A Review on Systems-Based Sensory Gloves for Sign Language Recognition State of the Art between 2007 and 2017

 ,
,
Abstract
1. Introduction
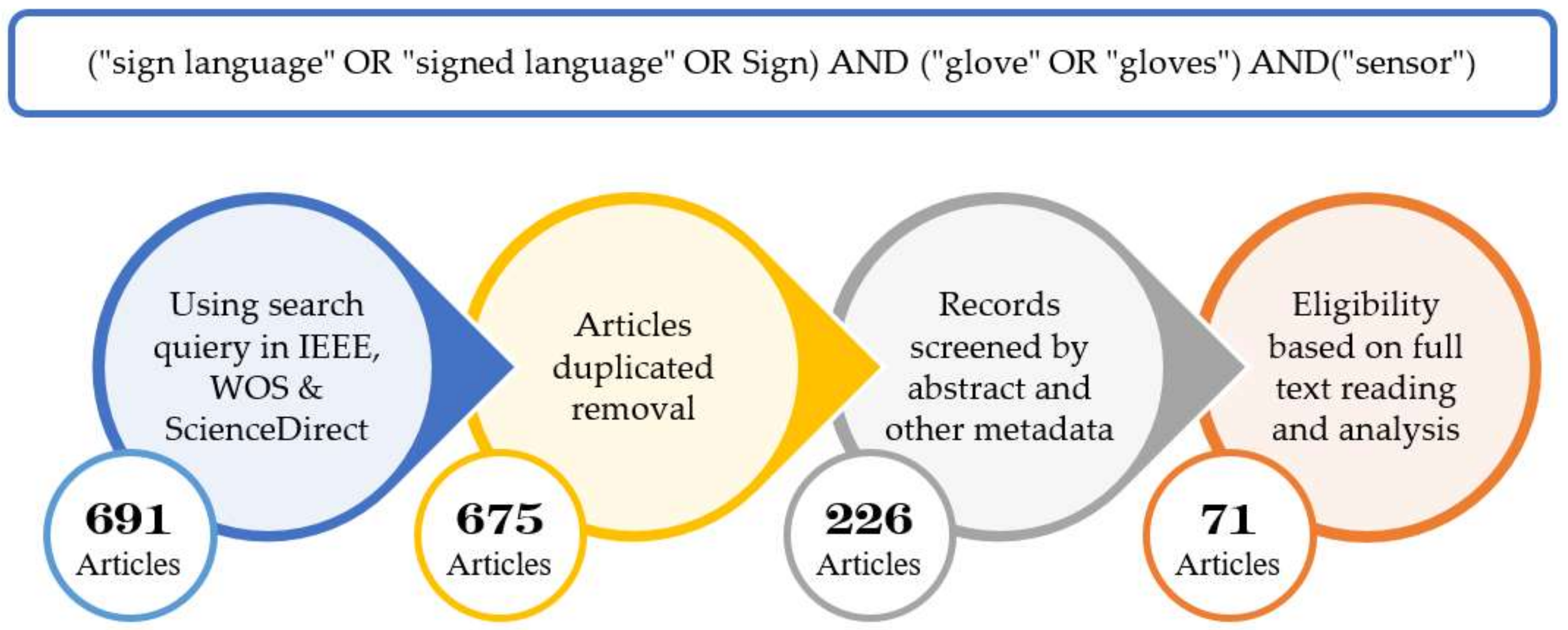
2. Materials and Methods
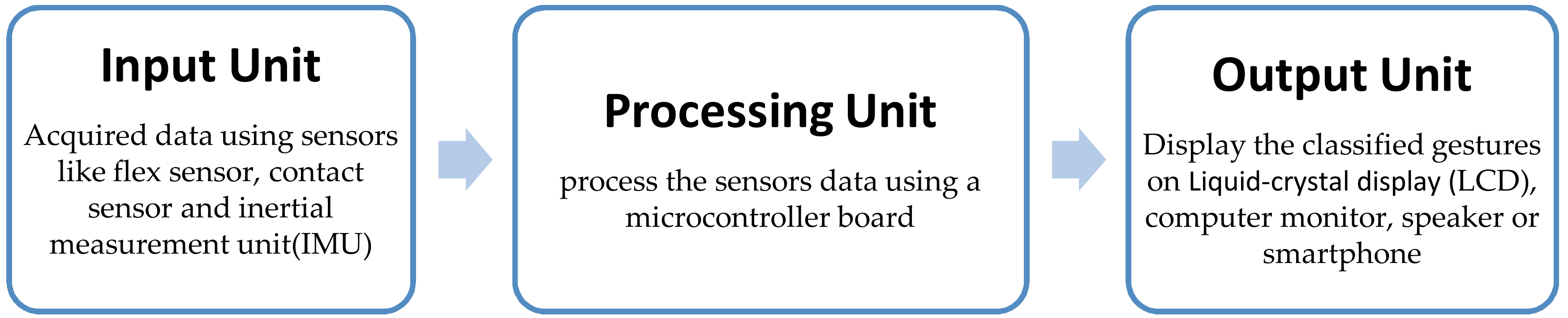
2.1. Pertaining to System Materials
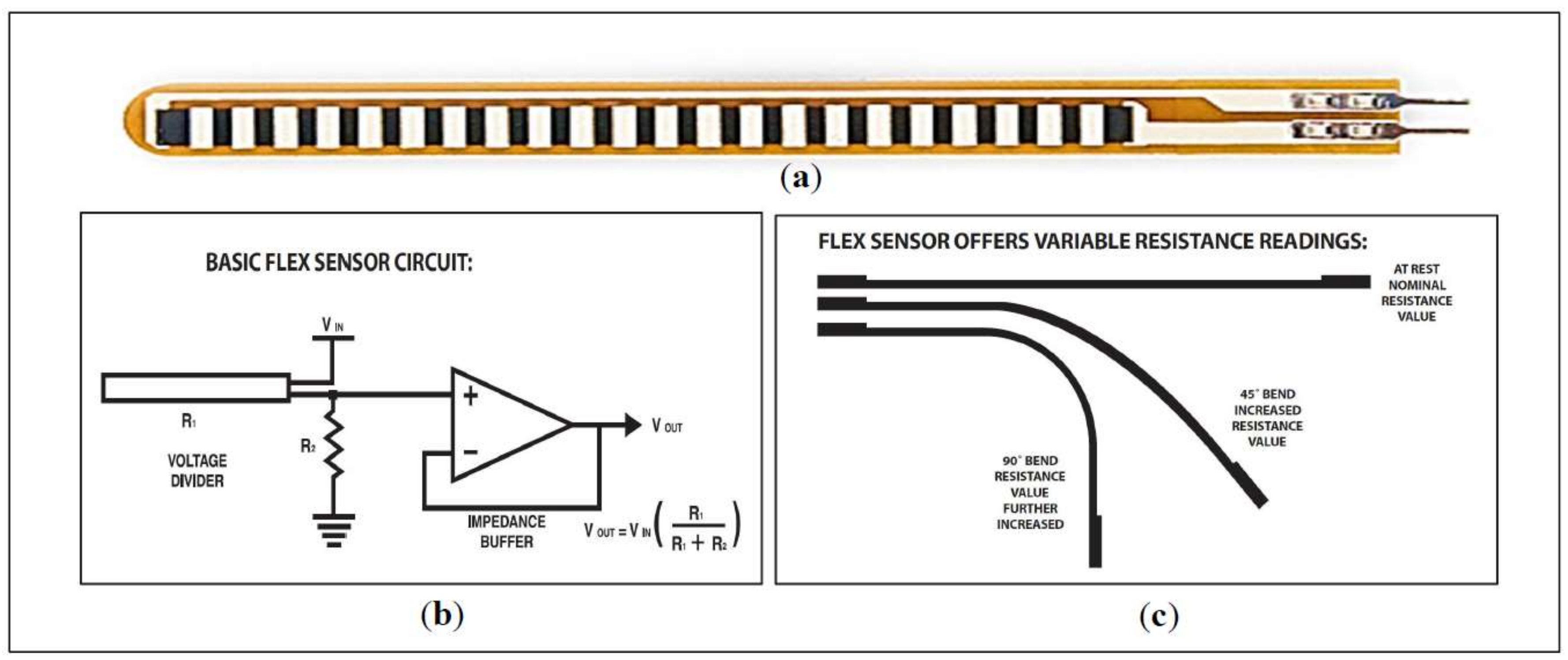
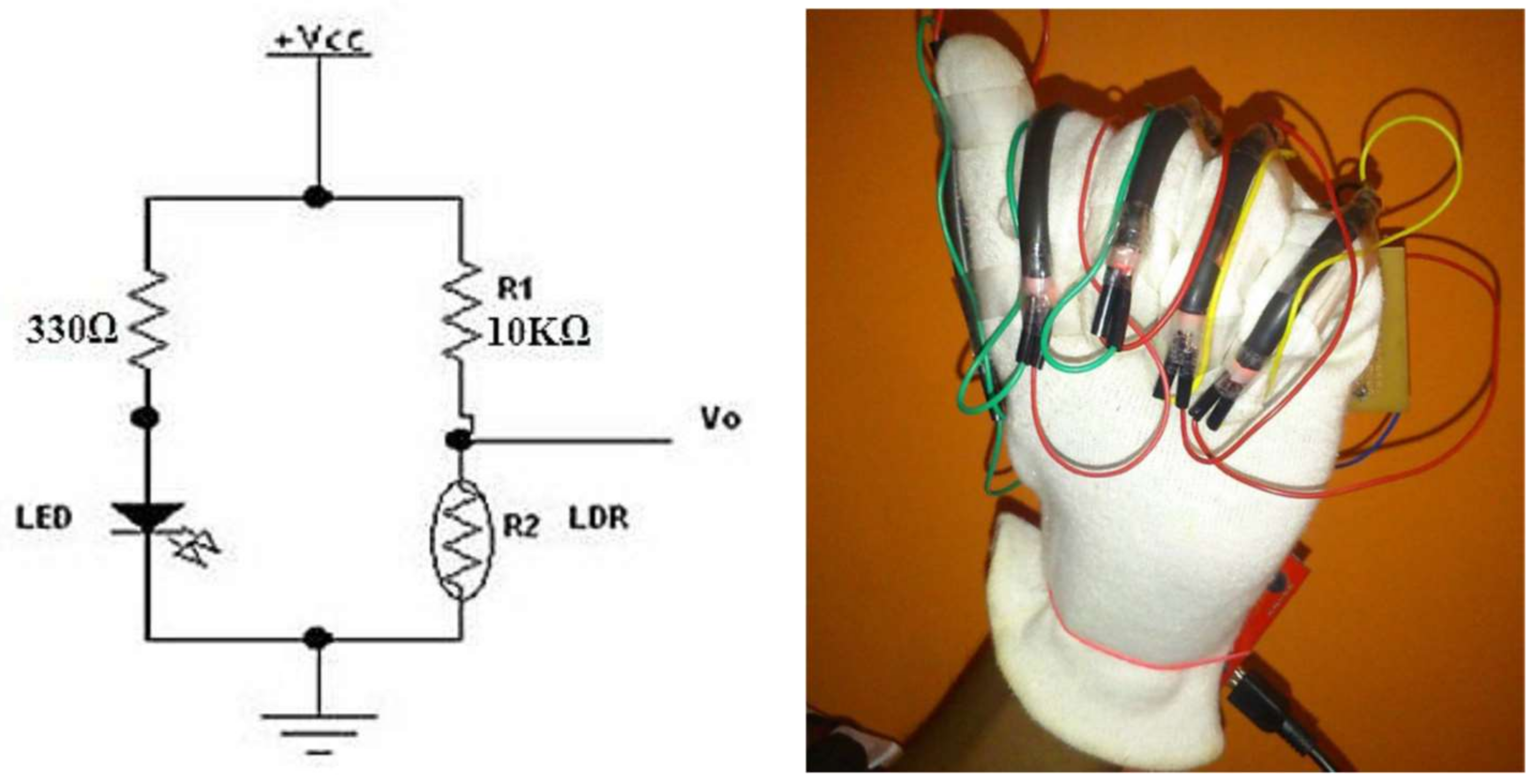
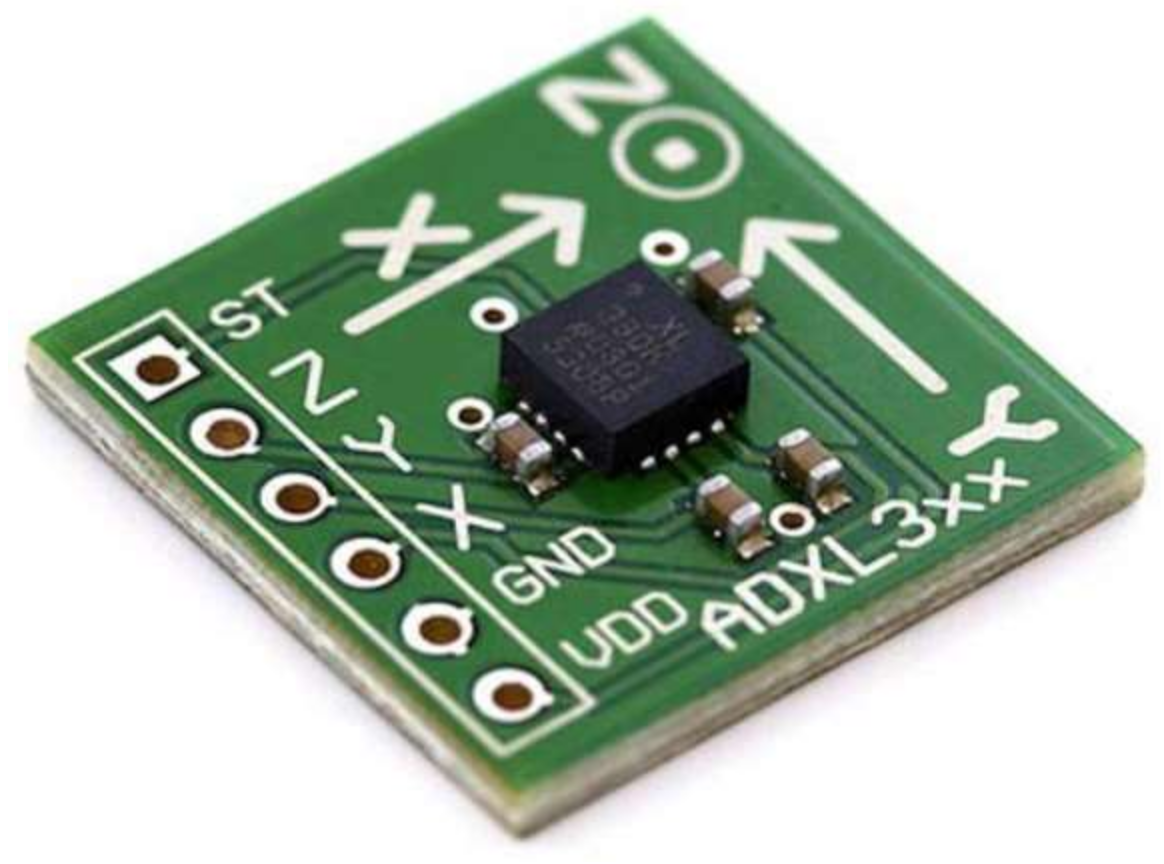
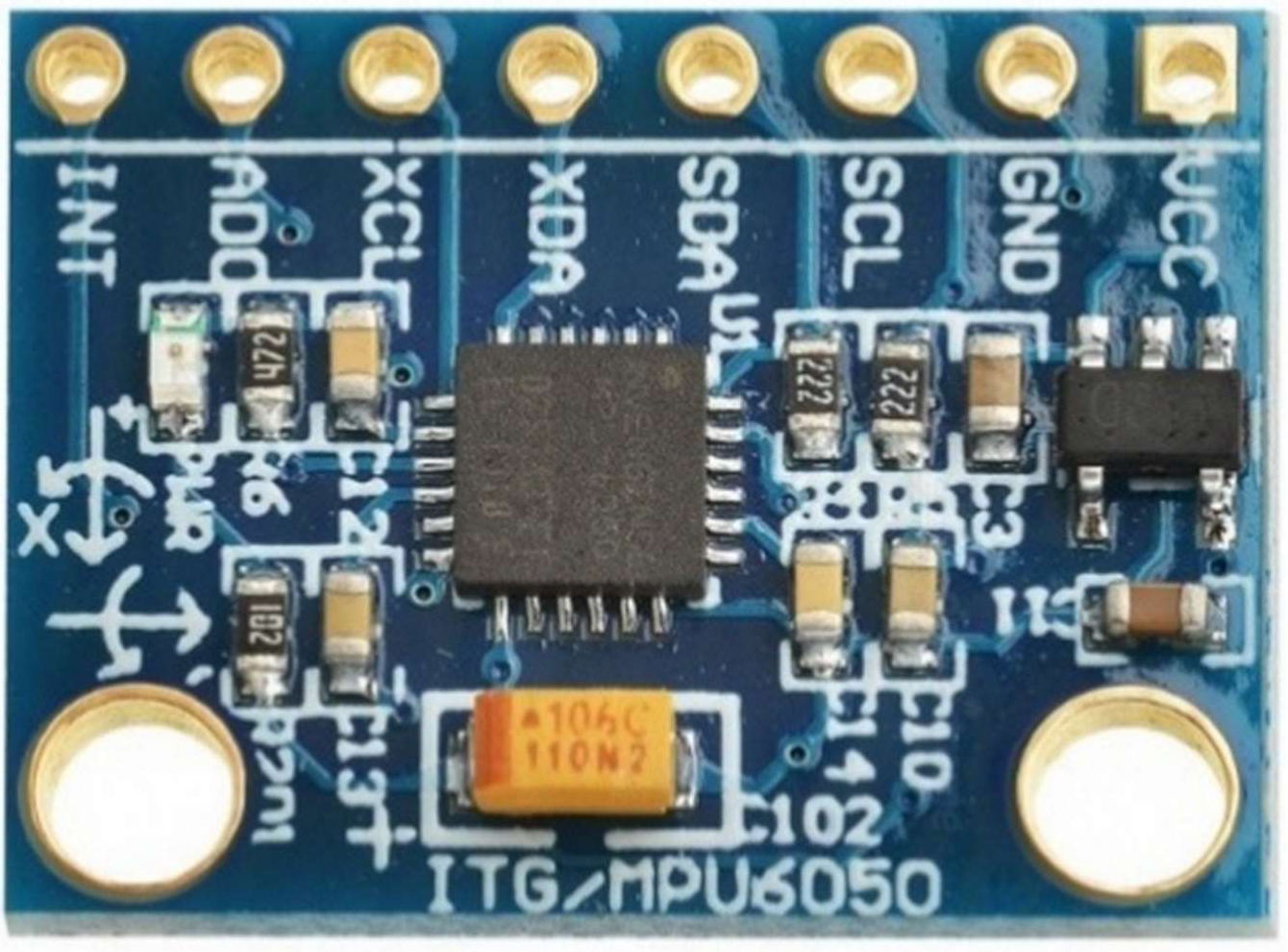
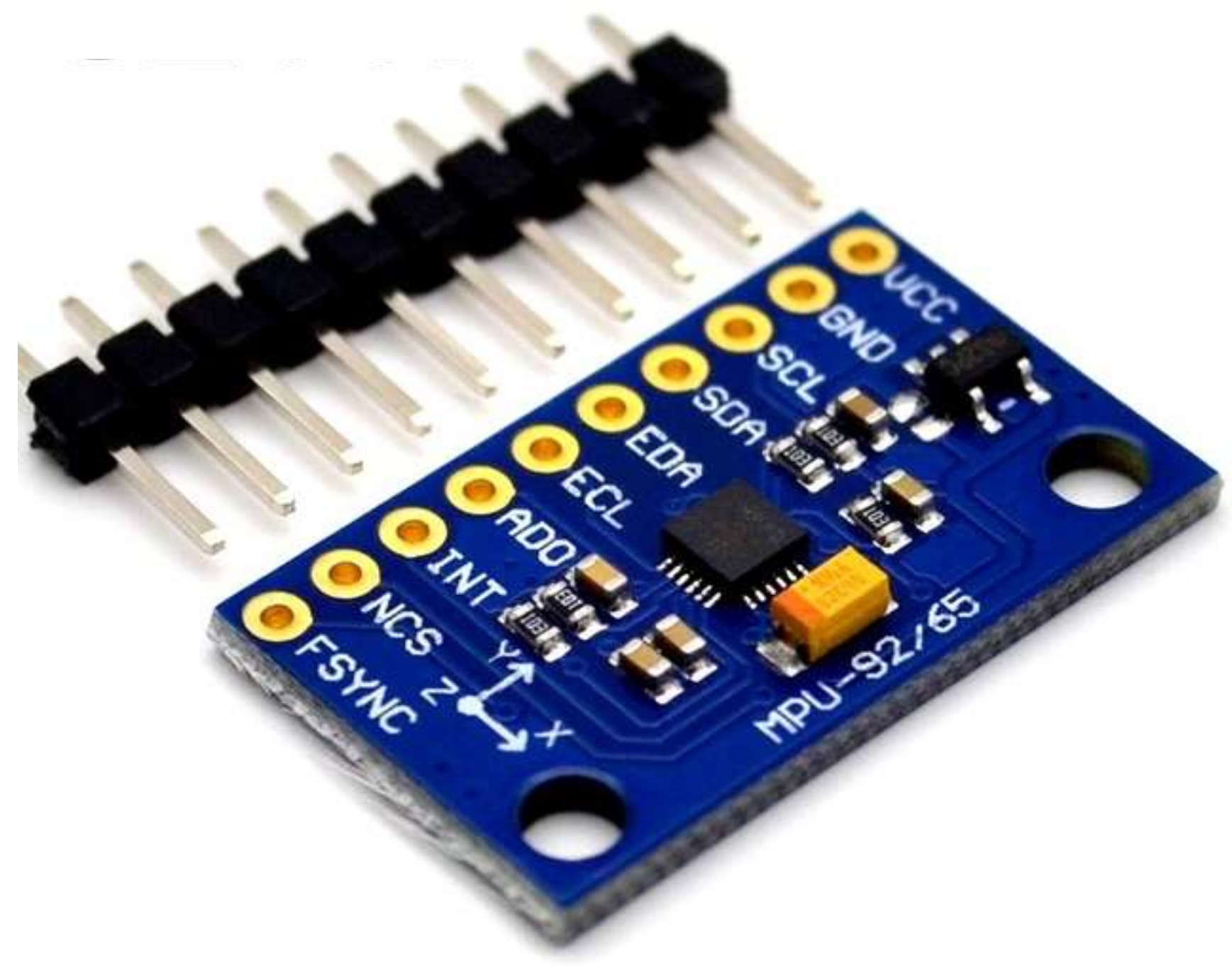
2.1.1. Input Unit
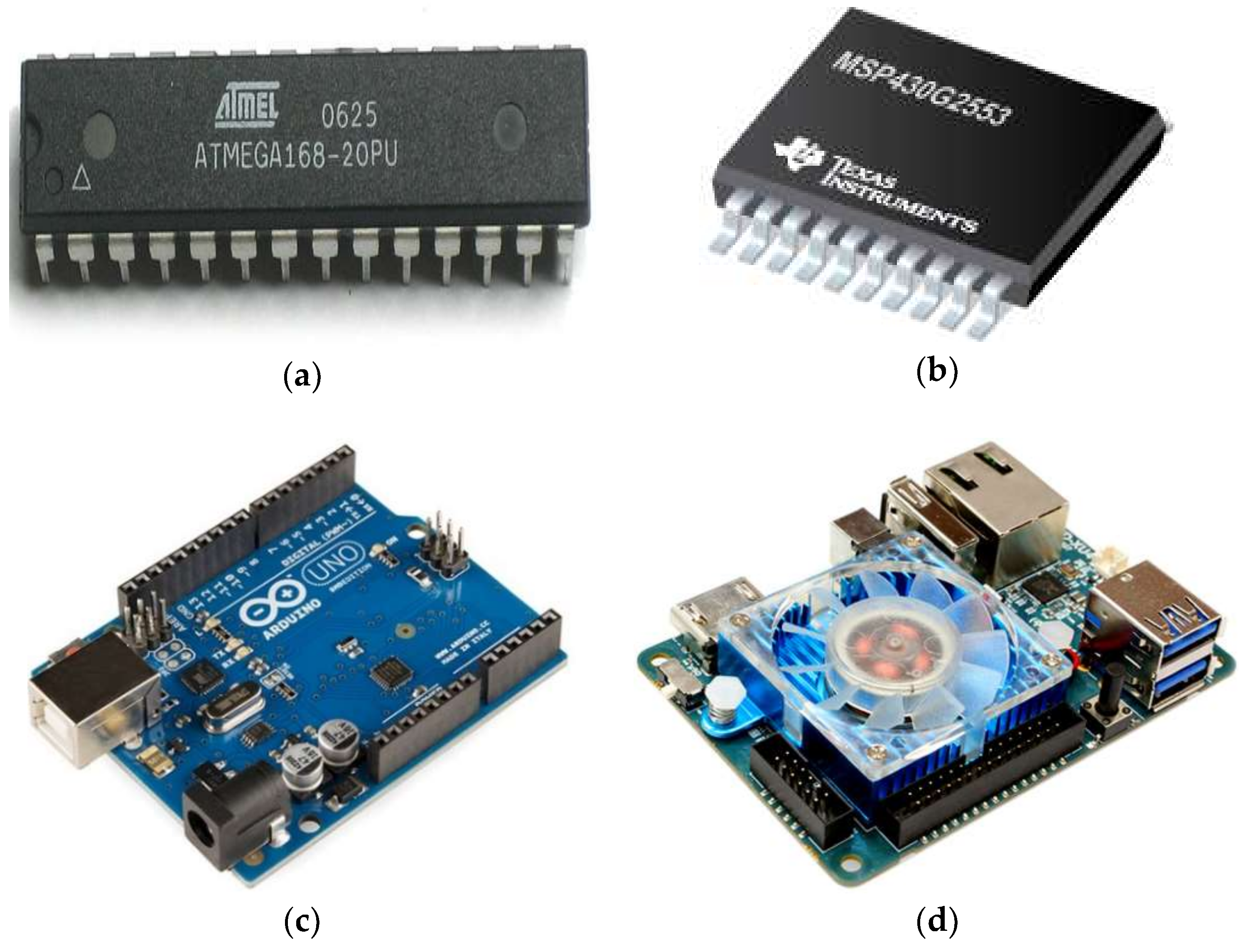
2.1.2. Processing Unit
2.1.3. Output Unit
2.2. Gesture Learning Methods
2.3. Training Datasets
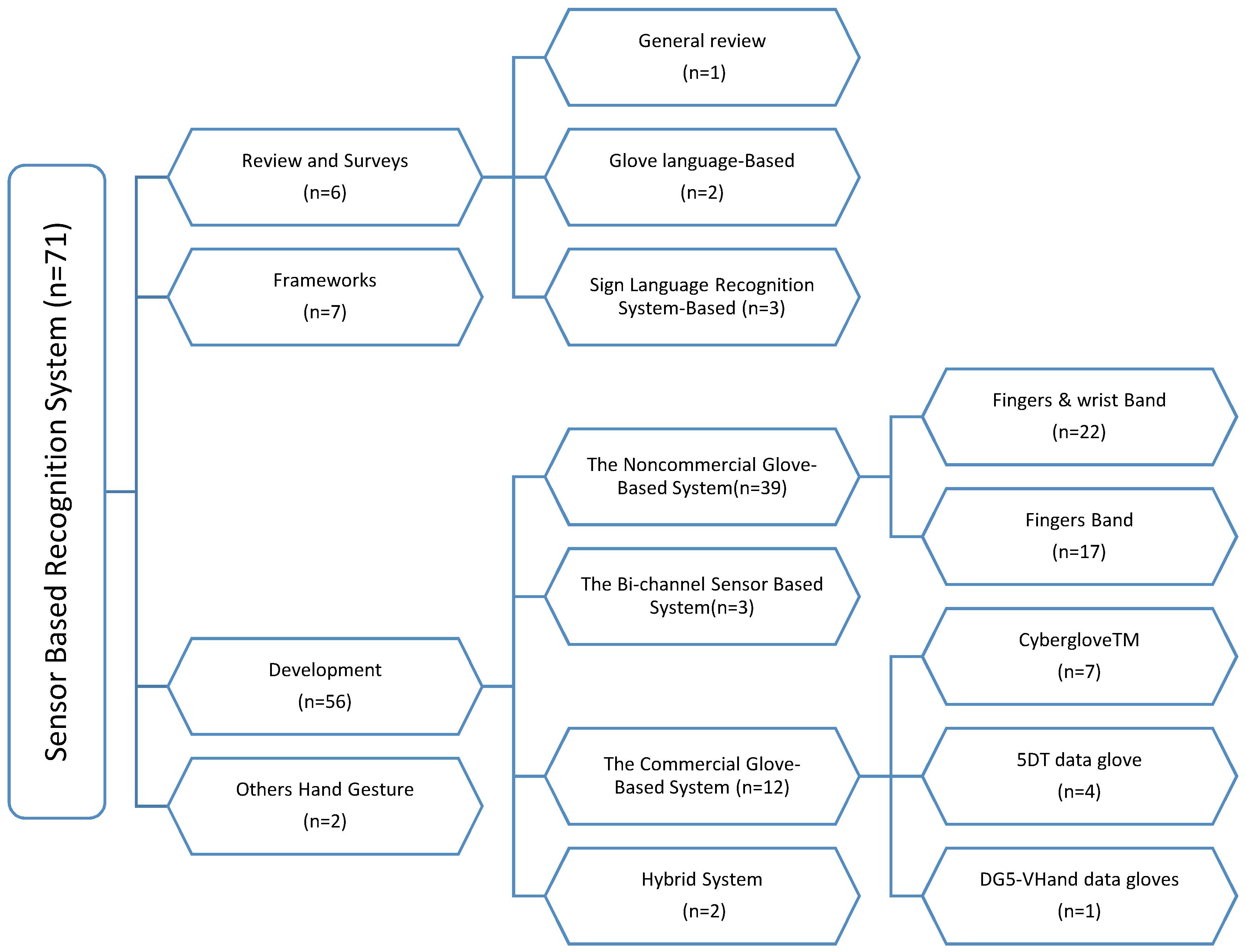
3. The Analysis Results
3.1. Review and Survey Articles
3.2. Development System for SL
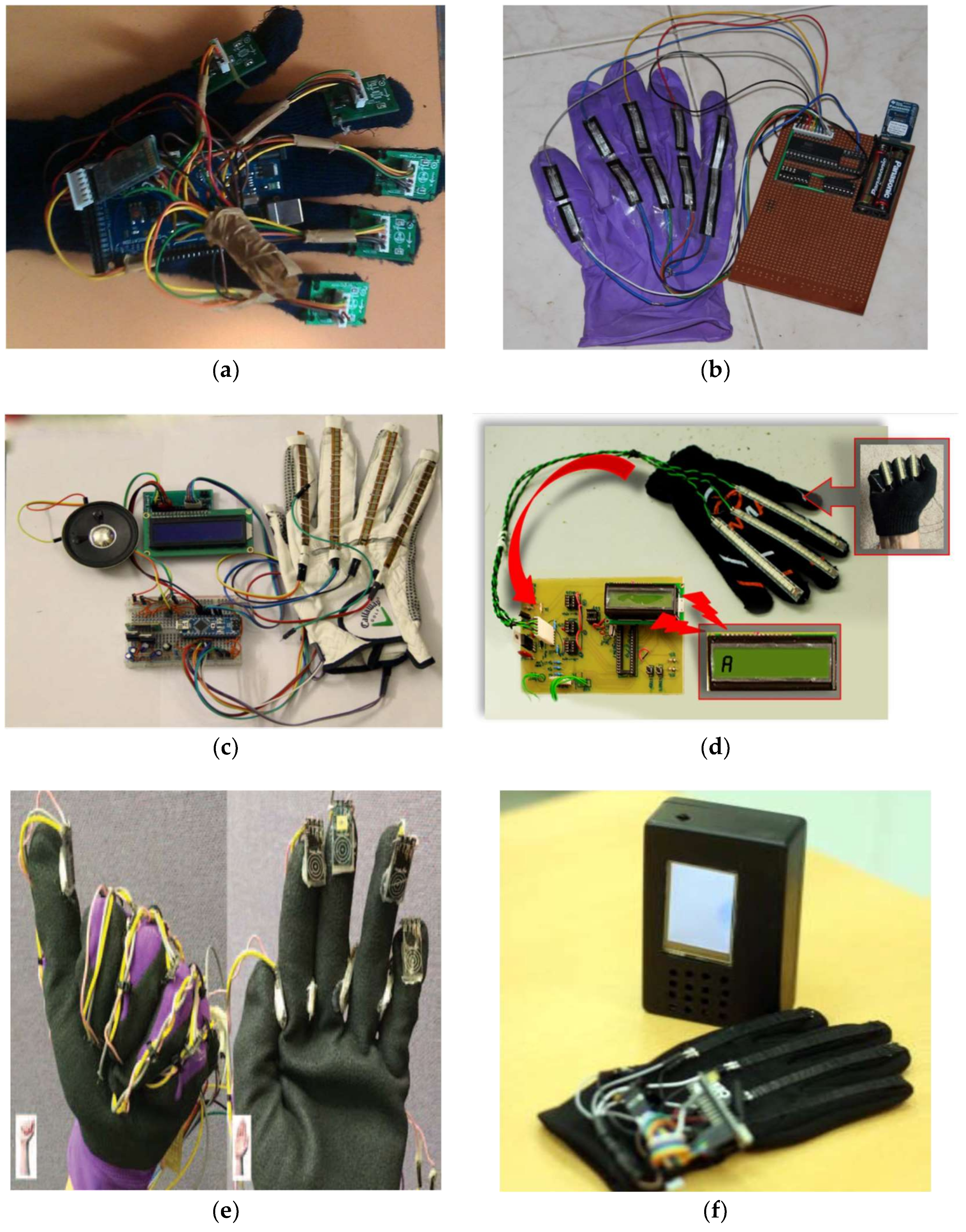
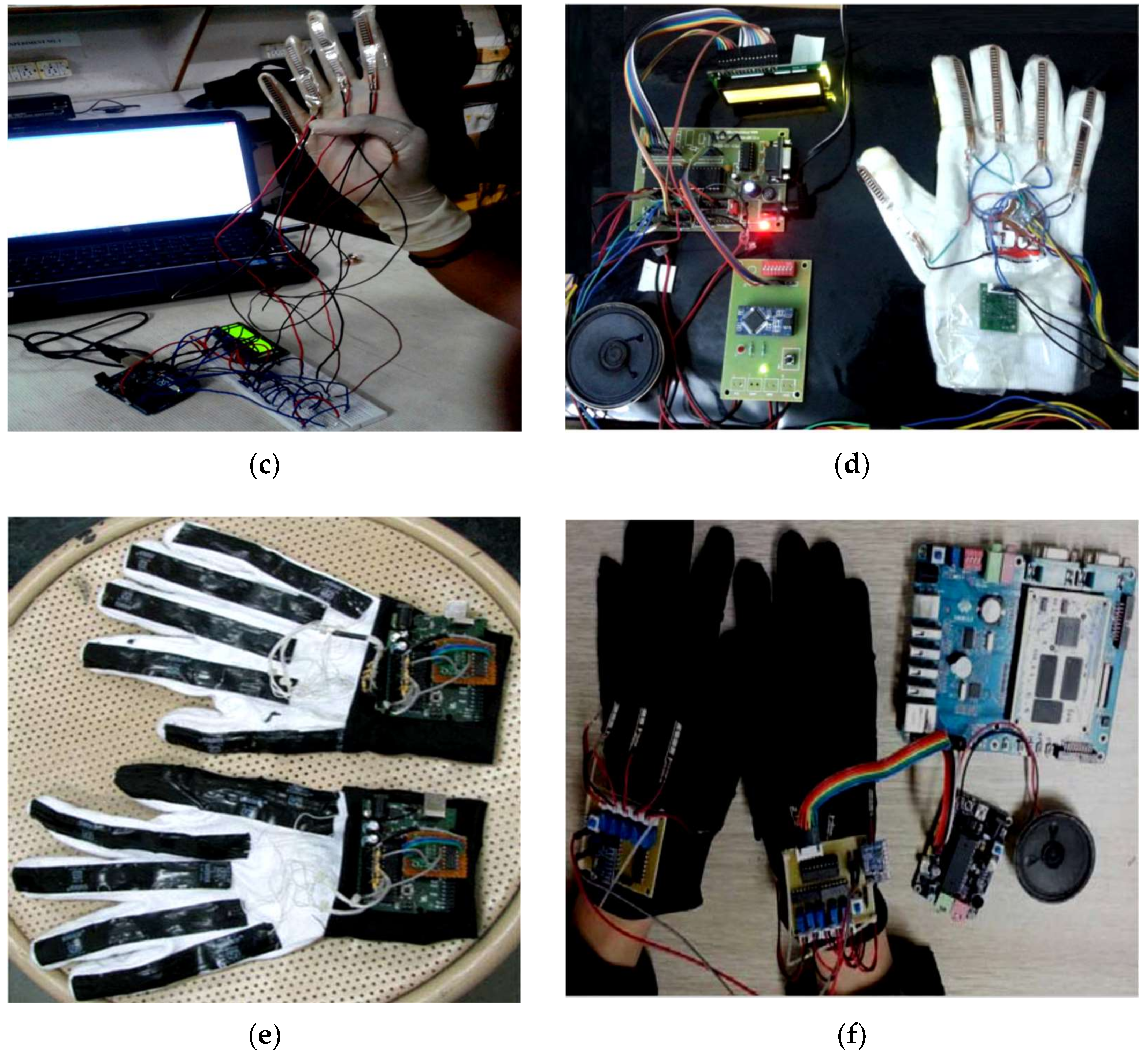
3.2.1. Non-Commercial Glove-Based System
3.2.2. Commercial Glove-Based System
3.2.3. Bi-Channel Sensor-Based System
3.2.4. Hybrid System for SLR
3.3. Frameworks for SLR
3.4. Other Hand Gesture Recognition
4. Distribution Results
4.1. Distribution by Sign Language Nationality
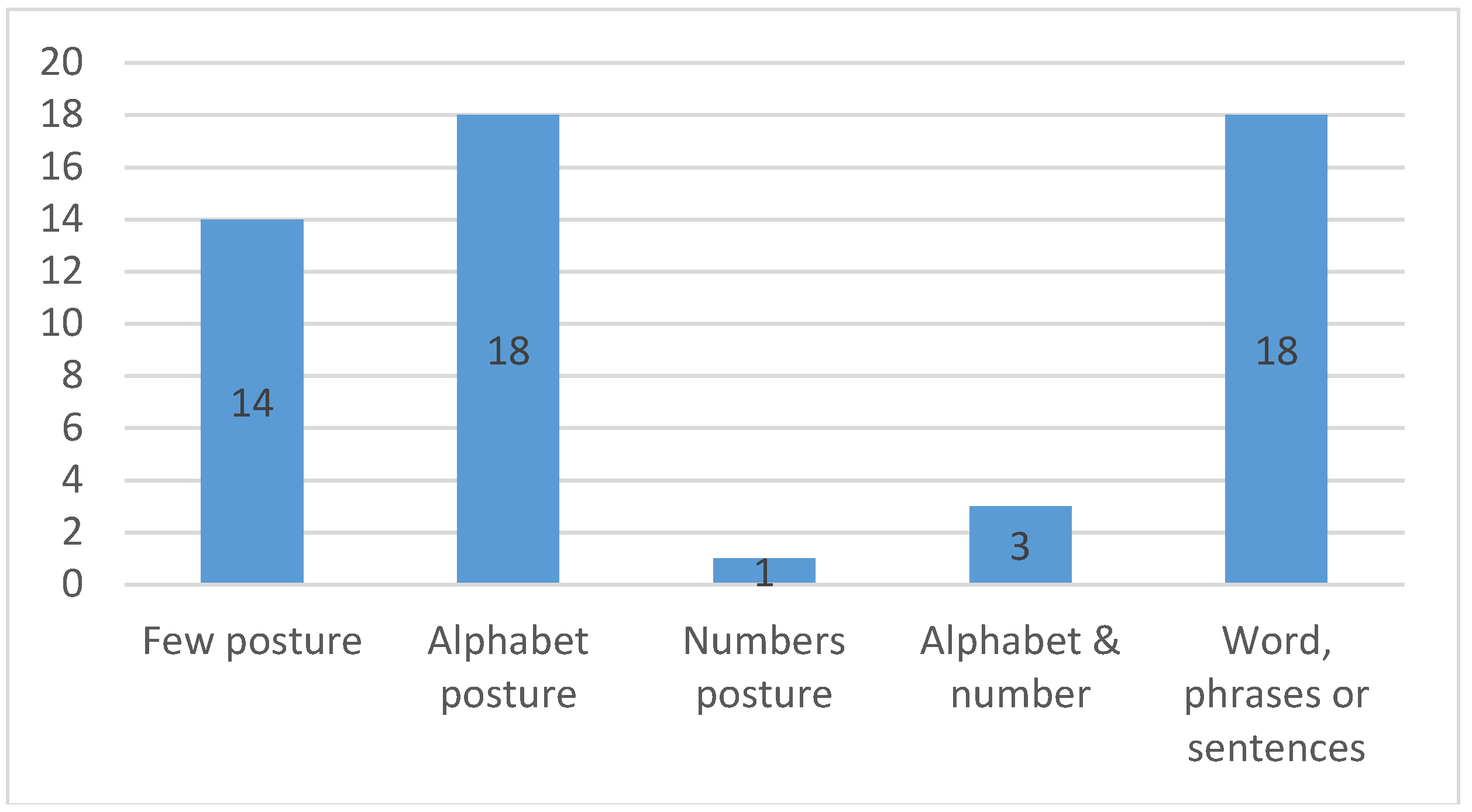
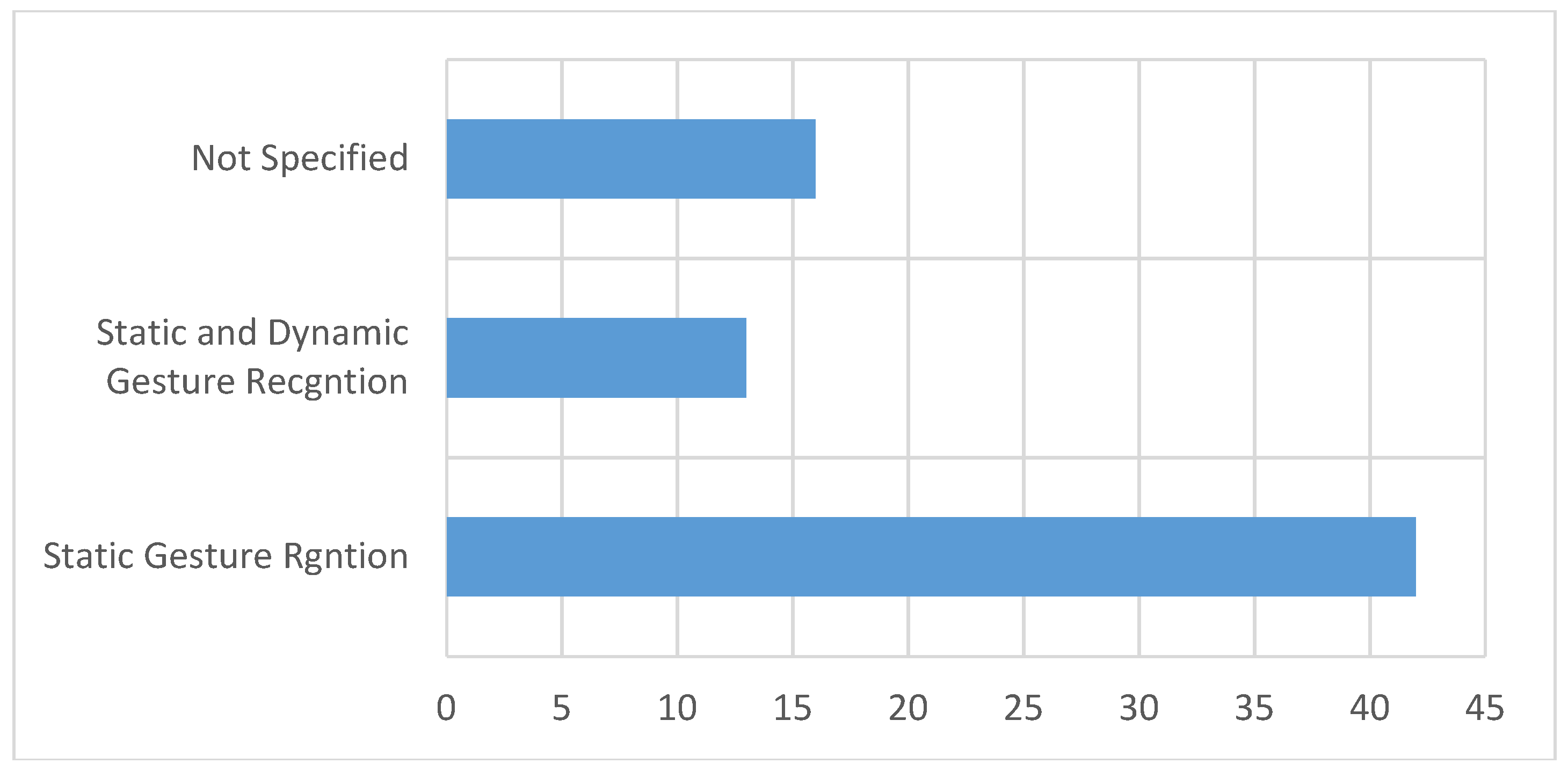
4.2. Distribution by Gesture Type
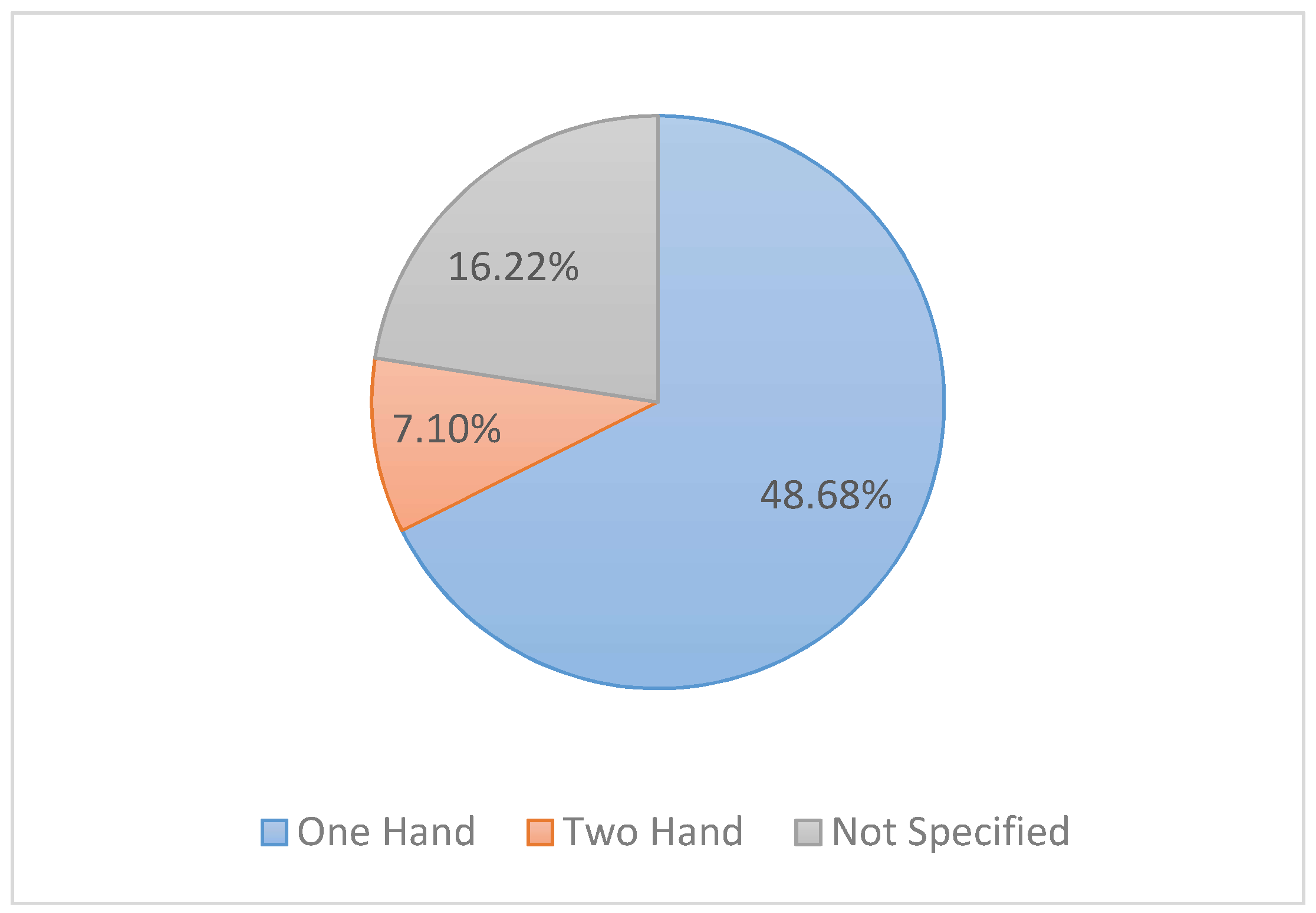
4.3. Distribution by Number of Hands
5. Discussion
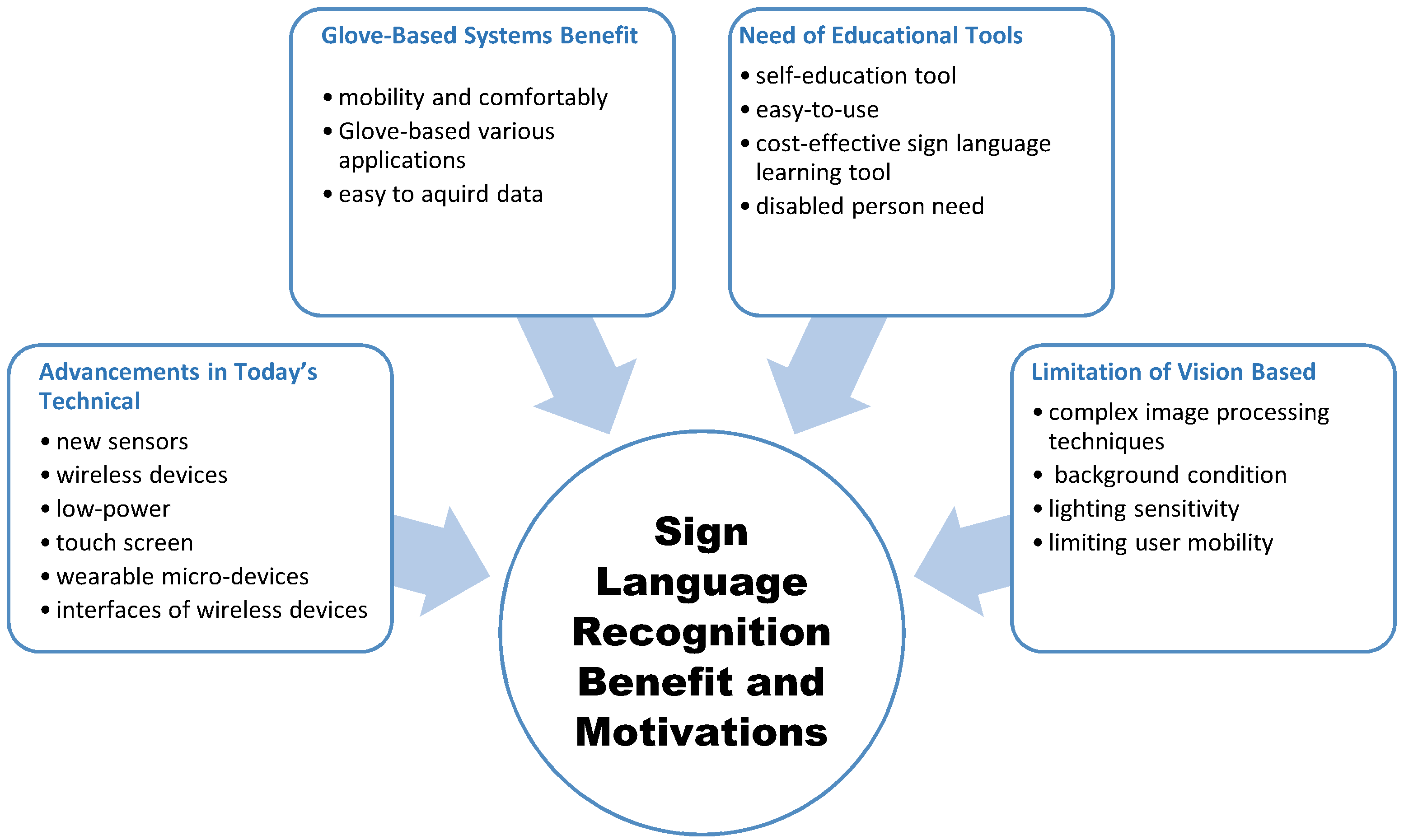
5.1. Motivations and Benefits of SLR Using Gloves
5.1.1. Advancements in Today’s Technology
5.1.2. Educational Tools for SL
5.1.3. Advantages of Glove-Based Systems
5.1.4. Limitation of the Vision-Based Method
5.2. Challenges in SLR Using Gloves
5.2.1. Nature of SL
5.2.2. Pertain to User
5.2.3. Pertain to Devices
5.2.4. Regarding SL Recognition
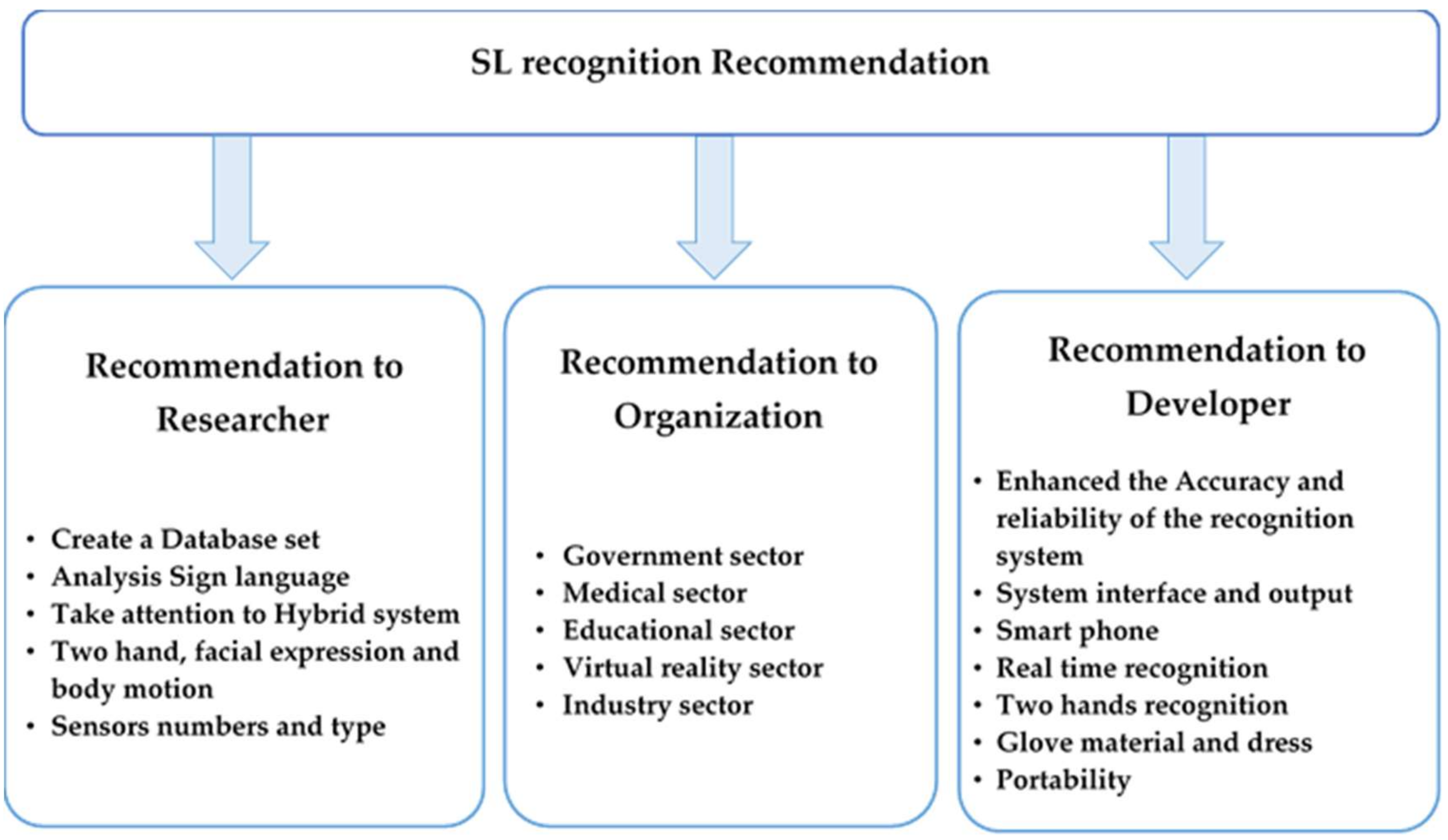
5.3. Recommendations
5.3.1. Recommendations to Developers
5.3.2. Recommendations to Organizations
5.3.3. Recommendations to Researchers
6. Important Issues in Previous Work
7. Patents
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Word Health Orgnanization. Deafness and Hearing Loss. http://www.who.int/mediacentre/factsheets/fs300/en/#content (accessed on 13 November 2017).
- Sharma, V.; Kumar, V.; Masaguppi, S.C.; Suma, M.; Ambika, D. Virtual Talk for Deaf, Mute, Blind and Normal Humans. In Proceedings of the 2013 Texas Instruments India Educators’ Conference (TIIEC), Bangalore, India, 4–6 April 2013; pp. 316–320. [Google Scholar]
- Bhatnagar, V.S.; Magon, R.; Srivastava, R.; Thakur, M.K. A cost effective Sign Language to voice emulation system. In Proceedings of the 2015Eighth International Conference on Contemporary Computing (IC3), Noida, India, 20–22 August 2015; pp. 521–525. [Google Scholar]
- Tanyawiwat, N.; Thiemjarus, S. Design of an assistive communication glove using combined sensory channels. In Proceedings of the 2012 Ninth International Conference on Wearable and Implantable Body Sensor Networks (BSN), London, UK, 9–12 May 2012; pp. 34–39. [Google Scholar]
- Vutinuntakasame, S.; Jaijongrak, V.R.; Thiemjarus, S. An assistive body sensor network glove for speech-and hearing-impaired disabilities. In Proceedings of the 2011 International Conference on Body Sensor Networks (BSN), Dallas, TX, USA, 23–25 May2011; pp. 7–12. [Google Scholar]
- Kanwal, K.; Abdullah, S.; Ahmed, Y.B.; Saher, Y.; Jafri, A.R. Assistive Glove for Pakistani Sign Language Translation. In Proceedings of the 2014 IEEE 17th International Multi-Topic Conference (INMIC), Karachi, Pakistan, 8–10 December 2014; pp. 173–176. [Google Scholar]
- Fu, Y.F.; Ho, C.S. Static finger language recognition for handicapped aphasiacs. In Proceedings of the Second International Conference on Innovative Computing, Information and Control, Kumamoto, Japan, 5–7 September 2007; p. 299. [Google Scholar]
- Arif, A.; Rizvi, S.T.H.; Jawaid, I.; Waleed, M.A.; Shakeel, M.R. Techno-Talk: An American Sign Language (ASL) Translator. In Proceedings of the 2016International Conference on Control, Decision and Information Technologies (CoDIT), Saint Julian, Malta, 6–8 April 2016; pp. 665–670. [Google Scholar]
- Sriram, N.; Nithiyanandham, M. A hand gesture recognition based communication system for silent speakers. In Proceedings of the 2013 International Conference on Human Computer Interactions (ICHCI), Warsawa, Poland, 14–17 August 2013; pp. 1–5. [Google Scholar]
- Phi, L.T.; Nguyen, H.D.; Bui, T.Q.; Vu, T.T. A glove-based gesture recognition system for Vietnamese sign language. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 1555–1559. [Google Scholar]
- Hoque, M.T.; Rifat-Ut-Tauwab, M.; Kabir, M.F.; Sarker, F.; Huda, M.N.; Abdullah-Al-Mamun, K. Automated Bangla sign language translation system: Prospects, limitations and applications. In Proceedings of the 2016 5th International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 13–14 May 2016; pp. 856–862. [Google Scholar]
- el Hayek, H.; Nacouzi, J.; Kassem, A.; Hamad, M.; El-Murr, S. Sign to letter translator system using a hand glove. In Proceedings of the 2014 Third International Conference on e-Technologies and Networks for Development (ICeND), Beirut, Lebanon, 29 April–1 May 2014; pp. 146–150. [Google Scholar]
