Spatio-Temporal Optimization of Perishable Goods’ Shelf Life by a Pro-Active WSN-Based Architecture



Abstract
1. Introduction
- Continuous monitoring of the goods, with the possibility to follow the pallets during the transit.
- Implementation of a specific pallet’s SL prediction model extended all over the storage site. It guarantees the identification of the storage location, inside the warehouse, that optimizes the specific SL. Integration on the central control unit of a Quality Controlled Logistic (QCL) algorithm. It implements a first-to-expire first-out (FEFO) warehouse management [9].
- Pallets’ automatic displacement according to the SL prediction model and QCL algorithm outcomes.
- Easy re-programmability of the platform by in loco operations or by remote actions.
- Low cost, easy installation and operation.
2. State of the Art
3. The WSN-Based Architecture
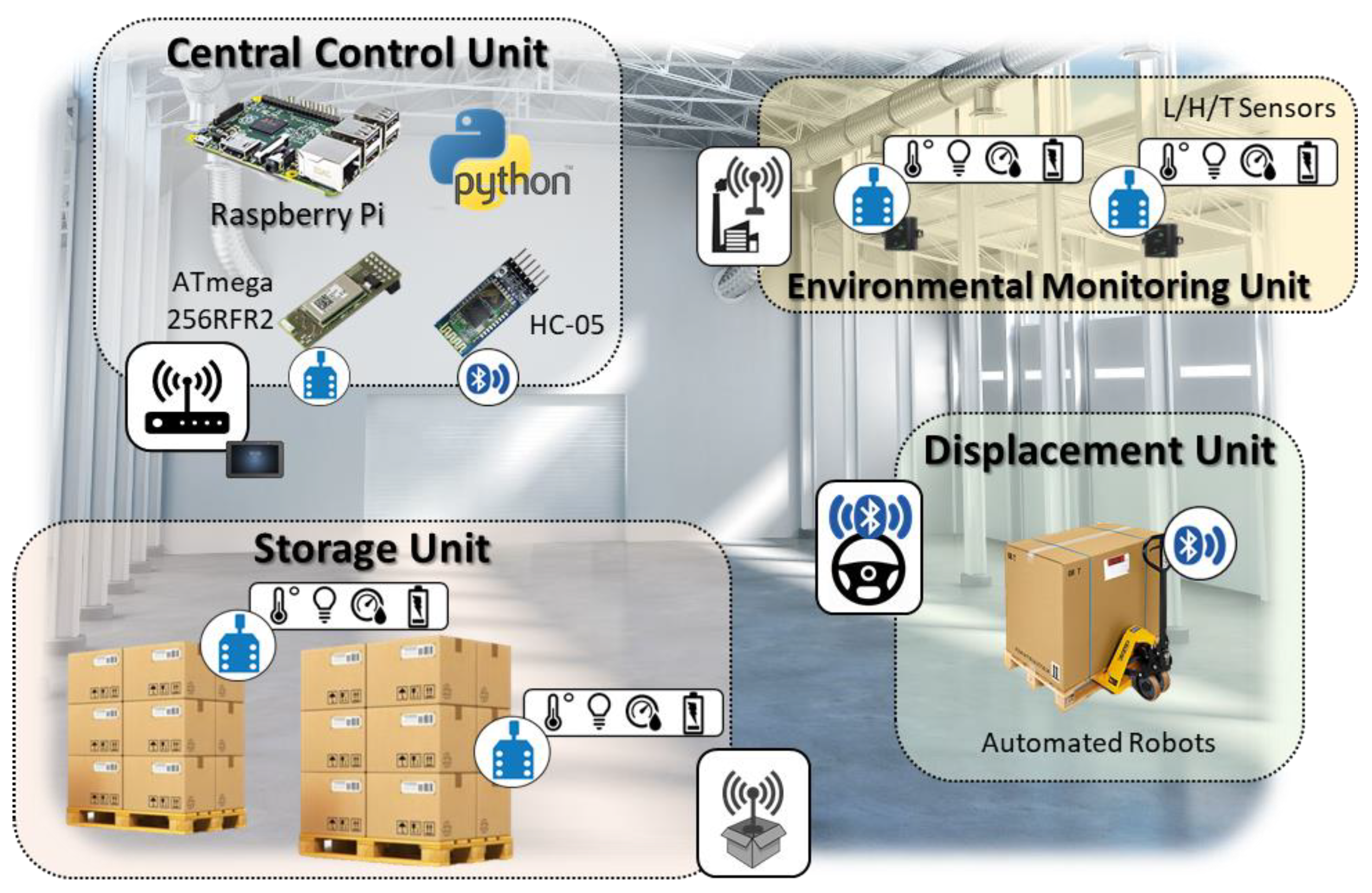
3.1. Sensing Platform
3.2. Communication Management
4. Shelf-Life Prediction
4.1. Shelf Life Prediction 1st Order Kinetic Model
4.2. Implemented Monitoring and Control Protocol
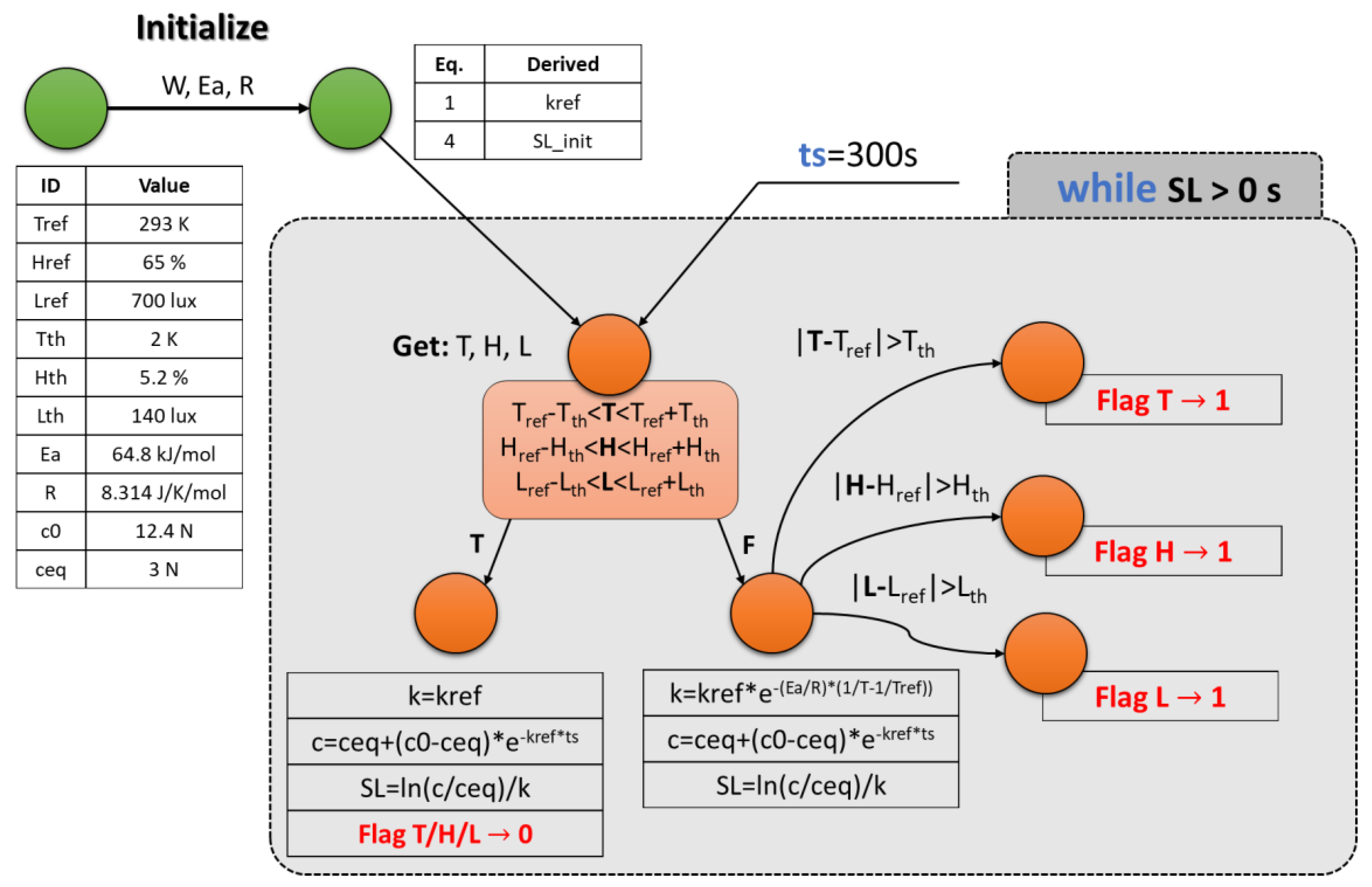
- Upload, on the system interface, the T/H/L reference values and sensors accuracies. The initialization phase will derive the kref [21] (according to Equation (1)) and the initial shelf life (Equation (4)).
