A Conformal Driving Class IV Flextensional Transducer

Abstract
:1. Introduction
2. The Design of Conformal Driving Class IV FTs
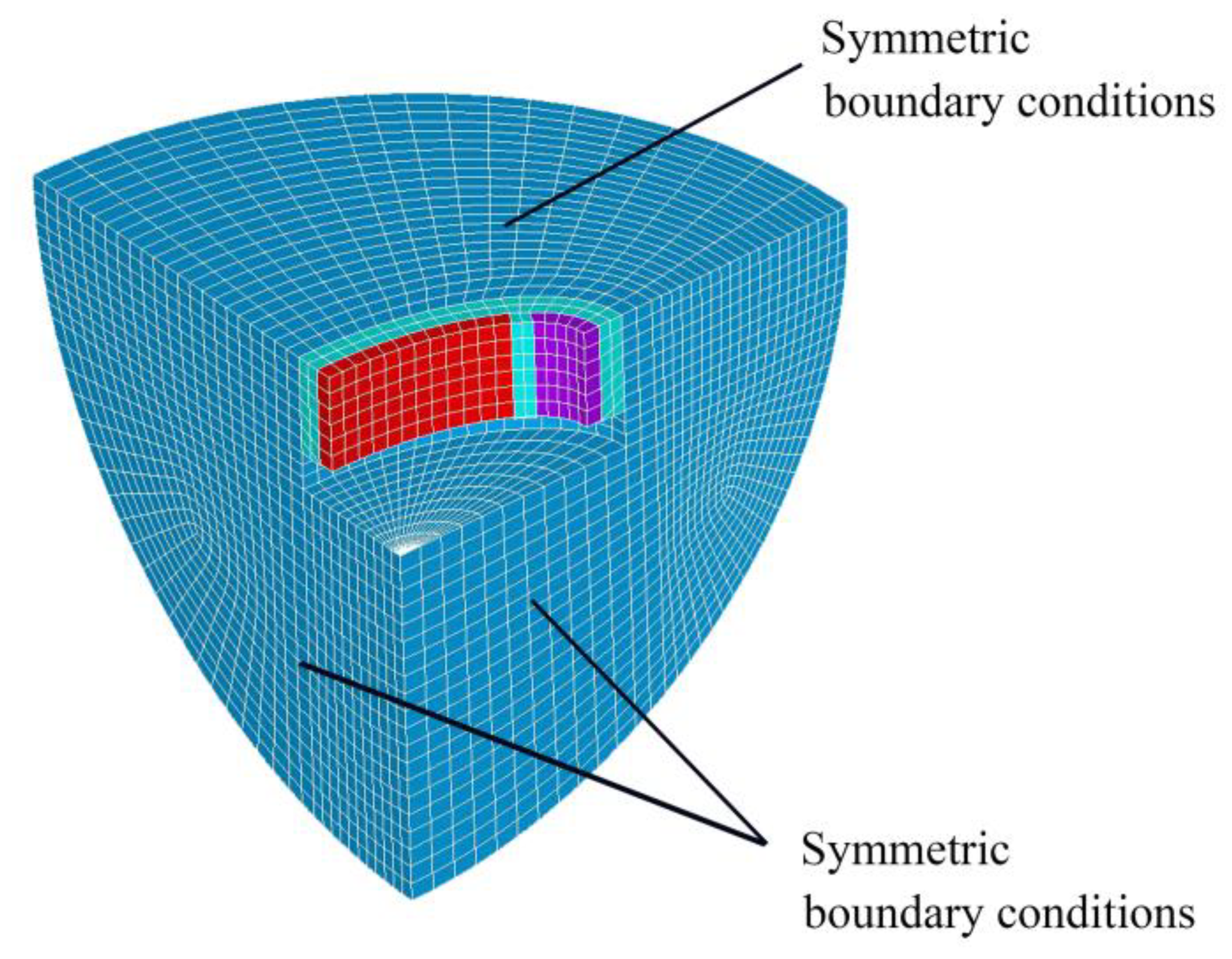
3. Finite Element Analysis of Conformal Driving Class IV FT
3.1. Modal Analysis
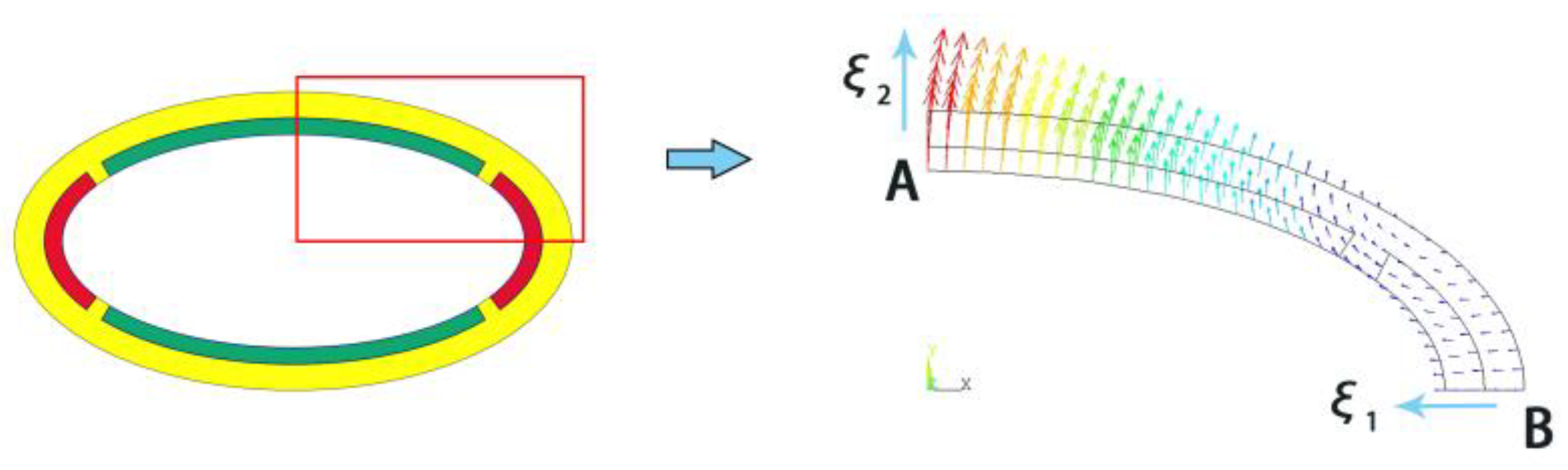
3.2. Vibrational Displacement Property Analysis
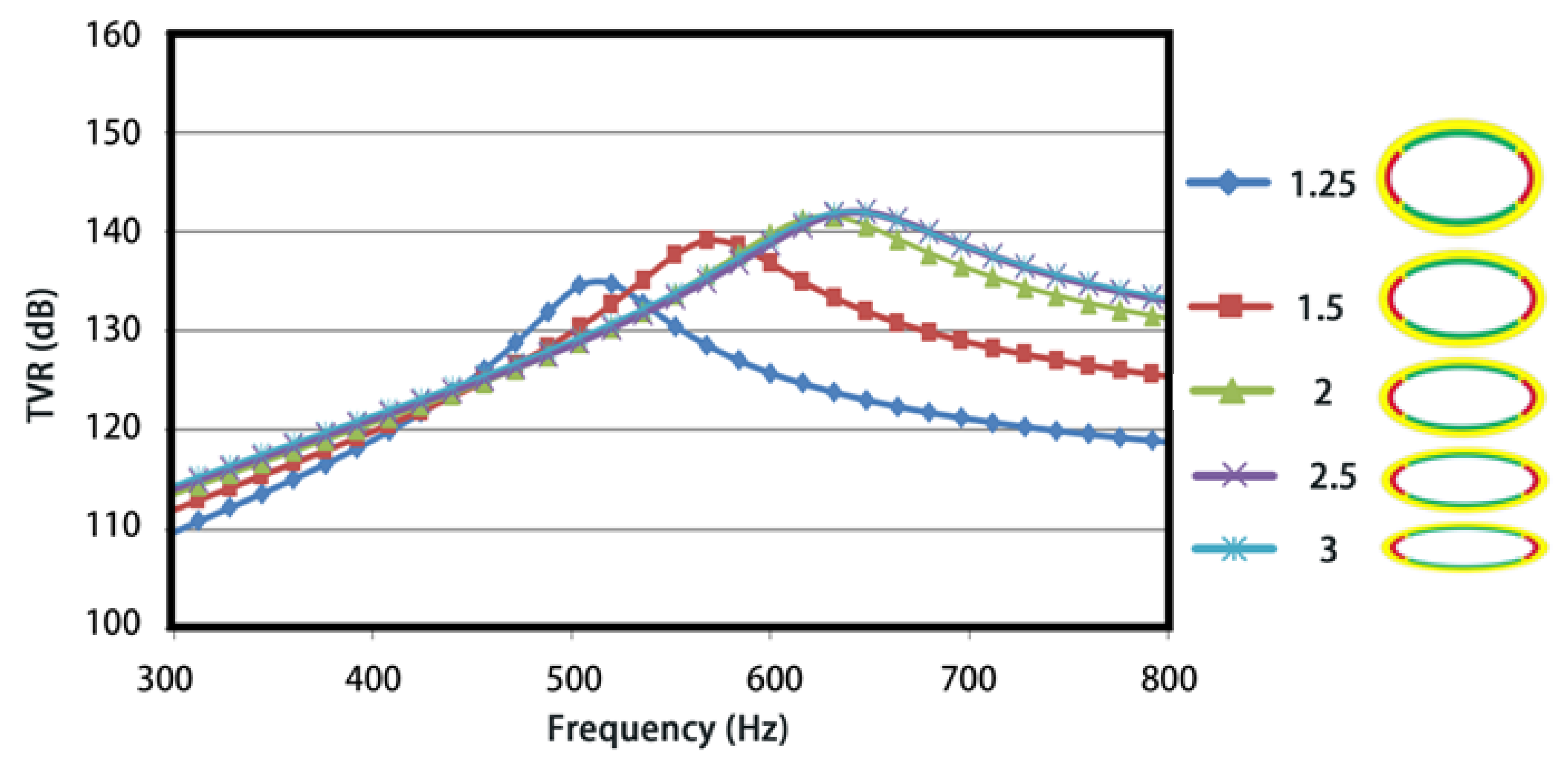
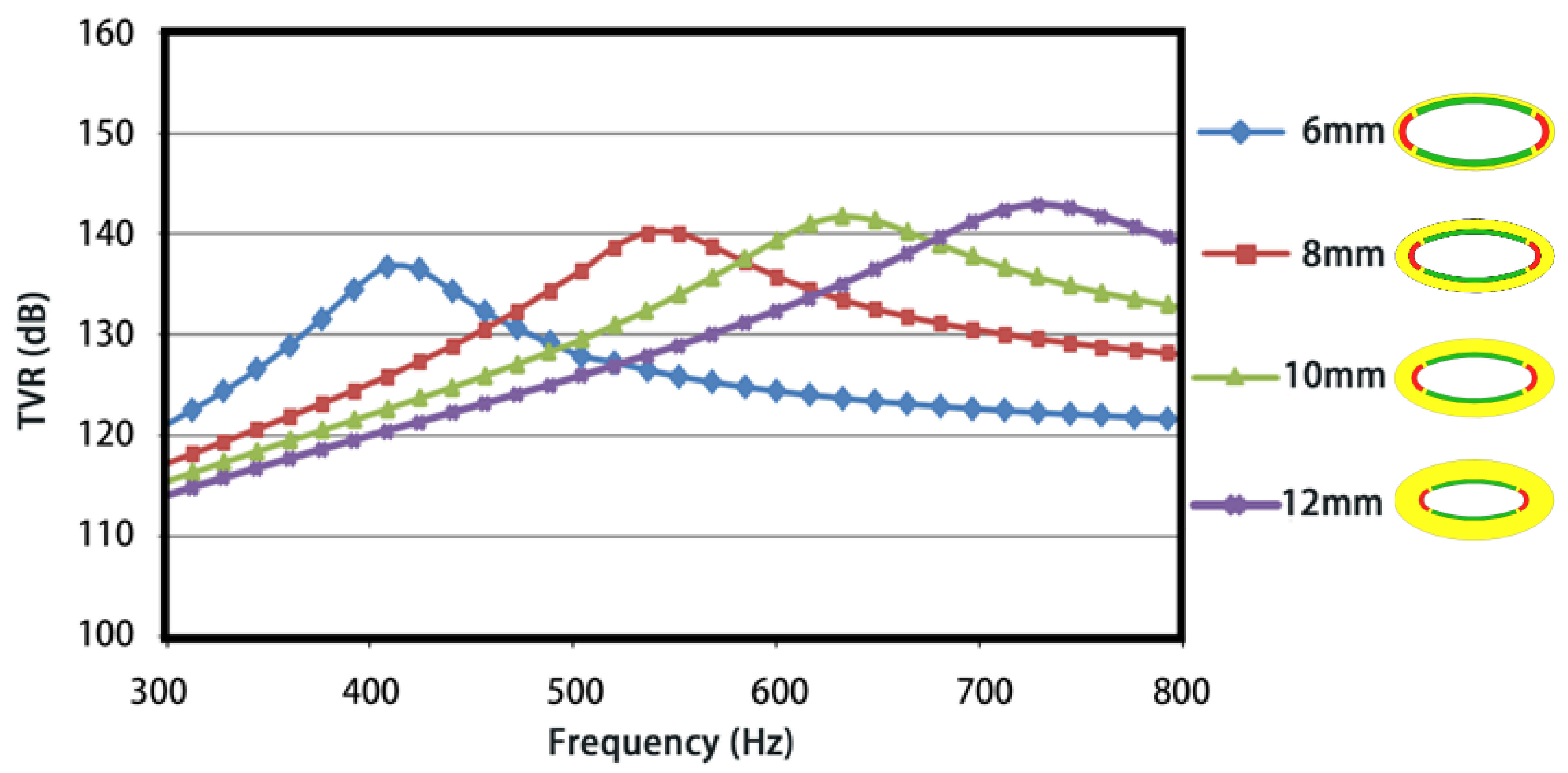
3.3. Acoustic Radiation Performance Analysis
4. Fabrication and In-Water Testing of Conformal Class IV FT
5. Conclusions
- The conformal driving is proposed as a new type of driving geometry, which can significantly lower the resonance frequency of Class IV FT and enrich its structural design diversity.
- Segmented driving and anti-phase control are utilized to the conformal driving Class IV FT by matching the vibrational shape and displacement nodes of the oval shell, which can maintain the high-power operation of the transducer in parallel to the displacement amplification of conventional FT.