- Bedregal, B.R.C.; Dimuro, G.P. Interval fuzzy rule-based hand gesture recognition. In Proceedings of the 12th GAMM-IMACS International Symposium on Scientific Computing, Computer Arithmetic and Validated Numerics, Duisburg, Germany, 26–29 September 2006; p. 12. [Google Scholar]
- Borghetti, M.; Sardini, E.; Serpelloni, M. Sensorized glove for measuring hand finger flexion for rehabilitation purposes. IEEE Trans. Instrum. Meas. 2013, 62, 3308–3314. [Google Scholar] [CrossRef]
- Pławiak, P.; Sośnicki, T.; Niedźwiecki, M.; Tabor, Z.; Rzecki, K. Hand body language gesture recognition based on signals from specialized glove and machine learning algorithms. IEEE Trans. Ind. Inform. 2016, 12, 1104–1113. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. Int. J. Surg. 2010, 8, 336–341. [Google Scholar] [CrossRef] [PubMed]
- Al-Ahdal, M.E.; Nooritawati, M.T. Review in sign language recognition systems. In Proceedings of the 2012 IEEE Symposium on Computers & Informatics (ISCI), Penang, Malaysia, 18–20 March 2012; pp. 52–57. [Google Scholar]
- Anderson, R.; Wiryana, F.; Ariesta, M.C.; Kusuma, G.P. Sign Language Recognition Application Systems for Deaf-Mute People: A Review Based on Input-Process-Output. Procedia Comput. Sci. 2017, 116, 441–448. [Google Scholar]
- Cocchia, A. Smart and digital city: A systematic literature review. In Smart City; Springer: Berlin, Germany, 2014; pp. 13–43. [Google Scholar]
- Alaa, M.; Zaidan, A.; Zaidan, B.; Talal, M.; Kiah, M. A review of smart home applications based on Internet of Things. J. Netw. Comput. Appl. 2017, 97, 48–65. [Google Scholar] [CrossRef]
- Das, P.; De, R.; Paul, S.; Chowdhury, M.; Neogi, B. Analytical study and overview on glove based Indian Sign Language interpretation technique. In Proceedings of the Michael Faraday IET International Summit 2015, Kolkata, India, 12–13 September 2015. [Google Scholar]
- Ramli, S. GMT feature extraction for representation of BIM sign language. In Proceedings of the 2012 IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, 16–17 July 2012; pp. 43–48. [Google Scholar]
- LaViola, J. A Survey of Hand Posture and Gesture Recognition Techniques and Technology; Brown University: Providence, RI, USA, 1999; Volume 29. [Google Scholar]
- Alvi, A.K.; Azhar, M.Y.B.; Usman, M.; Mumtaz, S.; Rafiq, S.; Rehman, R.U.; Ahmed, I. Pakistan sign language recognition using statistical template matching. Int. J. Inf. Technol. 2004, 1, 1–12. [Google Scholar]
- Kumar, P.; Gauba, H.; Roy, P.P.; Dogra, D.P. A multimodal framework for sensor based sign language recognition. Neurocomputing 2017, 259, 21–38. [Google Scholar] [CrossRef]
- Erol, A.; Bebis, G.; Nicolescu, M.; Boyle, R.D.; Twombly, X. Vision-based hand pose estimation: A review. Comput. Vis. Image Understand. 2007, 108, 52–73. [Google Scholar] [CrossRef]
- Luqman, H.; Mahmoud, S.A. Transform-based Arabic sign language recognition. Procedia Comput. Sci. 2017, 117, 2–9. [Google Scholar]
- Thalange, A.; Dixit, S. COHST and wavelet features based Static ASL numbers recognition. Procedia Comput. Sci. 2016, 92, 455–460. [Google Scholar] [CrossRef]
- Karami, A.; Zanj, B.; Sarkaleh, A.K. Persian sign language (PSL) recognition using wavelet transform and neural networks. Exp. Syst. Appl. 2011, 38, 2661–2667. [Google Scholar] [CrossRef]
- Munib, Q.; Habeeb, M.; Takruri, B.; Al-Malik, H.A. American sign language (ASL) recognition based on Hough transform and neural networks. Exp. Syst. Appl. 2007, 32, 24–37. [Google Scholar] [CrossRef]
- Geetha, M.; Manjusha, U. A vision-based recognition of indian sign language alphabets and numerals using B-spline approximation. Int. J. Comput. Sci. Eng. 2012, 4, 406–415. [Google Scholar]
- Elons, A.S.; Abull-Ela, M.; Tolba, M.F. A proposed PCNN features quality optimization technique for pose-invariant 3D Arabic sign language recognition. Appl. Soft Comput. 2013, 13, 1646–1660. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Aly, S. Appearance-based arabic sign language recognition using hidden markov models. In Proceedings of the 2014 International Conference on Engineering and Technology (ICET), Cairo, Egypt, 19–20 April 2014; pp. 1–6. [Google Scholar]
- Ibrahim, N.B.; Selim, M.M.; Zayed, H.H. An Automatic Arabic Sign Language Recognition System (ArSLRS). J. King Saud Univ.-Comput. Inf. Sci. 2017. [Google Scholar] [CrossRef]
- Vijayalakshmi, P.; Aarthi, M. Sign language to speech conversion. In Proceedings of the 2016 International Conference on Recent Trends in Information Technology, Chennai, India, 8–9 April 2016; pp. 1–6. [Google Scholar]
- Chouhan, T.; Panse, A.; Voona, A.K.; Sameer, S. Smart glove with gesture recognition ability for the hearing and speech impaired. In Proceedings of the 2014 IEEE Global Humanitarian Technology Conference-South Asia Satellite (GHTC-SAS), Trivandrum, India, 26–27 September 2014; pp. 105–110. [Google Scholar]
- Praveen, N.; Karanth, N.; Megha, M. Sign language interpreter using a smart glove. In Proceedings of the 2014 International Conference on Advances in Electronics, Computers and Communications (ICAECC), Bangalore, India, 10–11 October 2014; pp. 1–5. [Google Scholar]
