Satellite Launcher Navigation with One Versus Three IMUs: Sensor Positioning and Data Fusion Model Analysis


Abstract
1. Introduction
- compare the performances of three IMUs against that of one better quality IMU;
- investigate the effect of collocating IMUs versus distributing them along the launcher structure;
- test three multi-IMU navigation solutions:
- –
- fusion of all IMUs in one INS,
- –
- fusion of multiple INSs, and
- –
- fusion of multiple INSs with geometrical constraints.
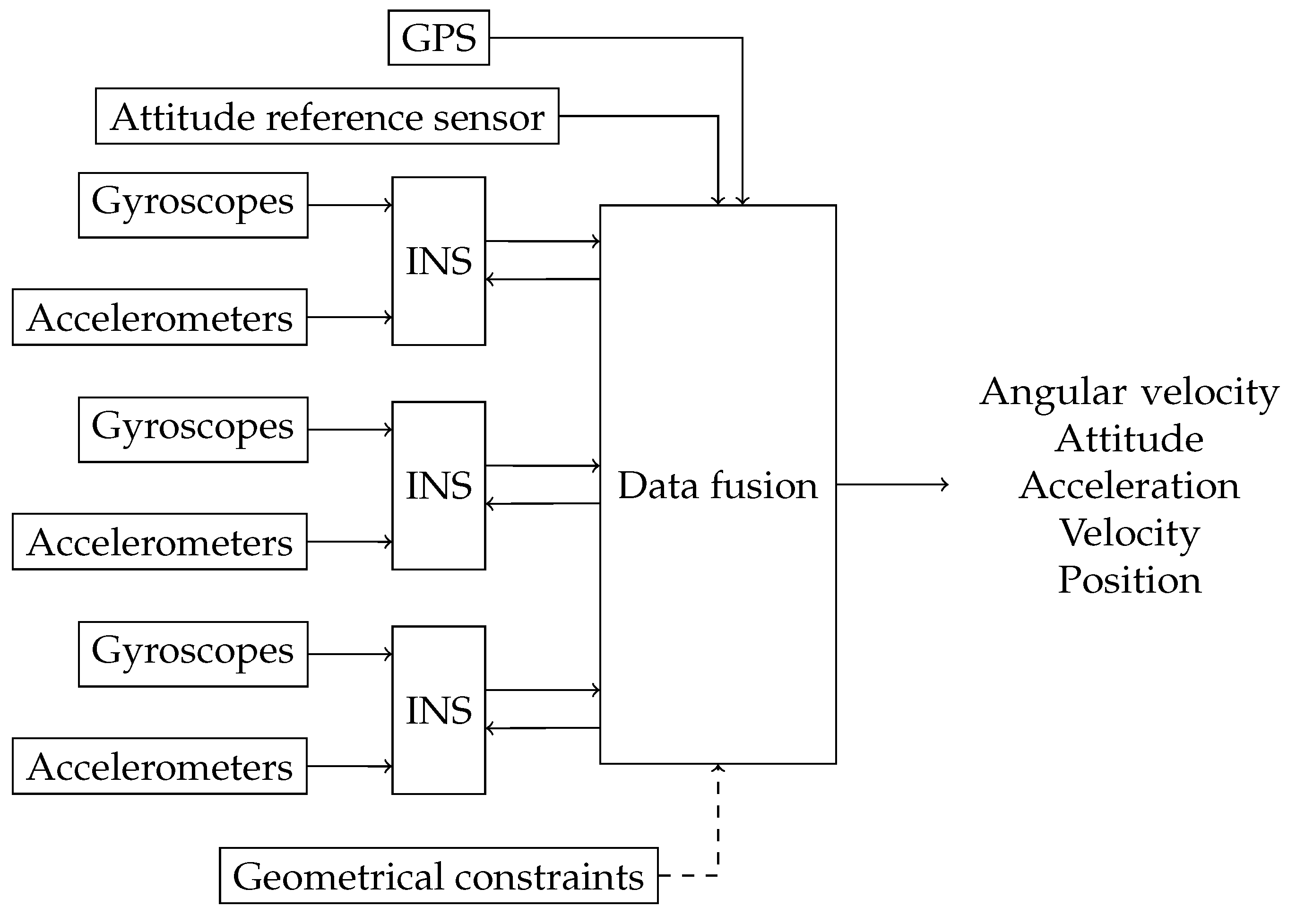
2. Data Fusion Architectures
2.1. Fusion with One IMU
2.2. Fusion of Multiple IMUs within One INS
2.3. Fusion of Multiple INSs in a Stacked Filter
2.3.1. Geometrical Constraint Equations
2.3.2. Fusion of all INSs
2.3.3. Individual INS Error State Models
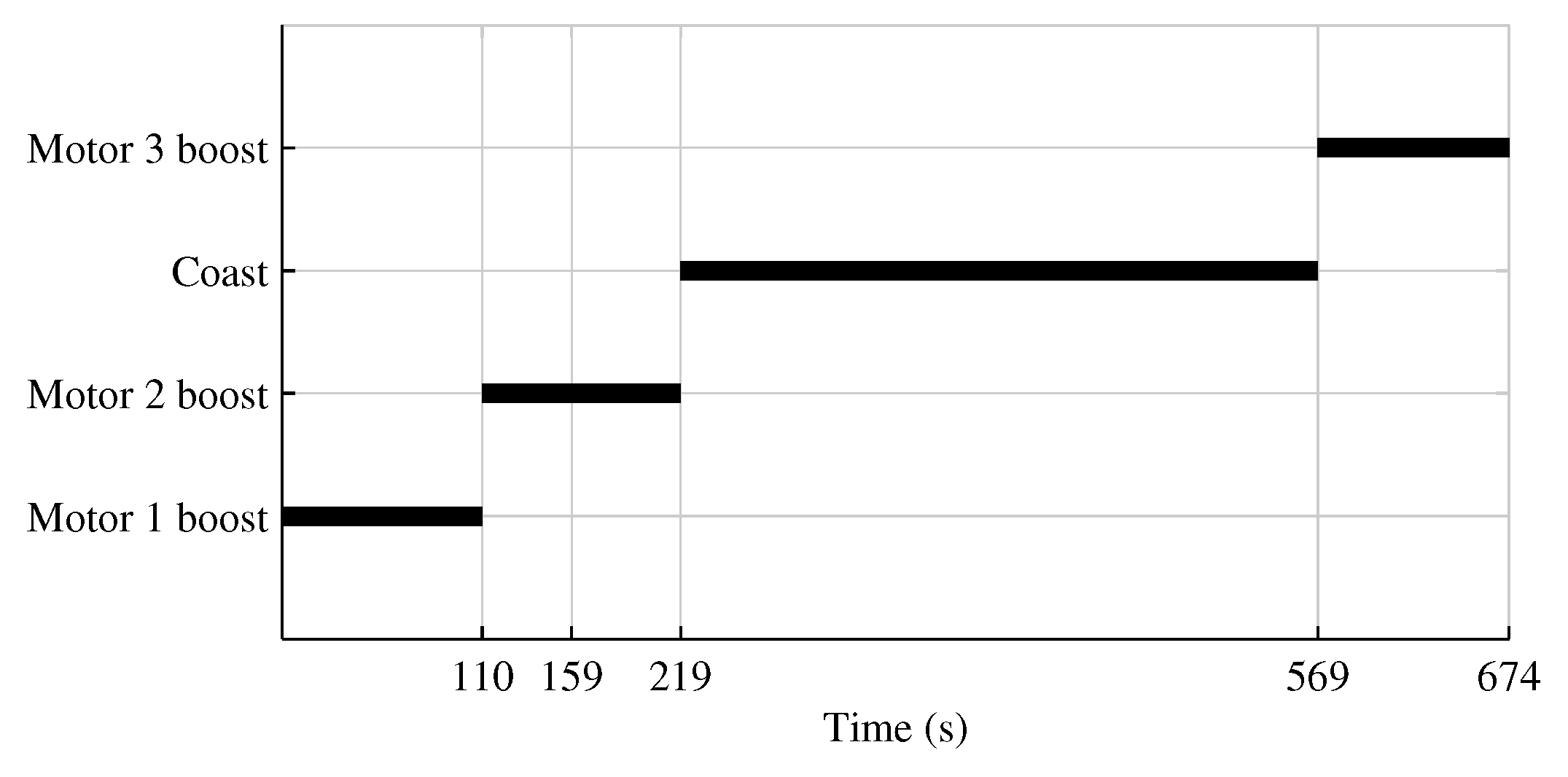
3. Test Parameters
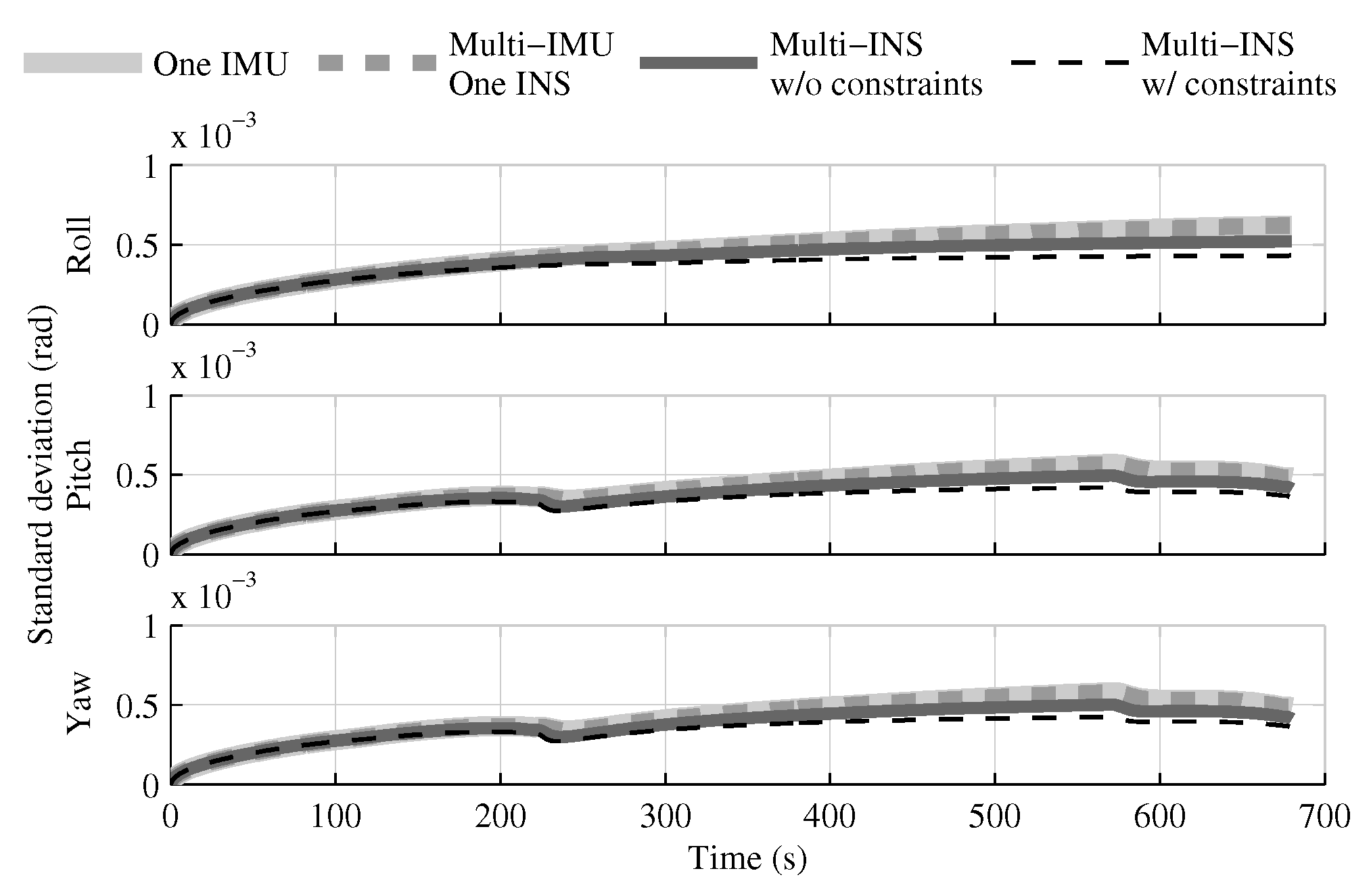
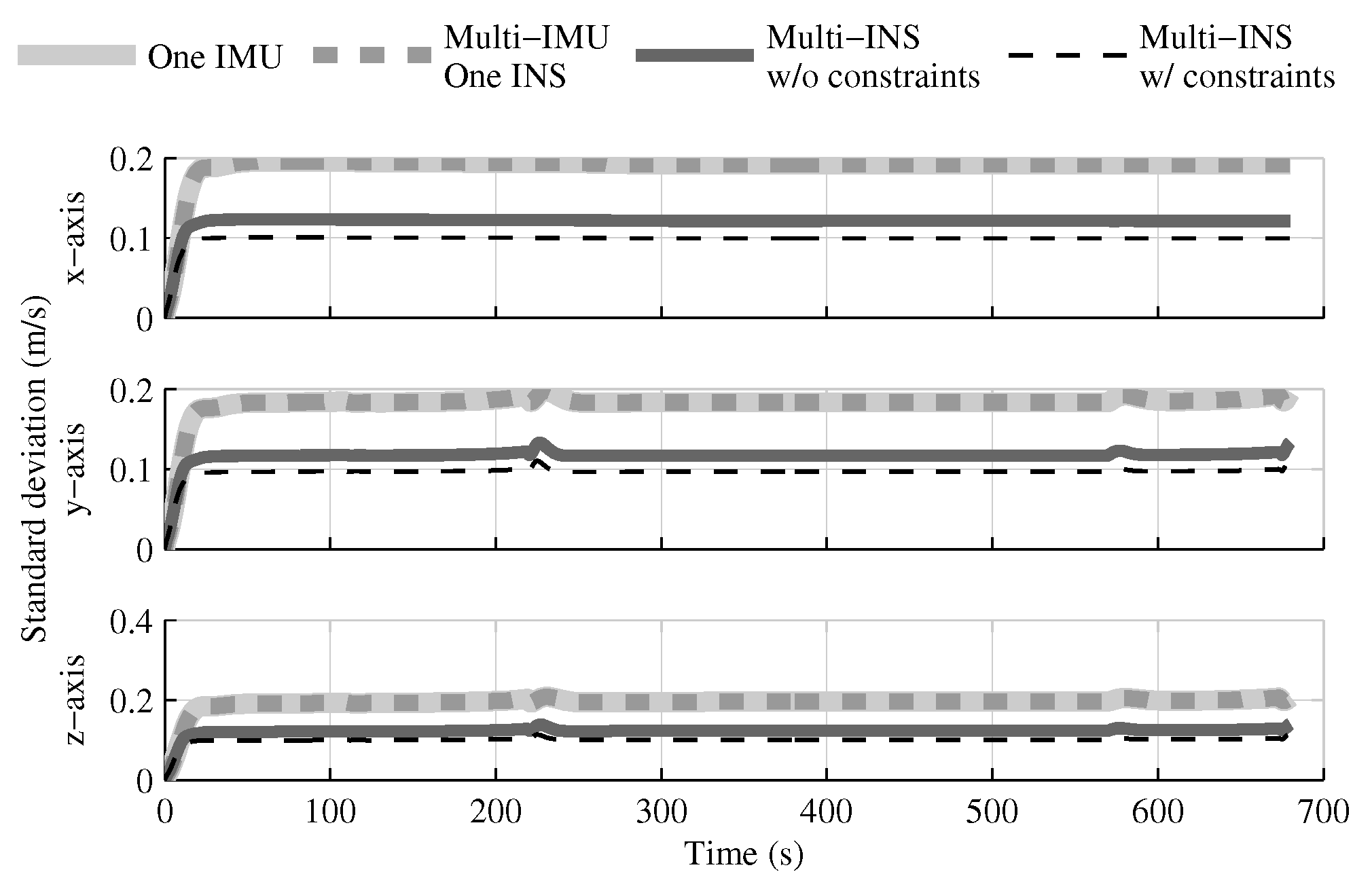
4. Results Analysis
4.1. Tests with All Sensors in the Launcher Head
4.1.1. Test with GPS Receiver
4.1.2. Test without GPS Receiver
4.1.3. Conclusion on Sensors Installed in the Launcher Head
4.2. Tests with IMUs Distributed Along the Launcher Structure
5. Conclusions
- evaluating the impact of using more than three IMUs in the fusion of multiple INSs, either with or without geometrical constraints;
- testing the fusion of multiple INSs with geometrical constraints, when independent GPS receivers and attitude reference sensors are used for each INS;
- investigating the reasons which lead the Kalman filter to diverge when the GPS receiver and attitude reference sensor measurement correlations among INSs are considered in the observation covariance matrix;
- comparing the impact of including the knowledge of the launcher dynamics in the fusion of multiple IMUs in one INS to the one obtained by the authors in a previous work with a single IMU.
