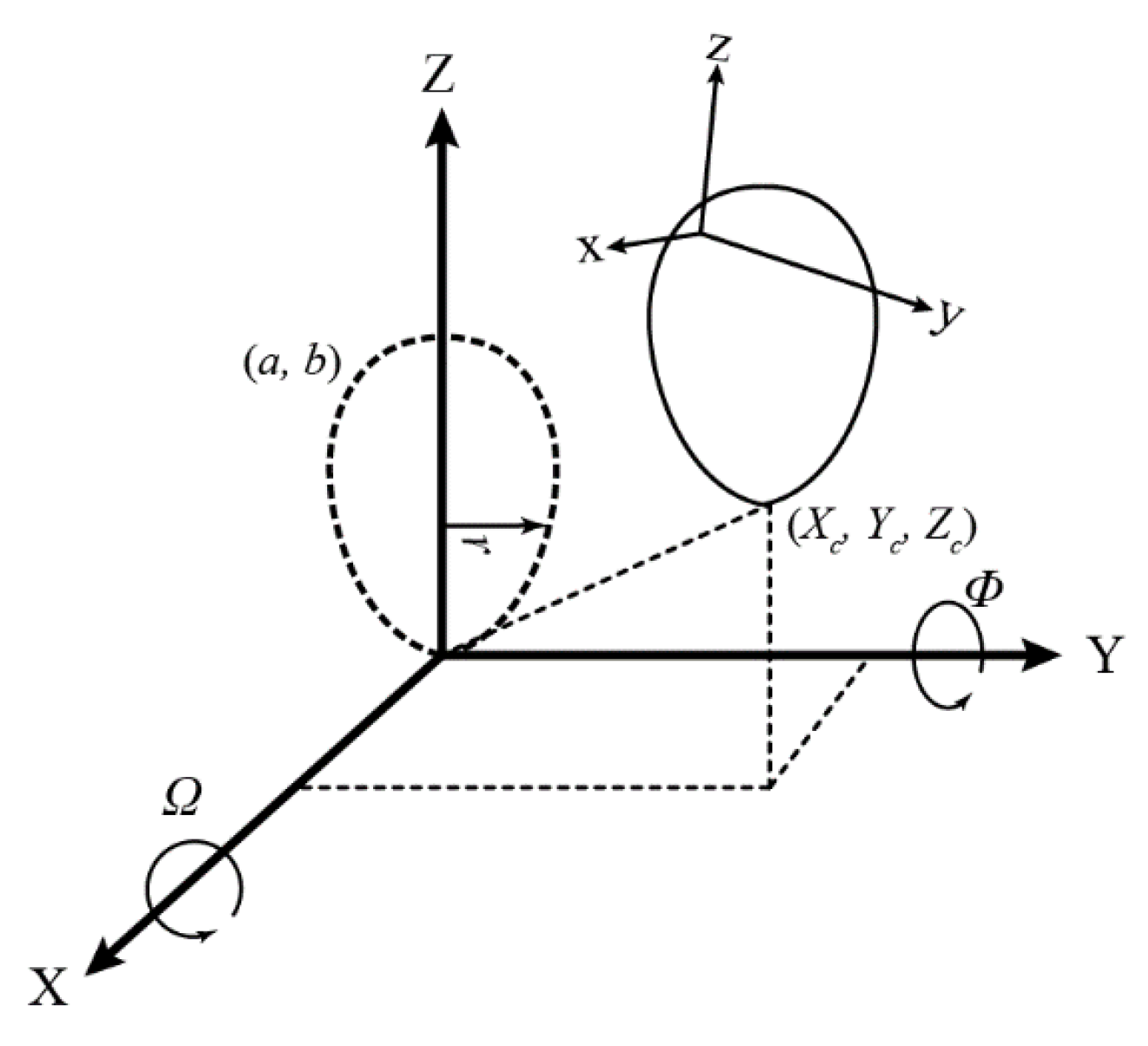
2.3.2. Proposed 3D Egg Models
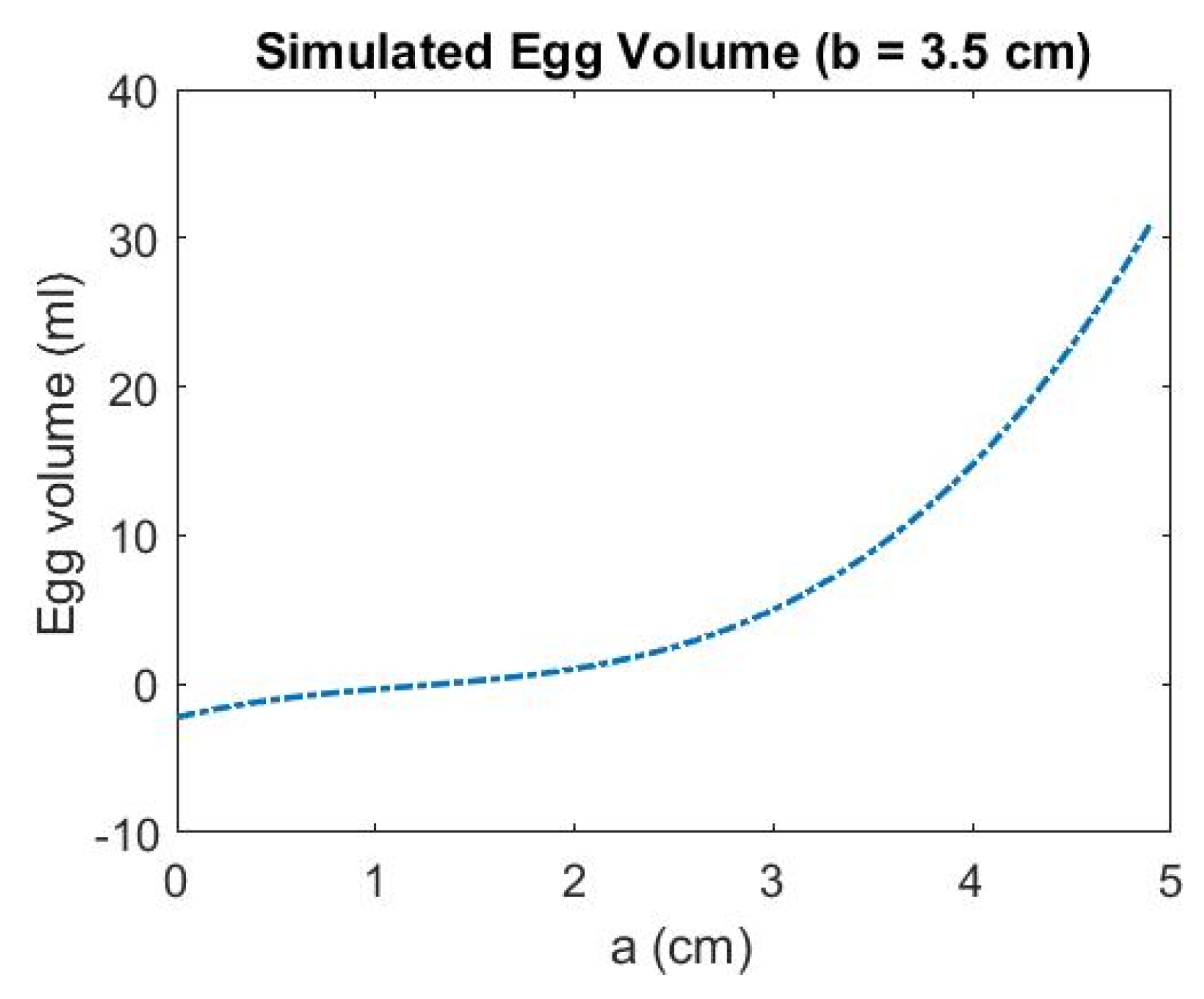
2.4. Volume Estimation Method
2.5. Proposed Processing Algorithm
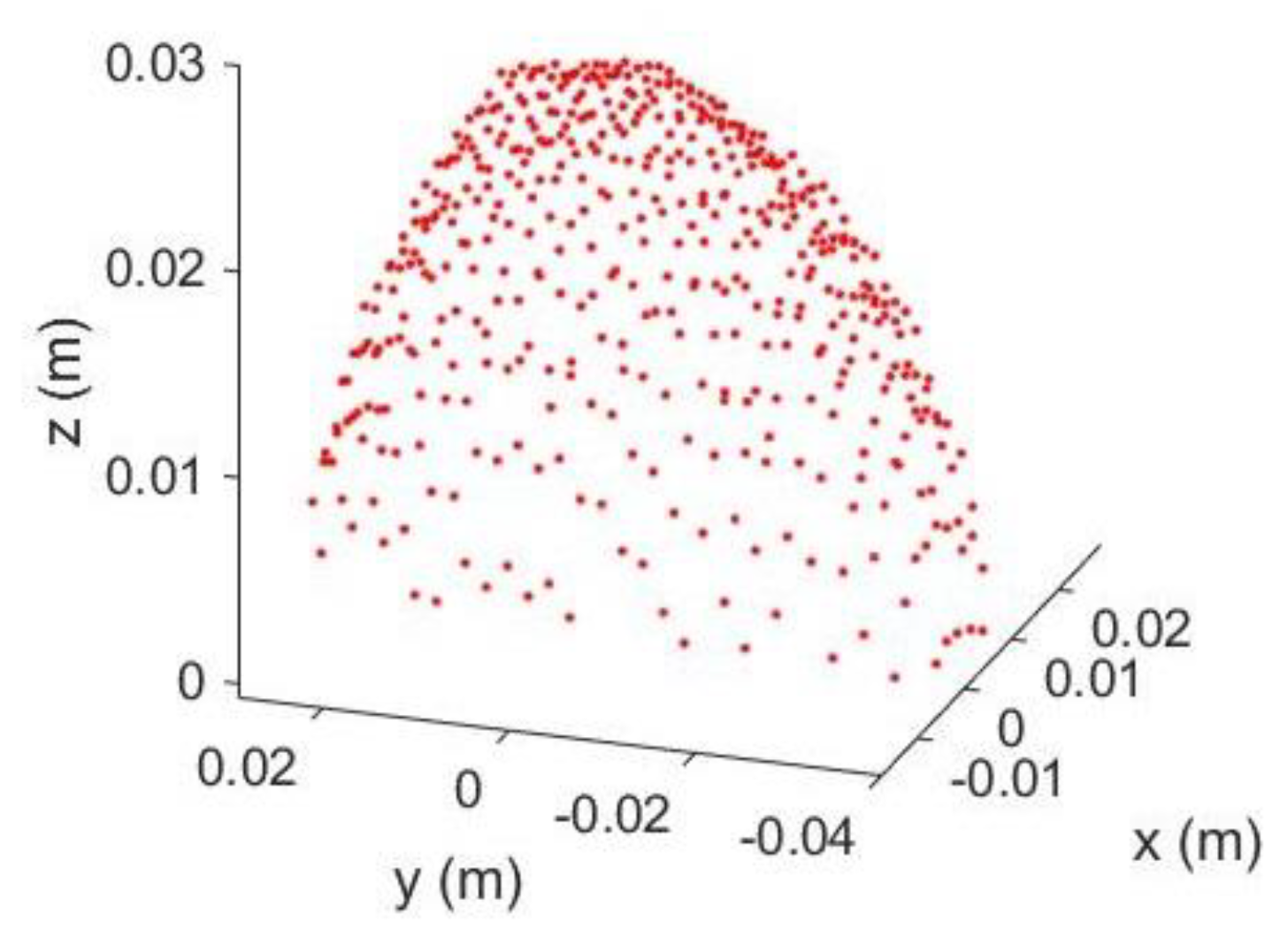
2.5.1. Automatic Egg Extraction from Raw Point Cloud
2.5.2. Initial Value Computation Algorithm for the Models
