Experimental Demonstration of Remote and Compact Imaging Spectrometer Based on Mobile Devices


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
3. Results and Discussion
3.1. Spectral Imaging for Environment Sensing
3.2. Spectral Imaging for Human Face
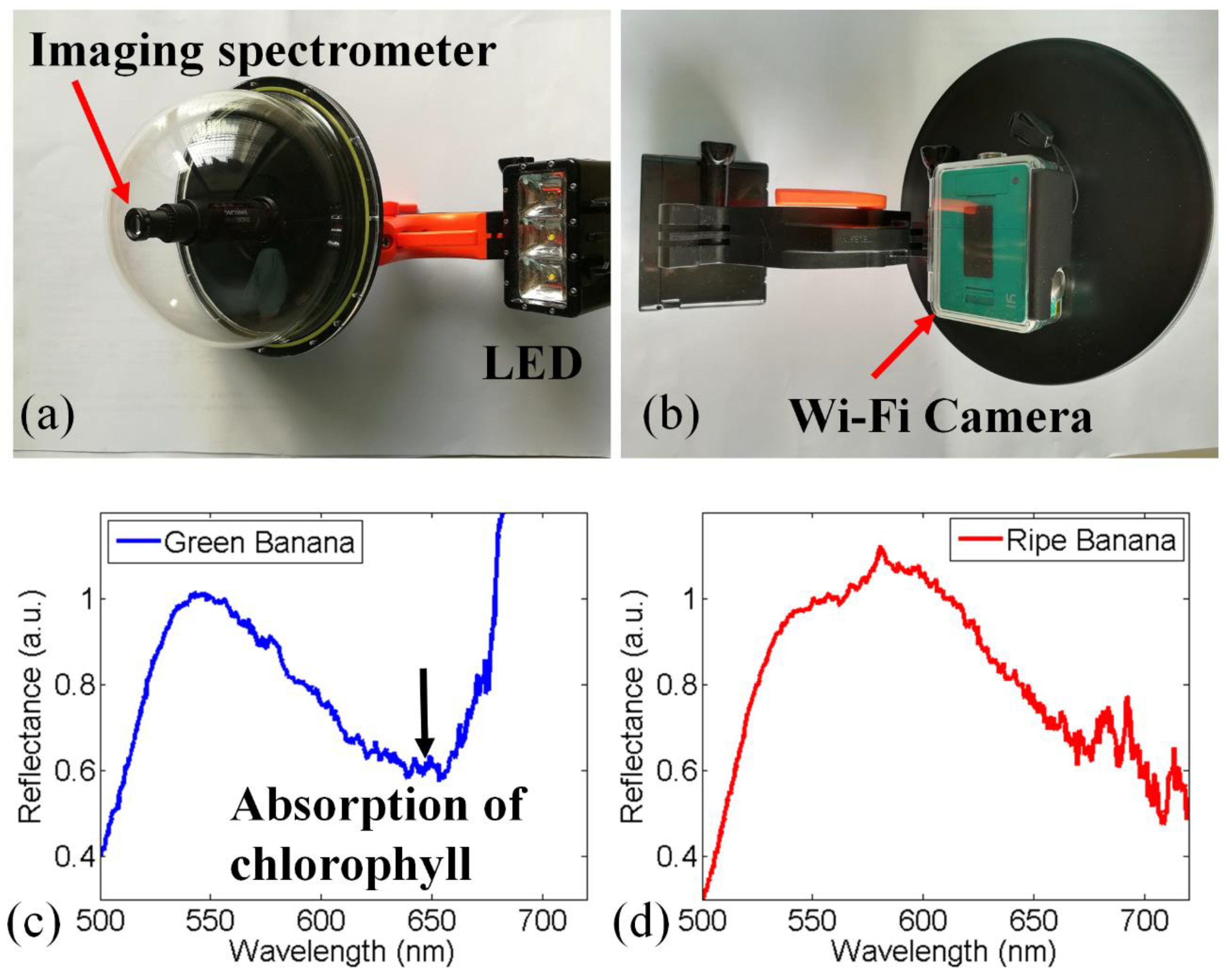
3.3. Underwater Spectral Detection for Fruit Ripeness
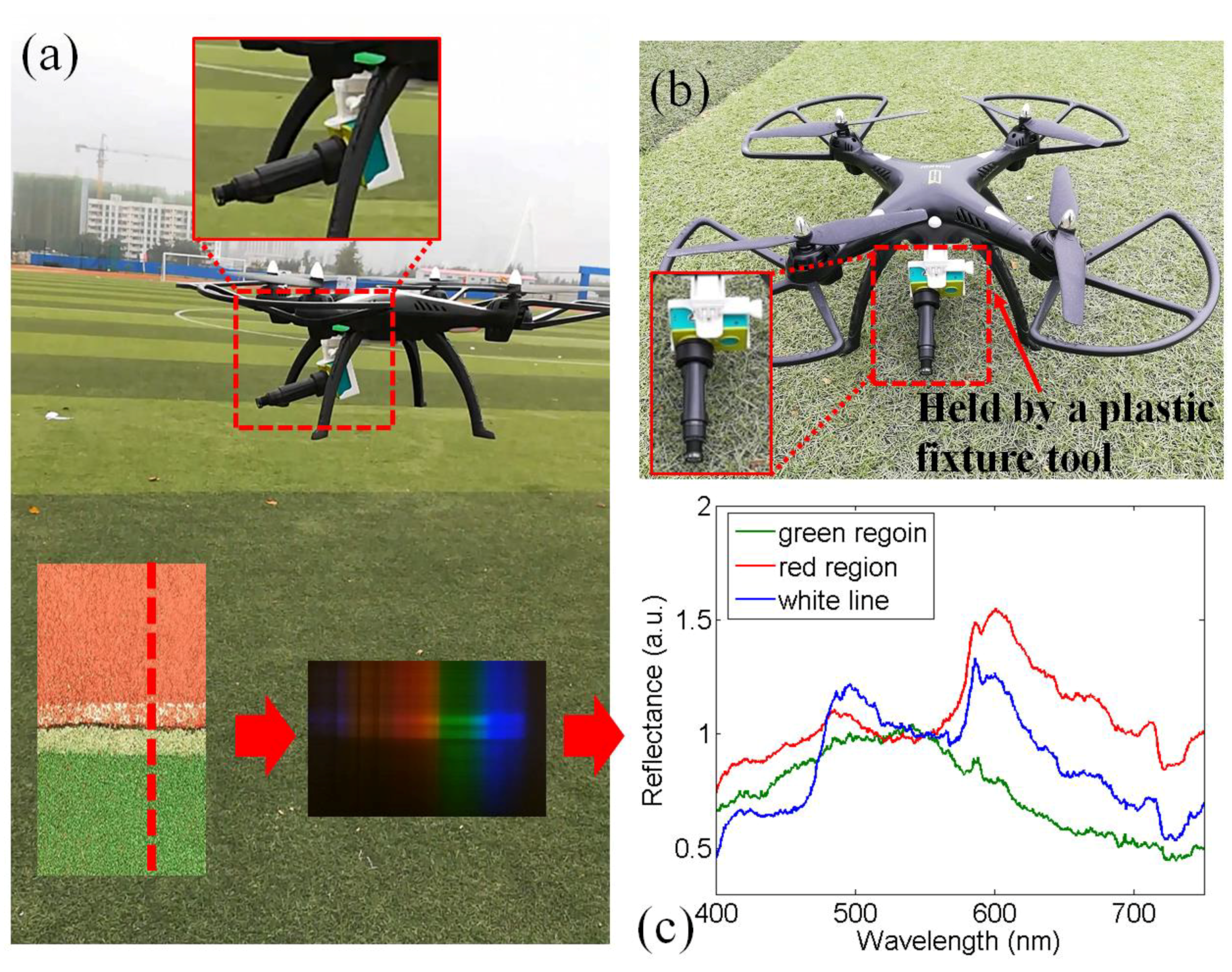
3.4. Prototype of Airborne Imaging Spectrometer based on Consumer Unmanned Aerial Vehicle (UAV)
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rissanen, A.; Saari, H.; Rainio, K.; Stuns, I.; Viherkanto, K.; Holmlund, C.; Näkki, I.; Ojanen, H. MEMS FPI-based smartphone hyperspectral imager. In Proceedings of the SPIE Commercial + Scientific Sensing and Imaging, Baltimore, MD, USA, 18–19 April 2016; Volume 9855, p. 985507. [Google Scholar]
- Cai, F.; Lu, W.; Shi, W.; He, S. A mobile device-based imaging spectrometer for environmental monitoring by attaching a lightweight small module to a commercial digital camera. Sci. Rep. 2017, 7, 15602. [Google Scholar] [CrossRef] [PubMed]
- Cai, F.; Wang, D.; Zhu, M.; He, S. Pencil-like imaging spectrometer for bio-samples sensing. Biomed. Opt. Express 2017, 8, 5427–5436. [Google Scholar] [CrossRef] [PubMed]
- Mansfield, J.R.; Gossage, K.W.; Hoyt, C.C.; Levenson, R.M. Autofluorescence removal, multiplexing, and automated analysis methods for in vivo fluorescence imaging. J. Biomed. Opt. 2005, 10, 041207. [Google Scholar] [CrossRef] [PubMed]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A Novel Methodology for Improving Plant Pest Surveillance in Vineyards and Crops Using UAV-Based Hyperspectral and Spatial Data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef] [PubMed]
