Smart Road Traffic Accidents Reduction Strategy Based on Intelligent Transportation Systems (TARS)

 , , ,
, , , 
Abstract
1. Introduction
- (1)
- The design of a new protocol for accident prevention and, hence, reduction.
- (2)
- To forecast/guess the probability of the occurrence of an accident in advance before it occurs.
- (3)
- To re-route vehicle traffic to prevent traffic jams on the road that may cause accidents.
- (4)
- To maintain traffic flow efficiently.
- (5)
- To assist drivers to reach a destination on time.
- (6)
- To reduce safety messages broadcasting in order to avoid a broadcasting storm and network congestion.
- (7)
- To minimize the delay in re-routing of traffic to other available paths.
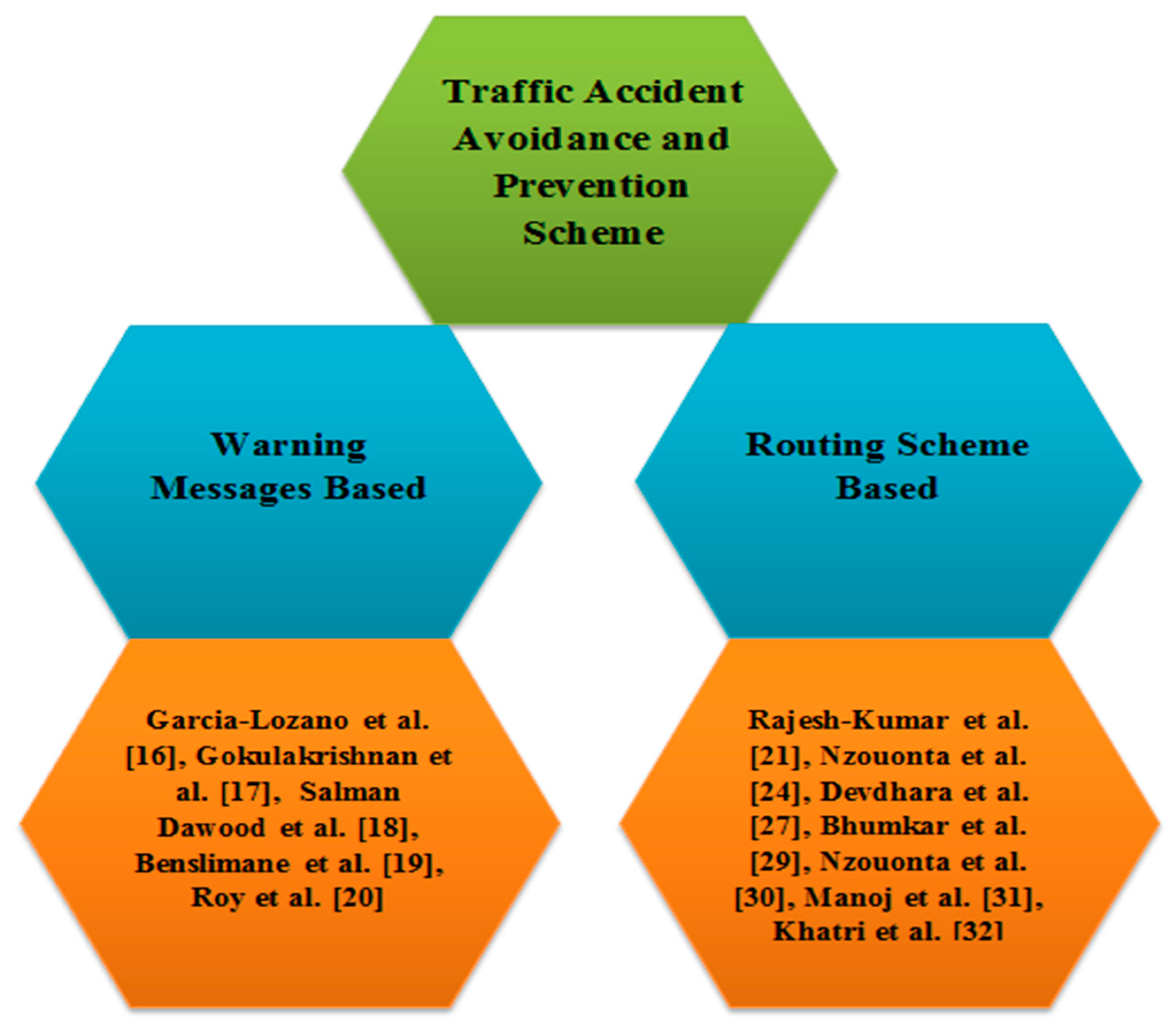
2. Literature Review
2.1. Traffic Accident Avoidance and Prevention Based on Warning Messages
2.2. Traffic Accident Avoidance and Prevention Based on Routing Scheme
2.3. Discussion
3. Smart Road Traffic Accidents Reduction Strategy
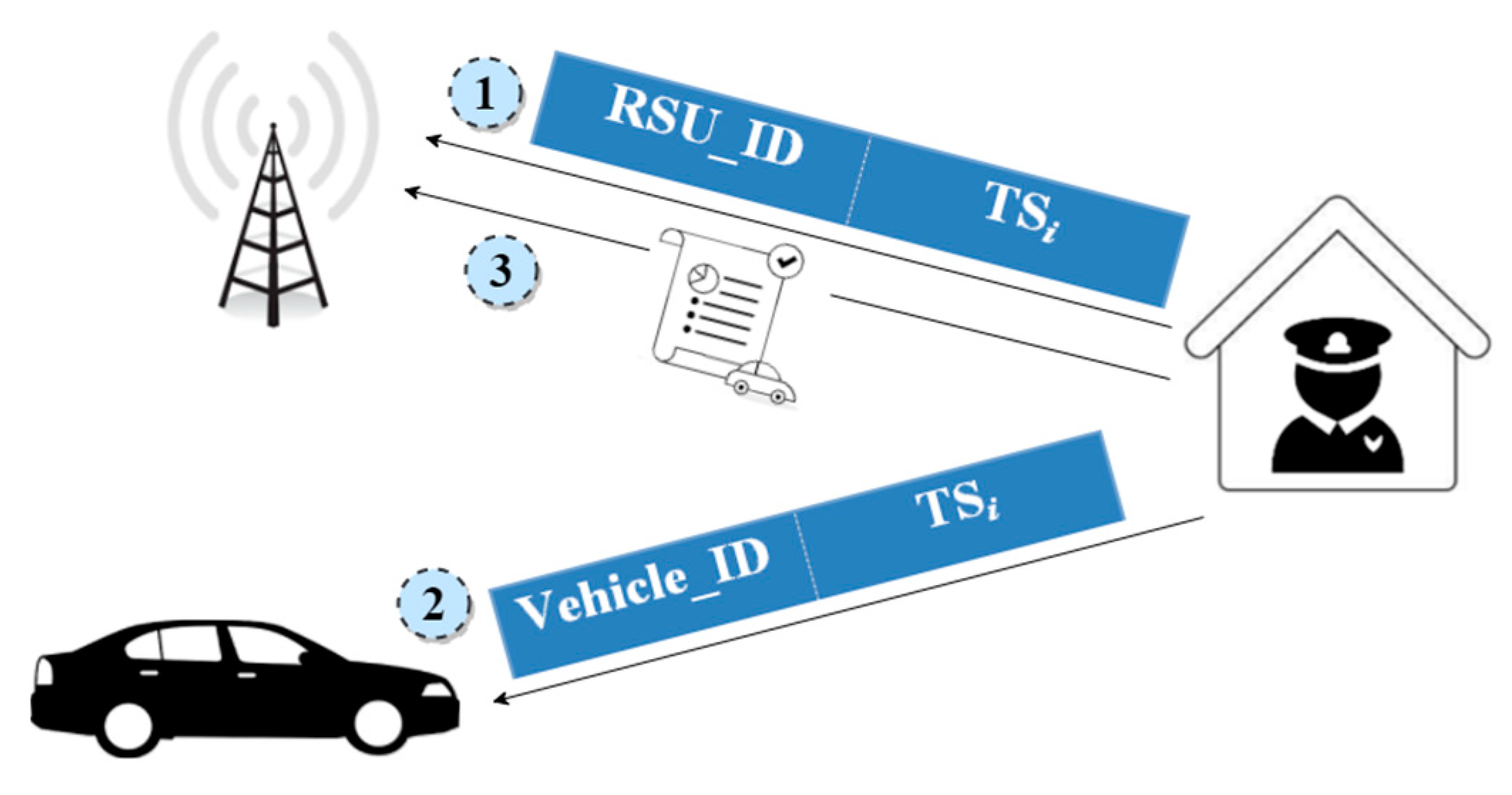
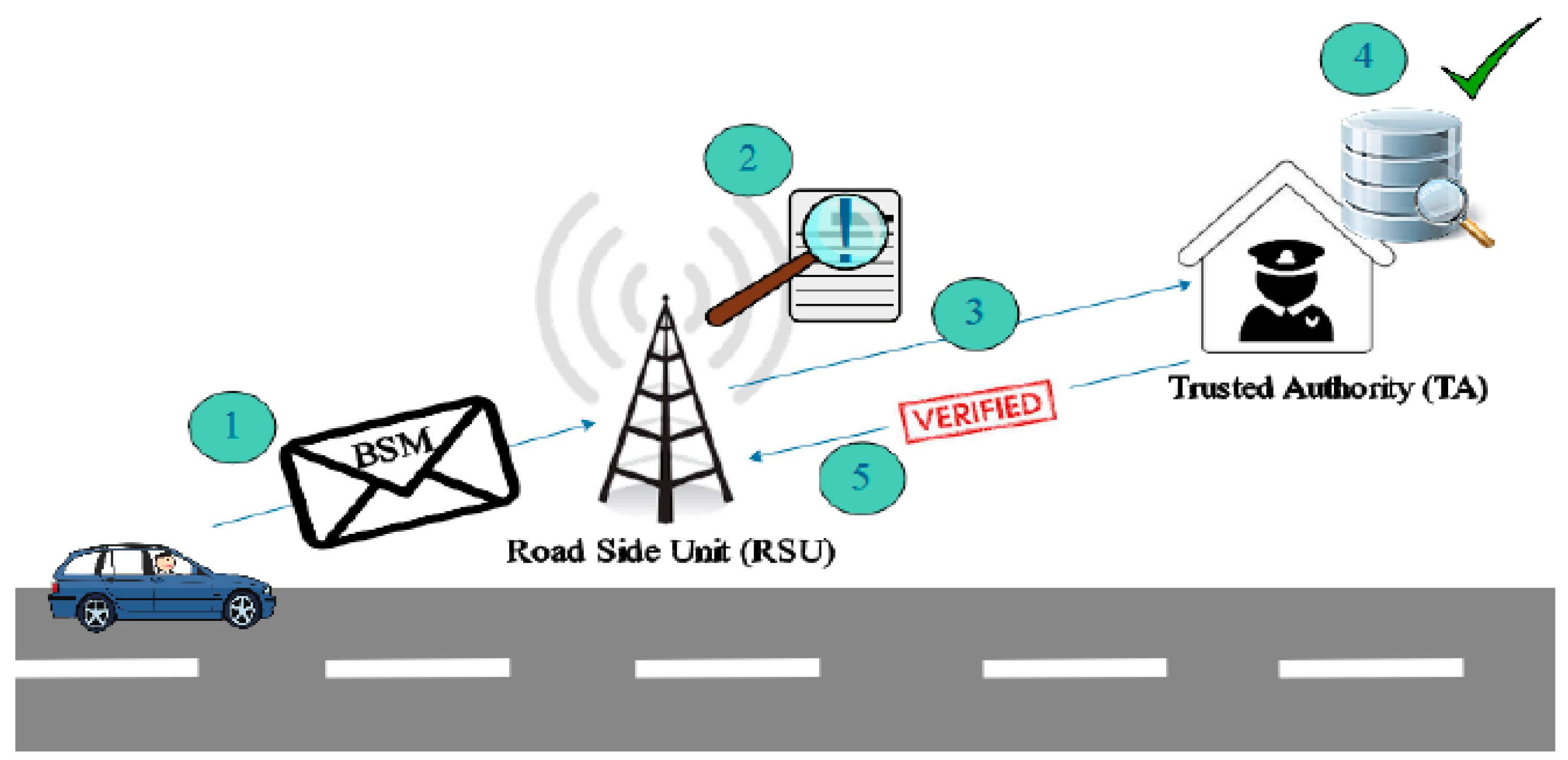
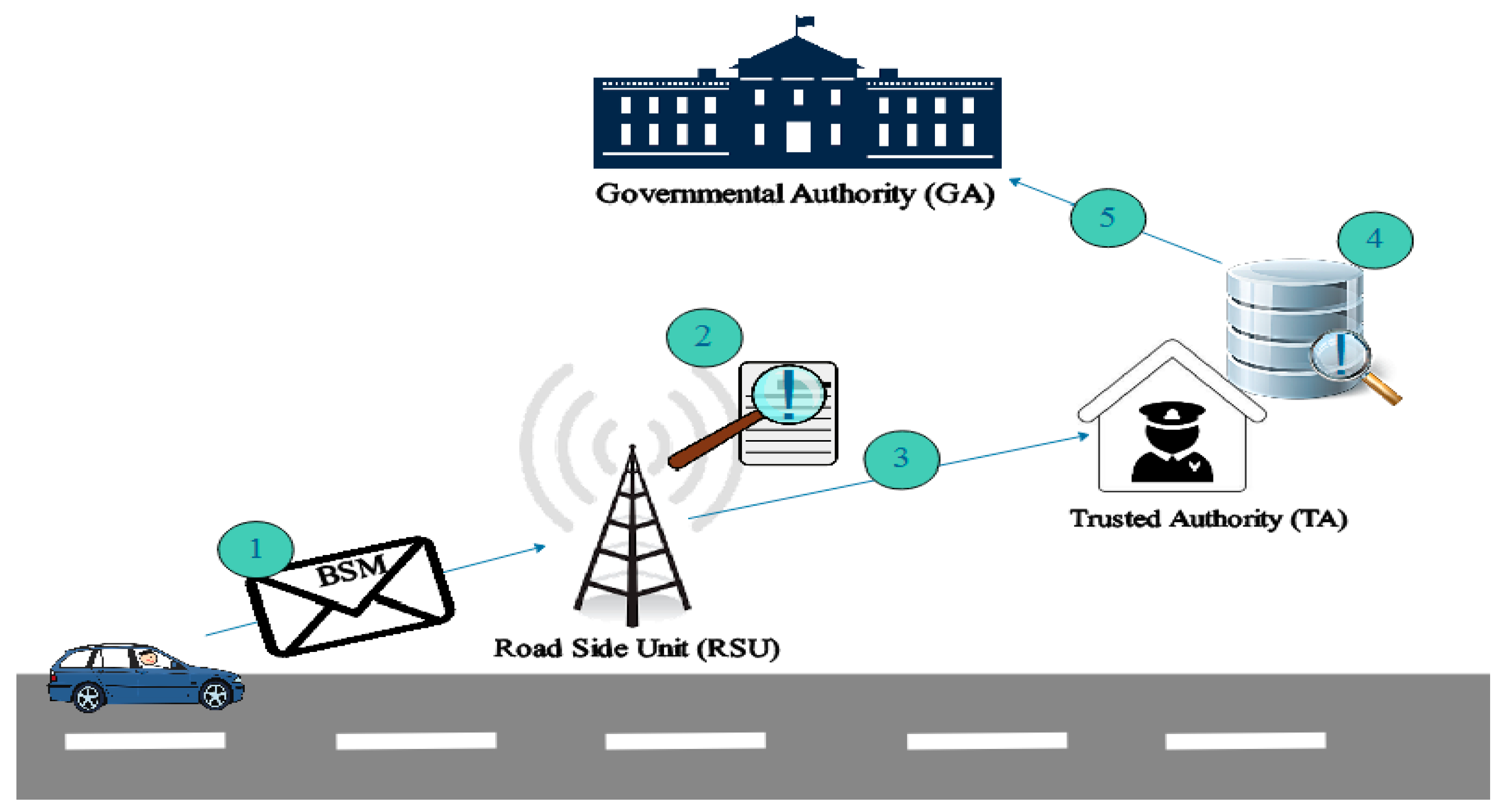
3.1. Entities
- (1)
- Smart Vehicles
- (2)
- Road Side Units (RSUs)
- (3)
- Trusted Authority (TA)
- (4)
- Governmental Authority (GA).