- 45% decrease of resonance frequency of conformal driving Class IV FT is presented with the shell geometry unchanged both by FE predictions and experimental measurements.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C11E (1010 N/m2) | C12E (1010 N/m2) | C13E (1010 N/m2) | C33E (1010 N/m2) | C44E (1010 N/m2) | C66E (1010 N/m2) |
| 13.9 | 7.78 | 7.43 | 11.5 | 2.56 | 3.06 |
| Density (kg/m3) | (C/m2) | (C/m2) | (C/m2) | ||
| 7500 | 730 | 635 | −5.2 | 15.1 | 12.7 |
References
- Mo, X.; Zhu, H. Thirty years’ progress of underwater sound projectors in China. AIP Conf. Proc. 2012, 1495, 94–104. [Google Scholar]
- Tyler, G.D. The emergence of low-frequency active acoustics as a critical antisubmarine warfare technology. APL Tech. Dig. 1992, 13, 145–159. [Google Scholar]
- Decarpigny, J.N.; Hamonic, B.; Wilson, O.B.J. The design of low frequency underwater acoustic projectors: present status and future trends. J. Ocean. Eng. 1991, 16, 107–122. [Google Scholar] [CrossRef]
- Lew, H. Broadband active sonar: Implications and constraints. Broadband Act. Sonar Implic. Constr. 1997, 17, 472–478. [Google Scholar]
- Kim, H.; Roh, Y. Optimal Design of a Barrel Stave Flextensional Transducer. Jpn. J. Appl. Phys. 2009, 48. [Google Scholar] [CrossRef]