- Ahmed, S.F.; Ali, S.M.B.; Qureshi, S.S.M. Electronic speaking glove for speechless patients, a tongue to a dumb. In Proceedings of the 2010 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology (STUDENT), Petaling Jaya, Malaysia, 20–21 November 2010; pp. 56–60. [Google Scholar]
- Fu, Y.F.; Ho, C.S. Development of a programmable digital glove. Smart Mater. Struct. 2008, 17, 025031. [Google Scholar] [CrossRef]
- Tubaiz, N.; Shanableh, T.; Assaleh, K. Glove-based continuous Arabic sign language recognition in user-dependent mode. IEEE Trans. Hum. Mach. Syst. 2015, 45, 526–533. [Google Scholar] [CrossRef]
- Adnan, N.H.; Wan, K.; Shahriman, A.; Zaaba, S.; Basah, S.N.; Razlan, Z.M.; Hazry, D.; Ayob, M.N.; Rudzuan, M.N.; Aziz, A.A. Measurement of the flexible bending force of the index and middle fingers for virtual interaction. Procedia Eng. 2012, 41, 388–394. [Google Scholar] [CrossRef]
- Kau, L.J.; Su, W.L.; Yu, P.J.; Wei, S.J. A real-time portable sign language translation system. In Proceedings of the 2015 IEEE 58th International Midwest Symposium on Circuits and Systems (MWSCAS), Fort Collins, CO, USA, 2–5 August 2015; pp. 1–4. [Google Scholar]
- Pradhan, G.; Prabhakaran, B.; Li, C. Hand-gesture computing for the hearing and speech impaired. IEEE MultiMed. 2008, 15. [Google Scholar] [CrossRef]
- Preetham, C.; Ramakrishnan, G.; Kumar, S.; Tamse, A.; Krishnapura, N. Hand talk-implementation of a gesture recognizing glove. In Proceedings of the 2013 Texas Instruments India Educators' Conference (TIIEC), Bangalore, India, 4–6 April 2013; pp. 328–331. [Google Scholar]
- Abdulla, D.; Abdulla, S.; Manaf, R.; Jarndal, A.H. Design and implementation of a sign-to-speech/text system for deaf and dumb people. In Proceedings of the 2016 5th International Conference on Electronic Devices, Systems and Applications, Ras AL Khaimah, UAE, 6–8 December 2016; pp. 1–4. [Google Scholar]
- Abhishek, K.S.; Qubeley, L.C.F.; Ho, D. Glove-based hand gesture recognition sign language translator using capacitive touch sensor. In Proceedings of the 2016 IEEE International Conference on Electron Devices and Solid-State Circuits (EDSSC), Hong Kong, China, 3–5 August 2016; pp. 334–337. [Google Scholar]
- Sharma, D.; Verma, D.; Khetarpal, P. LabVIEW based Sign Language Trainer cum portable display unit for the speech impaired. In Proceedings of the 2015 Annual IEEE India Conference (INDICON), New Delhi, India, 17–20 December 2015; pp. 1–6. [Google Scholar]
- Mátételki, P.; Pataki, M.; Turbucz, S.; Kovács, L. An assistive interpreter tool using glove-based hand gesture recognition. In Proceedings of the 2014 IEEE Canada International Humanitarian Technology Conference-(IHTC), Montreal, QC, Canada, 1–4 June 2014; pp. 1–5. [Google Scholar]
- Sadek, M.I.; Mikhael, M.N.; Mansour, H.A. A new approach for designing a smart glove for Arabic Sign Language Recognition system based on the statistical analysis of the Sign Language. In Proceedings of the 2017 34th National Radio Science Conference (NRSC), Alexandria, Egypt, 13–16 March 2017; pp. 380–388. [Google Scholar]
- Elmahgiubi, M.; Ennajar, M.; Drawil, N.; Elbuni, M.S. Sign language translator and gesture recognition. In Proceedings of the 2015 Global Summit on Computer & Information Technology (GSCIT), Sousse, Tunisia, 11–13 June 2015; pp. 1–6. [Google Scholar]
- Gupta, D.; Singh, P.; Pandey, K.; Solanki, J. Design and development of a low cost Electronic Hand Glove for deaf and blind. In Proceedings of the 2015 2nd International Conference on Computing for Sustainable Global Development, New Delhi, India, 11–13 March 2015; pp. 1607–1611. [Google Scholar]
- McGuire, R.M.; Hernandez-Rebollar, J.; Starner, T.; Henderson, V.; Brashear, H.; Ross, D.S. Towards a one-way American sign language translator. In Proceedings of the Sixth IEEE International Conference on Automatic Face and Gesture Recognition, Amsterdam, The Netherlands, 17–19 September 2004; pp. 620–625. [Google Scholar]
- Gałka, J.; Mąsior, M.; Zaborski, M.; Barczewska, K. Inertial motion sensing glove for sign language gesture acquisition and recognition. IEEE Sens. J. 2016, 16, 6310–6316. [Google Scholar] [CrossRef]
- Lei, L.; Dashun, Q. Design of data-glove and Chinese sign language recognition system based on ARM9. In Proceedings of the 2015 12th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Qingdao, China, 16–18 July 2015; pp. 1130–1134. [Google Scholar]
- Lokhande, P.; Prajapati, R.; Pansare, S. Data Gloves for Sign Language Recognition System. Int. J. Comput. Appl. 2015, 11–14. [Google Scholar]
- Trottier-Lapointe, W.; Majeau, L.; El-Iraki, Y.; Loranger, S.; Chabot-Nobert, G.; Borduas, J.; Lavoie, J.; Lapointe, J. Signal processing for low cost optical data glove. In Proceedings of the 2012 11th International Conference on Information Science, Signal Processing and their Applications (ISSPA), Montreal, QC, Canada, 2–5 July 2012; pp. 501–504. [Google Scholar]
- Sekar, H.; Rajashekar, R.; Srinivasan, G.; Suresh, P.; Vijayaraghavan, V. Low-cost intelligent static gesture recognition system. In Proceedings of the 2016 Annual IEEE Systems Conference, Orlando, FL, USA, 18–21 April 2016; pp. 1–6. [Google Scholar]
- Bui, T.D.; Nguyen, L.T. Recognizing postures in Vietnamese sign language with MEMS accelerometers. IEEE Sens. J. 2007, 7, 707–712. [Google Scholar] [CrossRef]