- Start the computation in the while cycle, driven by the condition: SL > 0. The while repeats the computation with a fixed sampling time (ts). In this example ts = 300 s (e.g., 1 read/5 min).
- Get T/H/L values from sensors interfaces and compare them with the reference ones (T/H/Lref), taking into the account the sensors accuracies (T/H/Lth).
- If the recommended conditions are respected, the system uses kref as k(T) in Equations (3) and (4) for calculating quality parameter c and computing SL, respectively. If a threshold, or more than one, is surpassed (potentially incorrect storage conditions), the rate k is calculated according Equation (2), the quality parameter c and the SL are derived, respectively, via Equations (3) and (4). Then, the values that overcame the respective thresholds, activate a dedicated flag for an external intervention request.
4.3. Quality-Controlled Logistic Algorithm
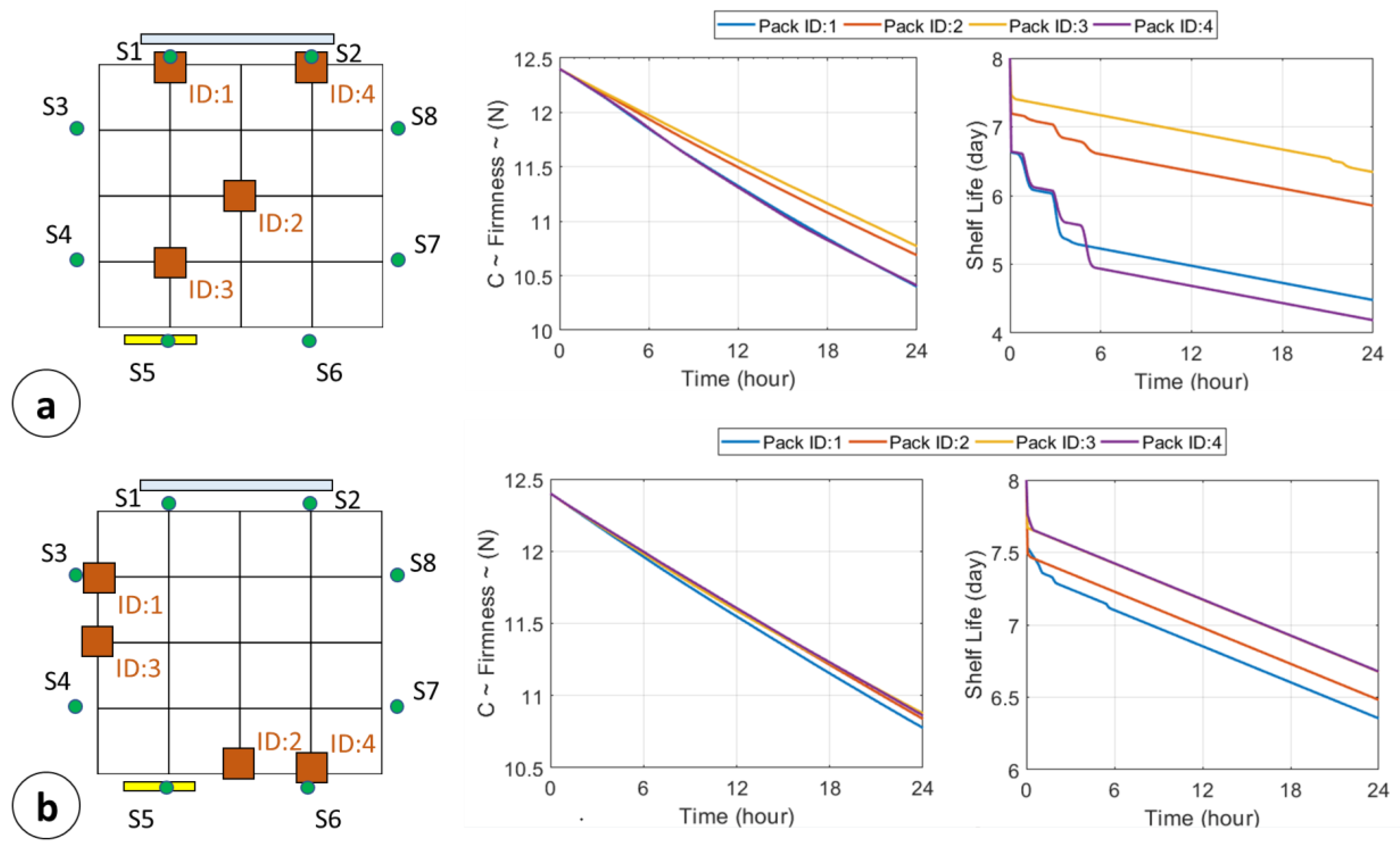
- The algorithm virtually derives, on the storage room surface, an M1 × M2 lattice (the dimensions are arbitrary, in this case M1 = M2 = M = 5 as shown by the background matrix in Figure 3). The Np pallets to be managed (with Np < M2 − 3) are placed on Np row-column different intersections.
- The system identifies each pallet with a number (ID) and derives an encumbrance matrix (EM) used to define the navigation path of the selected pallet to be moved. It allows pre-calculating the path in order to avoid collisions with other pallets.