3. Experiments
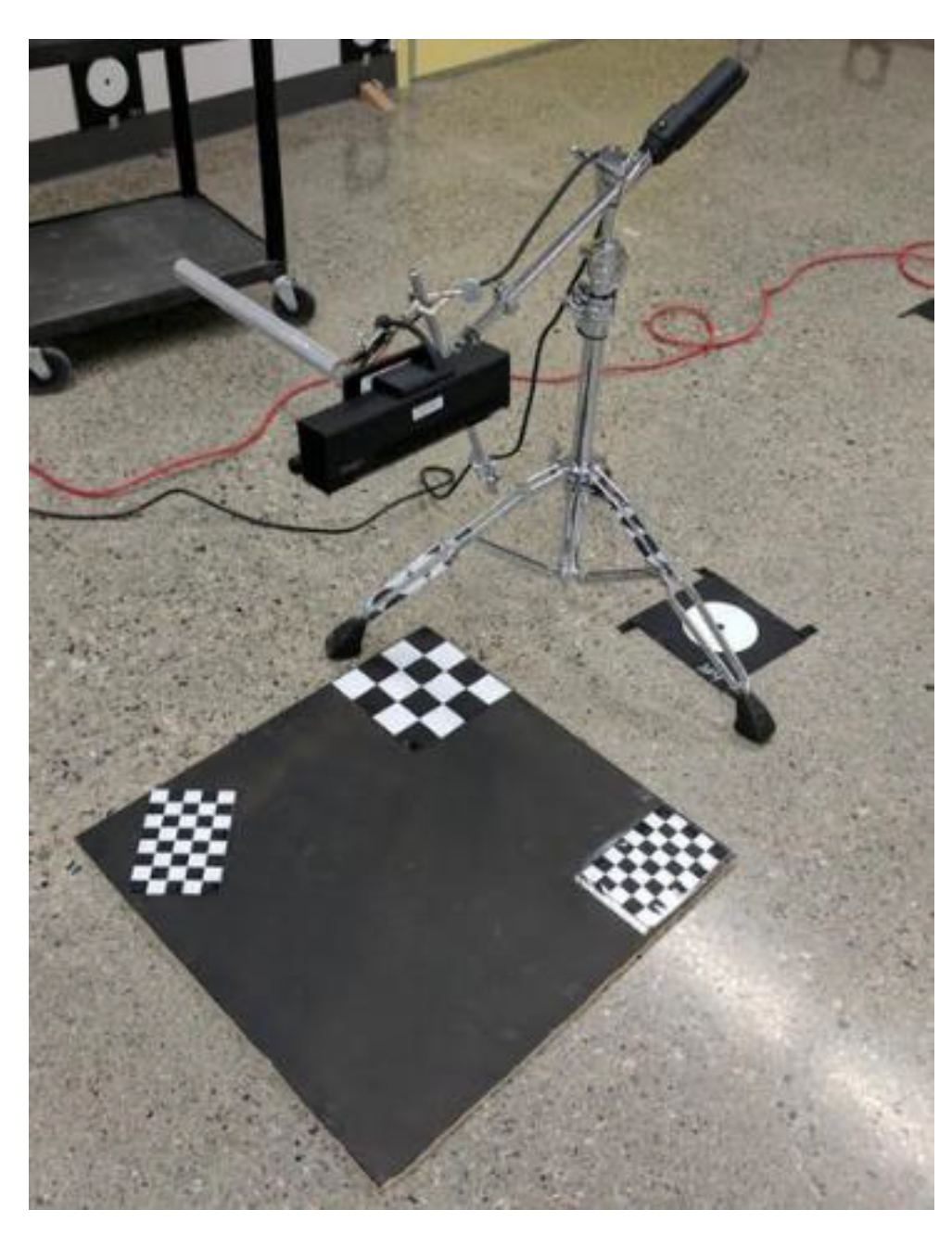
3.1. Experimental Setup
3.2. Assumption
- The Kinect-to-Egg distances were initially measured manually by using tapes, and the adjusted distances was performed according to markers found on the tripod. The overall measurement error is assumed to be ±1 cm.