- Abualola, H.; al Ghothani, H.; Eddin, A.N.; Almoosa, N.; Poon, K. Flexible gesture recognition using wearable inertial sensors. In Proceedings of the 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, UAE, 16–19 October 2016; pp. 1–4. [Google Scholar]
- Rishikanth, C.; Sekar, H.; Rajagopal, G.; Rajesh, R.; Vijayaraghavan, V. Low–cost intelligent gesture recognition engine for audio-vocally impaired individuals. In Proceedings of the 2014 IEEE Global Humanitarian Technology Conference (GHTC), San Jose, CA, USA, 10–13 October 2014; pp. 628–634. [Google Scholar]
- Kong, W.; Ranganath, S. Towards subject independent continuous sign language recognition: A segment and merge approach. Pattern Recognit. 2014, 47, 1294–1308. [Google Scholar] [CrossRef]
- Ibarguren, A.; Maurtua, I.; Sierra, B. Layered architecture for real time sign recognition: Hand gesture and movement. Eng. Appl. Artif. Intell. 2010, 23, 1216–1228. [Google Scholar] [CrossRef]
- Ani, A.I.C.; Rosli, A.D.; Baharudin, R.; Abbas, M.H.; Abdullah, M.F. Preliminary study of recognizing alphabet letter via hand gesture. In Proceedings of the 2014 International Conference on Computational Science and Technology (ICCST), Kota Kinabalu, Malaysia, 27–28 August 2014; pp. 1–5. [Google Scholar]
- Jadhav, A.J.; Joshi, M.P. AVR based embedded system for speech impaired people. In Proceedings of the International Conference on Automatic Control and Dynamic Optimization Techniques (ICACDOT), Pune, India, 9–10 September 2016; pp. 844–848. [Google Scholar]
- Kadam, K.; Ganu, R.; Bhosekar, A.; Joshi, S. American sign language interpreter. In Proceedings of the 2012 IEEE Fourth International Conference on Technology for Education (T4E), Hyderabad, India, 18–20 July 2012; pp. 157–159. [Google Scholar]
- Khambaty, Y.; Quintana, R.; Shadaram, M.; Nehal, S.; Virk, M.A.; Ahmed, W.; Ahmedani, G. Cost effective portable system for sign language gesture recognition. In Proceedings of the 2008 IEEE International Conference on System of Systems Engineering, Monterey, CA, USA, 2–4 June 2008; pp. 1–6. [Google Scholar]
- Harish, N.; Poonguzhali, S. Design and development of hand gesture recognition system for speech impaired people. In Proceedings of the 2015 International Conference on Industrial Instrumentation and Control (ICIC), Pune, India, 28–30 May 2015; pp. 1129–1133. [Google Scholar]
- Ahmed, S.; Islam, R.; Zishan, M.S.R.; Hasan, M.R.; Islam, M.N. Electronic speaking system for speech impaired people: Speak up. In Proceedings of the 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Dhaka, Bangladesh, 21–23 May 2015; pp. 1–4. [Google Scholar]
- Shukor, A.Z.; Miskon, M.F.; Jamaluddin, M.H.; bin Ali, F.; Asyraf, M.F.; bin Bahar, M.B. A new data glove approach for Malaysian sign language detection. Procedia Comput. Sci. 2015, 76, 60–67. [Google Scholar] [CrossRef]
- Iwasako, K.; Soga, M.; Taki, H. Development of finger motion skill learning support system based on data gloves. Procedia Comput. Sci. 2014, 35, 1307–1314. [Google Scholar] [CrossRef]
- Mehdi, S.A.; Khan, Y.N. Sign language recognition using sensor gloves. In Proceedings of the 9th International Conference on Neural Information Processing, Singapore, 18–22 November 2002; pp. 2204–2206. [Google Scholar]
- Swee, T.T.; Ariff, A.; Salleh, S.H.; Seng, S.K.; Huat, L.S. Wireless data gloves Malay sign language recognition system. In Proceedings of the 2007 6th International Conference on Information, Communications & Signal Processing, Singapore, 10–13 December 2007; pp. 1–4. [Google Scholar]
- Swee, T.T.; Salleh, S.H.; Ariff, A.; Ting, C.M.; Seng, S.K.; Huat, L.S. Malay Sign Language gesture recognition system. In Proceedings of the ICIAS 2007 International Conference on Intelligent and Advanced Systems, Kuala Lumpur, Malaysia, 25–28 November 2007; pp. 982–985. [Google Scholar]
- Oz, C.; Leu, M.C. American Sign Language word recognition with a sensory glove using artificial neural networks. Eng. Appl. Artif. Intell. 2011, 24, 1204–1213. [Google Scholar] [CrossRef]
- Anupreethi, H.; Vijayakumar, S. MSP430 based sign language recognizer for dumb patients. Procedia Eng. 2012, 38, 1374–1380. [Google Scholar] [CrossRef]
- Kosmidou, V.E.; Hadjileontiadis, L.J. Sign language recognition using intrinsic-mode sample entropy on sEMG and accelerometer data. IEEE Trans. Biomed. Eng. 2009, 56, 2879–2890. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Chen, X.; Li, Y.; Lantz, V.; Wang, K.; Yang, J. A framework for hand gesture recognition based on accelerometer and EMG sensors. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 1064–1076. [Google Scholar] [CrossRef]
- Ibarguren, A.; Maurtua, I.; Sierra, B. Layered architecture for real-time sign recognition. Comput. J. 2009, 53, 1169–1183. [Google Scholar] [CrossRef]
- Bajpai, D.; Porov, U.; Srivastav, G.; Sachan, N. Two Way Wireless Data Communication and American Sign Language Translator Glove for Images Text and Speech Display on Mobile Phone. In Proceedings of the 2015 Fifth International Conference on Communication Systems and Network Technologies (CSNT), Gwalior, India, 4–6 April 2015; pp. 578–585. [Google Scholar]