Author Contributions
Funding
Conflicts of Interest
References
- Narmada, S.; Delaux, P.; Biard, A. Use of GNSS for next European launcher generation. In Proceedings of the 6th International ESA Conference on Guidance, Navigation and Control Systems, Loutraki, Greece, 17–20 October 2005; p. 9. [Google Scholar]
- Beaudoin, Y.; Desbiens, A.; Gagnon, E.; Landry, R.J. Improved Satellite Launcher Navigation Performance by Using the Reference Trajectory Data. In Proceedings of the Royal Institute of Navigation International Navigation Conference 2015 (INC15), Manchester, UK, 24–26 February 2015. [Google Scholar]
- Grigorie, T.L.; Botez, R.M.; Sandu, D.G.; Grigorie, O. Experimental testing of a data fusion algorithm for miniaturized inertial sensors in redundant configurations. In Proceedings of the 2014 International Conference on Mathematical Methods, Mathematical Models and Simulation in Science and Engineering, Interlaken, Switzerland, 22–24 February 2014. [Google Scholar]
- Edu, I.R.; Grigorie, T.L.; Enache, A.; Ancuta, F.; Cepisca, C. A redundant aircraft attitude system based on miniaturised gyro clusters data fusion by using Kalman filtering. UPB Sci. Bull. Ser. C Electr. Eng. 2013, 75, 183–198. [Google Scholar]
- Kachmar, P.M.; Wood, L. Space navigation applications. Navigation 1995, 42, 187–234. [Google Scholar] [CrossRef]
- Braun, B.; Markgraf, M.; Montenbruck, O. Performance analysis of IMU-augmented GNSS tracking systems for space launch vehicles. CEAS Space J. 2016, 8, 117–133. [Google Scholar] [CrossRef]
- Trigo, G.F.; Theil, S. Architectural elements of hybrid navigation systems for future space transportation. CEAS Space J. 2017, 1–20. [Google Scholar] [CrossRef]
- Jia, H. Data Fusion Methodologies for Multisensor Aircraft Navigation Systems. Ph.D. Thesis, Cranfield University, Bedford, UK, 2004. [Google Scholar]
- Allerton, D.; Jia, H. A Review of Multisensor Fusion Methodologies for Aircraft Navigation Systems. J. Navig. 2005, 58, 405–417. [Google Scholar] [CrossRef]
- Waegli, A.; Guerrier, S.; Skaloud, J. Redundant MEMS-IMU integrated with GPS for performance assessment in sports. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 1260–1268. [Google Scholar] [CrossRef]
- Martin, H.; Groves, P. A new approach to better low-cost MEMS IMU performance using sensor arrays. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; pp. 2125–2142. [Google Scholar]
- Tanenhaus, M.; Geis, T.; Carhoun, D.; Holland, A. Accurate real time inertial navigation device by application and processing of arrays of MEMS inertial sensors. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010; pp. 20–26. [Google Scholar] [CrossRef]
- Tanenhaus, M.; Carhoun, D.; Geis, T.; Wan, E.; Holland, A. Miniature IMU/INS with optimally fused low drift MEMS gyro and accelerometers for applications in GPS-denied environments. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 259–264. [Google Scholar] [CrossRef]
- Allerton, D.J.; Jia, H. Distributed data fusion algorithms for inertial network systems. IET Radar Sonar Navig. 2008, 2, 51–62. [Google Scholar] [CrossRef]
- Sukkarieh, S.; Gibbens, P.; Grocholsky, B.; Willis, K.; Durrant-Whyte, H.F. A low-cost, redundant inertial measurement unit for unmanned air vehicles. Int. J. Robot. Res. 2000, 19, 1089–1103. [Google Scholar] [CrossRef]
- Escobar Alvarez, H.D. Geometrical Configuration Comparison of Redundant Inertial Measurement Units; Technical Report; University of Texas at Austin: Austin, TX, USA, 2010. [Google Scholar]
- Shim, D.S.; Yang, C.K. Optimal configuration of redundant inertial sensors for navigation and FDI performance. Sensors 2010, 10, 6497–6512. [Google Scholar] [CrossRef] [PubMed]