- Theriaulta, J.A.; Cotarasb, F.D.; Siurnac, D.L. Towed integrated active-passive sonar using a horizontal projector array sound source: Re-visiting a canadian technology for littoral applications. In Proceedings of the Conference proceedings-UDT Europe 2007, Napoli, Italy, 5–7 June 2007. [Google Scholar]
- Jones, D.F. Broadband barrel-stave flextensional transducers. J. Acoust. Soc. Am. 2000, 108, 3409. [Google Scholar] [CrossRef]
- Rolt, K.D. History of the flextensional electroacoustic transducer. J. Acoust. Soc. Am. 1990, 87, 1340–1349. [Google Scholar] [CrossRef]
- Butler, S.C.; Butler, A.L.; Butler, J.L. Directional flextensional transducer. J. Acoust. Soc. Am. 1992, 85, 529–530. [Google Scholar] [CrossRef]
- Hayes, H.C. Sound Generating and Directing Apparatus. U.S. Patent US2064911, 12 December 1936. [Google Scholar]
- Toulis, W.J. Flexural-Extensional Electro-Mechanical Transducer. U.S. Patent US3274537, 4 October 1966. [Google Scholar]
- Abbott, F.R. Broad Band Electroacoustic Transducer. U.S. Patent US2895062A, 14 July 1959. [Google Scholar]
- Merchant, H.C. Underwater Transducer Apparatus. U.S. Patent US3258738, 28 June 1966. [Google Scholar]