- Aguiar, S.; Erazo, A.; Romero, S.; Garcés, E.; Atiencia, V.; Figueroa, J.P. Development of a smart glove as a communication tool for people with hearing impairment and speech disorders. In Proceedings of the 2016 IEEE Ecuador Technical Chapters Meeting (ETCM), Guayaquil, Ecuador, 12–14 October 2016; pp. 1–6. [Google Scholar]
- Oz, C.; Leu, M.C. Linguistic properties based on American Sign Language isolated word recognition with artificial neural networks using a sensory glove and motion tracker. Neurocomputing 2007, 70, 2891–2901. [Google Scholar] [CrossRef]
- López-Noriega, J.E.; Fernández-Valladares, M.I.; Uc-Cetina, V. Glove-based sign language recognition solution to assist communication for deaf users. In Proceedings of the 2014 11th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Ciudad del Carmen, Mexico, 29 September–3 October 2014; pp. 1–6. [Google Scholar]
- Kim, J.; Wagner, J.; Rehm, M.; André, E. Bi-channel sensor fusion for automatic sign language recognition. In Proceedings of the 2008 8th IEEE International Conference on Automatic Face & Gesture Recognition, Amsterdam, The Netherlands, 17–19 September 2008; pp. 1–6. [Google Scholar]
- Dipietro, L.; Sabatini, A.M.; Dario, P. A survey of glove-based systems and their applications. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2008, 38, 461–482. [Google Scholar] [CrossRef]
- Vijay, P.K.; Suhas, N.N.; Chandrashekhar, C.S.; Dhananjay, D.K. Recent developments in sign language recognition: A review. Int. J. Adv. Comput. Eng. Commun. Technol. 2012, 1, 21–26. [Google Scholar]
- Mohandes, M.; Deriche, M. Arabic sign language recognition by decisions fusion using Dempster-Shafer theory of evidence. In Proceedings of the 2003 Computing, Communications and IT Applications Conference, Hong Kong, China, 1–4 April 2013; pp. 90–94. [Google Scholar]
- Kong, W.; Ranganath, S. Signing exact english (SEE): Modeling and recognition. Pattern Recognit. 2008, 41, 1638–1652. [Google Scholar] [CrossRef]
- Sidek, O.; Hadi, M.A. Wireless gesture recognition system using MEMS accelerometer. In Proceedings of the 2014 International Symposium on Technology Management and Emerging Technologies (ISTMET), Bandung, Indonesia, 27–29 May 2014; pp. 444–447. [Google Scholar]
- Hussain, M.; Al-Haiqi, A.; Zaidan, A.; Zaidan, B.; Kiah, M.L.M.; Anuar, N.B.; Abdulnabi, M. The landscape of research on smartphone medical apps: Coherent taxonomy, motivations, open challenges and recommendations. Comput. Methods Prog. Biomed. 2015, 122, 393–408. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.; Gupta, G.S.; Bailey, D.; Demidenko, S.; Messom, C. Sign language analysis and recognition: A preliminary investigation. In Proceedings of the 24th International Conference Image and Vision Computing New Zealand, Wellington, New Zealand, 23–25 November 2009; pp. 119–123. [Google Scholar]
- Sagawa, H.; Takeuchi, M. A method for recognizing a sequence of sign language words represented in a japanese sign language sentence. In Proceedings of the Fourth IEEE International Conference on Automatic Face and Gesture Recognition, Grenoble, France, 28–30 March 2000; pp. 434–439. [Google Scholar]
- Hernandez-Rebollar, J. ASL Glove with 3-Axis Accelerometers. U.S. Patent 11,836,136, 8 August 2007. [Google Scholar]
- Barranco, J.Á.Á.L.G.L. System and Method of Sign Language Interpretation. Spanish Patent 201,130,193, 14 February 2011. [Google Scholar]
- Shin, H.S.; Park, J.H.; Ahn, S.J.; Kim, D.; Lee, J.; Jeong, E. Finger Motion Recognition Glove Using Conductive Materials and Method Thereof. Google Patents 13,560,849, 30 January 2014. [Google Scholar]
- Wang, B.; Jiang, X.; Luo, H.; Ren, L.; Zhang, J.; Xu, K.; Chen, Y.L.; Zhou, Z.; Guo, W. Glove for Use in Collecting Data for Sign Language Recognition. Google Patents 15,504,708, 14 September 2017. [Google Scholar]
- Bavunoglu, H.; Bavunoglu, E.S. System of Converting Hand and Finger Movements into Text and Audio. Google Patents 15,034,875, 29 September 2016. [Google Scholar]
- Sepehr, M. The Intelligent System of Digital Glove for Producing the Words and Sounds. French Patent WO2017208147A1, 30 May 2016. [Google Scholar]
- Mohandes, M.; Deriche, M.A.; Aliyu, S.O. Arabic Sign Language Recognition Using Multi-Sensor Data Fusion. Google Patents 9,672,418, 6 June 2017. [Google Scholar]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Device/Components | Language | Gesture | Samples per Gesture | Gesture Performer | Sample Size |
|---|---|---|---|---|---|---|
| [37] | five flex sensors | American Sign Language | four gestures | |||
| [47] | five flex sensors, accelerometer, and tactile (contact) sensor | American Sign Language | set of 8 gestures A-H | 10 times | 80 samples | |
| [69] | fiveflex sensors and ADXL335 accelerometer | American Sign Language | 26 gestures alphabet and 10 more gestures to numbers | 256 samples | ||
| [39] | 8 touch sensors | American Sign Language | numbers 0 to 9 and the 26 English alphabets, A to Z | 30 times | 1080 samples | |
| [64] | five flex sensors and a 3D accelerometer | American Sign Language | American National Corpus is used A-Z and “space” plus “full stop” | 5 times | 6 females and 4 males age between 20–26 | 1400 samples |
