A Novel Strategy for Improving the Aeromagnetic Compensation Performance of Helicopters


Abstract
:1. Introduction
2. Aeromagnetic Compensation Model
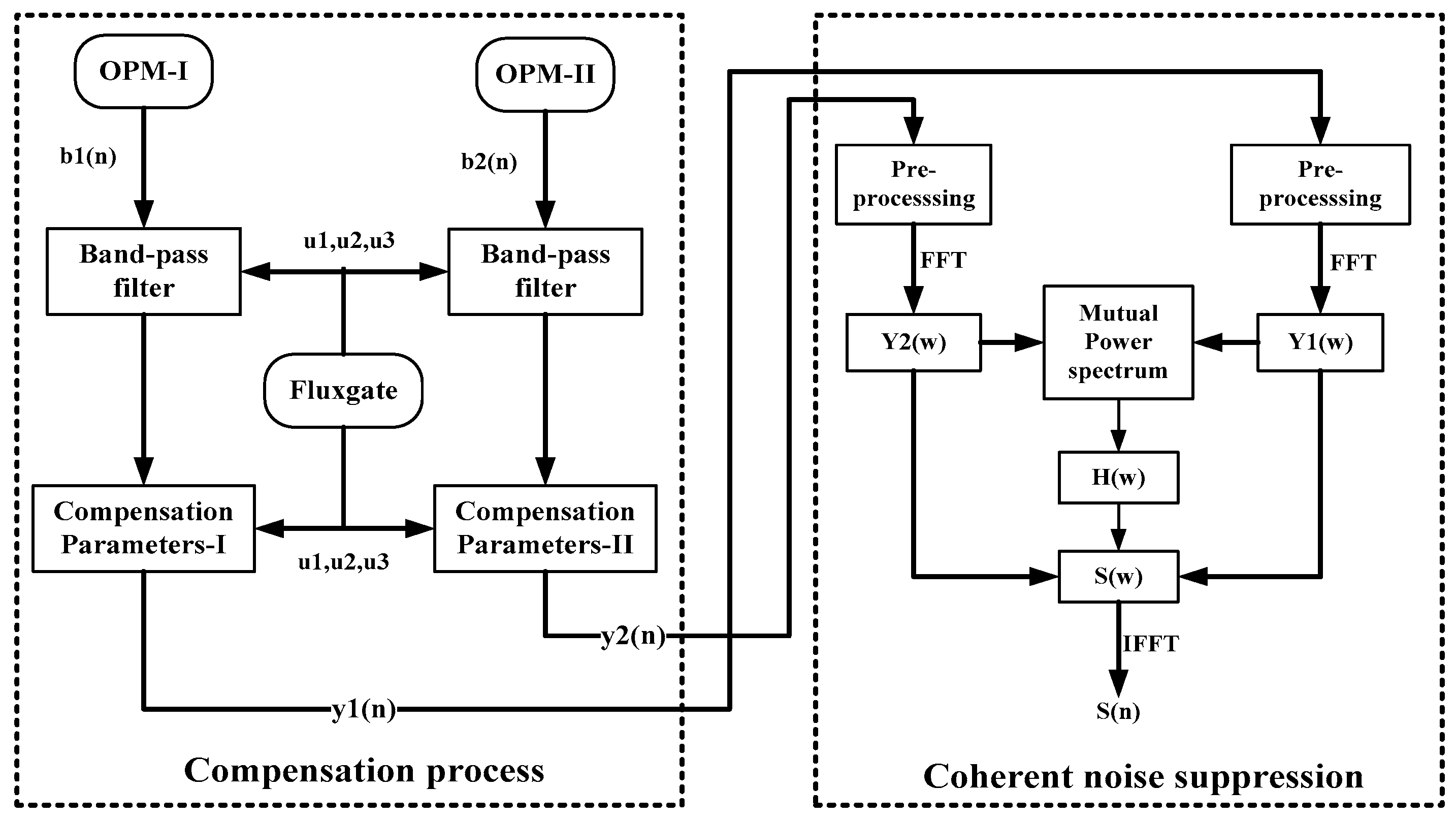
3. The Coherent Noise