- Guerrier, S. Improving accuracy with multiple sensors: Study of redundant MEMS-IMU/GPS configurations. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; Volume 5. [Google Scholar]
- Hanson, R. Using Multiple MEMS IMUs to Form a Distributed Inertial Measurement Unit. Master’s Thesis, Air Force Institute of Technology, Department of Electrical and Computer Engineering, Wright-Patterson Air Force Base, Dayton, OH, USA, 2005. [Google Scholar]
- Jafari, M. Inertial navigation accuracy increasing using redundant sensors. J. Sci. Eng. 2013, 1, 55–66. [Google Scholar]
- Harrison, J.V.; Gai, E.G. Evaluating sensor orientations for navigation performance and failure detection. IEEE Trans. Aerosp. Electron. Syst. 1977, AES-13, 631–643. [Google Scholar] [CrossRef]
- Guerrier, S. Integration of Skew-Redundant MEMS-IMU with GPS for Improved Navigation Performance. Master’s Thesis, École Polytechnique Fédérale de Lausanne, Geodetic Engineering Laboratory, Lausanne, Switzerland, 2008. [Google Scholar]
- Giroux, R. Capteurs Bas de Gamme Et Systèmes de Navigation Inertielle: Nouveaux Paradigmes D’Application. Ph.D. Thesis, École de Technologie Supérieure, Département de Genie Électrique, Montreal, QC, Canada, 2004. (In French). [Google Scholar]
- Lee, S.C.; Huang, Y.C. Innovative estimation method with measurement likelihood for all-accelerometer type inertial navigation system. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 339–346. [Google Scholar] [CrossRef]
- Cardou, P.; Angeles, J. Linear estimation of the rigid-body acceleration field from point-acceleration measurements. J. Dyn. Syst. Meas. Control 2009, 131, 041013. [Google Scholar] [CrossRef]
- Dube, D.; Cardou, P. The calibration of an array of accelerometers. Trans. Can. Soc. Mech. Eng. 2011, 35, 251–267. [Google Scholar] [CrossRef]
- He, P.; Cardou, P.; Desbiens, A. Estimating the orientation of a game controller moving in the vertical plane using inertial sensors. In Proceedings of the ASME 2012 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE 2012), Chicago, IL, USA, 12–15 August 2012; Volume 4, pp. 1375–1384. [Google Scholar]
- Chen, T.L. Design and analysis of a fault-tolerant coplanar gyro-free inertial measurement unit. J. Microelectromech. Syst. 2008, 17, 201–212. [Google Scholar] [CrossRef]
- Cardou, P.; Angeles, J. Angular velocity estimation from the angular acceleration matrix. J. Appl. Mech. 2008, 75, 021003. [Google Scholar] [CrossRef]
- Skog, I.; Nilsson, J.O.; Händel, P.; Nehorai, A. Inertial Sensor Arrays, Maximum Likelihood, and Cram-Rao Bound. IEEE Trans. Signal Process. 2016, 64, 4218–4227. [Google Scholar] [CrossRef]
- Nilsson, J.O.; Skog, I. Inertial sensor arrays—A literature review. In Proceedings of the 2016 European Navigation Conference (ENC), Helsinki, Finland, 30 May–2 June 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Colomina, I.; Giménez, M.; Rosales, J.J.; Wis, M.; Gómez, A.; Miguelsanz, P. Redundant imus for precise trajectory determination. In Proceedings of the 20th International Society for Photogrammetry and Remote Sensing Congress, Istanbul, Turkey, 12–23 July2004. [Google Scholar]
- Waegli, A.; Skaloud, J.; Guerrier, S.; Pares, M.E.; Colomina, I. Noise reduction and estimation in multiple micro-electro-mechanical inertial systems. Meas. Sci. Technol. 2010, 21, 065201. [Google Scholar] [CrossRef]
- Bancroft, J.B. Multiple Inertial Measurement Unit Integration for Pedestrian Navigation. Ph.D. Thesis, University of Calgary, Department of Geomatics Engineering, Calgary, AB, Canada, 2010. [Google Scholar]
- Savage, P.G. Strapdown Analytics; Strapdown Associates, Inc.: Maple Plain, MN, USA, 2007. [Google Scholar]
- Zipfel, P.H. Modeling and Simulation of Aerospace Vehicle Dynamics, 2nd ed.; American Institute of Aeronautics and Astronautics: Gainesville, FL, USA, 2007. [Google Scholar]
