In the DST framework, the uncertain information is modelled not only by mass functions, the FOD is also an important source of uncertainty [
40]. In addition, in the open world assumption, the mass value of the empty set may not be zero, which also indicates the incompleteness of the FOD [
30]. With this background, how to measure the uncertain degree in the open world assumption of the DST framework is a new perspective and an important issue. According to literature review, no existing uncertainty measure addresses this problem, which is the reason for this work.
It is obvious that the Deng entropy
in Equation (
10) is not available for the uncertainty measure of BPAs in this case. The denominator of the
function with respect to
will be (
), which is illegal. This is because the Deng entropy is only based on the mass function of the focal element and the cardinality of the corresponding proposition. In the open world assumption, the mass value of empty set may not be zero. In addition, how to define the element number in incomplete FOD is also an open issue. The same question also exists in other uncertainty measures listed in
Table 1. The works in [
37,
38,
40,
42] also pay no attention to the possible nonzero mass function of the empty set as well as the possible incomplete element number in the FOD. A new uncertainty measure which is extended from the Deng entropy in the closed world, named the extension to Deng’s entropy in the open world assumption, is proposed especially for the problems mentioned above.
3.1. An Extension to Deng’s Entropy in the Open World Assumption
Definition 9. The extension to Deng’s entropy in the open world assumption is defined as follows:where is the cardinality of the proposition A, X is the FOD, denotes the certain element number in the FOD, is proposed to denote the uncertain element number in the FOD with respect to the corresponding proposition (A). ‘’ is the symbol of the ceiling function, which means the smallest integer that is no smaller than the independent variable, e.g., . The extended measure addresses three parts of uncertainty in the DST framework, including the uncertain information expressed by the mass functions of focal elements, the mass function of the empty set and the possible incompleteness of the FOD. In detail, inspired by the existed uncertainty measures and the Deng entropy, the EDEOW handles two aspects of uncertainty according to the following methods:
In the closed world where , the uncertainty represented by the mass function of the focal element as well as the corresponding cardinality .
In the open world where , the nonzero mass function of the empty set can be an indicator of the completeness or incompleteness of the FOD; currently, is chosen to express this uncertainty.
It should be noted that, in the EDEOW defined in Equation (
12), the proposition
A is no longer limited as a traditional focal element, it can also be an empty set ∅ which means uncertainty in the FOD [
30]. In addition, apart from the
, there must exist many types of expressions to express the incompleteness of the FOD.
Recall the BPAs in Equation (
11), with the EDEOW, the uncertainty degree of the BPAs can be calculated as follows:
With the proposed EDEOW, the problem in Example 1 can be handled. The BPAs with a nonzero mass function of the empty set can be handled now with the extended measure.
3.2. Numerical Example and Discussion
Example 2. In FOD , the mass functions are: According to the BPAs in Equation (
14), the mass value of the empty set is 0, which indicates the BPAs are assigned in the closed world. The uncertain degree with Shannon entropy
H, Deng entropy
and the EDEOW
can be calculated respectively as follows:
Obviously, the mass function assigns a belief of 100% on the proposition , which means the uncertain degree of the proposition is 0. In this case, the measuring result of the EDEOW is consistent with that of Shannon entropy and Deng entropy.
Example 3. In FOD , the mass functions are: The mass value of the empty set is 0, the BPAs are assigned in the closed world. The uncertain degree measured by
H,
and
can be calculated respectively as follows:
According to the measuring results shown in Equations (
15) and (
17), if a mass function is assigned on the single subset, then the EDEOW can be degenerated to Deng entropy in the closed world. More importantly, the EDEOW satisfies the property of probabilistic consistency if the BPAs are only assigned on the single subset in the closed world. It should be noted that Shannon entropy and Deng entropy are not available if the BPAs are assigned in the open world where the mass value of the empty set is nonzero; as is shown in Example 1 and the following Example 4.
Example 4. In a changing FOD , consider the mass functions given as follows: The mass value of the empty set is 0.5, the BPAs are assigned in the open world assumption. The uncertain degree measured by
H,
and
are presented in
Table 2. Calculation results show that Shannon entropy
cannot reflect the changes of the cardinality in the FOD
(even if we treat the empty set ∅ as an uncertain proposition with nonzero set to make this function applicable in this case), while the Deng entropy is not applicable in this case for the reason that
. Only the EDEOW can successfully express the enlarging in the FOD as the value of
increases with the increasing of the
.
In the following example adopted from [
21], the EDEOW is compared with some other uncertainty measures in the DST framework including Deng entropy
, Yager’s dissonance measure
, Dubois &Prade’s weighted Hartley entropy
, Hohle’s confusion measure
, Klir & Ramer’s discord measure
, Klir & Parviz’s strife measure
and George & Pal’s total conflict measure
.