Suppression Method
3.1. The Mathematical Model
3.2. The Proposed Coherent Noise Suppression Method
4. Results and Discussion
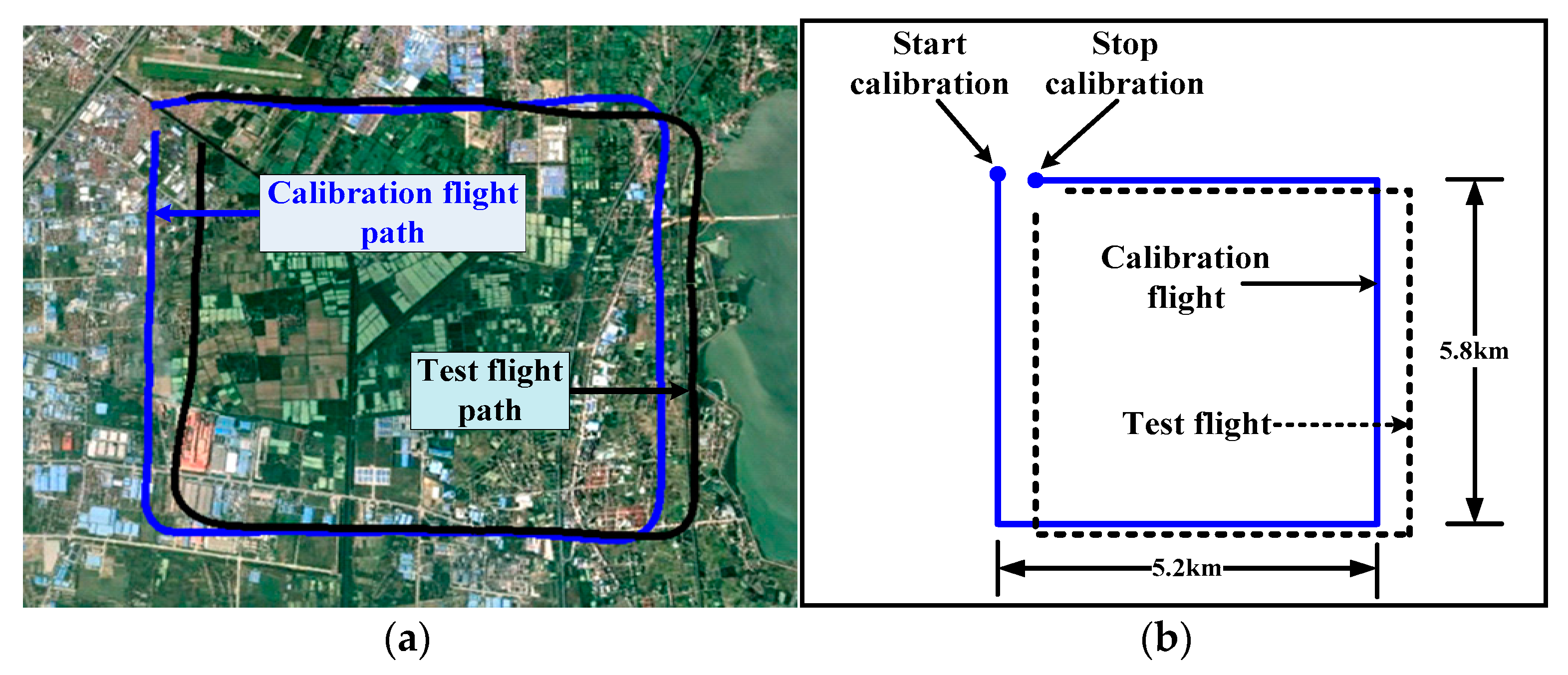
4.1. The Compensation and Test Flight