- The reference egg volumes were mainly obtained using the water displacement method which is based on the Archimedes Principle. The precision for the water displacement was assumed to be ±2 mL for all the volumes.
- The precision of the Kinect’s captured point cloud for the eggs is set to be ±1 mm for the least-squares fitting.
4. Results and Analysis
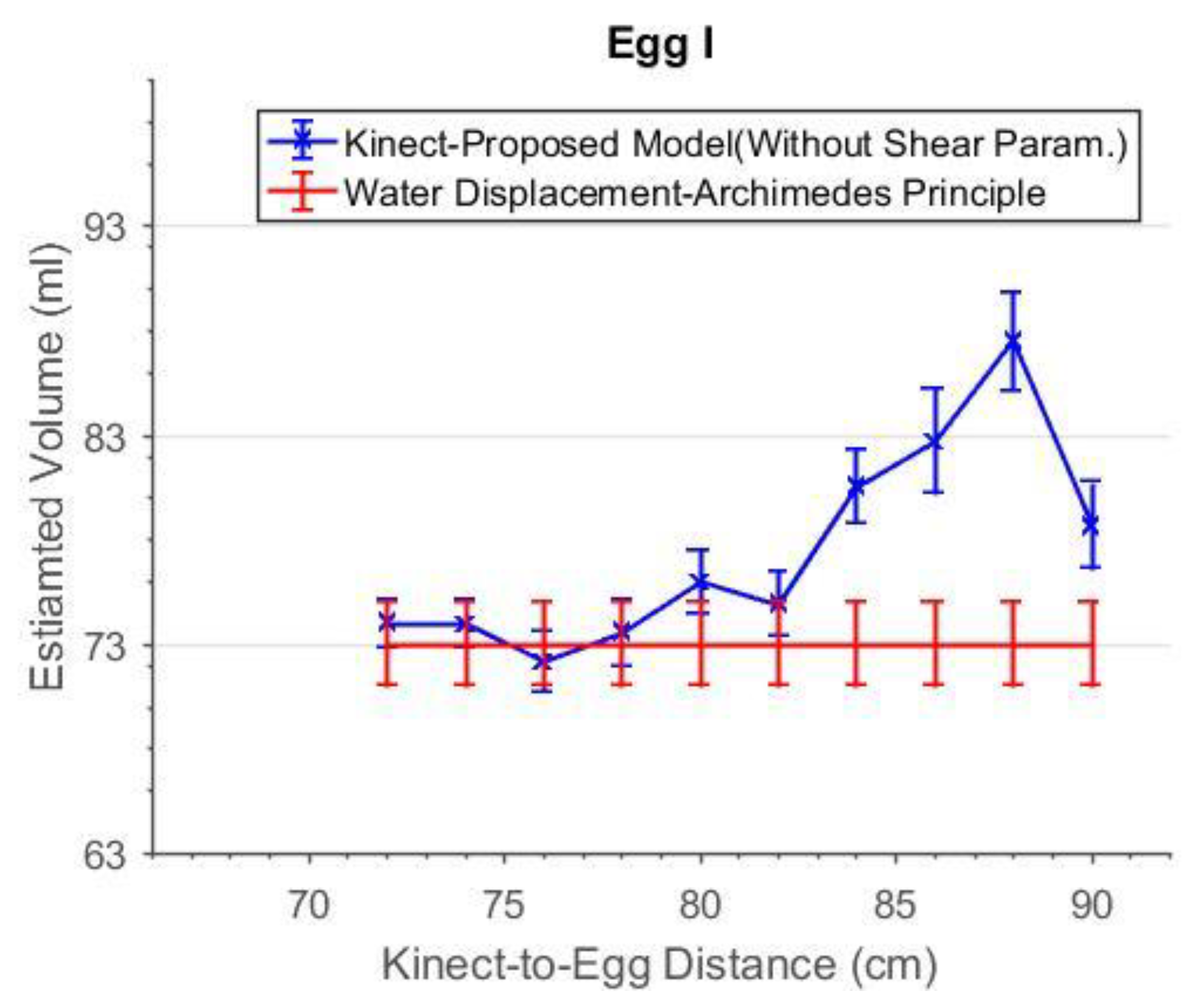
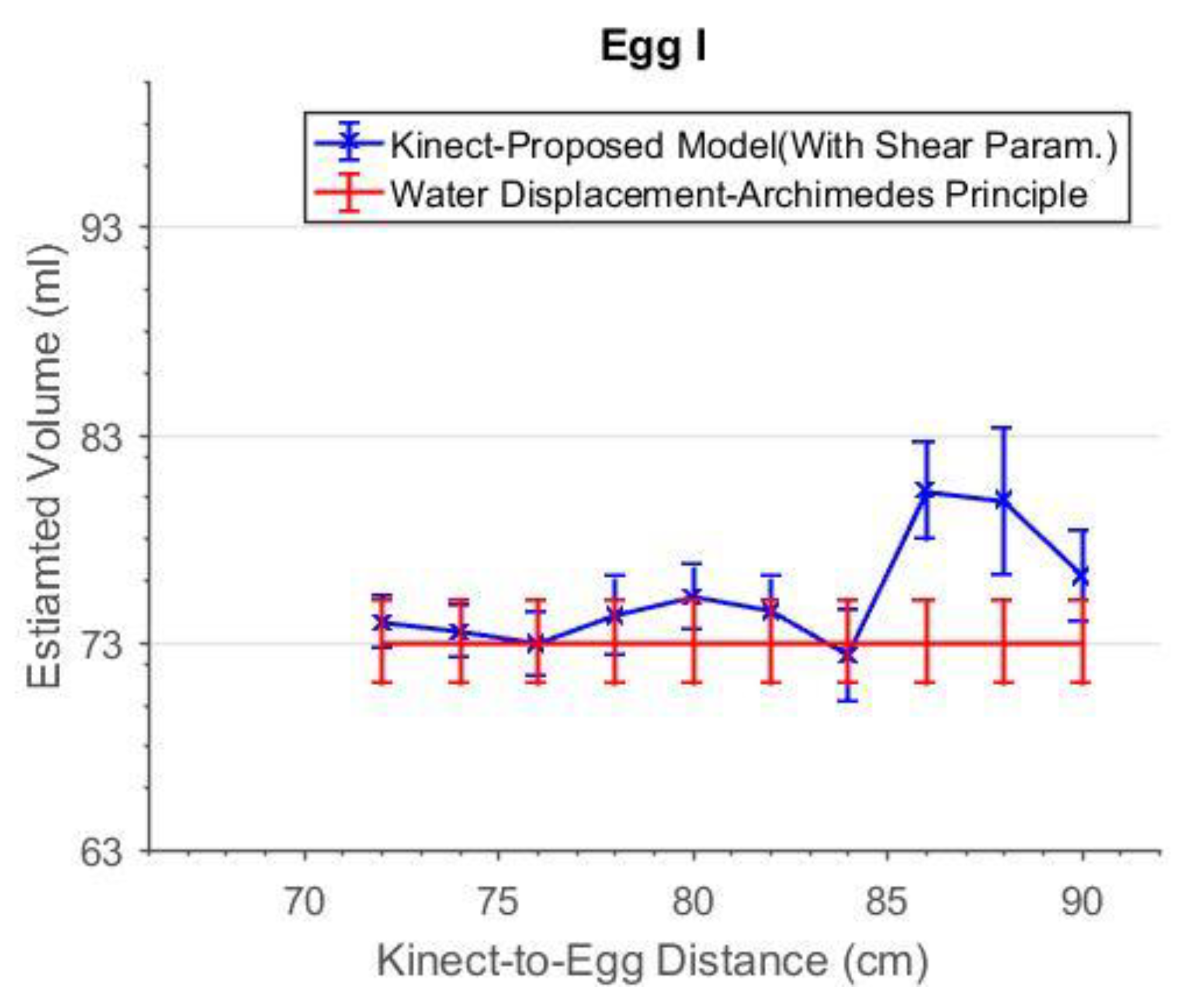
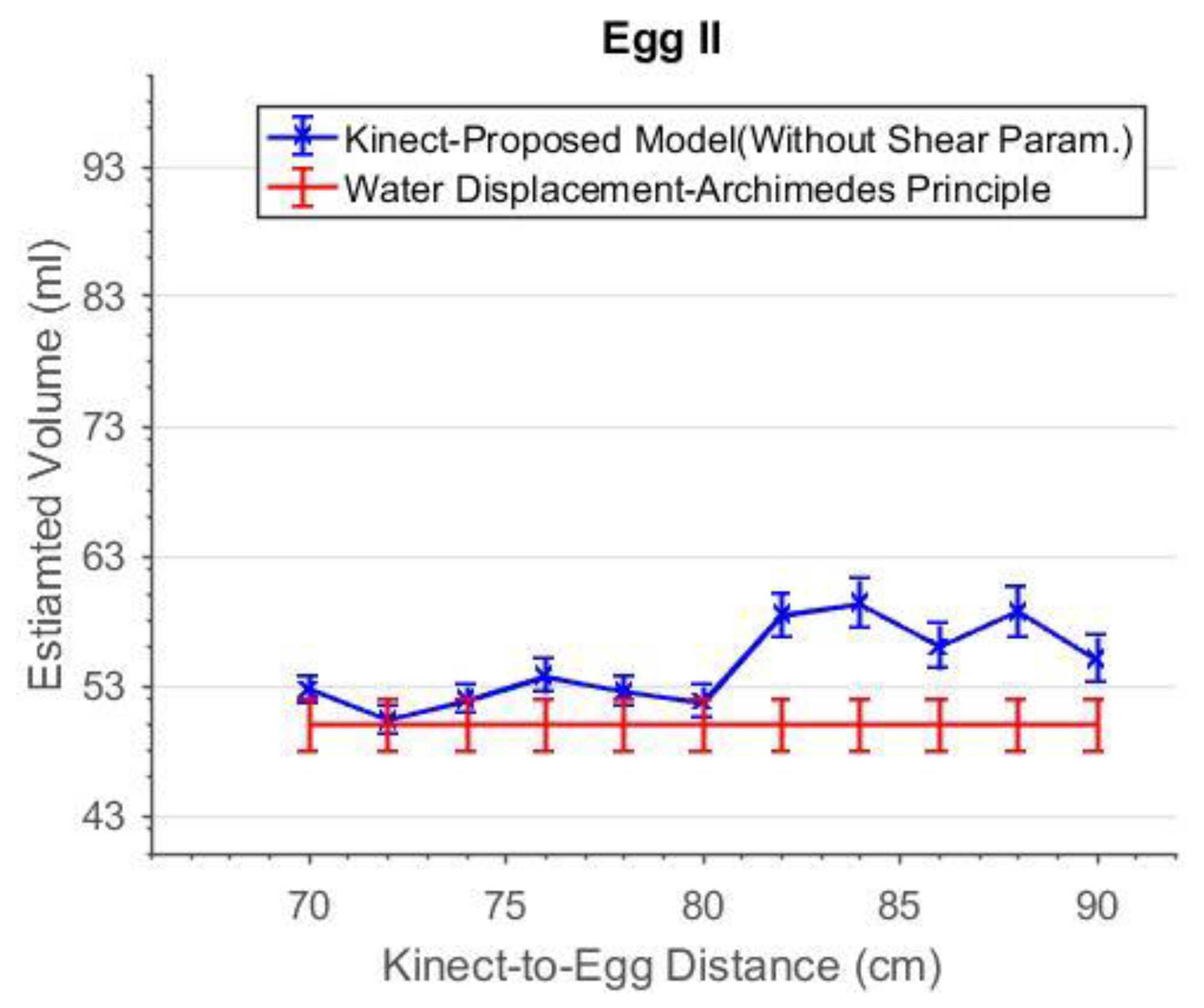
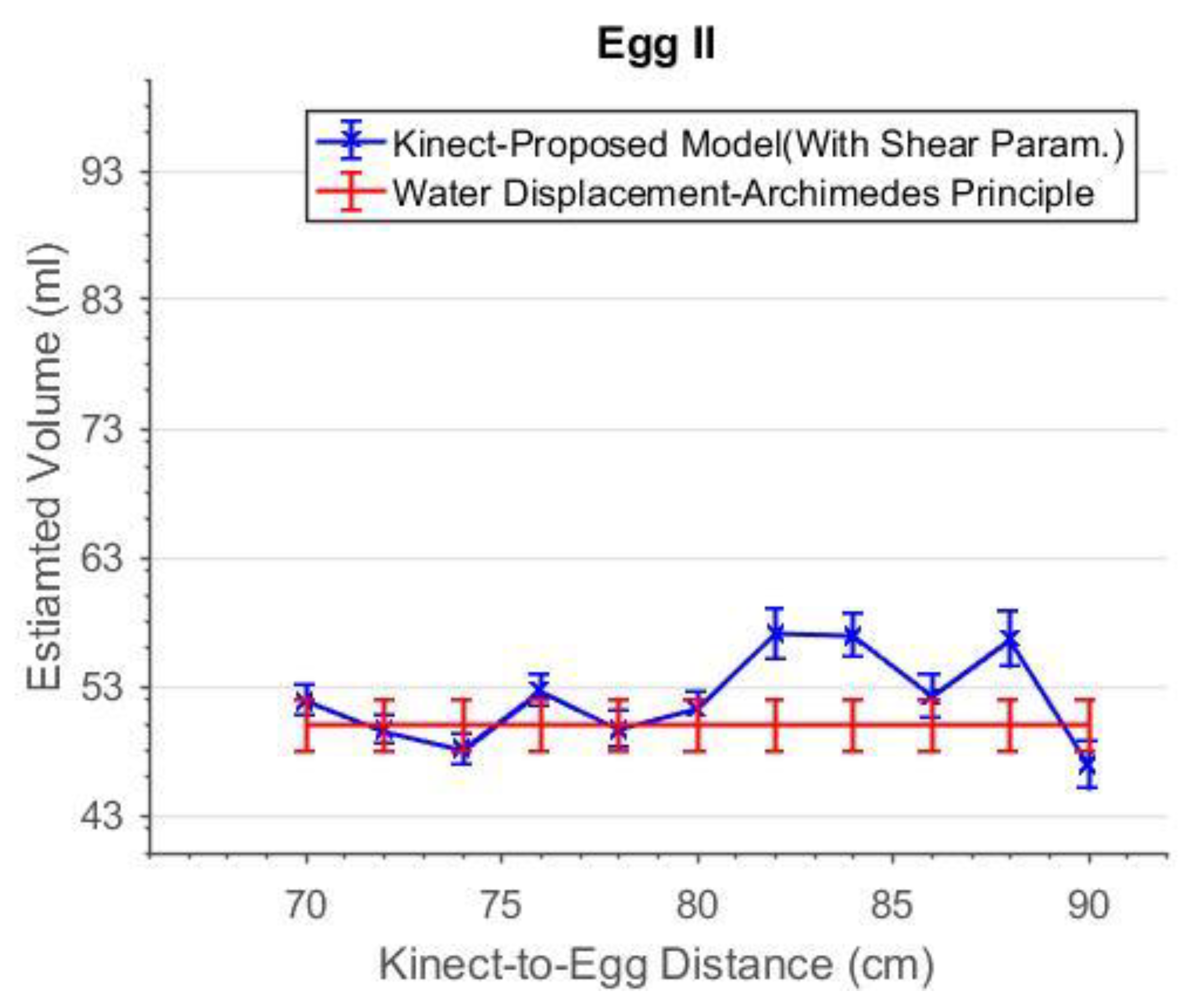
4.1. Accuracy versus Capturing Distance
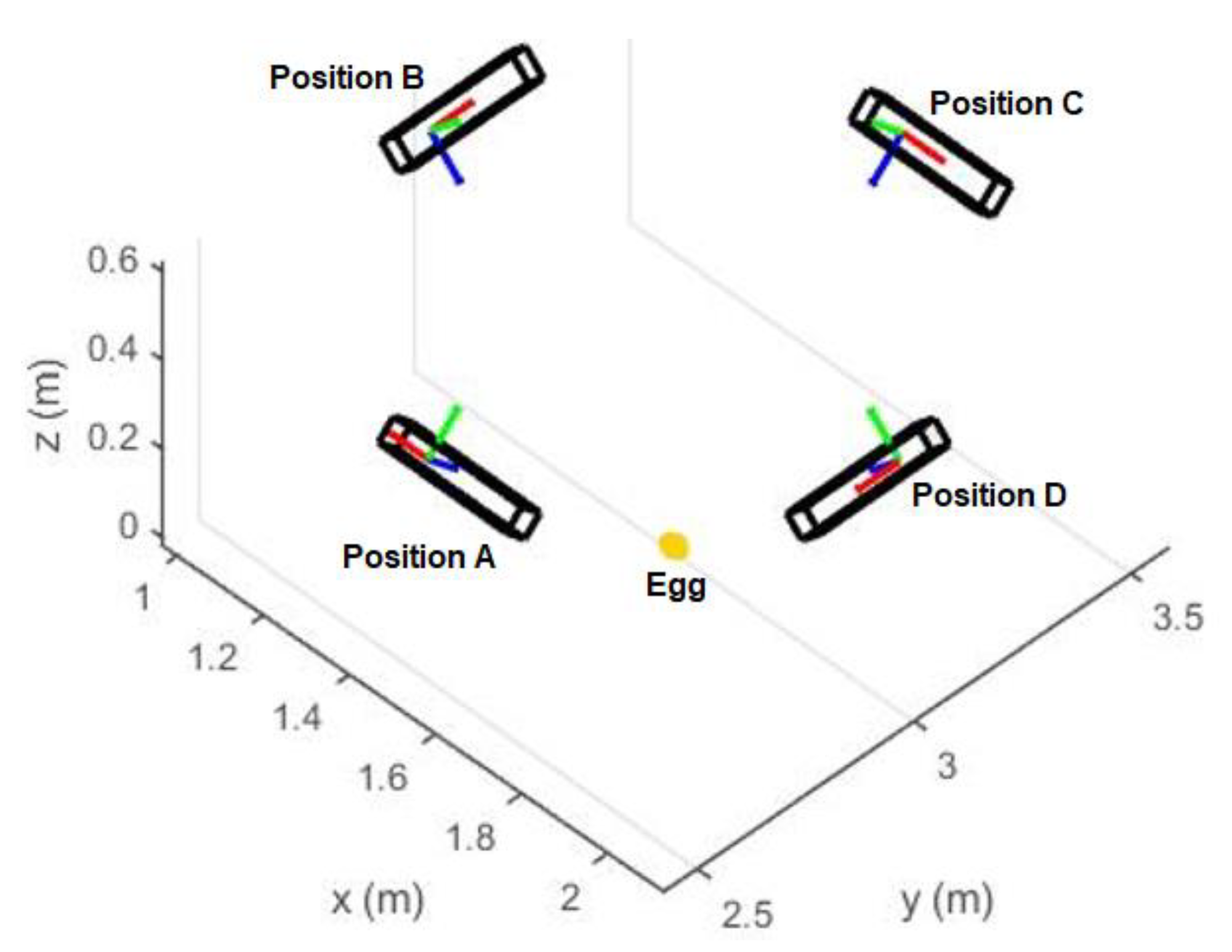