3.2. Assumptions
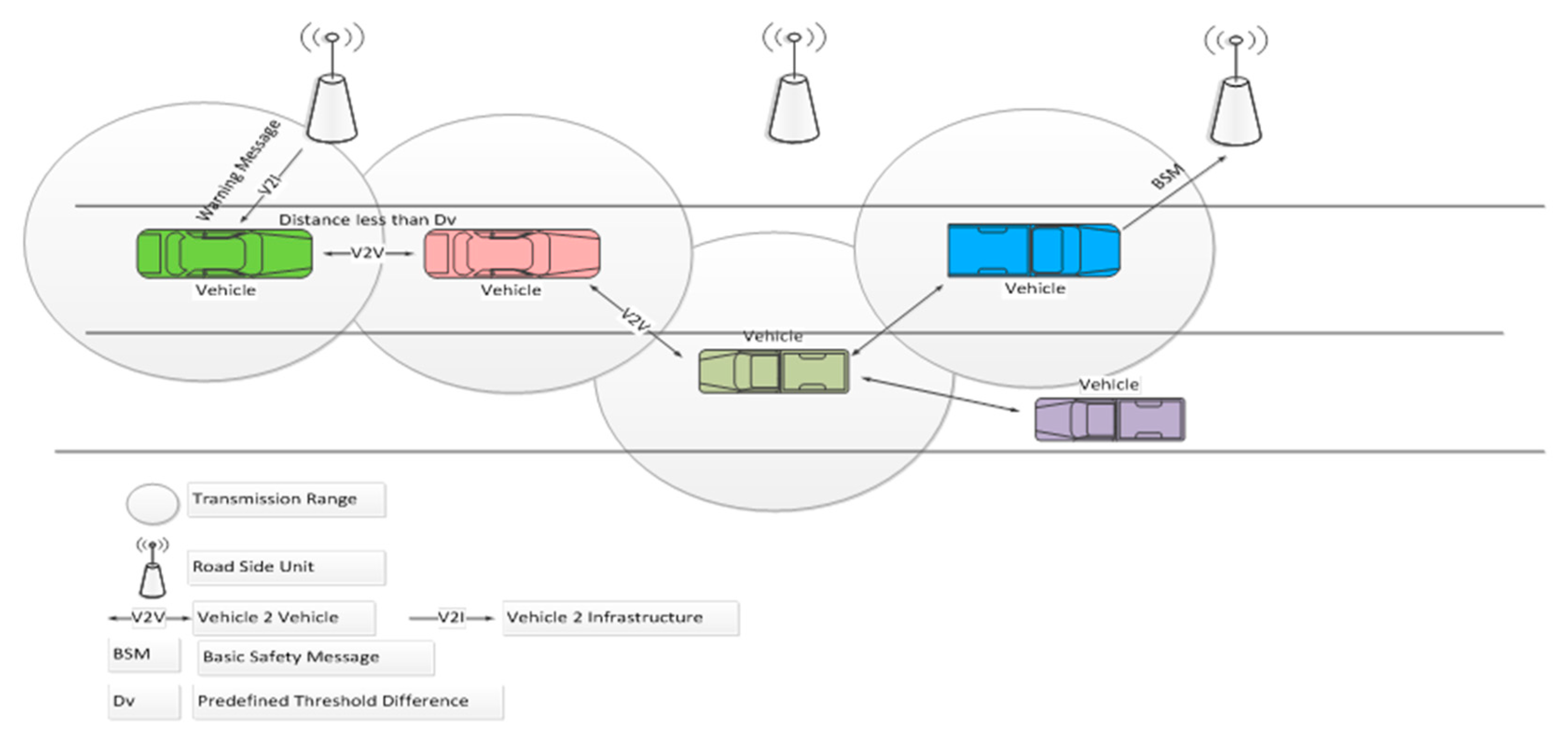
- All vehicles must be equipped or armed with a Global Positioning System (GPS) in order to obtain the exact location so that it can be used in the Basic Safety Message (BSM).
- The RSU is an uncompromised entity. An uncompromised entity means that it can neither be effected by any attack nor can its record can be modified.
- All vehicles and RSUs are registered with the TA.
- The Vehicle to Infrastructure (V2I) communication mode is considered.
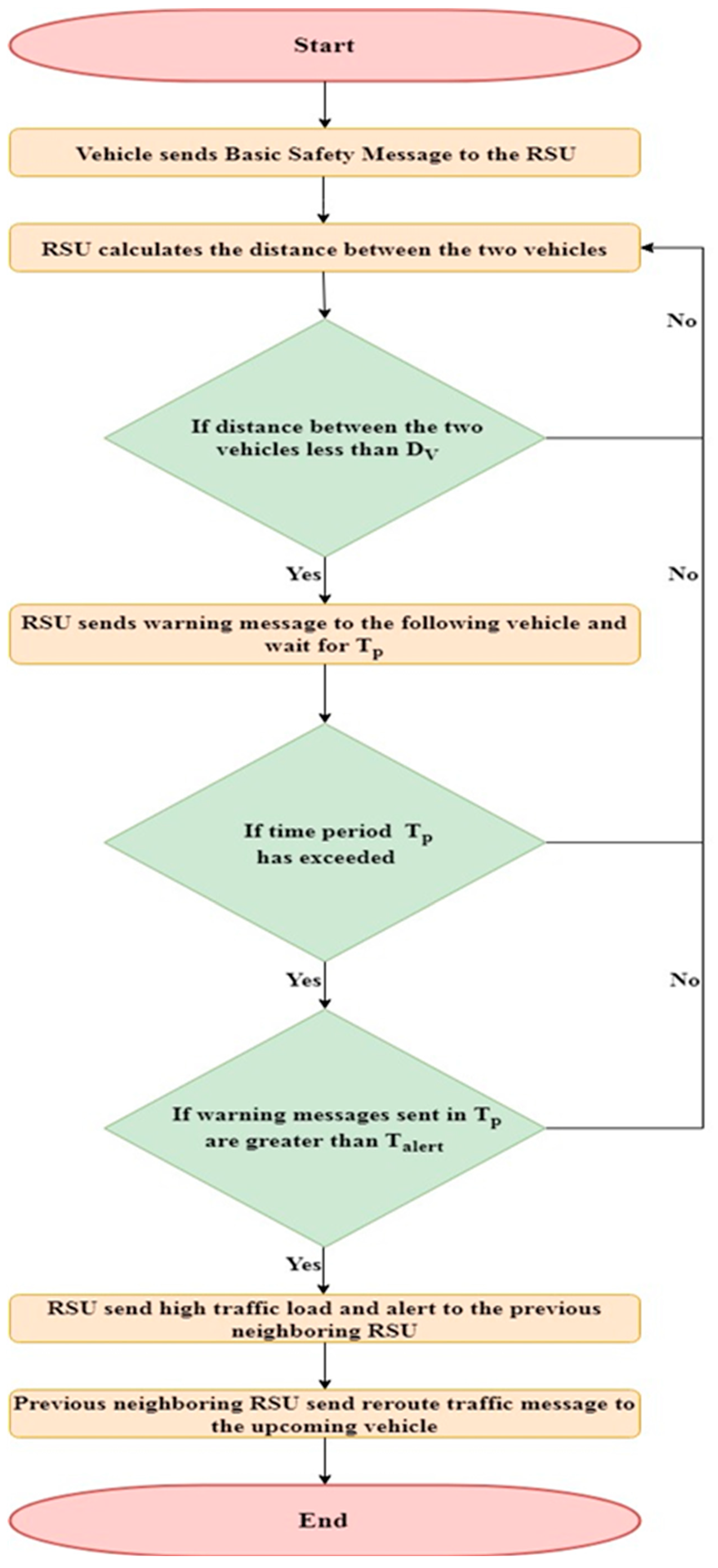
3.3. Phases of Traffic Accidents Reduction Strategy (TARS)
| Algorithm 1: Traffic Congestion Avoidance Algorithm |
 |
3.4. Safety Distance Calculation Method
4. Performance Evaluation
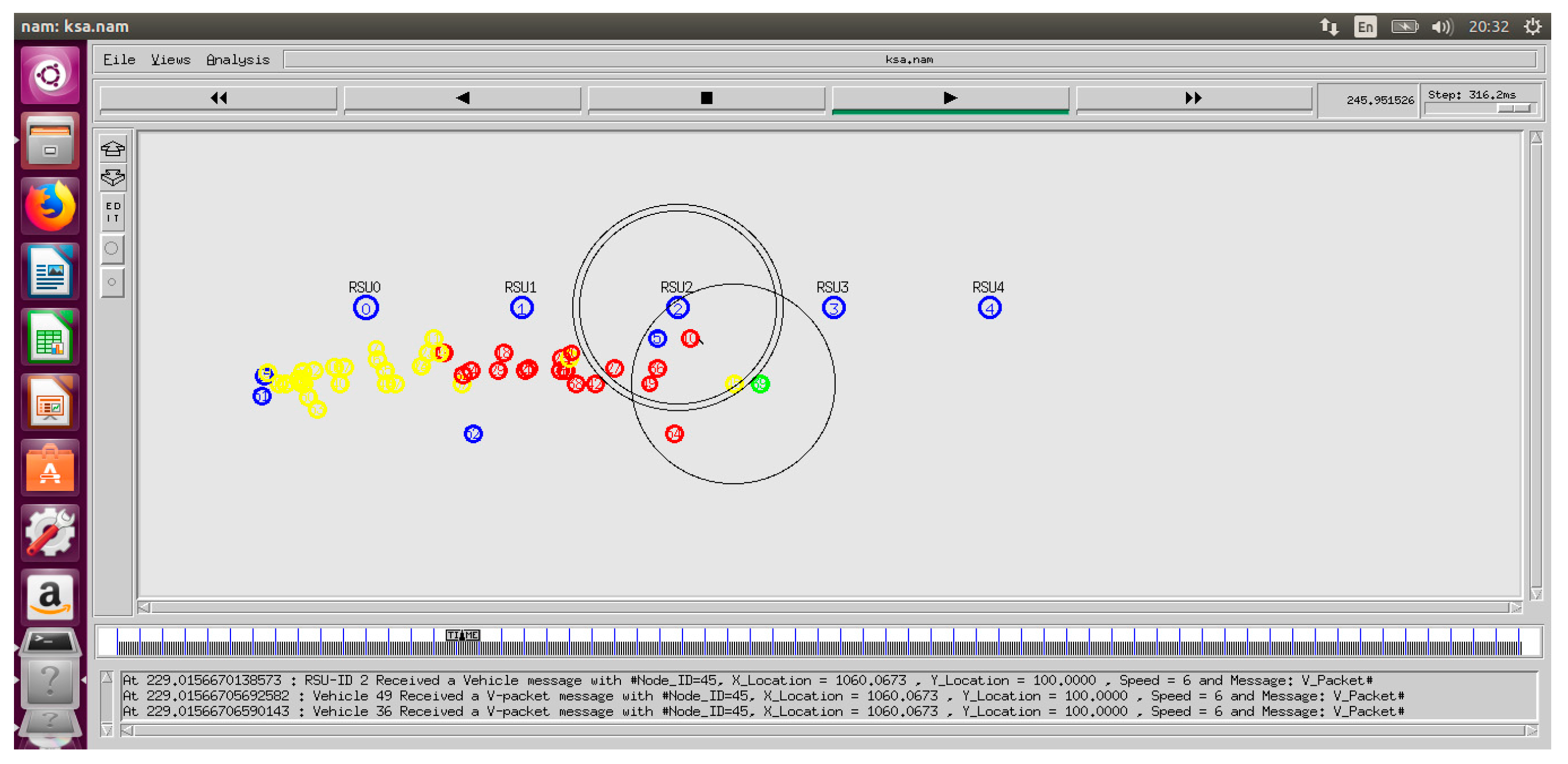
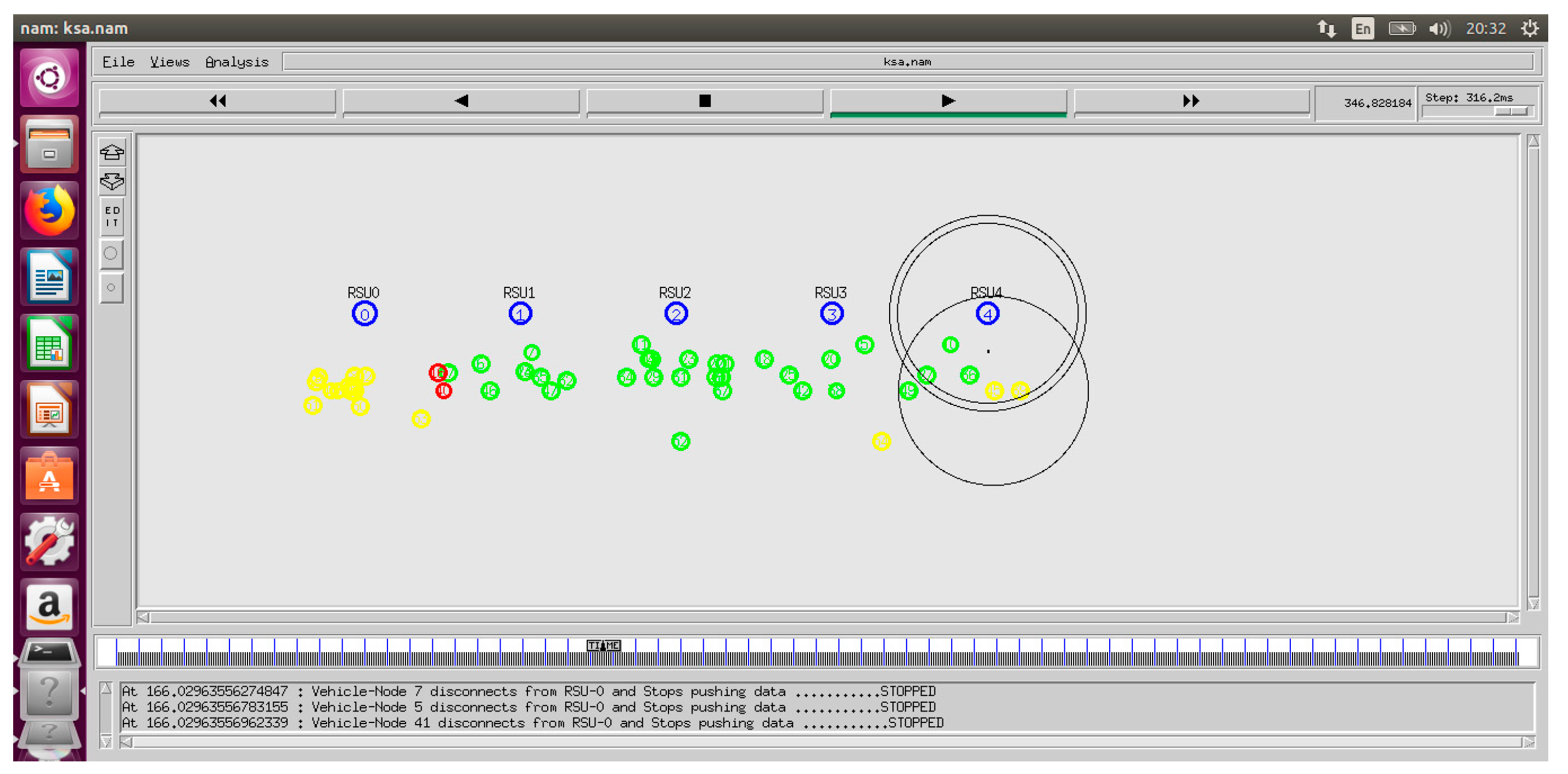
4.1. Simulation Tool of the TARS Routing Protocol
4.1.1. Simulation of Urban Mobility (SUMO)
4.1.2. Network Simulator (NS-2.35)
4.2. Performance Evaluation Metrics
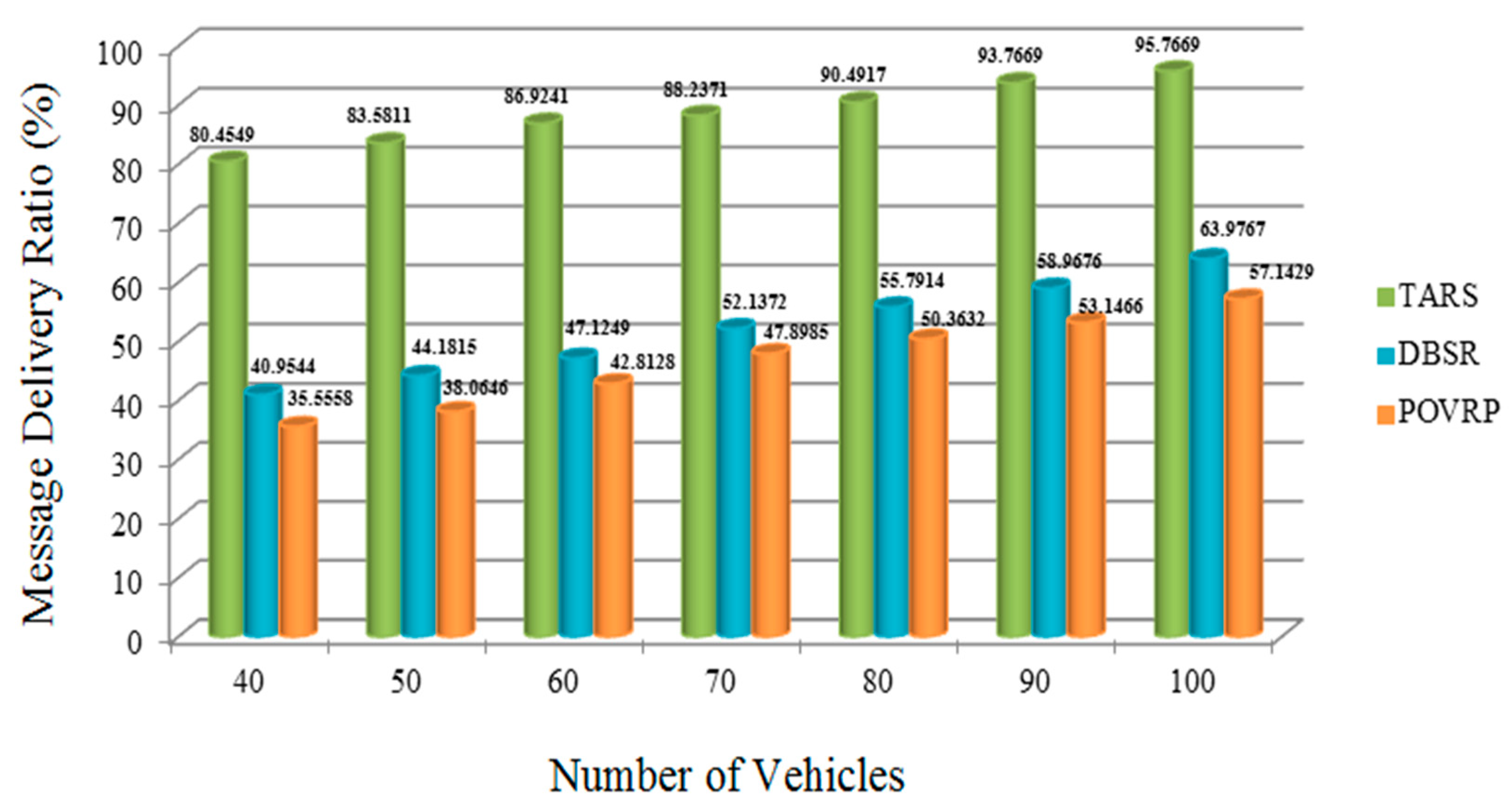
4.2.1. Message Delivery Ratio (MDR)
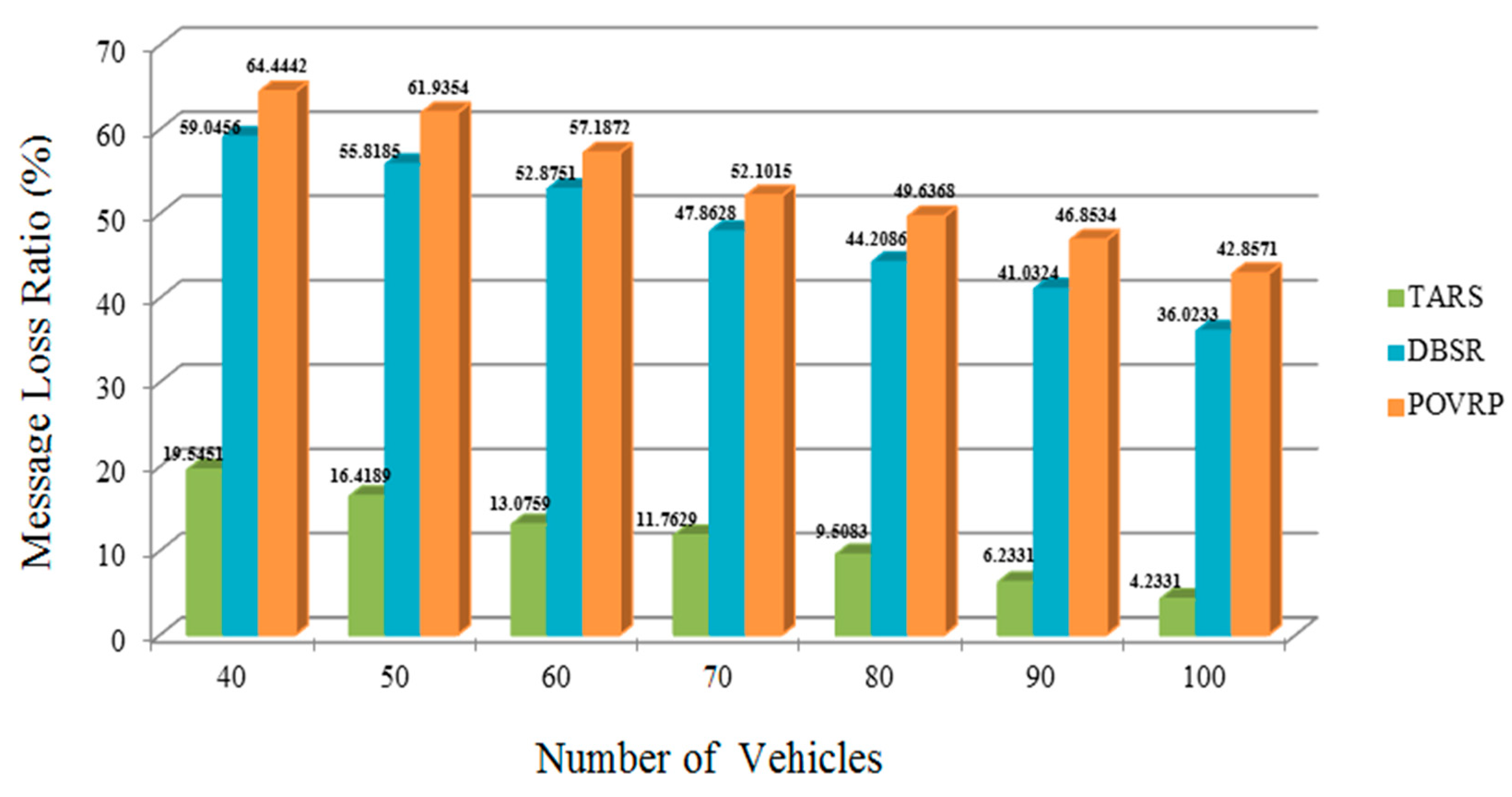
4.2.2. Message Loss Ratio (MLR)
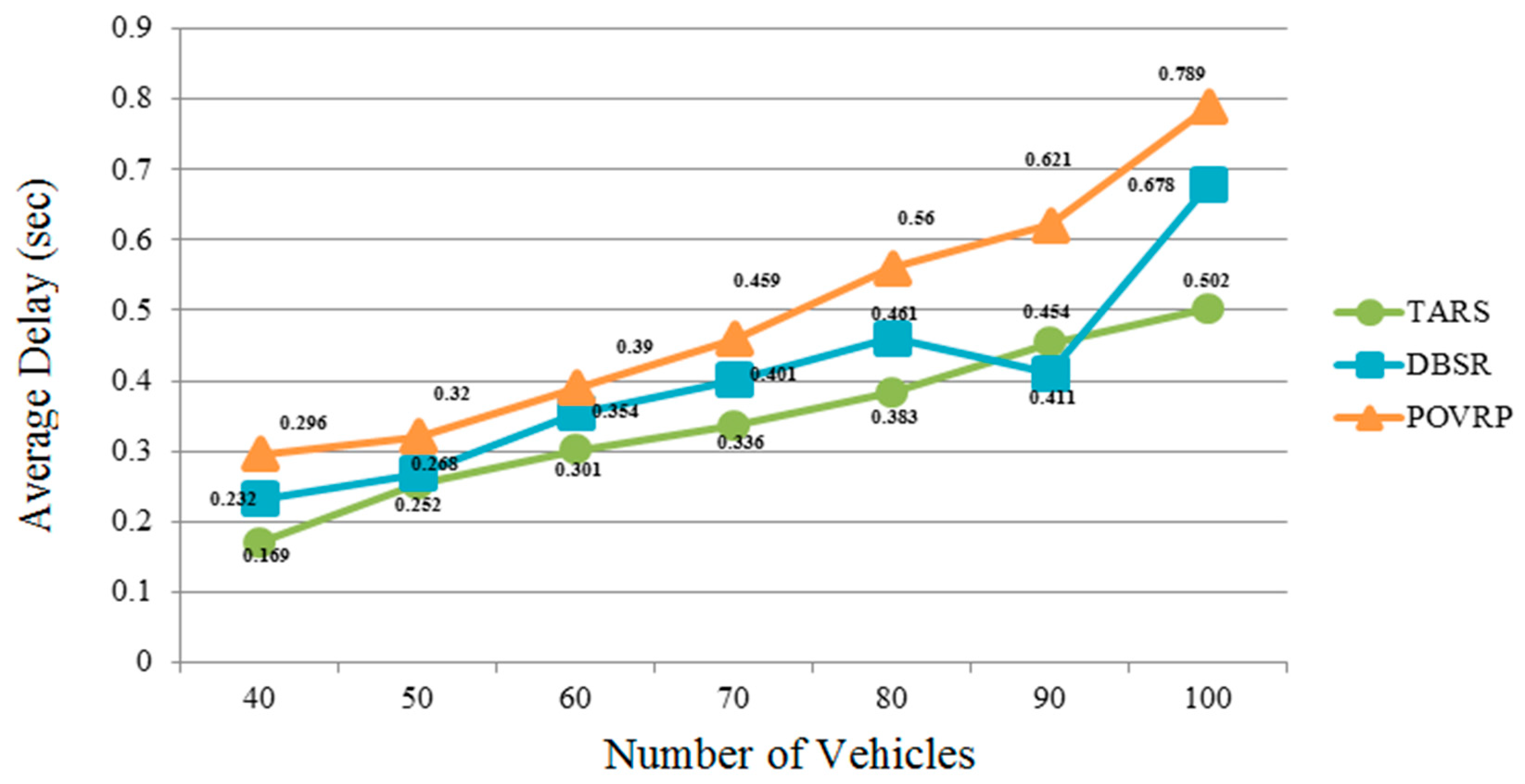
4.2.3. Average Delay
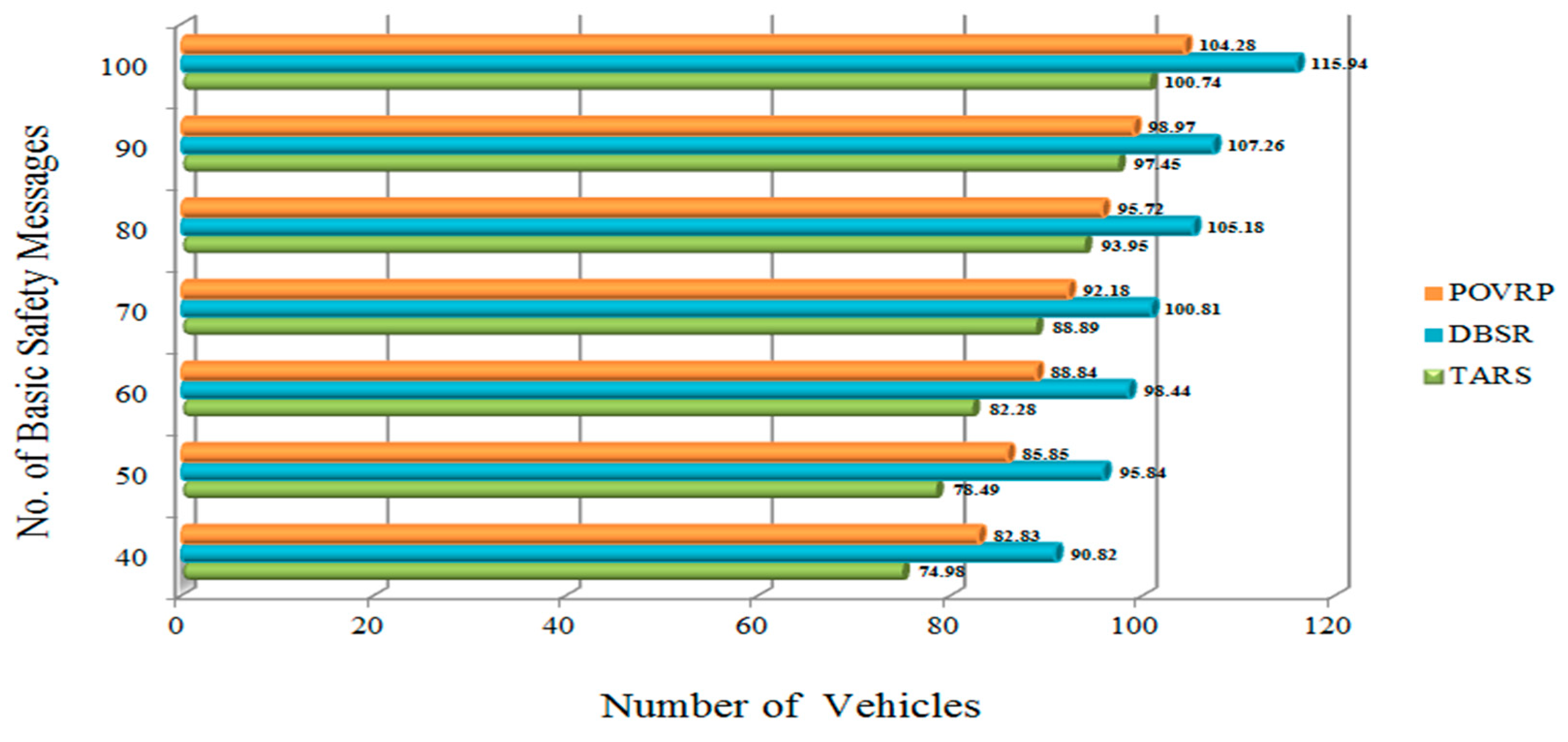
4.2.4. Basic Safety Message (BSM)
5. Results and Discussion
5.1. Basic Safety Message (BSM)
5.2. Average Delay
5.3. Message Delivery Ratio (MDR)
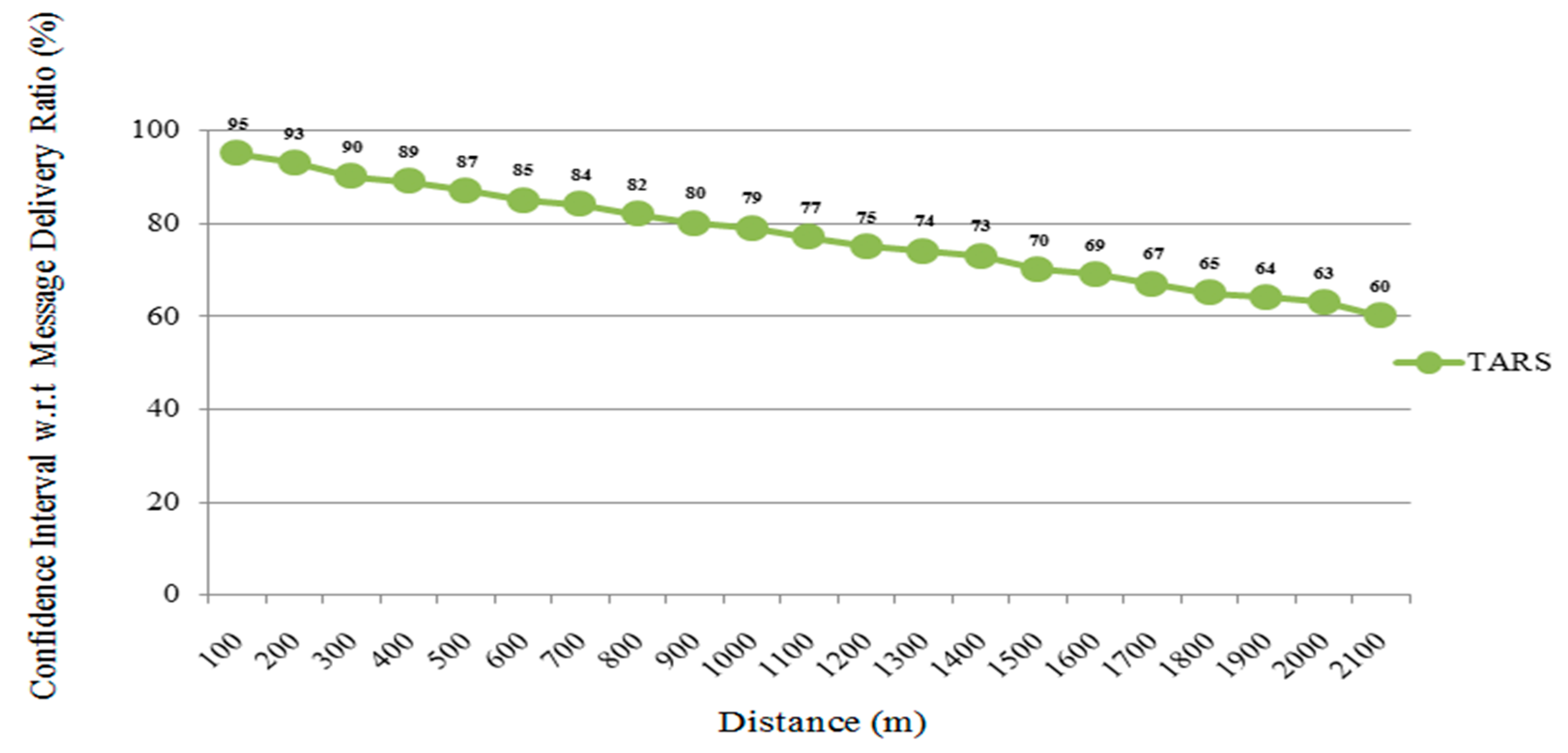
5.4. Confidence Interval in Terms of Message Delivery Ratio
5.5. Message Loss Ratio (MLR)
5.6. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization. World Health Statistics 2010 Indicator Compendium Interim Version; World Health Organization: Geneva, Switzerland, 2010. [Google Scholar]
- Ganeshkumar, P.; Gokulakrishnan, P. Emergency Situation Prediction Mechanism: A Novel Approach for Intelligent Transportation System Using Vehicular Ad Hoc Networks. Sci. World J. 2015, 2015, 218379. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Global Status Report on Road Safety 2013; World Health Organization: Geneva, Switzerland, 2013. [Google Scholar]
- Peden, M.; McGee, K.; Sharma, G. The Injury Chart Book: A Graphical Overview of the Global Burden of Injuries; World Health Organization: Geneva, Switzerland, 2002. [Google Scholar]
- Peden, M.; Scurfield, R.; Sleet, D.; Mohan, D.; Hyder, A.A.; Jarawan, E.; Mathers, C. (Eds.) World Report on Road Traffic Injury Prevention; World Health Organization: Geneva, Switzerland, 2004. [Google Scholar]
- Mansuri, F.A.; Al-Zalabani, A.H.; Zalat, M.M.; Qabshawi, R.I. Road safety and road traffic accidents in Saudi Arabia: A systematic review of existing evidence. Saudi Med. J. 2015, 36, 418–424. [Google Scholar] [CrossRef] [PubMed]
- Mohamed, H.A. Estimation of Socio-Economic Cost of Road Accidents in Saudi Arabia: Willingness-To-Pay Approach (WTP). Adv. Manag. Appl. Econ. 2015, 5, 43. [Google Scholar]
- Al Turki, Y.A. How can Saudi Arabia use the Decade of Action for Road Safety to catalyse road traffic injury prevention policy and interventions? Int. J. Inj. Control Saf. Promot. 2014, 21, 397–402. [Google Scholar] [CrossRef] [PubMed]