| [46] | six inertial measurement units (IMUs) accelerometer | American Sign Language | American Sign Language (ASL) letters without letters J and Z | one time | data was collected from 9 participants | 216 samples |
| [70] | 5DT Glove | American Sign Language | 26 letters of the alphabet | 3 times | three subjects familiar with the sign language | 234 samples |
| [50] | five flex sensors, MEMS accelerometer (ADXL345), and contact sensor | American Sign Language | A-Z letters | 10 times | ||
| [71] | CybergloveTM | American Sign Language | 50 ASL word | 12 times | multiple person trained | 120 samples |
| [80] | five fabric contact sensors, five flex sensors, and 3D accelerometer | American Sign Language | A to Z and “THE QUICK BROWN FOX JUMPS OVER THE LAZY DOG” statement | 5 times | seven subjects, including six hearing and speech-impaired high school students and teachers | |
| [74] | Cyberglove | American Sign Language | 74 distinct sentences from 107-sign vocabulary | 2–6 times | eight signers | 2393 sentences and 10,852 sign instances |
| [61] | two CyberGloves | Arabic Sign Language | 100 two-handed signs | 20 times | adult volunteer from the deaf community | 2000 samples |
| [40] | DG5-VHand data gloves | Arabic Sign Language | 40 sentences using an 80-word lexicon | 10 times | 24-year-old right-handed female | 800 samples |
| [38] | flex and contact sensors | Australian Sign Language | 120 static gestures | 100 times | 3600 samples. | |
| [51] | flex sensors with 9-axis IMU sensor | Chinese Sign Language | Chinese phonetic alphabet including a, b, c, zh, and ch | 30 times | two different individuals | 150 samples |
| [78] | three-axis accelerometer (ACC) and multichannel electromyography (EMG) | Chinese Sign Language | 72 signs | 12 times | Two subjects: male (age 27) and female (age 25) | |
| [52] | 9-axis accelerometer | English Alphabet | 26 English alphabet | one time | one person | 26 samples |
| [36] | Hall Effect sensor and accelerometer (ADXL-535). | English Numbers | English Numbers 0–9 | 20 times | 200 samples | |
| [77] | 3-axis accelerometers (ACC) and electromyogram (EMG) | German Sign Language | seven words | 10 times | eight subjects (6 males and 2 females, aged 27 to 41) | 560 samples |
| [83] | EMG and 3-D Accelerometer | Greek Sign Language | 60-word lexicon | 10 times | three native signers | 1800 samples |
| [79] | Three-flex sensors and three axes accelerometer | Indian Sign Language | four words namely HELLO, YES, SORRY, and PLEASE | |||
| [55] | flex sensors and accelerometer | Indian Sign Language | eight commonly used words | |||
| [75] | five flexure sensors and three accelerometers | Malay Sign Language | 25 Bahasa Isyarat Malaysia (BIM) sign words are used | 20 times | only one signer is used for creating signer | 500 samples |
| [6] | 10 tilt sensors and 3-axis accelerometer | Malaysian Sign Language | A, B, and C. 1, 2, and 3 ‘Saya’, ‘Makan’, and ‘Apa’. | 10 times | three individuals | 270 samples |
| [56] | five flex sensors and 3-axis accelerometer | Pakistani Sign Language | 10 static gestures | (15 females and 15 males) who varied from13 to 45 years old | ||
| [78] | 5DT Data Glove | Spanish Alphabet | six movements | 10 times | 60 cases and 37 attributes | |
| [49] | 10 flex sensors attached to each finger and three-axis accelerometer | Taiwanese Sign Language | five words, namely, Lonely, Promote, Assist, Love, and Protect | each with 50 tests | five subjects | 1250 tests |
| [35] | 10 flex sensors and one accelerometer ADXL345 | Vietnamese Sign Language | 29 letters | 50 tested for each letter | 1450 samples | |
| [4] | five ADXL202 accelerometers | Vietnamese Sign Language | 23 Vietnamese-based letters with two postures for “space” and “punctuation | 40 times | five different persons | 200 samples |
| Article Ref. | Publisher | Article Type | Journal Name/Conference Name | Impact Factor/ Conf. Location | Citation | Year |
|---|---|---|---|---|---|---|
| [37] | IEEE | Journal | IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews) | 2.171 | 475 | 2008 |
| [35] | IEEE | Journal | IEEE Transactions on Systems, Man, and Cybernetics | 2.86 | 278 | 2011 |
| [26] | Elsevier | Journal | Engineering Applications of Artificial Intelligence | 3.74 | 109 | 2011 |
| [58] | IEEE | Conference | Advances in Electronics, Computers, and Communications (ICAECC) | India | 80 | 2007 |
| [65] | IEEE | Conference | Automatic Face and Gesture Recognition | South Korea | 57 | 2007 |
| [56] | IEEE | Journal | IEEE Transactions on Instrumentation and Measurement | 2.456 | 48 | 2013 |
| [32] | Elsevier | Journal | Pattern Recognition | 5.582 | 43 | 2014 |
| [20] | IEEE | Conference | Information, Communications & Signal Processing | Singapore | 33 | 2007 |
| [28] | Elsevier | Journal | Engineering ApplicationsofArtificialIntelligence24 | 2.894 | 30 | 2010 |
| [39] | IEEE | Conference | Body Sensor Networks (BSN) | USA | 28 | 2011 |
| [21] | IEEE | Journal | IEEE Transactions on Human–Machine Systems | 2.493 | 27 | 2015 |
| [29] | Elsevier | Journal | Neurocomputing | 3.317 | 27 | 2007 |
| [51] | IEEE | Journal | IEEE Multimedia | 2.849 | 22 | 2008 |