- Porzio, R. Flexural Cylinder Projector. U.S. Patent US7453772, 18 November 2008. [Google Scholar]
- Fleming, R.A.G.; Jones, D.F.; Reithmeier, C.G. Broadband cluster transducer for underwater acoustics applicationsa. J. Acoust. Soc. Am. 2009, 126, 2285. [Google Scholar] [CrossRef] [PubMed]
- Chen, S. Broadband flextensional transducer with major axis lengthened. Chin. J. Acoust. 2012, 36, 285–294. [Google Scholar]
- Osborn, J.W.; Wason, C.P.; Mcnary, W.S. Openwork Shell Projector. U.S. Patent US6956792, 18 November 2005. [Google Scholar]
- Porzio, R. Multiple Frequency Sonar Transducer. U.S. Patent US7535801, 19 May 2009. [Google Scholar]
- Borg, H. A new generation of broad band transducers. In Proceedings of the Undersea Defence Technology Conference, Waikiki, HI, USA, 30 October–1 November 2001. [Google Scholar]
- Engdahl, G. Driving Device for a Hydroacoustic Transmitter. U.S. Patent US6711097B1, 23 March 2004. [Google Scholar]
- Moosad, K.P.B.; Chandrashekar, G.; Joseph, M.J.; John, R. Class IV flextensional transducer with a reflector. Appl. Acoust. 2011, 72, 127–131. [Google Scholar] [CrossRef]