- DeNicola, E.; Aburizaize, O.S.; Siddique, A.; Khwaja, H.; Carpenter, D.O. Road Traffic Injury as a Major Public Health Issue in the Kingdom of Saudi Arabia: A Review. Front. Public Health 2016, 4, 215. [Google Scholar] [CrossRef] [PubMed]
- Wenger, J. Automotive Radar—Status and Perspectives. In Proceedings of the Compound Semiconductor Integrated Circuit Symposium, Palm Springs, CA, USA, 30 October–2 November 2005. [Google Scholar]
- Spacey, J. Active Safety vs. Passive Safety. Simplicable, 14 August 2016. [Google Scholar]
- Abbasi, H.I.; Voicu, R.C.; Copeland, J.A.; Chang, Y. Cooperative BSM architecture to improve transportation safety in VANETs. In Proceedings of the 13th International Wireless Communications and Mobile Computing Conference, Valencia, Spain, 26–30 June 2017; pp. 1016–1022. [Google Scholar]
- Sommer, C.; Dressler, F. Vehicular Networking; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Jiang, D.; Delgrossi, L. IEEE 802.11p: Towards an international standard for wireless access in vehicular environments. In Proceedings of the 2008 Vehicular Technology Conference, Singapore, 11–14 May 2008; pp. 2036–2040. [Google Scholar]
- De Souza, A.M.; Brennand, C.A.; Yokoyama, R.S.; Donato, E.A.; Madeira, E.R.; Villas, L.A. Traffic management systems: A classification, review, challenges, and future perspectives. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Garcia-Lozano, E.; Barba, C.T.; Igartua, M.A.; Campo, C. A distributed, bandwidth-efficient accident prevention system for interurban VANETs. In Proceedings of the 2013 International Conference on Smart Communications in Network Technologies (SaCoNeT), Paris, France, 17–19 June 2013. [Google Scholar]
- Gokulakrishnan, P.; Ganeshkumar, P. Road Accident Prevention with Instant Emergency Warning Message Dissemination in Vehicular Ad-Hoc Network. PLoS ONE 2015, 10, e0143383. [Google Scholar]
- Dawood, H.S.; Wang, Y. An Efficient Emergency Message Broadcasting Scheme in Vehicular Ad Hoc Networks. Int. J. Distrib. Sens. Netw. 2013, 11, 232916. [Google Scholar] [CrossRef]
- Benslimane, A. Optimized Dissemination of Alarm Messages in Vehicular Ad-Hoc Networks (VANET). In Proceedings of the 7th IEEE International Conference on High Speed Networks and Multimedia Communications, Toulouse, France, 30 June–2 July 2004; pp. 655–666. [Google Scholar]
- Roy, A.; Chakraborty, J. Communication based accident avoidance and congestion control mechanism in VANETs. In Proceedings of the 2015 International Symposium on Advanced Computing and Communication (ISACC), Silchar, India, 14–15 September 2015; pp. 320–327. [Google Scholar]
- Kumar, R.R.; Begum, S.W.; Manikandan, M.; Student, P.G. Distance Based Accident Prevention in Intersection Using Vanet. Int. J. Innov. Res. Comput. Commun. Eng. 2007, 2, 3624–3629. [Google Scholar]