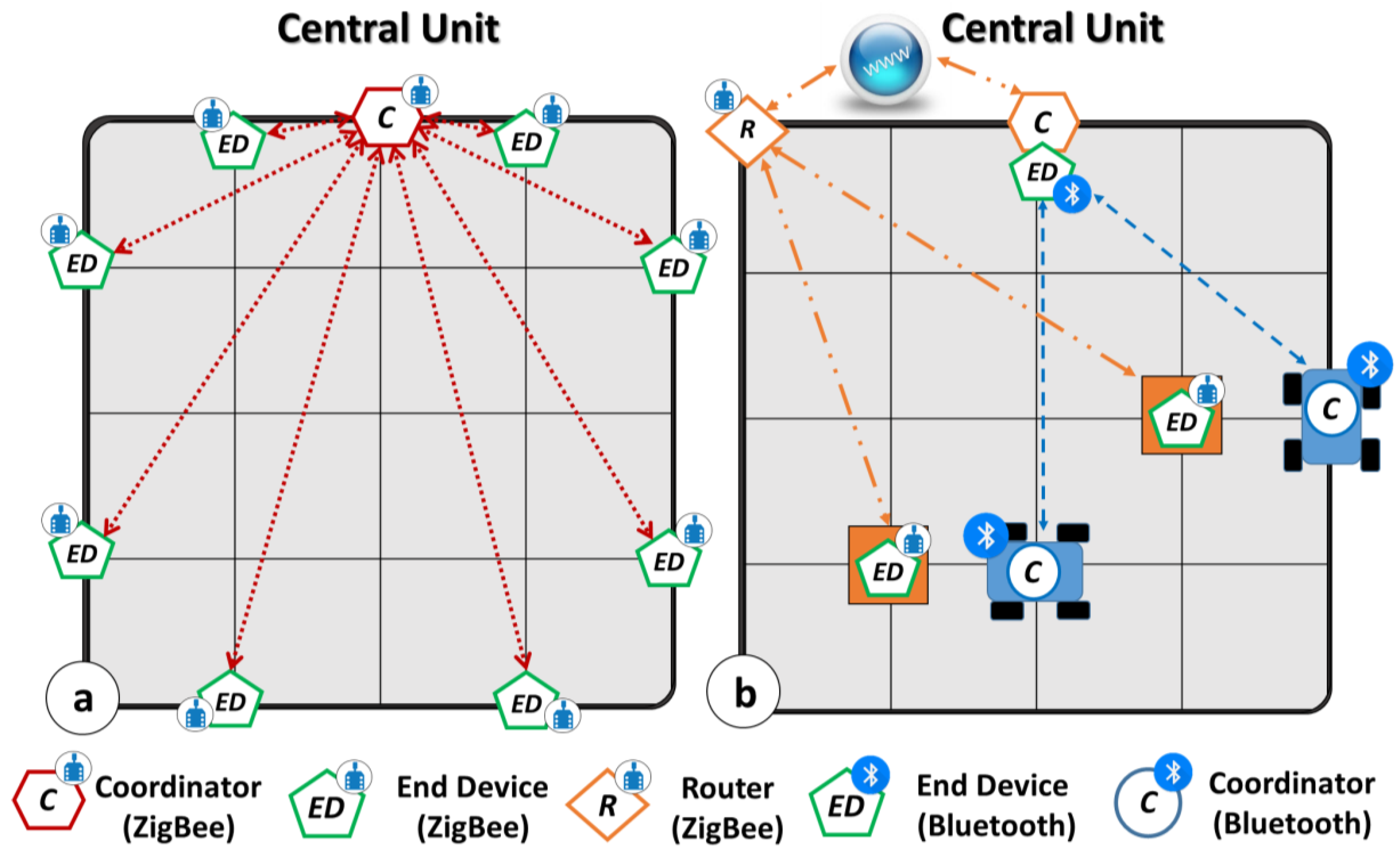
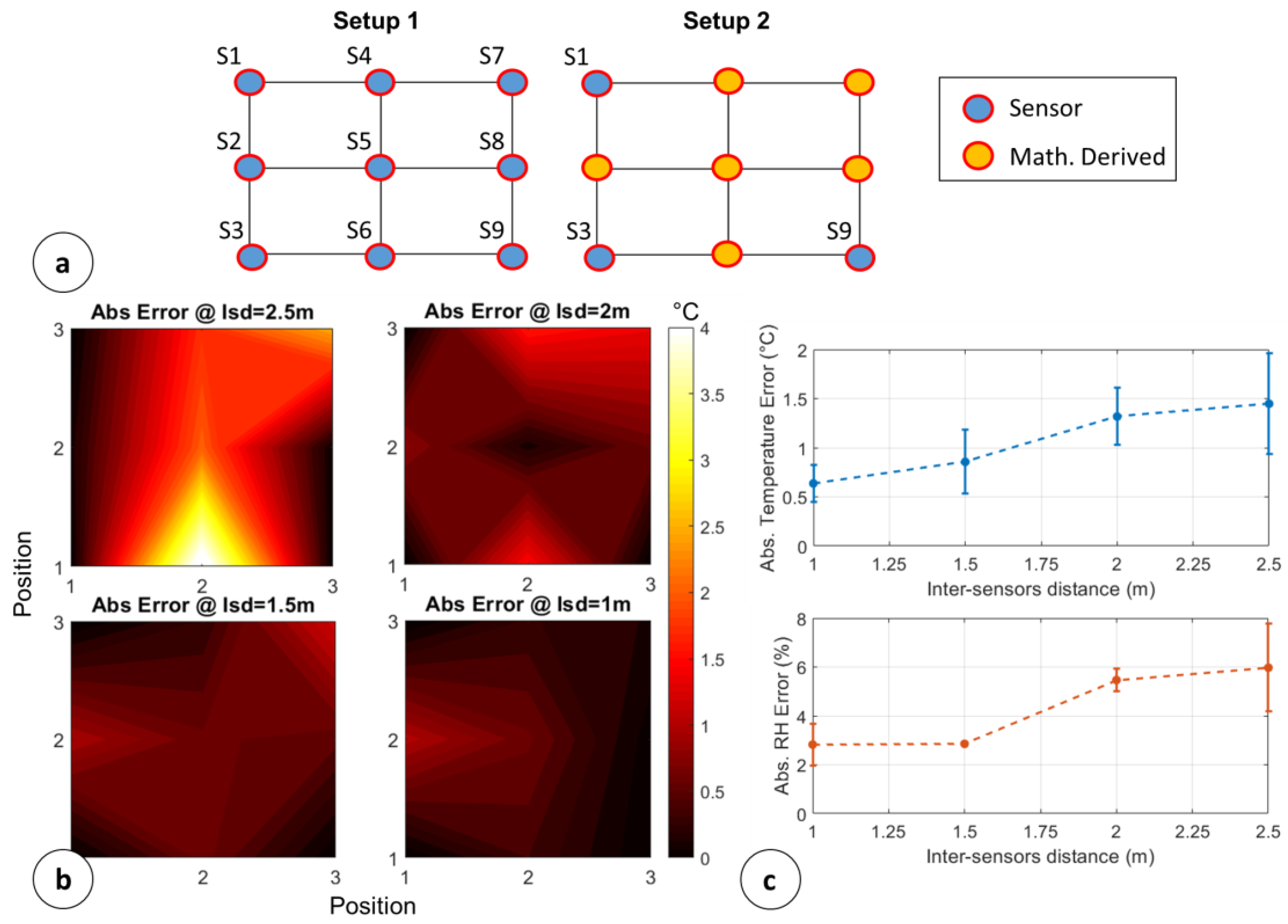
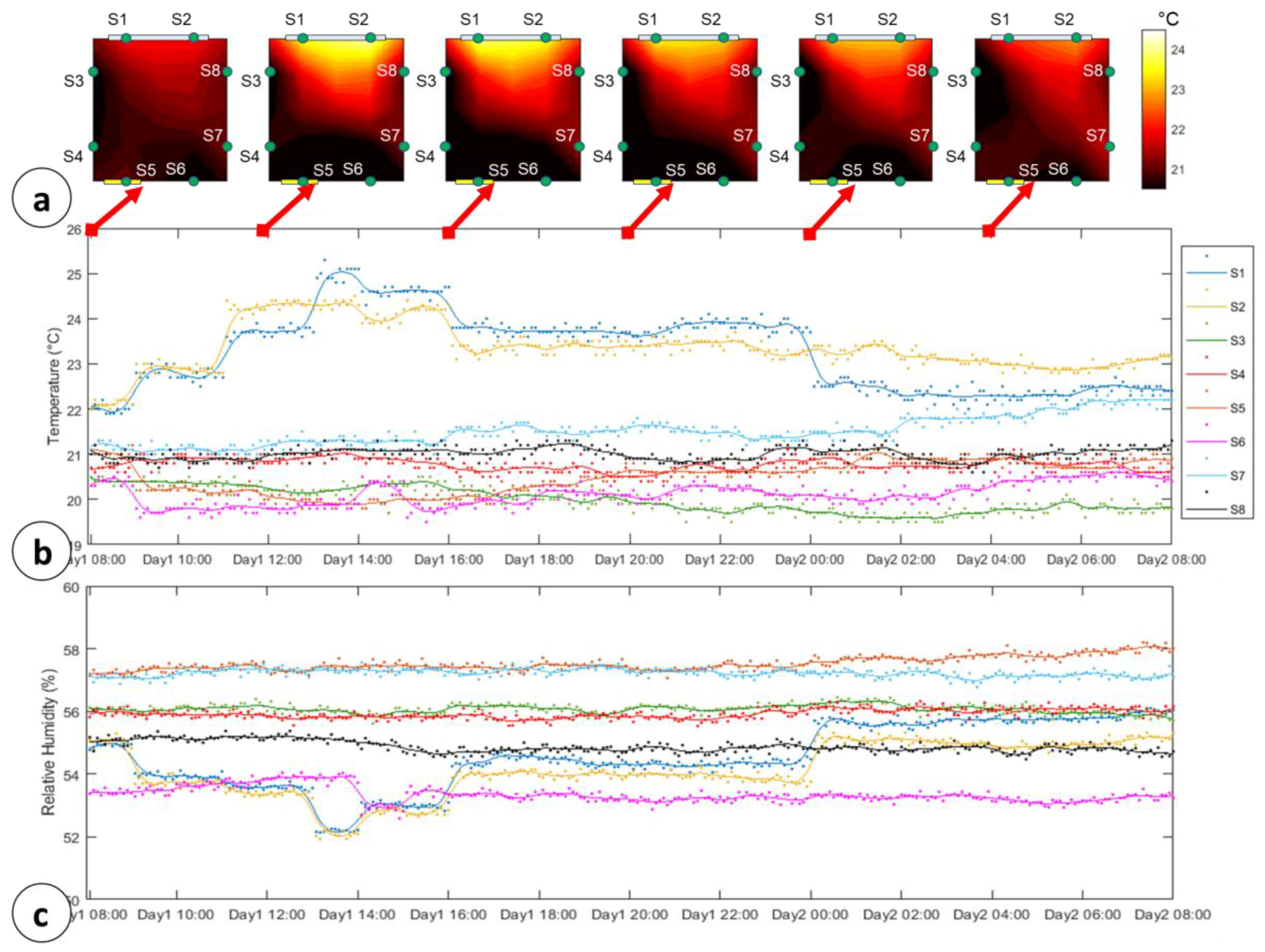
- The system extract two M × M matrices, named Tref and Tamb. The former, Tref M,M, consists in a matrix that contains the temperature reference value [6,19,20]. For sake of clarity, in the following Trefi,j will identify the element in the i-th row and j-th column. The second matrix, Tamb M,M, contains the temperature values acquired by sensors and the mathematically derived ones. In the proposed example, eight values of T are directly extracted by the sensors, according to the end devices in Figure 3a: {Tamb1,2, Tamb1,4, Tamb2,1, Tamb2,5, Tamb4,1, Tamb4,5, Tamb5,2, Tamb5,4}. The other matrix elements are mathematically derived by a contiguous elements average, as proposed in literature [25].