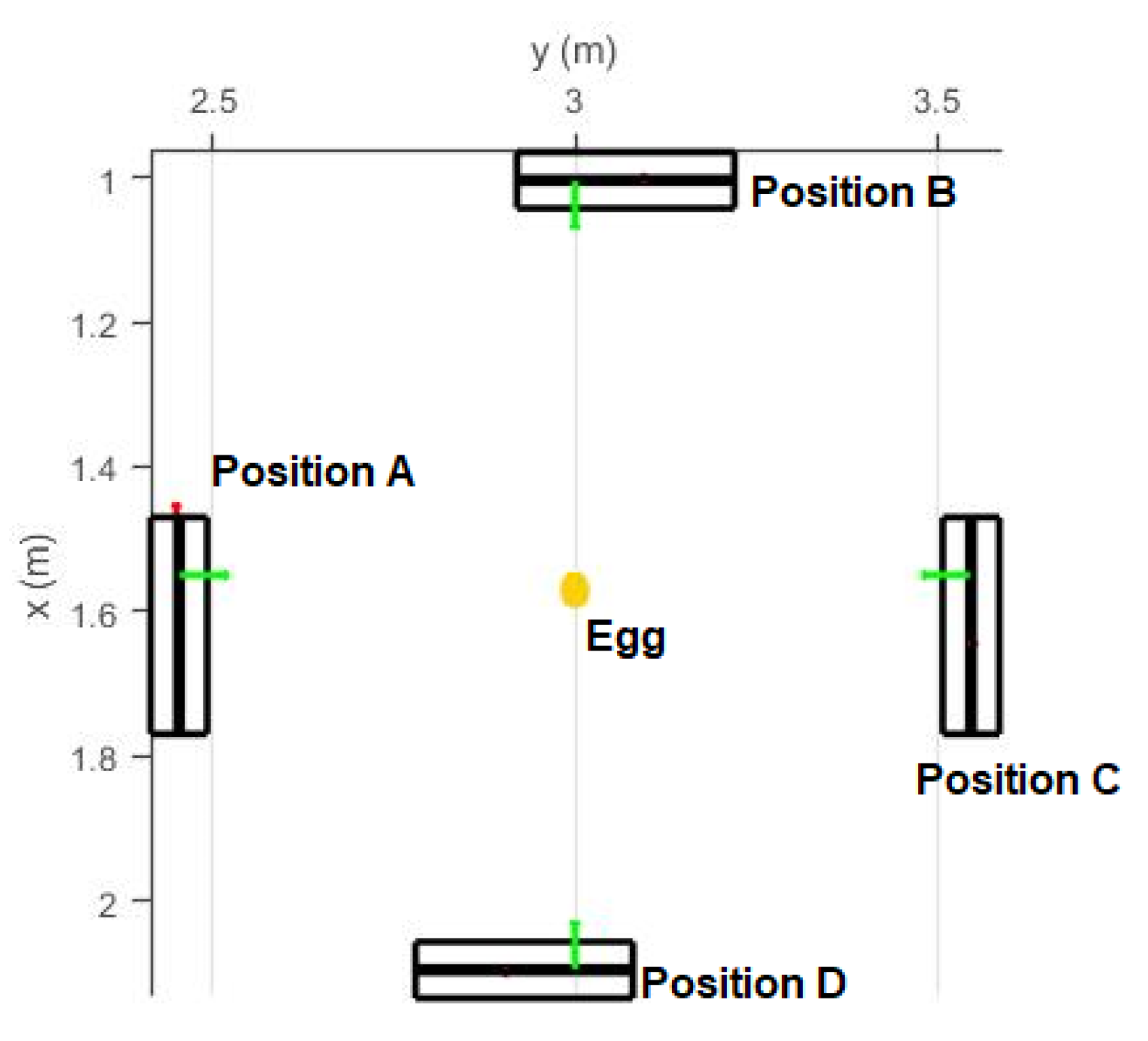
4.2. Accuracy versus Capturing Positions
4.3. Different Types of Eggs
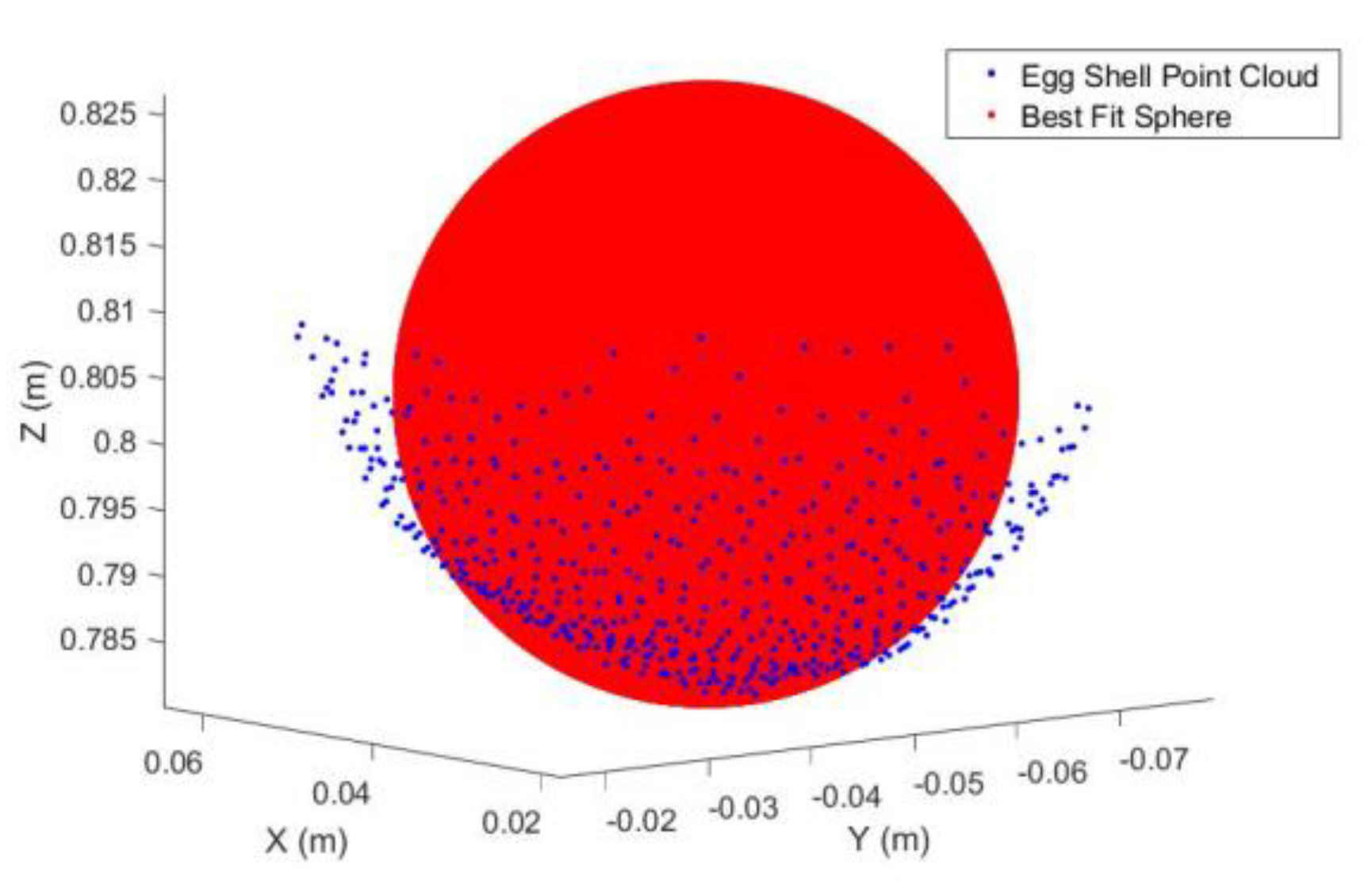
4.4. Egg Point Cloud from Laser Scanner
4.5. Final Accuracy
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Agriculture and Agri-Food Canada. Canada’s Table and Processed Egg Industry. Available online: http://www.agr.gc.ca/eng/industry-markets-and-trade/statistics-and-market-information/by-product-sector/poultry-and-eggs/poultry-and-egg-market-information/table-and-processed-eggs/?id=1384971854396 (accessed on 1 June 2018).