- Kane, T.R.; Levinson, D.A. Dynamics Theory and Applications; The Internet-First University Press: Ithaca, NY, USA, 1985. [Google Scholar]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Electrical Engineers: Stevenage, UK, 2004; p. xvii+581. [Google Scholar]
- Bancroft, J.B.; Lachapelle, G. Data Fusion Algorithms for Multiple Inertial Measurement Units. Sensors 2011, 11, 6771–6798. [Google Scholar] [CrossRef] [PubMed]
- Chang, H.; Xue, L.; Qin, W.; Yuan, G.; Yuan, W. An Integrated MEMS Gyroscope Array with Higher Accuracy Output. Sensors 2008, 8, 2886–2899. [Google Scholar] [CrossRef] [PubMed]
- Beaudoin, Y.; Desbiens, A.; Gagnon, E.; Landry, R. Satellite launcher navigation aided by a stochastic model of the vehicle. In Proceedings of the Canadian Aeronautics and Space Institute Astronautics Conference (ASTRO’18 ), Marseille, France, 28 May–1 June 2018. [Google Scholar]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Bancroft, J.B. Multiple IMU integration for vehicular navigation. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2009), Portland, Oregon, 25–29 September 2017; Volume 2, pp. 1026–1038. [Google Scholar]
- Vachon, A. Trajectographie D’un Lanceur de Satellites Basée sur la Commande Prédictive. Ph.D. Thesis, Université Laval, Département de Génie Électrique et Génie Informatique, Québec, QC, Canada, 2012. [Google Scholar]
- Duplain, É. Contrôle D’un Lanceur de Satellite de Petite Taille. Master’s Thesis, Université Laval, Québec, QC, Canada, 2012. (In French). [Google Scholar]
- Beaudoin, Y.; Desbiens, A.; Gagnon, E.; Landry, R.J. Observability of satellite launcher navigation with INS, GPS, attitude sensors and reference trajectory. Acta Astronaut. 2018, 142, 277–288. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GPS Receiver | C/A Code with Wide Correlator |
|---|---|
| Attitude reference sensor noise standard deviation | |
| Gyroscope random walk (multi-IMUs) | |
| Gyroscope bias stability (multi-IMUs) | |
| Accelerometer random walk (multi-IMUs) | 117 g/ |
| Accelerometer bias stability (multi-IMUs) | 7500 g |
| Gyroscope random walk (single-IMU) | |
| Gyroscope bias stability (single-IMU) | |
| Accelerometer random walk (single-IMU) | 68 g/ |
| Accelerometer bias stability (single-IMU) | 4330 g |
| With GPS Receiver | Without GPS Receiver | ||||
|---|---|---|---|---|---|
| w/o Constraint | All Constraints | w/o Constraint | Attitude Constraint | ||
| Attitude | roll | ||||
| pitch | |||||
| yaw | |||||
| Velocity | x | ||||
| y | |||||
| z | |||||
| Position | x | ||||
| y | |||||
| z | |||||
© 2018 by Her Majesty the Queen in Right of Canada, Department of National Defence. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beaudoin, Y.; Desbiens, A.; Gagnon, E.; Landry, R., Jr. Satellite Launcher Navigation with One Versus Three IMUs: Sensor Positioning and Data Fusion Model Analysis. Sensors 2018, 18, 1872. https://doi.org/10.3390/s18061872
Beaudoin Y, Desbiens A, Gagnon E, Landry R Jr. Satellite Launcher Navigation with One Versus Three IMUs: Sensor Positioning and Data Fusion Model Analysis. Sensors. 2018; 18(6):1872. https://doi.org/10.3390/s18061872
Chicago/Turabian StyleBeaudoin, Yanick, André Desbiens, Eric Gagnon, and René Landry, Jr. 2018. "Satellite Launcher Navigation with One Versus Three IMUs: Sensor Positioning and Data Fusion Model Analysis" Sensors 18, no. 6: 1872. https://doi.org/10.3390/s18061872
APA StyleBeaudoin, Y., Desbiens, A., Gagnon, E., & Landry, R., Jr. (2018). Satellite Launcher Navigation with One Versus Three IMUs: Sensor Positioning and Data Fusion Model Analysis. Sensors, 18(6), 1872. https://doi.org/10.3390/s18061872