- Jia, S.; Li, H.; Wang, Y.; Tong, R.; Li, Q. Hyperspectral Imaging Analysis for the Classification of Soil Types and the Determination of Soil Total Nitrogen. Sensors 2017, 17, 2252. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Leifer, I.; Hu, C. Challenges in Methane Column Retrievals from AVIRIS-NG Imagery over Spectrally Cluttered Surfaces: A Sensitivity Analysis. Remote Sens. 2017, 9, 835. [Google Scholar] [CrossRef]
- Li-Chan, E.C.Y. The applications of Raman spectroscopy in food science. Trends Food Sci. Technol. 1996, 11, 361–370. [Google Scholar] [CrossRef]
- McGonigle, A.J.; Wilkes, T.C.; Pering, T.D.; Willmott, J.R.; Cook, J.M.; Mims, F.M.; Parisi, A.V. Smartphone Spectrometers. Sensors 2018, 18, 223. [Google Scholar] [CrossRef] [PubMed]
- Long, K.D.; Yu, H.; Cunningham, B.T. Smartphone instrument for portable enzyme-linked immunosorbent assays. Biomed. Opt. Express 2014, 5, 3792–3806. [Google Scholar] [CrossRef] [PubMed]
- Jung, Y.; Kim, J.; Awofeso, O.; Kim, H.; Regnier, F.; Bae, E. Smartphone-based colorimetric analysis for detection of saliva alcohol concentration. Appl. Opt. 2015, 54, 9183–9189. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Kim, J.; Kim, M.; Youn, S.; Jang, J.E.; Je, M.; Lee, D.H.; Lee, B.; Farkas, D.L.; Hwang, J.Y. Smartphone-based Multispectral Imaging: System Development and Potential for Mobile Skin Diagnosis. Biomed. Opt. Express 2016, 7, 5294–5307. [Google Scholar] [CrossRef] [PubMed]
- Das, A.J.; Wahi, A.; Kothari, I.; Raskar, R. Ultra-portable, wireless smartphone spectrometer for rapid, non-destructive testing of fruit ripeness. Sci. Rep. 2016, 6, 32504. [Google Scholar] [CrossRef] [PubMed]
- Edwards, P.; Zhang, C.; Zhang, B.; Hong, X.; Nagarajan, V.; Yu, B.; Liu, Z. Smartphone based optical spectrometer for diffusive reflectance spectroscopic measurement of hemoglobin. Sci. Rep. 2017, 7, 12224. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Awofeso, O.; Choi, S.; Jung, Y.; Bae, E. Colorimetric analysis of saliva-alcohol test strips by smartphone-based instruments using machine-learning algorithms. Appl. Opt. 2017, 56, 84–92. [Google Scholar] [CrossRef]