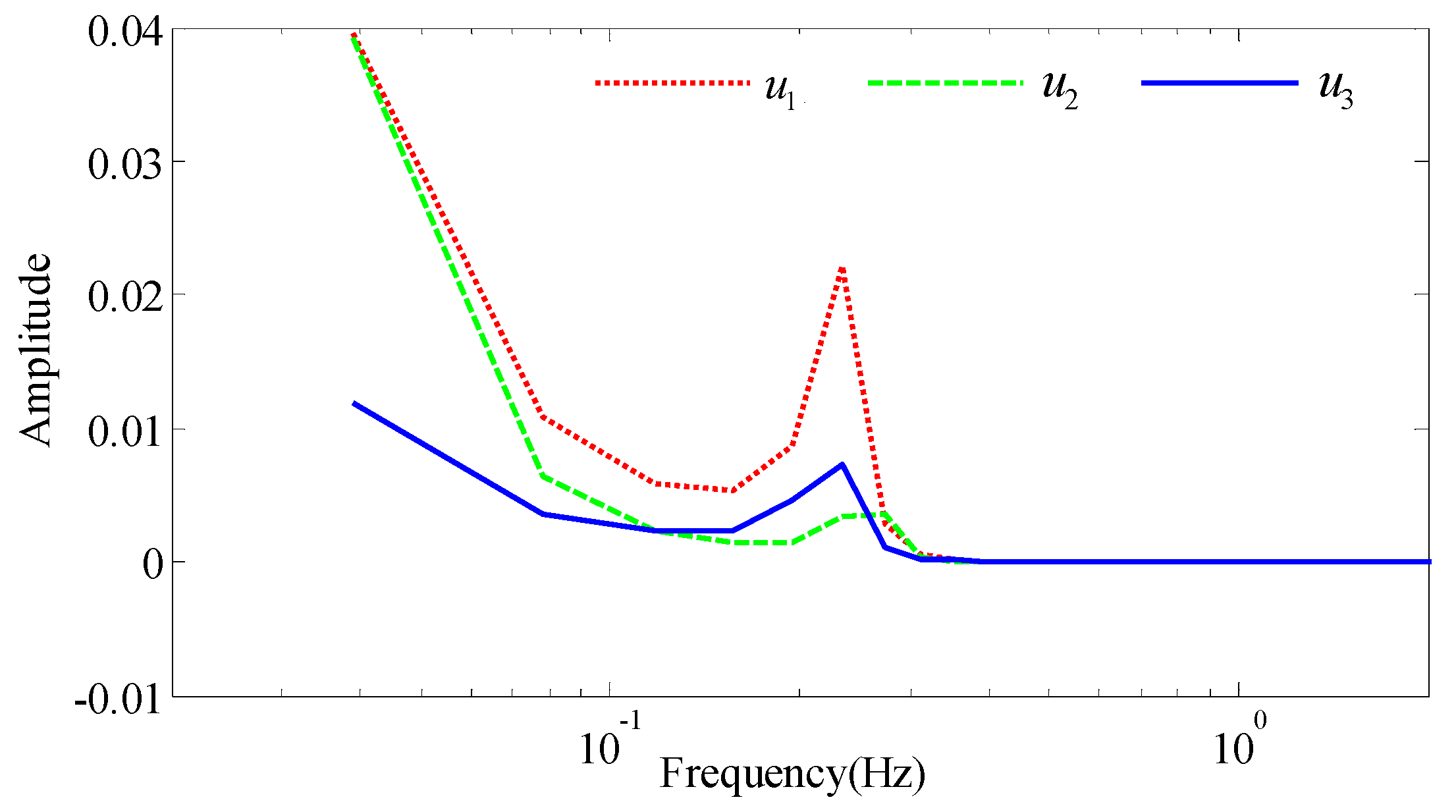
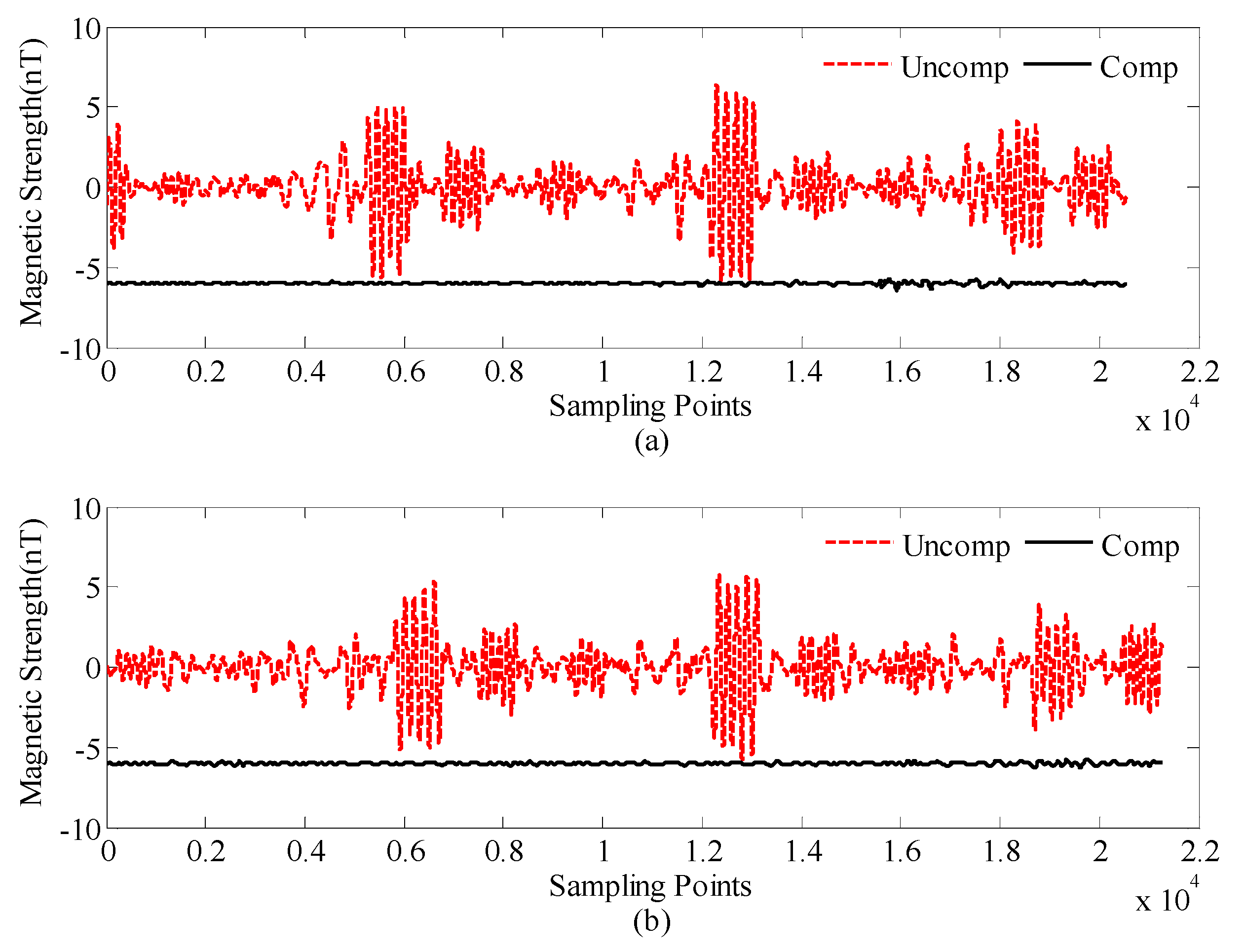
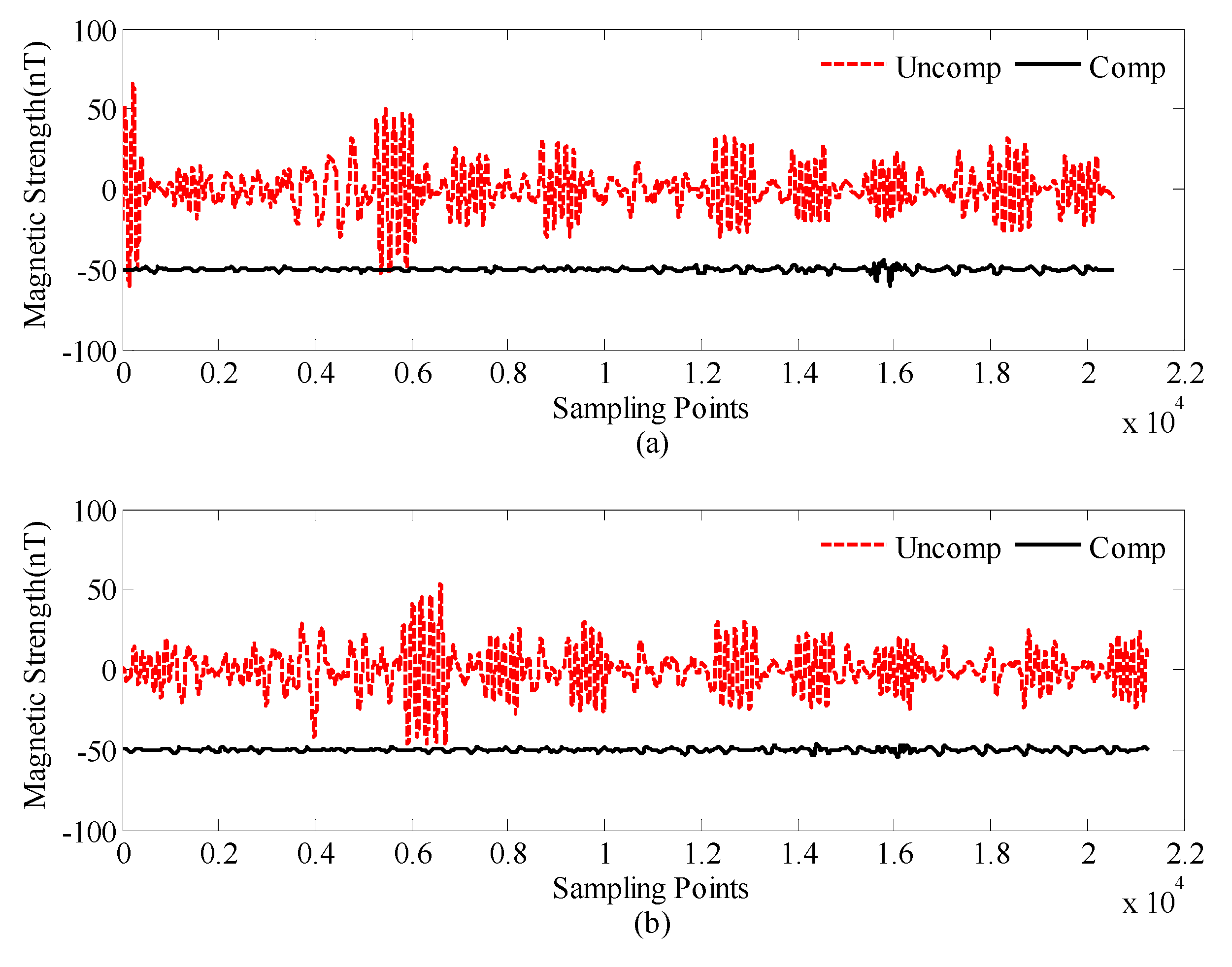