| [50] | IEEE | Conference | India Educators’ Conference (TIIEC) | India | 19 | 2013 |
| [52] | IEEE | Conference | Scientific Computing, Computer Arithmetic, and Validated Numeric | Germany | 18 | 2007 |
| [30] | Elsevier | Journal | Procedia Engineering | 0.74 | 17 | 2012 |
| [47] | IEEE | Conference | Sustainable Utilization and Development in Engineering and Technology (STUDENT) | Malaysia | 17 | 2010 |
| [38] | IEEE | Conference | Fourth International Conference on Technology for Education | India | 15 | 2012 |
| [44] | IEEE | Conference | Wearable and Implantable Body Sensor Networks (BSN) | UK | 14 | 2012 |
| [63] | IEEE | Conference | Global Humanitarian Technology Conference—South Asia Satellite (GHTC—SAS) | India | 14 | 2014 |
| [12] | IEEE | Conference | Global Humanitarian Technology Conference (GHTC) | USA | 13 | 2016 |
| [16] | IEEE | Conference | Advances in Electronics, Computers, and Communications (ICAECC) | India | 13 | 2014 |
| [54] | IEEE | Conference | Intelligent and Advanced Systems | Malaysia | 13 | 2007 |
| [3] | Elsevier | Journal | Procedia Computer Science | 0.74 | 11 | 2015 |
| [3] | Elsevier | Journal | Procedia Computer Science | 0.74 | 11 | 2015 |
| [55] | IEEE | Conference | Computer Engineering & Systems (ICCES) | Egypt | 11 | 2013 |
| [23] | IEEE | Conference | System of Systems Engineering | Singapore | 10 | 2008 |
| [25] | IEEE | Conference | Computing, Communications, and IT Applications Conference (ComComAp) | China | 10 | 2013 |
| [31] | Elsevier | Journal | Pattern Recognition | 4.582 | 10 | 2008 |
| [61] | IEEE | Conference | e-Technologies and Networks for Development (ICeND) | Lebanon | 10 | 2014 |
| [9] | IEEE | Conference | Electrical Engineering and Information Communication Technology (ICEEICT) | Bangladesh | 8 | 2015 |
| [45] | IEEE | Conference | Machine Learning and Cybernetics | China | 8 | 2008 |
| [57] | IEEE | Conference | Image and Vision Computing New Zealand | New Zealand | 8 | 2009 |
| [13] | IEEE | Conference | Systems Conference (SysCon) | USA | 7 | 2014 |
| [19] | IEEE | Conference | Global Humanitarian Technology Conference (GHTC) | India | 7 | 2014 |
| [24] | IEEE | Journal | The Computer Journal | 0.711 | 7 | 2010 |
| [2] | IEEE | Conference | Human Computer Interactions (ICHCI) | India | 6 | 2013 |
| [11] | IEEE | Journal | IEEE Sensors Journal | 2.512 | 6 | 2016 |
| [1] | IEEE | Conference | International Conference on Control, Automation, and Systems | South Korea | 5 | 2015 |
| [6] | IEEE | Journal | International Journal of Computer Applications | 0.26 | 5 | 2015 |
| [8] | IEEE | Conference | International Conference on Electronic Measurement & Instruments | China | 5 | 2015 |
| [10] | IEEE | conference | Electron Devices and Solid-State Circuits (EDSSC) | China | 5 | 2015 |
| [64] | IEEE | Conference | Innovative Computing, Information, and Control | Japan | 5 | 2007 |
| [4] | IEEE | Conference | Circuits and Systems (MWSCAS) | USA | 4 | 2015 |
| [5] | IEEE | Conference | Multi-Topic Conference (INMIC) | Pakistan | 4 | 2014 |
| [18] | Elsevier | Journal | Procedia Engineering | 0.74 | 4 | 2012 |
| [40] | IEEE | Conference | Humanitarian Technology Conference—(IHTC) | Canada | 4 | 2014 |
| [7] | IEEE | Conference | Computing for Sustainable Global Development (INDIACom) | India | 3 | 2015 |
| [14] | IEEE | Conference | Computational Science and Technology (ICCST) | Malaysia | 3 | 2016 |
| [15] | IEEE | Journal | IEEE Sensors Journal | 2.512 | 3 | 2016 |
| [27] | Elsevier | Journal | Procedia Computer Science | 0.74 | 3 | 2014 |
| [33] | Elsevier | Journal | Pattern Recognition Letters | 1.995 | 3 | 2017 |
| [59] | IEEE | Journal | IEEE Transactions on Biomedical Engineering | 3.577 | 3 | 2016 |
| [60] | IEEE | Conference | Computer & Information Technology (GSCIT) | Tunisia | 3 | 2015 |
| [17] | IEEE | Conference | Control, Decision, and Information Technologies (CoDIT) | St. Julian’s, Malta | 2 | 2016 |
| [34] | IEEE | Conference | Contemporary Computing (IC3) | India | 2 | 2015 |
| [66] | IEEE | Conference | Communication Systems and Network Technologies (CSNT) | India | 2 | 2015 |
| [67] | IEEE | Conference | Technology Management and Emerging Technologies (ISTMET) | Indonesia | 2 | 2014 |
| [22] | IEEE | Conference | Computational Science and Computational Intelligence (CSCI) | USA | 1 | 2016 |
| [43] | IEEE | Conference | Electronic Devices, Systems, and Applications (ICEDSA) | United Arab Emirates | 1 | 2016 |
| [46] | IEEE | Conference | Ecuador Technical Chapters Meeting (ETCM) | Ecuador | 1 | 2016 |
| [49] | IEEE | Conference | Electrical Engineering, Computing Science, and Automatic Control (CCE) | Mexico | 1 | 2014 |
| [36] | IEEE | Conference | Radio Science Conference (NRSC) | Egypt | 0 | 2017 |
| [41] | IEEE | Conference | Michael Faraday IET International Summit 2015 | India | 0 | 2015 |
| [42] | IEEE | Conference | Automatic Control and Dynamic Optimization Techniques (ICACDOT) | India | 0 | 2016 |
| [48] | IEEE | Conference | Circuits and Systems (MWSCAS) | United Arab Emirates | 0 | 2016 |
| [53] | IEEE | Conference | India Conference (INDICON) | India | 0 | 2015 |
| [62] | IEEE | Conference | Information Science, Signal Processing, and their Applications (ISSPA) | Canada | 0 | 2012 |