- Mutlu, A.Y.; Kilic, V.; Kocakusak, G.; Bayram, A.; Horzum, N.; Solmaz, M. Smartphone-based colorimetric detection via machine learning. Analyst 2017, 142, 2434–2441. [Google Scholar] [CrossRef] [PubMed]
- Herrala, E.; Okkonen, J.T.; Hyvarinen, T.S.; Aikio, M.; Lammasniemi, J. Imaging spectrometer for process industry applications. In Proceedings of the Optics for Productivity in Manufacturing, Frankfurt, Germany, 19–24 June 1994; Volume 2248, pp. 33–40. [Google Scholar]
- Sansonetti, C.J.; Salit, M.L.; Reader, J. Wavelengths of spectral lines in mercury pencil lamps. Appl. Opt. 1996, 35, 74–77. [Google Scholar] [CrossRef] [PubMed]
- Roy, D.P.; Li, Z.; Zhang, H.K. Adjustment of Sentinel-2 Multi-Spectral Instrument (MSI) Red-Edge Band Reflectance to Nadir BRDF Adjusted Reflectance (NBAR) and Quantification of Red-Edge Band BRDF Effects. Remote Sens. 2017, 9, 1325. [Google Scholar]
- Chin, M.; Freniere, B.; Lo, Y.; Saleeby, J.; Baker, S.; Strom, H.; Ignotz, R.; Lalikos, J.; Fitzgerald, T. Hyperspectral imaging for early detection of oxygenation and perfusion changes in irradiated skin. J. Biomed. Opt. 2012, 17, 026010. [Google Scholar] [CrossRef] [PubMed]
- Sigernes, F.; Syrjäsuo, M.; Storvold, R.; Fortuna, J.; Grøtte, M.E.; Johansen, T.A. Do it yourself hyperspectral imager for handheld to airborne operations. Opt. Express 2018, 26, 6021–6035. [Google Scholar] [CrossRef] [PubMed]
- Keller, P.; Schmidt, A.; Wittbrodt, J.; Stelzer, E. Reconstruction of zebrafish early embryonic development by scanned light sheet microscopy. Science 2008, 322, 1065–1069. [Google Scholar] [CrossRef] [PubMed]