- Kshirsagar, N.S.; Sutar, U.S.; Student, P.G. Review on Intelligent Traffic Management System Based on VANET. Int. J. Innov. Res. Comput. Commun. Eng. 2015, 3, 2001–2004. [Google Scholar]
- Kshirsagar, N.; Sutar, U.S. An Intelligent Traffic Management and Accident Prevention System based on VANET. Int. J. Sci. Res. 2013, 14, 2319–7064. [Google Scholar]
- Nzouonta, J.; Borcea, C. STEID: A Protocol for Emergency Information Dissemination in Vehicular Networks *; Report; Department of Computer Science, New Jersey Institute of Technology: Newark, NJ, USA, 2006. [Google Scholar]
- Ma, X.; Chen, X. Delay and Broadcast Reception Rates of Highway Safety Applications in Vehicular Ad Hoc Networks. In Proceedings of the 2007 Mobile Networking for Vehicular Environments, Anchorage, AK, USA, 11 May 2007. [Google Scholar]
- Kuribayashi, S.; Sakumoto, Y.; Ohsaki, H.; Hasegawa, S.; Imase, M. Performance Evaluation of Epidemic Broadcast with Directional Antennas in Vehicular Ad-Hoc Networks. In Proceedings of the 2011 IEEE/IPSJ 11th International Symposium on Applications and the Internet (SAINT), Munich, Germany, 18–21 July 2011; pp. 260–265. [Google Scholar]
- Devdhara, G.; Gohil, D.; Akhade, P.; Vala, M. Inter-Vehicular Collision Detection and Avoidance using Ad-hoc Network. Int. J. Res. Emerg. Sci. Technol. 2015, 2, 1–7. [Google Scholar]
- Raut, S.B.; Bajaj, P.R.; Malik, L.G. Prediction of Vehicle Collision Probablity at Intersection using V2V Communication. Int. J. Sci. Eng. Res. 2015, 6, 295–300. [Google Scholar]
- Bhumkar, S.P.; Deotare, V.V.; Babar, R.V. Accident Avoidance and Detection on Highways. Int. J. Eng. Trends Technol. 2012, 3, 247–252. [Google Scholar]
- Nzouonta, J.; Rajgure, N.; Wang, G.; Borcea, C. VANET Routing on City Roads Using Real-Time Vehicular Traffic Information. IEEE Trans. Veh. Technol. 2009, 58, 3609–3626. [Google Scholar] [CrossRef]
- Manoj, D.; Narendra, B. Traffic Congestion Detection by Using VANET to Improve Intelligent Transportation System (ITS). Int. J. Netw. Commun. 2015, 5, 74–82. [Google Scholar]
- Khatri, D.; Rathod, P.D.; Gajjar, P.A.; Khanna, D.; Professor, A. Traffic Congestion Detection and Avoidance in VANET. Int. J. Sci. Res. Dev. 2014, 2, 2321–2613. [Google Scholar]
- Wei, Y.C.Y. SafeAnon: A safe location privacy scheme for vehicular networks. Telecommun. Syst. 2012, 50, 339–354. [Google Scholar]
- Boualouache, A.; Moussaoui, S. TAPCS: Traffic-aware pseudonym changing strategy for VANETs. Peer-to-Peer Netw. Appl. 2017, 10, 1008–1020. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Hertkorn, G.; Rössel, C.; Wagner, P. Sumo (simulation of urban mobility)-an open-source traffic simulation. In Proceedings of the 4th Middle East Symposium on Simulation and Modelling (MESM20002), Sharjah, UAE; 2002; pp. 183–187. [Google Scholar]
- Issariyakul, T.; Hossain, E. Introduction to Network Simulator NS2; Springer Science & Business Media: Berlin, Germany, 2011. [Google Scholar]
- Chang, S.W.; Lee, S.S. Distance-Based Stable Routing Decision Scheme in Urban Vehicular Ad Hoc Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 245439. [Google Scholar] [CrossRef]