- Mo, X.; Terfenol-D, A. “Fish-mouth” flextensional transducer. Chin. J. Acoust. 2001, 2, 139–143. [Google Scholar]
- Butler, A.L.; Butler, J.L.; Dalton, W.L.; Rice, J.A. Multimode directional telesonar transducer. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No.00CH37158), Providence, RI, USA, 11–14 September 2000. [Google Scholar]
- Butler, S.C.; Butler, J.L.; Butler, A.L. A low-frequency directional flextensional transducer and line array. J. Acoust. Soc. Am. 1997, 100, 2730. [Google Scholar] [CrossRef]
- Hamonic, B.F.; Wilson, O.B.; Decarpigny, J.N. Power Transducers for Sonics and Ultrasonics. In Proceedings of the International Workshop, Toulon, France, 12–13 June 1990. [Google Scholar]
- Debus, J.C.; Hamonic, B.; Damiri, B. Analysis of a flextensional transducer using piece-part equivalent circuit models: Determination of the shell contribution. In Proceedings of the OCEANS ’94. ‘Oceans Engineering for Today’s Technology and Tomorrow’s Preservation.’ Proceedings, Brest, France, 13–16 September 1994. [Google Scholar]
- Haisheng Technology Company China. Available online: http://www.csic612.com (accessed on 21 May 2017).