| Ref. | Sensor Used for | Gesture | Data Set | SignType | Execute Real Time | No. of Hands | Interfaced | Design Hardware Module | Software Application | Language Analysis | Communication | Low Cost System | Mobility/Portable | Use Start/Stop Signs | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bend Detection | Move Detection | Static | Dynamic | Number | Alphabet | Word/Phrases | Few Gesture | Isolated | Continuous | One Hand | TwoHand | PC | LCD/Speake | Mobile | 3DAnimation | One way | Two ways | ||||||||||
| [21] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [2] | * | * | * | * | * | * | * | * | * | * | |||||||||||||||||
| [7] | * | * | * | * | * | * | * | * | * | * | |||||||||||||||||
| [44] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [12] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [37] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [68] | * | * | * | * | * | * | * | * | |||||||||||||||||||
| [65] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [39] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [36] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [80] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [4] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [59] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [3] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [58] | * | * | * | * | * | * | * | * | * | * | |||||||||||||||||
| [50] | * | * | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||
| [47] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [8] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [64] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [10] | * | * | * | * | * | * | * | * | * | * | |||||||||||||||||
| [51] | * | * | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||
| [54] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [81] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [43] | * | * | * | * | * | * | * | ||||||||||||||||||||
| [71] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [74] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [61] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [70] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [76] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [53] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [52] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [42] | * | * | * | * | * | * | * | * | * | * | |||||||||||||||||
| [39] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [86] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [57] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [27] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [40] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [49] | * | * | * | * | * | * | * | * | * | * | |||||||||||||||||
| [69] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [73] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [72] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [41] | * | * | * | * | * | * | * | * | * | * | |||||||||||||||||
| [9] | * | * | * | * | * | * | |||||||||||||||||||||
| [38] | * | * | * | * | * | * | * | * | |||||||||||||||||||
| [45] | * | * | * | * | * | * | * | * | * | ||||||||||||||||||
| [24] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [66] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [5] | * | * | * | * | * | * | |||||||||||||||||||||
| [35] | * | * | * | * | * | * | * | * | * | * | |||||||||||||||||
| [55] | * | * | * | * | * | * | * | * | |||||||||||||||||||
| [67] | * | * | * | * | * | * | * | * | |||||||||||||||||||
| [56] | * | * | * | * | * | * | * | * | * | * | * | * | |||||||||||||||
| [6] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [11] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [87] | * | * | * | * | |||||||||||||||||||||||
| [82] | * | * | * | * | * | * | * | * | |||||||||||||||||||
| [83] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [42] | * | * | * | * | * | * | * | * | * | * | * | ||||||||||||||||
| [13] | * | * | * | * | |||||||||||||||||||||||
| [91] | * | * | * | ||||||||||||||||||||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, M.A.; Zaidan, B.B.; Zaidan, A.A.; Salih, M.M.; Lakulu, M.M.b. A Review on Systems-Based Sensory Gloves for Sign Language Recognition State of the Art between 2007 and 2017. Sensors 2018, 18, 2208. https://doi.org/10.3390/s18072208
Ahmed MA, Zaidan BB, Zaidan AA, Salih MM, Lakulu MMb. A Review on Systems-Based Sensory Gloves for Sign Language Recognition State of the Art between 2007 and 2017. Sensors. 2018; 18(7):2208. https://doi.org/10.3390/s18072208
Chicago/Turabian StyleAhmed, Mohamed Aktham, Bilal Bahaa Zaidan, Aws Alaa Zaidan, Mahmood Maher Salih, and Muhammad Modi bin Lakulu. 2018. "A Review on Systems-Based Sensory Gloves for Sign Language Recognition State of the Art between 2007 and 2017" Sensors 18, no. 7: 2208. https://doi.org/10.3390/s18072208
APA StyleAhmed, M. A., Zaidan, B. B., Zaidan, A. A., Salih, M. M., & Lakulu, M. M. b. (2018). A Review on Systems-Based Sensory Gloves for Sign Language Recognition State of the Art between 2007 and 2017. Sensors, 18(7), 2208. https://doi.org/10.3390/s18072208