- Skwarska, J.; Kaliński, A.; Wawrzyniak, J.; Bańbura, M.; Glądalski, M.; Markowski, M.; Zieliński, P.; Bańbura, A.; Bańbura, J. Variation in Egg Sizes of Pied Flycatchers Ficedula hypoleuca in Central Poland: A Long-Term Decreasing Trend. Acta Ornithol. 2015, 50, 85–94. [Google Scholar] [CrossRef]
- Potti, J. Temperature during Egg Formation and the Effect of Climate Warming on Egg Size in a Small Songbird. Acta Oecol. 2008, 33, 387–393. [Google Scholar] [CrossRef]
- Järvinen, A. Global Warming and Egg Size of Birds. Ecography 1994, 17, 108–110. [Google Scholar] [CrossRef]
- De Ketelaere, B.; Bamelis, F.; Kemps, B.; Decuypere, E.; De Baerdemaeker, J. Non-destructive measurements of the egg quality. World’s Poult. Sci. J. 2004, 60, 289–302. [Google Scholar] [CrossRef]
- Morris, R.D.; Chardine, J.W. A Device for Measuring the Volume of Eggs: Description and Field Evaluation. IBIS 1985, 128, 278–282. [Google Scholar] [CrossRef]
- Bosisio, R.G. A Digital Non-Contact Microwave Instrument for Egg Size and Shape Index Measurements. IEEE Trans. Ind. Electron. Control Instrum. 1973, 174–177. [Google Scholar] [CrossRef]
- Bridge, E.S.; Boughton, R.K.; Aldredge, R.A.; Harrison, T.J.E.; Bowman, R.; Schoech, S.J. Measuring Egg Size Using Digital Photography: Testing Hoyt’s Method Using Florida Scrub-Jay Eggs. J. Field Ornithol. 2007, 78, 109–116. [Google Scholar] [CrossRef]
- Zhou, P.; Zhang, W.; Zhao, C.; Shen, C.; Sun, G. Egg Volume and Surface Area Calculations Based on Machine Vision. In Computer and Computing Technologies in Agriculture II, Proceedings the Second IFIP International Conference on Computer and Computing Technologies in Agriculture (CCTA2008), Beijing, China, 18–20 October 2008; Springer: Berlin, Germany, 2008; Volume 3, pp. 1647–1653. [Google Scholar]
- Narushin, V.G. Egg Geometry Calculation Using the Measurements of Length and Breadth. Poult. Sci. 2005, 84, 482–484. [Google Scholar] [CrossRef] [PubMed]
- Troscianko, J. A Simple Tool for Calculating Egg Shape, Volume and Surface Area from Digital Images. IBIS 2014, 156, 874–878. [Google Scholar] [CrossRef]
- Zalhan, M.Z.; Syarmila, S.S.; Nazri, I.M.; Taha, I.M. Vision-based Egg Grade Classifier. In Proceedings of the International Conference on Information and Communication Technology (ICICTM), Kuala Lumpur, Malaysia, 16–17 May 2016; pp. 31–35. [Google Scholar]
- Waranusast, R.; Intayod, P.; Makhod, D. Egg size classification on Android mobile devices using image processing and machine learning. In Proceedings of the Fifth ICT International Student Project Conference (ICT-ISPC), Nakhon Pathom, Thailand, 27–28 May 2016; pp. 170–173. [Google Scholar]
- Zhang, W.; Wu, X.; Qiu, Z.; He, Y. A Novel Method for Measuring the Volume and Surface Area of Egg. J. Food Eng. 2016, 170, 160–169. [Google Scholar] [CrossRef]
- Edelsbrunner, H. Alpha Shapes—A Survey. Tessellations Sci. 2010, 27, 1–25. [Google Scholar]
- Microsoft, 2017. Meet Kinect for Windows. Available online: https://developer.microsoft.com/en-us/windows/kinect (accessed on 1 June 2018).
- Sarbolandi, H.; Lefloch, D.; Kolb, A. Kinect Range Sensing: Structured-light Versus Time-of-Flight Kinect. Comput. Vis. Image Underst. 2015, 139, 1–20. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, L.; Dong, H.; Alelaiwi, A.; Saddik, A.E. Evaluating and Improving the Depth Accuracy of Kinect for Windows v2. IEEE Sens. J. 2015, 15, 4275–4285. [Google Scholar] [CrossRef]
- Otte, K.; Kayser, B.; Mansow-Model, S.; Verrel, J.; Paul, F.; Brandt, A.U.; Schmitz-Hübsch, T. Accuracy and Reliability of the Kinect Version 2 for Clinical Measurement of Motor Function. PLoS ONE 2016, 11, e0166532. [Google Scholar] [CrossRef] [PubMed]
- Pöhlmann, S.T.L.; Harkness, E.F.; Taylor, C.J.; Astley, S.M. Evaluation of Kinect 3D Sensor for Healthcare Imaging. J. Med. Biol. Eng. 2016, 36, 857–870. [Google Scholar] [CrossRef] [PubMed]
- Dehbandi, B.; Barachant, A.; Smeragliuolo, A.H.; Long, J.D.; Bumanlag, S.J.; He, V.; Lampe, A.; Putrino, D. Using Data from the Microsoft Kinect 2 to Determine Postural Stability in Healthy Subjects: A Feasibility Trial. PLoS ONE 2017, 12, e0170890. [Google Scholar] [CrossRef] [PubMed]
- Wasenmüller, O.; Stricker, D. Comparison of Kinect V1 and V2 Depth Images in Terms of Accuracy and Precision. Lect. Notes Comput. Sci. 2017, 10117, 34–45. [Google Scholar]
- Lahamy, H.; Lichti, D.D.; Steward, J.; El-Badry, M.; Moravvej, M. Measurement of Deflection in Concrete Beams During Fatigue Loading Test Using the Microsoft Kinect 2.0. J. Appl. Geodesy 2016, 10. [Google Scholar] [CrossRef]
- Fankhauser, P.; Bloesch, M.; Rodriguez, D.; Kaestner, R.; Hutter, M.; Siegwart, R. Kinect V2 for Mobile Robot Navigation: Evaluation and Modeling. In Proceedings of the International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 388–394. [Google Scholar]
- Köller, J. Egg Curves and Ovals. Available online: http://www.mathematische-basteleien.de/eggcurves.htm (accessed on 1 June 2018).
- Yamamoto, N. TDCC Laboratory. Available online: http://www.geocities.jp/nyjp07/index_egg_E.html (accessed on 1 June 2018).