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Length of major axis of the shell | 300 mm | Height of the piezoelectric ceramic stack | 80 mm |
| Length of minor axis of the shell | 140 mm | Thickness of the piezoelectric ceramic stack | 7 mm |
| The average thickness of the shell | 10 mm | Number of Long arc piezoelectric ceramic stack | 14 pieces |
| Shell height | 120 mm | Number of Short arc piezoelectric ceramic stack | 42 pieces |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Length of major axis of the shell | 300 mm | Shell height | 120 mm |
| Length of minor axis of the shell | 140 mm | piezoelectric ceramic stack | 182 mm (L) × 30 mm (W) × 80 mm (H) |
| The average thickness of the shell | 10 mm | Number of piezoelectric ceramic stack | 52 pieces |
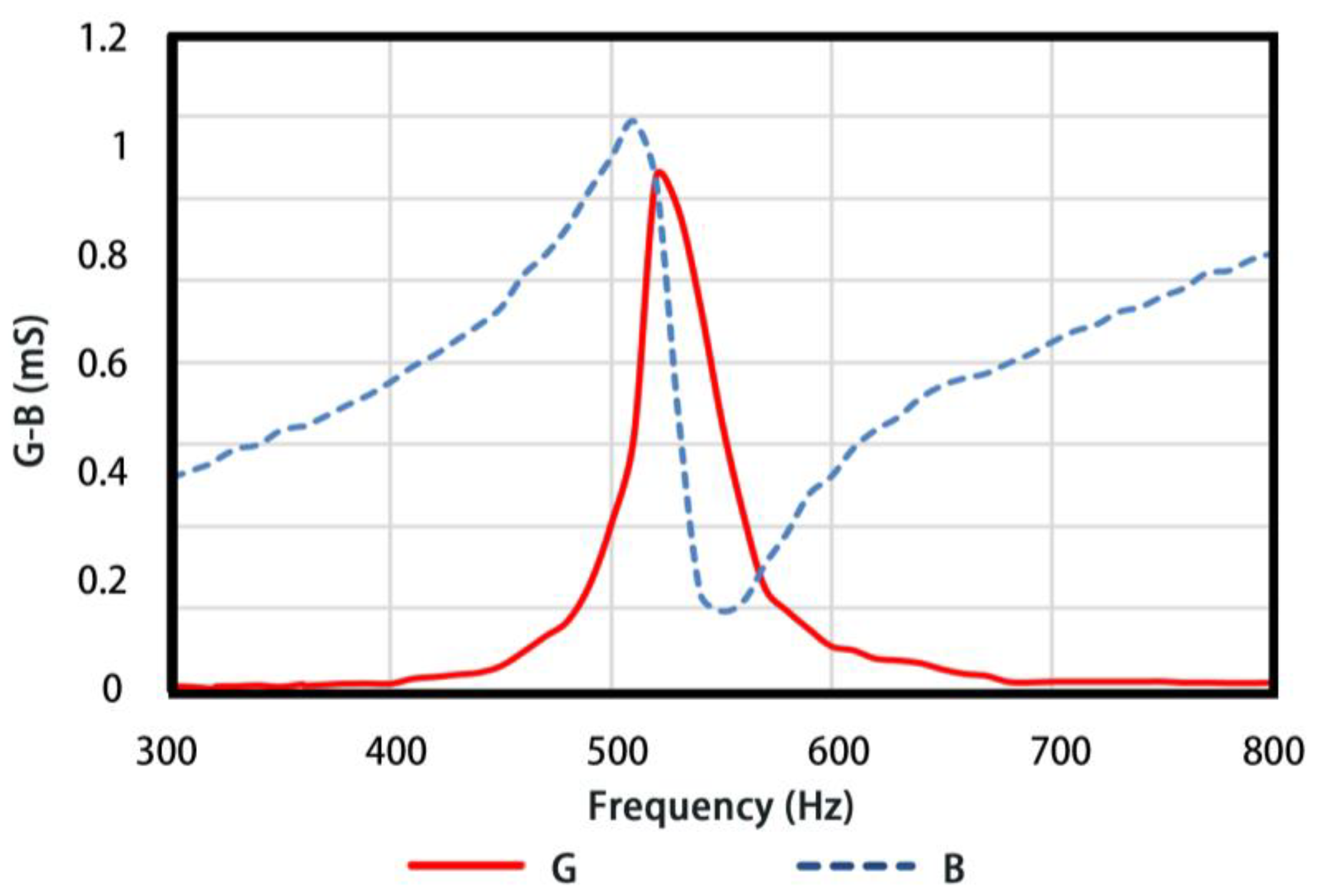
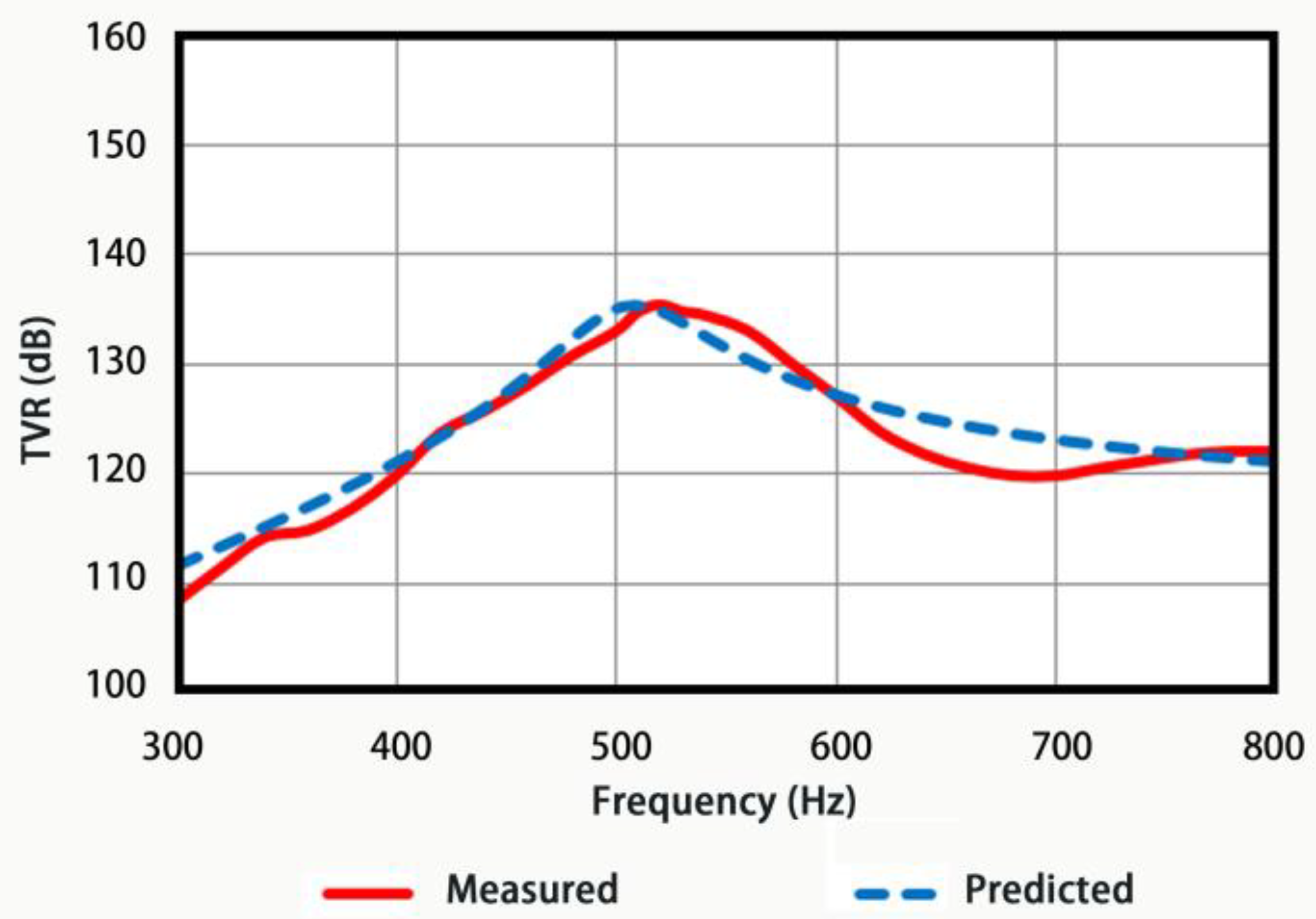
| Item | Resonance Frequency in Water/Hz | Conductance of the Resonance /mS | Maximum Value of TVR/dB |
|---|---|---|---|
| Ansys model | 510 | 0.80 | 137.5@510 Hz |
| Experimental | 520 | 0.62 | 135.4@520 Hz |
| Difference: model vs. experimental | 10 | −0.18 | −2.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, T.; Lan, Y.; Zhang, Q.; Yuan, J.; Li, S.; Lu, W. A Conformal Driving Class IV Flextensional Transducer. Sensors 2018, 18, 2102. https://doi.org/10.3390/s18072102
Zhou T, Lan Y, Zhang Q, Yuan J, Li S, Lu W. A Conformal Driving Class IV Flextensional Transducer. Sensors. 2018; 18(7):2102. https://doi.org/10.3390/s18072102
Chicago/Turabian StyleZhou, Tianfang, Yu Lan, Qicheng Zhang, Jingwen Yuan, Shichang Li, and Wei Lu. 2018. "A Conformal Driving Class IV Flextensional Transducer" Sensors 18, no. 7: 2102. https://doi.org/10.3390/s18072102
APA StyleZhou, T., Lan, Y., Zhang, Q., Yuan, J., Li, S., & Lu, W. (2018). A Conformal Driving Class IV Flextensional Transducer. Sensors, 18(7), 2102. https://doi.org/10.3390/s18072102