- The temperature matrices lead to the definition of Np overlapped 2D quality matrices, which constitute a 3D matrix C M,M,Np, with Ci,j,p the quality that a specific p-th would have, if it were in i-th row and j-th column position.
- 5.
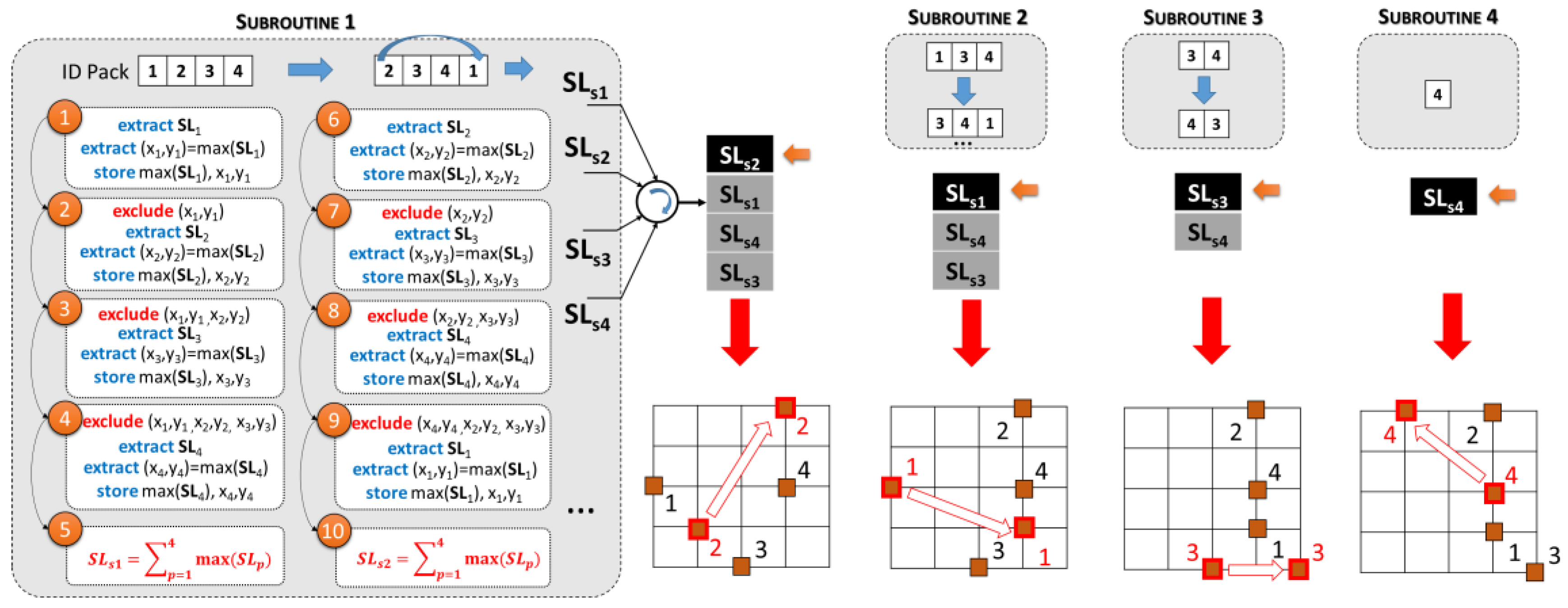
- Since the algorithm has the C and Tamb matrices, it can derive the shelf life 3D matrix SL M,M,Np with SLi,j,p the shelf life of a specific p-th pallet would have, if it were in i-th row and j-th column position. The displacement operations ask for identifying (with the right order) the pallets movements that maximize the overall shelf life in the warehouse.