- Jung, S.-D. A Position-Based on-Demand Routing Protocol in VANET. Ph.D. Thesis, Hanyang University, Seoul, Korea, 2011. [Google Scholar]
- Mughal, B.M.; Wagan, A.A.; Hasbullah, H. Impact of Safety Beacons on the Performance of Vehicular Ad Hoc Networks; Springer: Berlin/Heidelberg, Germany, 2011; pp. 368–383. [Google Scholar]
- Anyameluhor, N.; Peytchev, E.; Akhlaghinia, J.; Lane, C.; Kingdom, U. Improving Message Delivery In Vehicular Ad-Hoc Networks. In Proceedings of the 31st European Conference on Modelling and Simulation ECMS 2017, Budapest, Hungary, 23–26 May 2017; Volume 6. [Google Scholar]
- Kalpande, P.B. Reliable broadcast of safety messages in VANET. Int. J. Res. Advent Technol. 2015, 3, 73–78. [Google Scholar]
- Garg, D.; Singh, R.; Kaur, A. Performance Evaluation of Data Delivery Mechanism for CognitiveRadio Vehicular and Vehicular Ad-Hoc Networks. Procedia Comput. Sci. 2015, 57, 596–605. [Google Scholar] [CrossRef]
- Wahid, A.; Shah, M.A.; Qureshi, F.F.; Maryam, H.; Iqbal, R.; Chang, V. Big data analytics for mitigating broadcast storm in Vehicular Content Centric networks. Future Gener. Comput. Syst. 2017. [Google Scholar] [CrossRef]
- Abbasi, I.A. Dynamic Multiple Junction Selection Based Routing Protocol for VANETs in City Environment. Appl. Sci. 2018, 8, 687. [Google Scholar] [CrossRef]
- Paul, M.; Sanyal, G. Traffic Analysis of Vehicular Ad-Hoc Networks of V2I Communication. Procedia Comput. Sci. 2015, 54, 215–223. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Proposed Scheme Name | Proposed Scheme Methodology | Issues Identified | Benefits | Scalability Issue | Simulation Tool |
|---|---|---|---|---|---|---|
| Garcia-Lozano et al. [16] | Warning Message routing scheme | The warning message scheme has been introduced for low priority messages in order to achieve efficient bandwidth utilization. The scheme achieves the best high and low priority message dissemination in drastic weather conditions | Drivers’ reaction time when some situations occur. Delay in message broadcasting | Less delay efficient utilization of the bandwidth | Yes | NS-2.34 |
| Gokulakrishnan et al. [17] | Road Accident Prevention (RAP). | When RSU detects any unusual activity, broadcast EM message to all those vehicles which are lying in the range of the RSU. EW message must be sent at the exact period to prevent road accidents. | Timeliness of alert messages Delay in message broadcasting | Less delay | No | NS-2.0 |
| Salman Dawood et al. [18] | Efficient Emergency Message Broadcasting (EEMB) | The affected vehicle selects the best forwarder and broadcasts the emergency message. The forwarder vehicle rebroadcasts the emergency message to the RSU. This procedure continues until the emergency message covers the whole risk zone. The proposed scheme overcome the problem of network fragmentation by using store-carry and forward. | The Collision probability to evaluate the communication in VANETs. Timeliness of alert messages | Less message overhead | No | MATLAB, R2011b Version |