- Chan, T.O.; Lichti, D.D.; Belton, D. A Rigorous Cylinder-based Self-calibration Approach for Terrestrial Laser Scanners. ISPRS J. Photogram. Remote Sens. 2015, 99, 84–99. [Google Scholar] [CrossRef]
- Corti, A.; Giancola, S.; Mainetti, G.; Sala, R. A Metrological Characterization of the Kinect V2 Time-of-Flight Camera. Robot. Auton. Syst. 2016, 75, 584–594. [Google Scholar] [CrossRef]
- Pagliari, D.; Pinto, L. Calibration of Kinect for Xbox One and Comparison between the Two Generations of Microsoft Sensors. Sensors 2015, 15, 27569–27589. [Google Scholar] [CrossRef] [PubMed]
- Steward, J.; Lichti, D.; Chow, J.; Ferber, R.; Osis, S. Performance Assessment and Calibration of the Kinect 2.0 Time-of-Flight Range Camera for use in Motion Capture Applications. In Proceedings of the Wisdom of the Ages to the Challenges of the Modern World, Sofia, Bulgaria, 17–21 May 2015. [Google Scholar]
- Lachat, E.; Macher, H.; Landes, T.; Grussenmeyer, P. Assessment and Calibration of a RGB-D Camera (Kinect V2 Sensor) Towards a Potential Use for Close-Range 3D Modeling. Remote Sens. 2015, 7, 13070–13097. [Google Scholar] [CrossRef]
- Prince, S.J.D. Computer Vision: Models, Learning, and Inference; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Förstner, W.; Wrobel, B. Mathematical Concepts in Photogrammetry. In Manual of Photogrammetry, 5th ed.; McGlone, J.C., Mikhail, E.M., Bethel, J., Mullen, R., Eds.; American Society of Photogrammetry and Remote Sensing: Bethesda, MA, USA, 2004; pp. 15–180. [Google Scholar]
- Kuang, S. Geodetic Network Analysis and Optimal Design: Concepts and Applications; Ann Arbor Press: Chelsa, MI, USA, 1996. [Google Scholar]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Garcia, D. Robust Smoothing of Gridded Data in One and Higher Dimensions with Missing Values. Comput. Stat. Data Anal. 2010, 54, 1167–1178. [Google Scholar] [CrossRef] [PubMed]
- Forsythe, G.E.; Malcolm, M.A.; Moler, C.B. Computer Methods for Mathematical Computations; Prentice-Hall Series in Automatic Computation; Prentice-Hall: Upper Saddle River, NJ, USA, 1977. [Google Scholar]
- Chan, T.O.; Lichti, D.D.; Belton, D.; Klingseisen, B.; Helmholz, P. Survey Accuracy Analysis of a Hand-held Mobile LiDAR Device for Cultural Heritage Documentation. Photogram. Fernerkund. Geoinform. 2016, 153–165, 153–165. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Egg Label | Egg Type | Approximate Dimensions L (cm) × r (cm) | Experiment Description | Estimated Results |
|---|---|---|---|---|
| I | Chicken | 6 × 2 | Different Kinect-to-Egg Distances | Section 4.1 |
| II | Chicken | 5.5 × 1.75 | ||
| III | Chicken | 6 × 2 | Different Kinect Position | Section 4.2 |
| IV | Chicken | 5.5 × 2 | ||
| V | Duck | 7 × 2.25 | Different Bird Eggs | Section 4.3 |
| VI | Quail | 3 × 1 | ||
| VII | Chicken | 6 × 2 | With Laser Scanner | Section 4.4 |
| VIII | Chicken | 5.5 × 1.75 |
| Capturing Position | Without Shear Param. | With Shear Param. | Ref. Vol. (mL) | ||
|---|---|---|---|---|---|
| Vol. (mL) | Est. Egg Shape Param. |a|, |b| (cm) | Vol. (mL) | Est. Egg Shape Param. |a|, |b| (cm) | ||
| A | 68.69 ± 2.65 | 6.50 ± 0.15 5.04 ± 0.51 | 67.24 ± 9.54 | 6.17 ± 0.28 3.84 ± 0.82 | 66 ± 2.0 |
| B | 54.70 ± 1.86 | 5.70 ± 0.11 3.37 ± 0.32 | No Solutions | No Solutions | |
| C | 63.72 ± 1.80 | 6.14 ± 0.06 4.09 ± 0.24 | 66.66 ± 4.08 | 6.07 ± 0.13 3.54 ± 0.29 | |
| D | 54.03 ± 2.12 | 5.45 ± 0.18 5.78 ± 0.68 | No Solutions | No Solutions | |
| Capturing Positon | Without Shear Param. | With Shear Param. | Ref. Vol. (mL) | ||
|---|---|---|---|---|---|
| Vol. (mL) | Est. Egg Shape Param. |a|, |b| (cm) | Vol. (mL) | Est. Egg Shape Param. |a|, |b| (cm) | ||
| A | 55.04 ± 2.30 | 5.68 ± 0.07 3.24 ± 0.24 | 53.25 ± 6.62 | 5.63 ± 0.26 3.29 ± 0.43 | 51 ± 2.0 |
| B | 45.44 ± 2.28 | 5.16 ± 0.80 2.41 ± 0.25 | No Solutions | No Solutions | |
| C | 54.11 ± 3.62 | 5.57 ± 0.08 2.91 ± 0.27 | 52.31 ± 6.47 | 5.70 ± 0.25 3.62 ± 0.45 | |
| D | 42.58 ± 3.62 | 5.41 ± 0.14 3.75 ± 0.46 | No Solutions | No Solutions | |
| Egg Type | Vol. (mL) | Est. Egg Shape Param. |a|, |b| (cm) | Ref. Vol. (mL) |
|---|---|---|---|
| Duck Egg (Egg V) | 74.85 ± 2.12 | 6.76 ± 0.05 5.49 ± 0.23 | 74 ± 2.0 |
| Quail Egg (Egg VI) | 11.78 ± 1.74 | 3.23 ± 0.18 1.33 ± 0.32 | 11 ± 2.0 |
| Capturing Position | Kinect | Faro Focus3D | Ref. Vol. (mL) | ||
|---|---|---|---|---|---|
| Vol. (mL) | Est. Egg Shape Param. |a|, |b| (cm) | Vol. (mL) | Est. Egg Shape Param. |a|, |b| (cm) | ||
| VII | 64.96 ± 2.86 | 6.18 ± 0.18 4.14 ± 0.34 | 65.74 ± 4.08 | 6.44 ± 0.23 5.15 ± 0.51 | 66 ± 2.0 |
| VIII | 50.31 ± 1.78 | 5.84 ± 0.06 4.49 ± 0.24 | 48.56 ± 3.07 | 5.55 ± 0.12 3.51 ± 0.62 | 51 ± 2.0 |
| Egg Label | With Shear Param. | Est Vol. (mL) | Ref. Vol. (mL) | Accuracy (%) |
|---|---|---|---|---|
| I | Yes | 73.07 ± 2.25 | 73 ± 2 | 93.92 |
| II | Yes | 50.02 ± 2.48 | 50 ± 2 | 95.00 |
| III | Yes | 66.66 ± 4.08 | 66 ± 2 | 92.82 |
| IV | Yes | 52.31 ± 6.47 | 51 ± 2 | 84.75 |
| VII | No | 64.96 ± 2.86 | 66 ± 2 | 95.44 |
| VIII | No | 50.31 ± 1.78 | 51 ± 2 | 97.86 |
| Mean | 93.30 | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chan, T.O.; Lichti, D.D.; Jahraus, A.; Esfandiari, H.; Lahamy, H.; Steward, J.; Glanzer, M. An Egg Volume Measurement System Based on the Microsoft Kinect. Sensors 2018, 18, 2454. https://doi.org/10.3390/s18082454
Chan TO, Lichti DD, Jahraus A, Esfandiari H, Lahamy H, Steward J, Glanzer M. An Egg Volume Measurement System Based on the Microsoft Kinect. Sensors. 2018; 18(8):2454. https://doi.org/10.3390/s18082454
Chicago/Turabian StyleChan, Ting On, Derek D. Lichti, Adam Jahraus, Hooman Esfandiari, Herve Lahamy, Jeremy Steward, and Matthew Glanzer. 2018. "An Egg Volume Measurement System Based on the Microsoft Kinect" Sensors 18, no. 8: 2454. https://doi.org/10.3390/s18082454
APA StyleChan, T. O., Lichti, D. D., Jahraus, A., Esfandiari, H., Lahamy, H., Steward, J., & Glanzer, M. (2018). An Egg Volume Measurement System Based on the Microsoft Kinect. Sensors, 18(8), 2454. https://doi.org/10.3390/s18082454