- (a)
- Firstly, the pallet with ID = 1 is selected and the coordinates (x1, y1) that maximize the SL of the first pallet are identified on the SLp=1 map.
- (b)
- The coordinates (x1,y1) are excluded from the computation, and the point (a) is repeated on the SLp=2 matrix. Then, the algorithm has identified the maximum SL for the pallet with ID = 2 and the coordinates that ensure it.
- (c)
- The steps (a) and (b) are repeated for the four pallets. Then, a sum of all the four SLp is done defining the SLs1 parameter, that represent the overall shelf life of the warehouse content if the first evaluated pallet is the ID = 1, and the last is the 4th.
- (d)
- All the points from (a)–(c) are repeated, shifting the indexes vector of a single position on the left. In this case the first ID is 2, and the last ID is 1. The routine defines the SLs2. Then the iterations are repeated considering as first ID the 3, and as last the 2, and so on (Figure 6).
- (e)
- After 20 iterations the system has four values of SLs: {SLs1, SLs2, SLs3, SLs4}. Then, it sorts these values in a decreasing order. The highest overall SL (e.g., SLs2 in the example) identifies the “best pallet” to be displaced.
4.4. Displacement Unit Management
- BT paired #Coherent add_btT, add_btP
- Define Max1, Max2 #Maximum row and column indexes
- Define Cp, Rs #Cp: central angular position for wheels, Rs: Rotation angle (right and left) to be subtracted or added to Cp.
- Init x1 = x2, y1 = y2 #Initial Position (1), Final Position (2)
- Init dX, dY = 0 #Difference between x-axis and y-axis points during displacement
- Init Z = 0 #FSM state
- Init SM0,SM1 # Driving Variables for servomotor (Steering)
- Init DCm0,DCm1 # Driving Variables for DC Motors
- Read String→ verify Separator: if separator = 90→ x1, y1 #Previous Final positionif x1 > Max1 & y1 > Max2 #if Out of range, wait for next communicationbreak→ x2, y2 #Next Positionif x2 > Max1 & y2 > Max2 # if Out of range, wait for next communicationbreak
- Check all separators
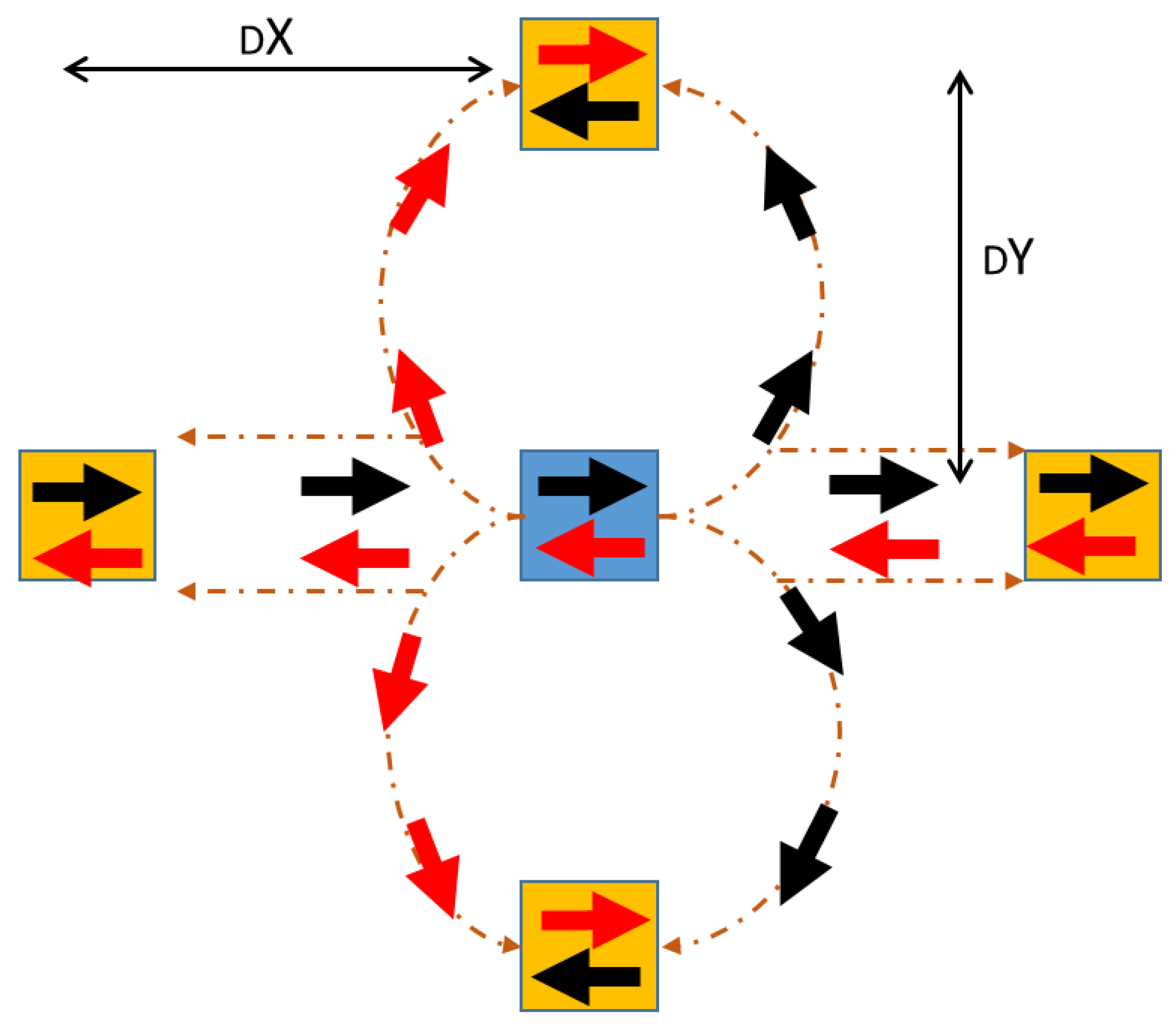
- dX = x2 − x1; dY = y2 − y1; S = (dX + dY)
- define dX1,dX0, dY1,dY0
dX (or dY) {dX1,dX0} or {dY1,dY0} 0 00 1 01 −1 11 - if S > 1 # wrong step-by-step path (variation on X and Y axis)break
- # Driving Bit Computing
- SM1 = (dX0 OR dY0) AND (NOT dX1) AND (NOT dX0) AND (Z XOR dY1)
- SM0 = (dX0 OR dY0) AND (NOT dX1) AND (NOT dX0)
- DCm1 = (dX0 OR dY0) AND (NOT dY1) AND (NOT dY0) AND (NOT (dX1 XOR Z))
- DCm0 = (dX0 OR dY0) AND ((NOT dY1) AND (NOT dY0)) OR ((NOT dX1) AND (NOT dX0))
- Z = ((dX0 OR dY0) AND (((NOT Z) AND (NOT dX1) AND (NOT dX0)) OR (Z AND (NOT dY1) AND (NOT dY0))) OR (NOT(dX0 OR dy0) AND Z)
- # Steering Angle Management
- write to Servomotor angle → Cp-Rs*SM0*(2*SM1-1) #Angular position of servomotor
- # Steering Angle Management
IN1 IN2 Event 0 (1) 0 (1) Keep the position 0 1 Go Ahead 1 0 Go Backward - write to DC motors → IN1 ← DCm1, IN2 ← NOT(DCm1) AND (DCm0) #Motor Management
5. Results
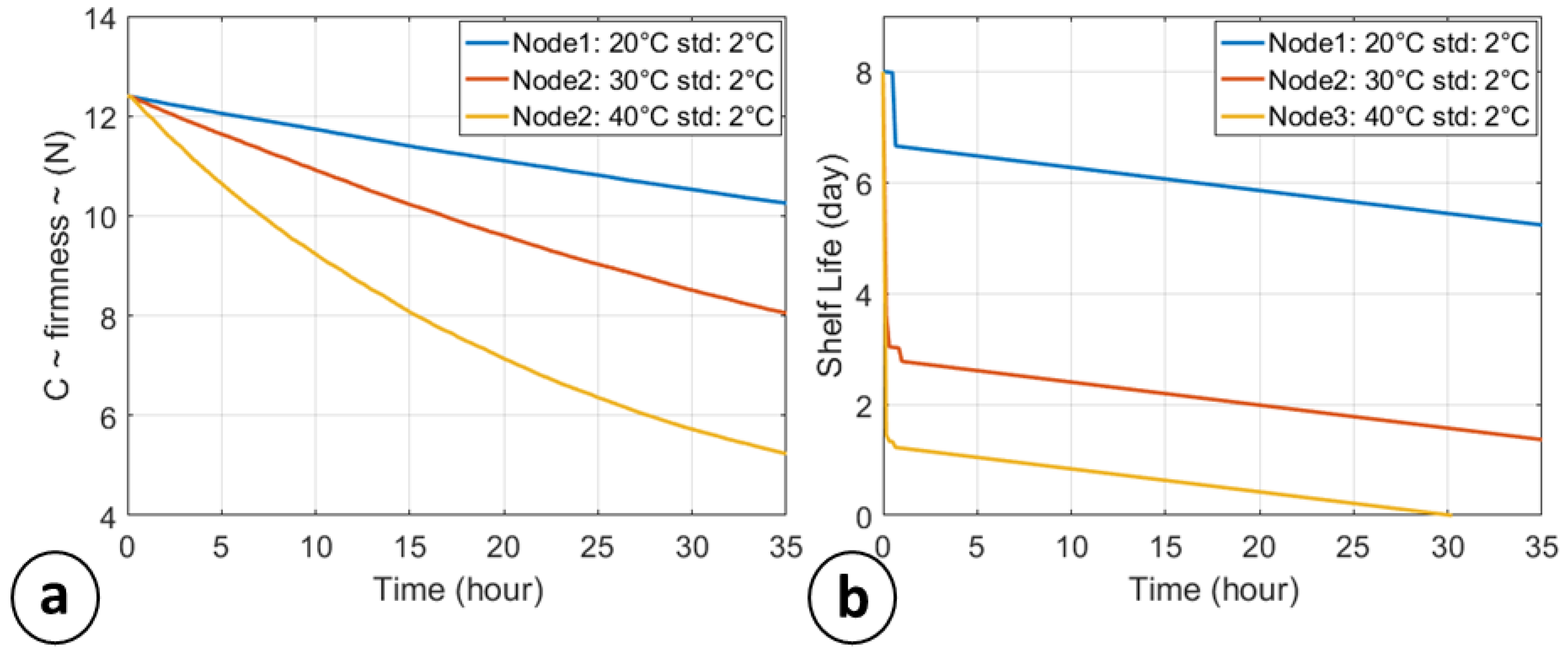
5.1. Kinetic Model Approximations Assessment
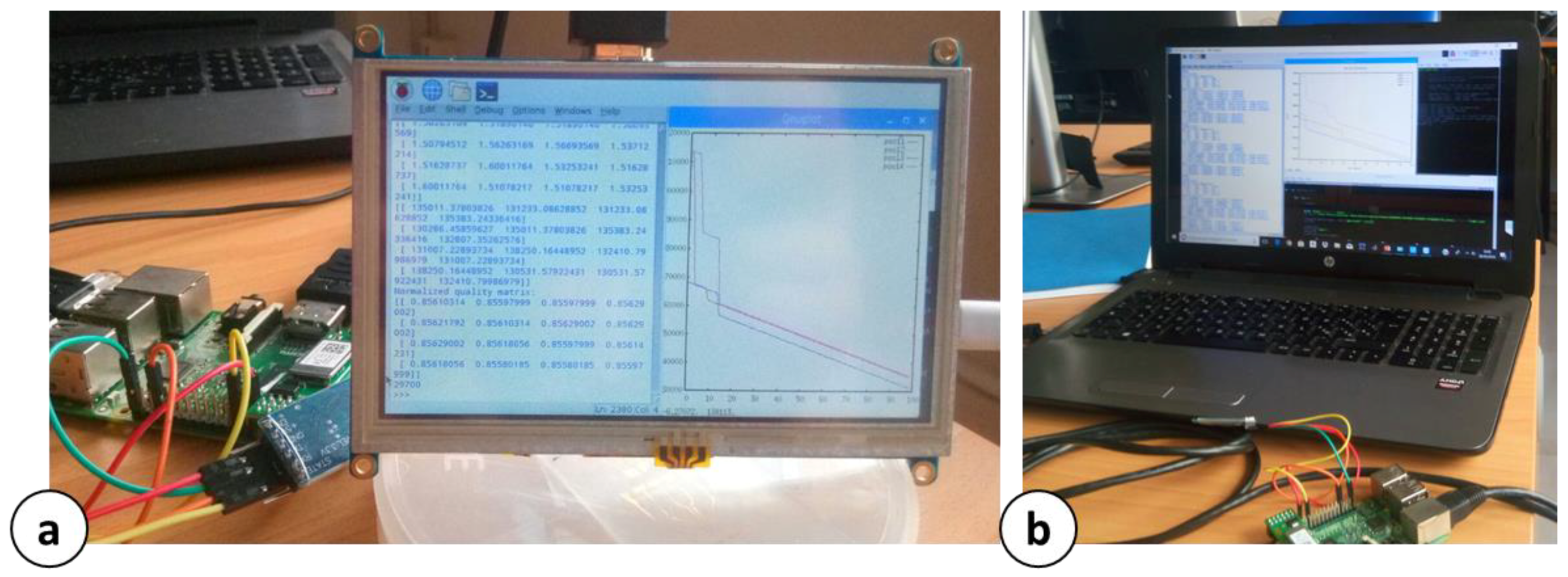