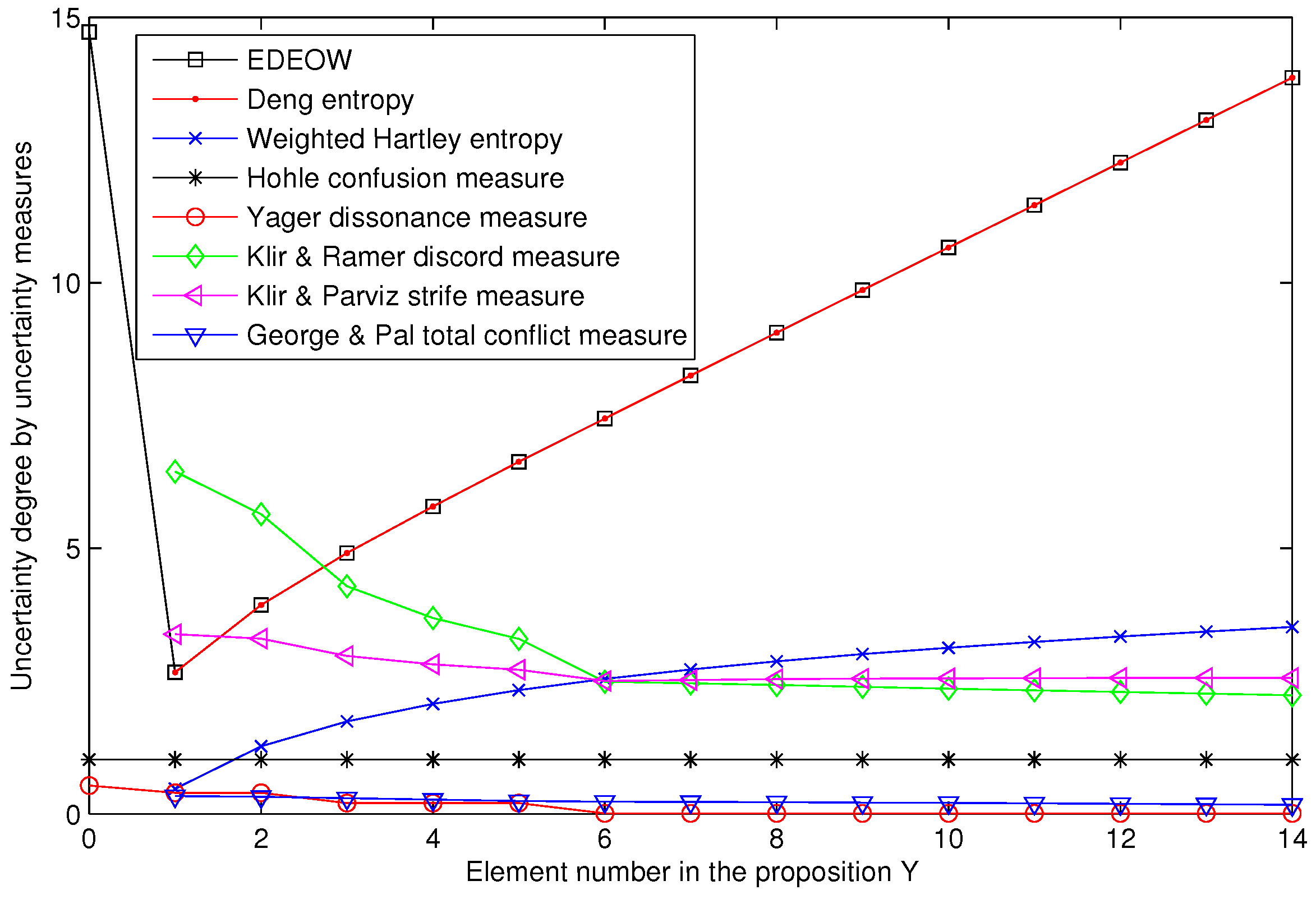
Example 5. In the FOD , 15 certain elements are denoted as element 1, 2, …, 14, and 15. The mass functions are as follows: The element number in the proposition
Y changes from 0 to 14, as is shown in
Table 3. If the element number of
Y is 0, which means
Y is an empty set and the FOD may be incomplete, the BPAs are assigned in the open world assumption. In this case, the uncertainty measures
,
,
,
,
,
and
, which are defined in the closed world is not applicable (N/A). Mathematically,
and
can be applied to calculate the uncertain degree if and only if the constraint of “BPAs are for focal element” is ignored which means a possible modification of the definition of Yager’s dissonance measure
and Hohle’s confusion measure
. If the element number of
Y changes from 1 to 14, then all the uncertainty measures presented in the Section Preliminaries are available for measuring the uncertain degree. The uncertain degree of the BPAs with different uncertainty measures are presented in
Table 3, where there is a large discrepancy among the values of the uncertainty measures especially for the proposition
Y = ∅. Compared with the analysis in [
21], the new changes exist in the nonzero mass value of the empty set. The
is the only proper measure in this case compared with other measures listed in
Table 3. Of course, we also believe that there are new proper measures for this case since a new measure is always being proposed, e.g., the new entropy in [
23].
Figure 1 presents the uncertain degree of different uncertainty measures visually. Intuitively, if a big mass value is assigned on the empty set, which means a big uncertain degree in the FOD, in this case, the EDEOW can measure the uncertain degree. It seems that Yager’s dissonance measure
and Hohle’s confusion measure
can be generalized to measure the uncertain degree in the open world assumption where the mass value of the empty set is nonzero. However,
Figure 1 shows that the uncertain degree measured by
and
does not increase along with the increasing element number in the proposition
Y. The
,
,
,
and
are all not available for uncertainty measure in the open world assumption because of the limitation in the
function of the definitions. Above all, the other uncertainty measures in
Table 1 can only be applied in the closed world. Only the EDEOW can successfully measure the uncertainty degree of belief functions in this case. In addition, the EDEOW is identical to Deng entropy in the closed world, which ensures a successful possible extension of the Deng entropy.






{kind=link}
{kind=link}