| Benslimane et al. [19] | Optimized Dissemination of Alarm Message (ODAM) | Vehicles which have the alarm message must broadcast the message until it selects another forwarder vehicle. | Detection of the Traffic Congestion Flooding | Less overhead Less end-to-end delay | No | MATLAB |
| Roy et al. [20] | Traffic congestion detection and avoidance scheme | An RSU broadcasts the emergency message to the other RSUs which lies in its range. This prevents the duplication of an emergency message. These messages help the driver to select another route to avoid accidents. | Distribution of the capacity of the bandwidth. Broadcasting storm problem Detection of Traffic congestion. | High throughput Less end-to-end delay High packet delivery ratio | No | NS-2.0 |
| Authors | Proposed Scheme Name | Proposed Scheme Methodology | Issues Identified | Benefits | Scalability Issue | Simulation Tool |
|---|---|---|---|---|---|---|
| Rajesh-Kumar et al. [21] | Distance Based routing scheme | The scheme obtains the vehicle location and calculates the distance of the vehicle that is near to the intersection. After calculating the location, the vehicle with the shortest distance to the intersection will send an alert to the other vehicles about its distance and location. All other vehicles will be alerted about the upcoming vehicle and are protected from the traffic accident | Possibilities presented at the intersection. Timeliness of alert messages | Less traffic congestion Maximum Packet Delivery Ratio. | Yes | NS-2.34 |
| Nzouonta et al. [24] | Spatio-Temporal Emergency Information Dissemination (STEID) | The routing scheme satisfies both temporal and spatial reliability by guaranteeing the delivery of an alert message in a short interval The message passes to all the vehicles that are passing through the zone during the lifetime of an emergency. | Delay in message broadcasting | Maximum delivery ratio of alert messages Less traffic load Less delay w.r.t message reception rate | No | NS-2.29 |
| Devdhara et al. [27,28] | Inter-Vehicle Collision (IVC) scheme | All vehicles in the cluster broadcast secure the message to give further information to the other vehicles. A traffic accident which lies in the same cluster is detected and information about the accident is sent to the other vehicles in the cluster. | Simple Flooding | Cluster size Driver reaction time Transmission range | No | SUMO OMNET++ VEINS Clustering Algorithm Techniques |
| Bhumkar et al. [29] | Driver fatigue detection scheme | The proposed scheme used real time sensors to detect the driver’s fatigue immediately. Upon detection, it warns through a notification message and then turns the ignition off. The scheme performs very well on human behavior like drinking alcohol. | Human behavior causes traffic accidents | Driver reaction time Transmission range | No | ARM7 MQ-3 gas sensor GPS Smart Receiver Google Map API Visual Basic (VB) |