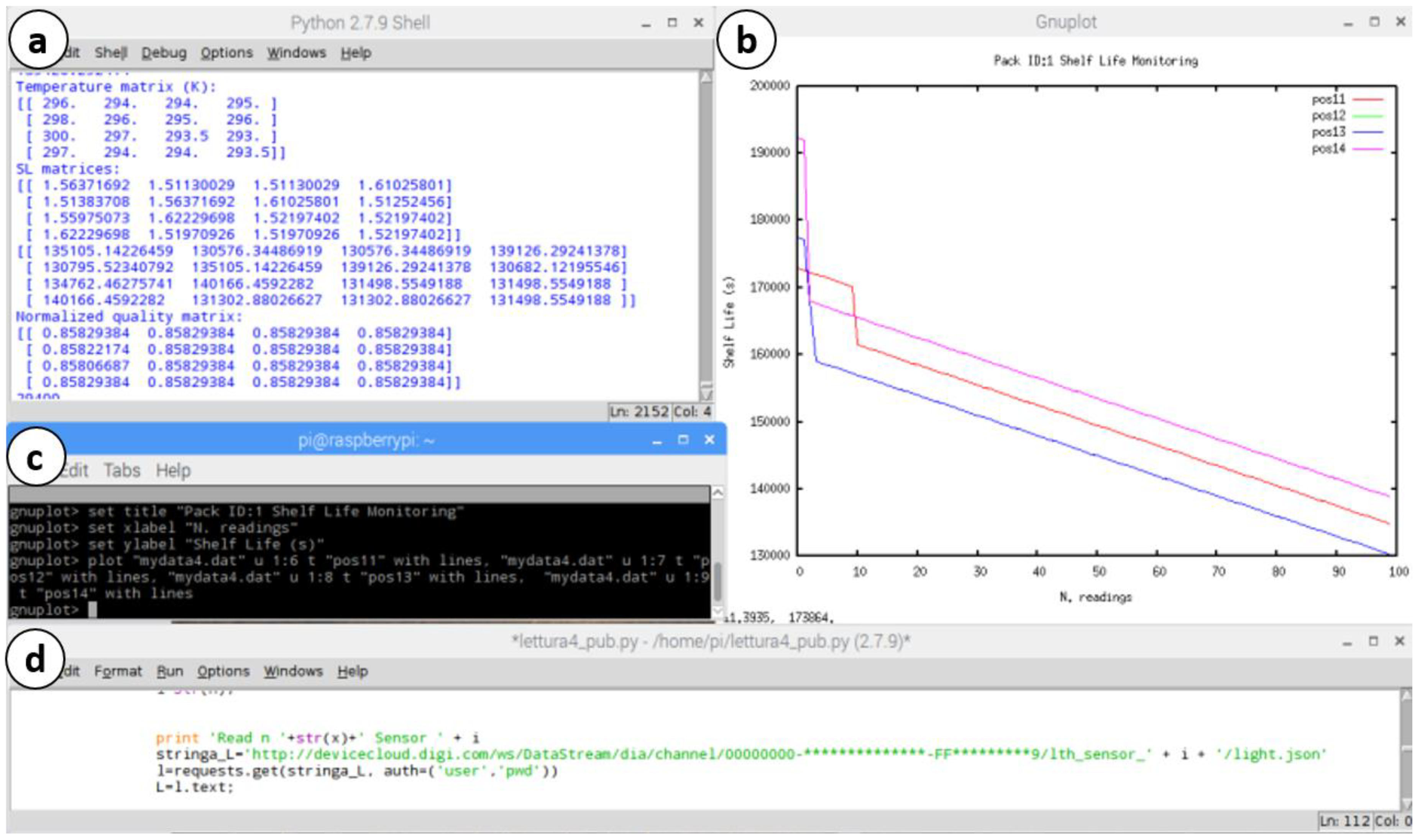
5.2. Central Control Unit Interface
- Numerical evolution panel, which reports in real-time the SL, quality (C), temperature and information about the displacement (Figure 10a)
- Chart of SL in some selected positions (e.g., (1,1), (1,2) … (1,4)), for a specific pallet (e.g., Pack ID: 1), as shown in Figure 10b.
- A gnuplot panel (Figure 10c) that allows managing the data to be plotted (SL, C, Temperature, different ID pack).
- HTTP request Login interface (Figure 10d) for the sensors data extraction, if the router (gateway) sends them in cloud. The HTTP request is enabled by compiling a set of Python coding rows [26]. For instance, to extract the temperature data the rows are:
- >>string_T='http://devicecloud.digi.com/ws/DataStream/dia/channel/*ID Connect Port*/lth_sensor_' + i + '/temperature.json'
- >>T=requests.get(string_T, auth=('user','pwd'))
5.3. Pro-Active WSN Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Parfitt, J.; Barthel, M.; Macnaughton, S. Food waste within food supply chains: Quantification and potential for change to 2050. Philos. Trans. R. Soc. B Biol. Sci. 2010, 365, 3065–3081. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization (FAO/WHO). FAO/WHO Guidance to Governments on the Application of HACCP in Small and/or Less-Developed Food Business; Food & Agriculture Organization: Quebec City, QC, Canada, 2007; ISBN 978-92-5-105596-0. [Google Scholar]
- Raab, V.; Bruckner, S.; Beierle, E.; Kampmann, Y.; Petersen, B.; Kreyenschmidt, J. Generic model for the prediction of remaining shelf life in support of cold chain management in pork and poultry supply chains. J. Chain Netw. Sci. 2008, 8, 59–73. [Google Scholar] [CrossRef]
- Dennis, J.A.B.; van Kleunen, W.A.P.; Paul, J.M.H.; Leon, K.; Mark, J.J.B. Industry: Using Dynamic WSNs in Smart Logistics for Fruits and Pharmacy. In Proceedings of the 9th ACM Conference on Embedded Networked Sensor Systems (SenSys 11), Seattle, WA, USA, 1–4 November 2011; pp. 218–231. [Google Scholar]
- Van Boekel, M.A. Kinetic modeling of food quality: A critical review. Compr. Rev. Food Sci. Food Saf. 2008, 7, 144–158. [Google Scholar] [CrossRef]
- Biccario, G.E.; Annese, V.F.; Cipriani, S.; De Venuto, D. WSN-Based near real-Time environmental monitoring for shelf life prediction through data processing to improve food safety and certification. In Proceedings of the 2014 11th International Conference on Informatics in Control., Automation and Robotics (ICINCO), Vienna, Austria, 1–3 September 2014; pp. 777–782. [Google Scholar]
- Ruiz-Garcia, L.; Barreiro, P.; Robla, J.I. Performance of ZigBee-Based wireless sensor nodes for real-Time monitoring of fruit logistics. J. Food Eng. 2008, 87, 405–415. [Google Scholar] [CrossRef]
- Wang, S.; Wan, J.; Li, D.; Zhang, C. Implementing smart factory of industrie 4.0: An outlook. Int. J. Distrib. Sens. Netw. 2016, 12, 3159805. [Google Scholar] [CrossRef]