- Gao, L. Optimization of the excitation light sheet in selective plane illumination microscopy. Biomed. Opt. Express 2015, 6, 881–890. [Google Scholar] [CrossRef] [PubMed]
- Cai, F.; Chen, J.; Zhou, C.; Zhu, X.; He, S. Exploratory Study on Light-Sheet Based Three-Dimensional Surface Topography. Prog. Electromagn. Res. 2018, 161, 11–18. [Google Scholar]
- Jahr, W.; Schmid, B.; Schmied, C.; Fahrbach, F.; Huisken, J. Hyperspectral light sheet microscopy. Nat. Commun. 2015, 6, 7990. [Google Scholar] [CrossRef] [PubMed]
- Mei, L.; Brydegaard, M. Continuous-wave differential absorption lidar. Laser Photonics Rev. 2015, 9, 629–636. [Google Scholar] [CrossRef]
- Zhao, G.; Ljungholm, M.; Malmqvist, E.; Bianco, G.; Hansson, L.A.; Svanberg, S.; Brydegaard, M. Inelastic hyperspectral lidar for profiling aquatic ecosystems. Laser Photonics Rev. 2016, 10, 807–813. [Google Scholar] [CrossRef]
- Gao, F.; Li, J.; Lin, H.; He, S. Oil pollution discrimination by an inelastic hyperspectral Scheimpflug lidar system. Opt. Express 2017, 25, 25515–25522. [Google Scholar] [CrossRef] [PubMed]





© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Cai, F.; He, R.; He, S. Experimental Demonstration of Remote and Compact Imaging Spectrometer Based on Mobile Devices. Sensors 2018, 18, 1989. https://doi.org/10.3390/s18071989
Chen J, Cai F, He R, He S. Experimental Demonstration of Remote and Compact Imaging Spectrometer Based on Mobile Devices. Sensors. 2018; 18(7):1989. https://doi.org/10.3390/s18071989
Chicago/Turabian StyleChen, Jie, Fuhong Cai, Rongxiao He, and Sailing He. 2018. "Experimental Demonstration of Remote and Compact Imaging Spectrometer Based on Mobile Devices" Sensors 18, no. 7: 1989. https://doi.org/10.3390/s18071989
APA StyleChen, J., Cai, F., He, R., & He, S. (2018). Experimental Demonstration of Remote and Compact Imaging Spectrometer Based on Mobile Devices. Sensors, 18(7), 1989. https://doi.org/10.3390/s18071989