1. Introduction
The acoustic field is described with two separate variables: the scalar pressure and the vectorial particle velocity variables. The pressure variable is significantly simpler to measure. Therefore, a majority of the existing acoustic applications rely on omni-directional pressure sensors. However, being a scalar variable, pressure measurements at a point in space do not provide directional information regarding the acoustic field. The particle velocity has historically been neglected, despite providing directional information regarding the acoustic field. This can be attributed to the lack of affordable sensors capable of reliable measurements [
1]. However, the demand for higher performance array systems, coupled with the recent advancements in single crystal ceramic and microelectromechanical systems sensor fabrication technology, has resulted in the development of particle velocity sensors [
2,
3]. In general, particle velocity sensors are combined with pressure sensors in a single package to form an acoustic vector sensor (AVS). The use of signals collected by vector sensors can acquire more useful information of the target signals so as to lay a solid foundation for subsequent detection, identification, and positioning.
An acoustic vector sensor is a device that measures the three orthogonal components of the particle velocity, simultaneously with the pressure field at a single position in space. Vector sensors have been used for a long time in SONAR and target location due to their inherent spatial filtering capabilities [
4]. In the early nineties, a paper by D’Spain et al. [
5] received considerable attention, and during the last two decades several authors have conducted research on the signal processing theory of vector sensors ([
6,
7,
8] and references therein). In the past decade, vector sensors have been proposed in other fields like port and waterway security [
9], underwater communications [
10], geoacoustic inversion [
11,
12,
13] and geophysics [
14].
The main research focus of this paper is the method for target depth resolution, which is actually a method for target category resolution. In recent years, a large number of scholars have done relevant research work in the field of target depth resolution. Bucker [
15] realized the target localization based on the field information matching. Hinich [
16] proposed a method for depth estimation using the maximum likelihood estimator. Shang [
17] proposed an approach for target depth estimation based on the mode filtering technique. Yang adopted a method based on eigenvector decomposition technique [
18] and data-based method [
19] for depth estimation. Goldhahn [
20] proposed a method for depth classification based on waveguide invariant adaptive matched-filtering. Matched field processing (MFP) [
21,
22,
23,
24,
25,
26,
27,
28] has also been widely used in depth estimation studies. Premus proposed a method for target depth discrimination based on matched subspace detector [
29,
30] and mode-filtering technology [
31]. Researchers such as An [
32], Premus [
33] and Creamer [
34] introduced a method for target depth resolution based on the modified modal scintillation index (MMSI). Mitchell [
35] estimated the target depth by using power cepstrum techniques.
The above research is mainly based on the signals collected by pressure sensors, while there are still few studies on target depth resolution using the signals collected by vector sensors. Nevertheless, scholars at home and abroad have also achieved certain research results in this area.
Arunkumar and Anand [
36] proposed a method for source depth estimation by matching field processing methods. Hawkes and Nehorai [
37] proposed a three-dimensional localization method using distributed vector sensors. Voltz and Lu [
38] proposed a method for estimating source distance and depth using the ray back propagation theory. A method for localizing acoustic sources using an array of sensors was presented by Nehorai and Paldi [
39]. For an acoustic vector sensor lying in an emitter’s near-field, the methods for three-dimensional localization has been developed by Wong and Wu et al. [
40,
41,
42,
43]. Many scholars like Hui and Yu et al. [
44,
45,
46,
47,
48,
49] have proposed a method for target depth classification using vertical intensity signals.
In shallow water, the frequency which can excite the first two normal modes can be defined as the lower part of the Very Low Frequency (VLF: 1–100 Hz) band; and the frequency within in the higher part of VLF band can excite more than two normal modes. However, the frequency out of the VLF band is not the frequency of our research object in this paper.
The above studies on methods for target depth resolution, using signals collected by vector sensors, are mostly based on vector sensor arrays [
36,
37,
38,
39]. There are few methods for target depth resolution based on signals collected by a single vector sensor. Some of these methods offer rather high accuracies of localization and angle estimation, but have high complexity in the actual calculation [
40,
41,
42,
43]. Others are based on normal mode theory in the case of exciting only the first two normal modes [
44,
45,
46,
47,
48,
49], although these methods are of low complexity. When the frequency of research object can only excite the first two normal modes, the working band of the investigable object is greatly limited. That is, the depths of targets whose frequencies can excite more than two modes cannot be identified accurately and effectively, resulting in great threats to the safety and concealment of underwater platforms. Therefore, the study of target depth resolution at higher frequencies in the VLF band is very important and urgent. This paper proposes an improved method for target depth resolution according to the depth resolution requirements of target at the higher frequencies in the VLF band. The improved method can effectively solve the above problem so that the working band (in which targets can be classified correctly) has greatly expanded. Based on the proposed improved method in this paper, we can distinguish the aerial, surface and underwater targets so as to provide a solid guarantee for the safety and stability of underwater platforms.