- Hertog, M.L.; Uysal, I.; McCarthy, U.; Verlinden, B.M.; Nicolaï, B.M. Shelf life modelling for first-Expired-First-Out warehouse management. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2014, 372, 20130306. [Google Scholar] [CrossRef] [PubMed]
- Song, J. Greenhouse Monitoring and Control System Based on Zigbee Wireless Senor Network. In Proceedings of the International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 2785–2788. [Google Scholar]
- Karimi, N.; Arabhosseini, A.; Karimi, M.; Kianmehr, M.H. Web-Based monitoring system using Wireless Sensor Networks for traditional vineyards and grape drying buildings. Comput. Electron. Agric. 2018, 144, 269–283. [Google Scholar] [CrossRef]
- Purandare, H.; Ketkar, N.; Pansare, S.; Padhye, P.; Ghotkar, A. Analysis of Post-Harvest Losses: An Internet of Things and Machine Learning Approach. In Proceedings of the 2016 International Conference on Automatic Control and Dynamic Optimization Techniques (ICACDOT), Pune, India, 9–10 September 2016; pp. 222–226. [Google Scholar]
- Abad, E.; Palacio, F.; Nuin, M.; De Zarate, A.G.; Juarros, A.; Gómez, J.M.; Marco, S. RFID smart tag for traceability and cold chain monitoring of foods: Demonstration in an intercontinental fresh fish logistic Chain. J. Food Eng. 2009, 93, 394–399. [Google Scholar] [CrossRef]
- Amato, F.; Basile, F.; Carbone, C.; Chiacchio, P. An approach to control automated warehouse systems. Control Eng. Pract. 2005, 13, 1223–1241. [Google Scholar] [CrossRef]
- Rouwenhorst, B.; Reuter, B.; Stockrahm, V.; Van Houtum, G.J.; Mantel, R.J.; Zijm, W.H. Warehouse design and control: Framework and literature review. Eur. J. Oper. Res. 2000, 122, 515–533. [Google Scholar] [CrossRef]
- Jedermann, R.; Ruiz-Garcia, L.; Lang, W. Spatial temperature profiling by semi-Passive RFID loggers for perishable food transportation. Comput. Electron. Agric. 2009, 65, 145–154. [Google Scholar] [CrossRef]
- Ruiz-Garcia, L.; Lunadei, L.; Barreiro, P.; Robla, I. A review of wireless sensor technologies and applications in agriculture and food industry: State of the art and current trends. Sensors 2009, 9, 4728–4750. [Google Scholar] [CrossRef] [PubMed]
- De Venuto, D.; Annese, V.F.; Ruta, M.; Di Sciascio, E.; Vincentelli, A.L.S. Designing a cyber–physical system for fall prevention by cortico–muscular coupling detection. IEEE Des. Test 2016, 33, 66–76. [Google Scholar] [CrossRef]
- De Venuto, D.; Annese, V.F.; Mezzina, G. Remote neuro-Cognitive impairment sensing based on P300 spatio-Temporal monitoring. IEEE Sens. J. 2016, 16, 8348–8356. [Google Scholar] [CrossRef]
- Digi Products Site. Available online: https://www.digi.com/resources/documentation/digidocs/90001537/references/r_xbee_sensors.htm (accessed on 20 February 2018).
- Annese, V.F.; De Venuto, D. On-Line shelf-Life prediction in perishable goods chain through the integration of WSN technology with a 1st order kinetic model. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 605–610. [Google Scholar]
- Lana, M.M.; Tijskens, L.M.M.; Van Kooten, O. Effects of storage temperature and fruit ripening on firmness of fresh cut tomatoes. Postharvest Biol. Technol. 2005, 35, 87–95. [Google Scholar] [CrossRef]