| Nzouonta et al. [30] | Road Based Vehicular Traffic (RBVT) routing scheme | The proposed routing scheme used the geographical forwarding scheme in order to transmit interest packets between road intersections on the route. The proposed scheme performs very well on the intersections. AODV protocol is used to discover the route. | Possibilities use the presented intersection. The collision probability is used to evaluate the communication in VANETs. | Average packet delivery ratio High Average delay due to its traffic overhead. | No | NS-2.30 SUMO DCF standard with IEEE 802.11p |
| Manoj et al. [31] | Traffic congestion detection and avoidance scheme | After the detection of traffic congestion, the drivers of the vehicles provide magnitude and location of the vehicle. The affected vehicle, which is involved in the traffic accident, broadcasts the warning message to the RSU. The RSU further rebroadcasts the warning message to make a decision on an alternate route. | Distribution of the capacity of the bandwidth. Detection of the Traffic Congestion. | Efficient bandwidth utilization Minimum message overhead | No | Net Beans IDE 7.0 Java |
| Khatri et al. [32] | Traffic congestion detection and avoidance scheme | The best forwarder vehicle collects the congestion message. It checks if the area is congested or not. If not, then the vehicle stores this message in its own memory. Otherwise, it simply shares the congestion location with the other vehicles [33]. | Distribution of the capacity of the bandwidth. Detection of the Traffic Congestion. | Less transmission overhead Efficient utilization of the bandwidth | No | NS-2.0 SUMO |
| Network Simulator | NS-2.35 |
|---|---|
| Transmission Range RSU | 400 m |
| Waiting Time | 10 s |
| Total No. of Vehicles | 40, 50, 60, 70, 80, 90, 100 |
| Packet Size | 1024 bytes |
| MAC Layer | IEEE 802.11p |
| Total number of Lanes on highway | 4 |
| Velocity Threshold | 40 m/h |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aldegheishem, A.; Yasmeen, H.; Maryam, H.; Shah, M.A.; Mehmood, A.; Alrajeh, N.; Song, H. Smart Road Traffic Accidents Reduction Strategy Based on Intelligent Transportation Systems (TARS). Sensors 2018, 18, 1983. https://doi.org/10.3390/s18071983
Aldegheishem A, Yasmeen H, Maryam H, Shah MA, Mehmood A, Alrajeh N, Song H. Smart Road Traffic Accidents Reduction Strategy Based on Intelligent Transportation Systems (TARS). Sensors. 2018; 18(7):1983. https://doi.org/10.3390/s18071983
Chicago/Turabian StyleAldegheishem, Abdulaziz, Humera Yasmeen, Hafsa Maryam, Munam Ali Shah, Amjad Mehmood, Nabil Alrajeh, and Houbing Song. 2018. "Smart Road Traffic Accidents Reduction Strategy Based on Intelligent Transportation Systems (TARS)" Sensors 18, no. 7: 1983. https://doi.org/10.3390/s18071983
APA StyleAldegheishem, A., Yasmeen, H., Maryam, H., Shah, M. A., Mehmood, A., Alrajeh, N., & Song, H. (2018). Smart Road Traffic Accidents Reduction Strategy Based on Intelligent Transportation Systems (TARS). Sensors, 18(7), 1983. https://doi.org/10.3390/s18071983