4. Sea Experiment Data and Results
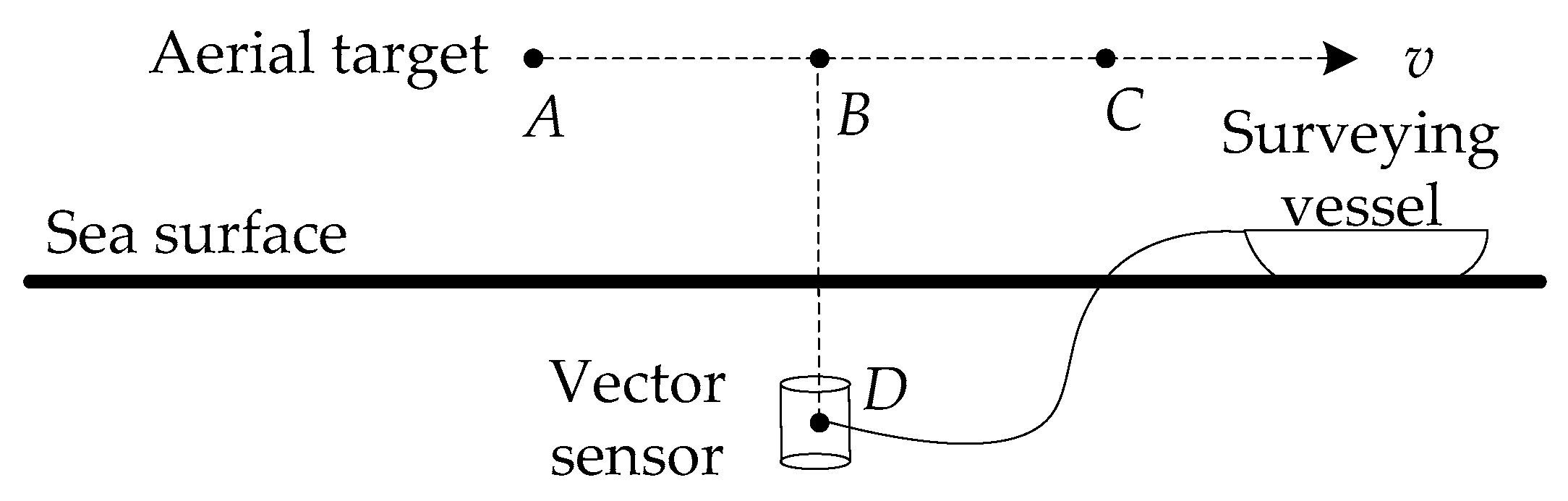
The sea experiment used a piezoelectric ceramic vector sensor, namely an accelerometer, to acquire aerial target radiated noise signal. The experiment layout is shown in
Figure 8. The three-dimensional low-frequency vector sensor is suspended underwater. Based on the collected pressure and velocity signals, the sign distribution of the lower-mode correlation quantity
is used to achieve the depth resolution of the target (at the higher frequencies in the VLF working band) so as to realize the target category resolution. The improved method proposed in this paper is mainly aimed at the target line spectrums whose frequencies can excite the first three normal modes.
The experiment condition is that the sea depth is 50 m, the receiver depth is 25 m, and the target velocity is 80 km/h. The target appeared roughly after 220 s, at some point in the vicinity of the top of the sensor, and then away. The vector sensor was at point
D. The aerial target ran from point
A to point
C, and flied at a constant velocity
v. After the aerial target was in place, it flew over the vector sensor mounted on the underwater platform and then went away [
56,
57]. After the sea experiment data is processed, the azimuth and frequency estimation are carried out. The azimuth and frequency estimation results are shown in
Figure 9. Based on the above estimation results, we can get the target parameter estimation results as listed in
Table 7. The detailed estimation method is shown in [
57].
Among them, is the base frequency of the aerial target; is the heading angle; is the target velocity; is the closest distance between source and receiver in horizontal direction; is the distance between source and receiver in vertical direction.
Figure 10 shows the time-frequency distribution in the frequency band where the first two line spectrums locate and the corresponding frequency sequence extraction results (dotted lines in black) of the first two line spectrums respectively.
Figure 10a corresponds to the band where the first line spectrum locates.
Figure 10b corresponds to the band where the second line spectrum locates. The source frequency estimation results of the first two line spectrums are 0.11 and 0.2167. The reference value is the maximum frequency of the working band selected in
Figure 9b. Based on the frequency estimation results obtained in [
56,
57] and the horizontal distance compensation results in [
57], the depth resolution of aerial targets can be achieved using (39)–(44). In [
56], the method using the line spectrum whose frequency only excites the first two normal modes to perform target depth resolution (abbreviated as method 1) is described in detail and the results are given. The improved method proposed in this paper (abbreviated as method 2) can provide the target depth resolution results using spectrum whose frequency can excite the first three normal modes, and the method in [
56] cannot use the target line spectrum whose frequency can excite the first three normal modes to perform the depth resolution.
The data in
Table 8 are the target category resolution accuracies based on the existing method of [
56] and the improved method proposed in the paper.
indicates the length of integration time. From the data in
Table 8, it can be seen that resolution accuracy is low or even incorrect by processing the line spectrum 2 based on the method 1. It means that we cannot use method 1 to process the second line spectrum for target category resolution because its application environment is limited. We can only use method 1 to process the spectrum whose frequency can only excite the first two normal modes, while the frequency of the second line spectrum can excite the first three normal modes. Using the method 2 proposed in this paper, the target category can be correctly identified by processing the second line spectrum. The appropriate integration time length can be selected to effectively improve the target category resolution accuracy.
Through the above target category resolution results in
Table 8, the target category can first be identified as an aerial or a surface target correctly. Then through the comparison of vertical distance estimation result
shown in
Table 7 with the known sensor depth
rd = 25 m, we can get that:
. Then according to the method for three-dimensional target depth (category) resolution described in
Section 2.5, we can get that:
means that the target can be identified as an aerial target when the target has already been identified as an aerial or a surface target. In conclusion, after obtaining the pressure and velocity signals, through the above methods, we can realize the three-dimensional depth resolution so as to distinguish the aerial, surface and underwater targets.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}