- Wu, T.; Abbott, J.A. Firmness and force relaxation characteristics of tomatoes stored intact or as slices. Postharvest Biol. Technol. 2002, 24, 59–68. [Google Scholar] [CrossRef]
- Hong, J.H.; Gross, K.C. Maintaining quality of fresh-Cut tomato slices through modified atmosphere packaging and low temperature storage. J. Food Sci. 2001, 66, 960–965. [Google Scholar] [CrossRef]
- Rodríguez-Bermejo, J.; Barreiro, P.; Robla, J.I.; Ruiz-García, L. Thermal study of a transport container. J. Food Eng. 2007, 80, 517–527. [Google Scholar] [CrossRef]
- Annese, V.F.; De Venuto, D. Gait analysis for fall prediction using EMG triggered movement related potentials. In Proceedings of the Design & Technology of Integrated Systems in Nanoscale Era (DTIS), Naples, Italy, 21–23 April 2015; pp. 1–6. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor/Module | Specification | Value | |
|---|---|---|---|
| Temperature | Range | −18 °C to +55 °C | |
| Sensor Accuracy | ±2 °C | ||
| Relative Humidity | Range | 0 to 95% RH | |
| Sensor Accuracy | ±3.5% RH | ||
| Interchangeability | ±5% (≤59% RH), ±8% (>59% RH) | ||
| Ambient Light | Bandwidth Range 1 | 360 nm to 970 nm | |
| Luminance Range | 1–1000 lux (±20%) | ||
| Transmission Module (ZigBee) | RF Data Rate | 250 kbps | |
| Sight Range | 40–120 m | ||
| Operative frequency | ISM 2.4 GHz | ||
| Power Supply Module | Reading cycle | 1 reading/30 s | 1 reading/60 s |
| Battery Life | 1.5 years | 2.5 years | |
| Variable | Description | Value |
|---|---|---|
| kref | Rate constant of firmness decay @ 20 °C (s−1) | 2 × 10−1 |
| Ea | Activation Energy (kJ/mol) | 64.8 |
| c0 | Initial Quality factor (N) | 12.4 |
| ceq | Quality factor at the equilibrium (N) | 3 |
| Pack ID | Initial Coord. | Num. Displacements | Priority | Path |
|---|---|---|---|---|
| 1 | (1.26 m, 0 m) | 4 | 2 | (1.26 m, 0 m) → (1.26 m, 1.34 m) → (1.26 m, 2.68 m) → (0 m, 2.68 m) → (0 m, 1.34 m) |
| 2 | (2.52 m, 2.68 m) | 2 | 0 | (2.52 m, 2.68 m) → (2.52 m, 5.36 m) → (2.52 m, 6.7 m) |
| 3 | (1.26 m, 5.36 m) | 2 | 0 | (1.26 m, 5.36 m) → (0 m, 5.36 m) → (0 m, 2.68 m) |
| 4 | (3.78 m, 0 m) | 4 | 2 | (3.78 m, 0 m) → (3.78 m, 1.34 m) → (3.78 m, 2.68 m) → (3.78 m, 5.36 m) → (3.78 m, 6.7 m) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Venuto, D.; Mezzina, G. Spatio-Temporal Optimization of Perishable Goods’ Shelf Life by a Pro-Active WSN-Based Architecture. Sensors 2018, 18, 2126. https://doi.org/10.3390/s18072126
De Venuto D, Mezzina G. Spatio-Temporal Optimization of Perishable Goods’ Shelf Life by a Pro-Active WSN-Based Architecture. Sensors. 2018; 18(7):2126. https://doi.org/10.3390/s18072126
Chicago/Turabian StyleDe Venuto, Daniela, and Giovanni Mezzina. 2018. "Spatio-Temporal Optimization of Perishable Goods’ Shelf Life by a Pro-Active WSN-Based Architecture" Sensors 18, no. 7: 2126. https://doi.org/10.3390/s18072126
APA StyleDe Venuto, D., & Mezzina, G. (2018). Spatio-Temporal Optimization of Perishable Goods’ Shelf Life by a Pro-Active WSN-Based Architecture. Sensors, 18(7), 2126. https://doi.org/10.3390/s18072126