4.2. Compensation Parameters and Compensation Results
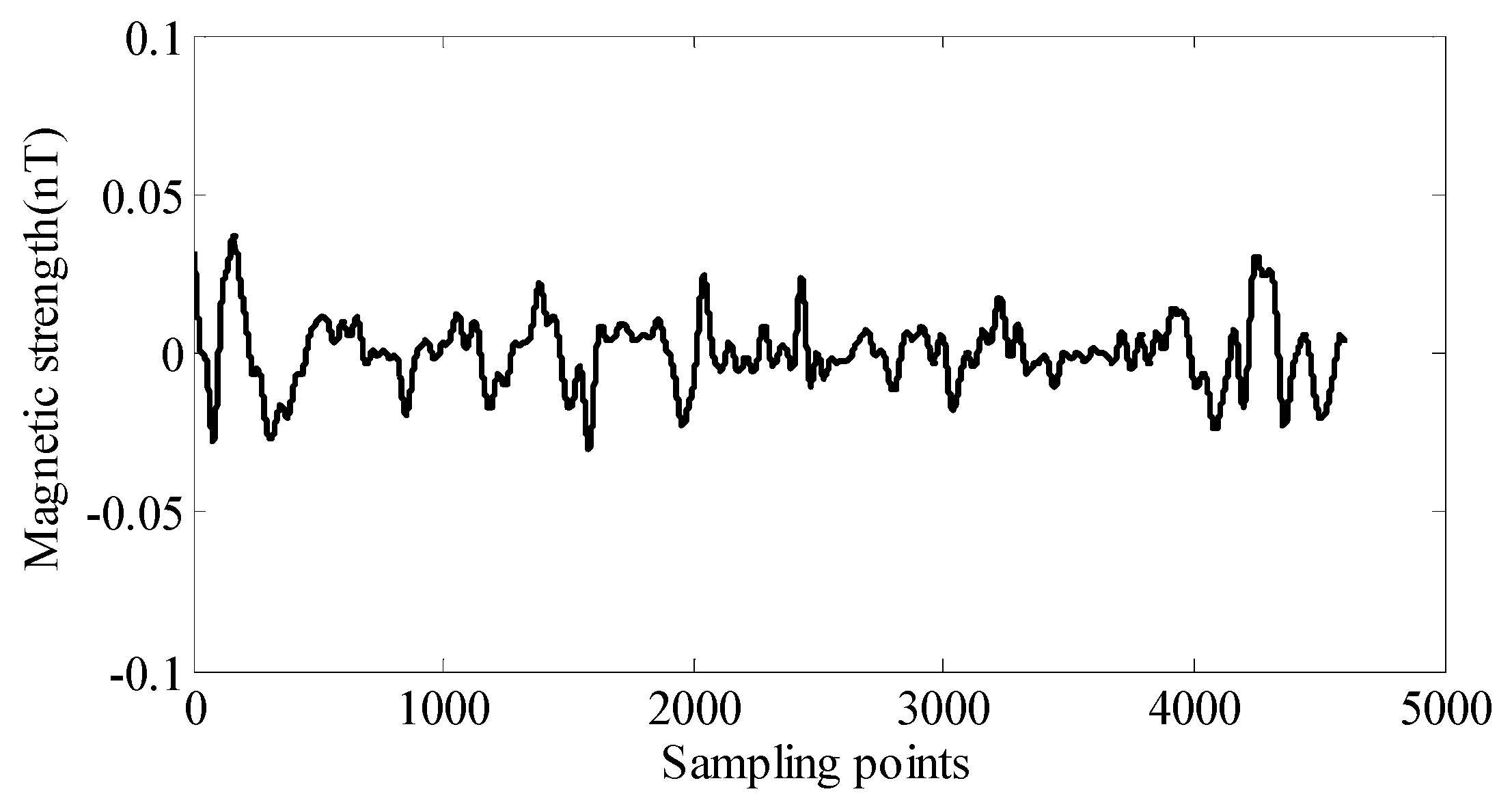
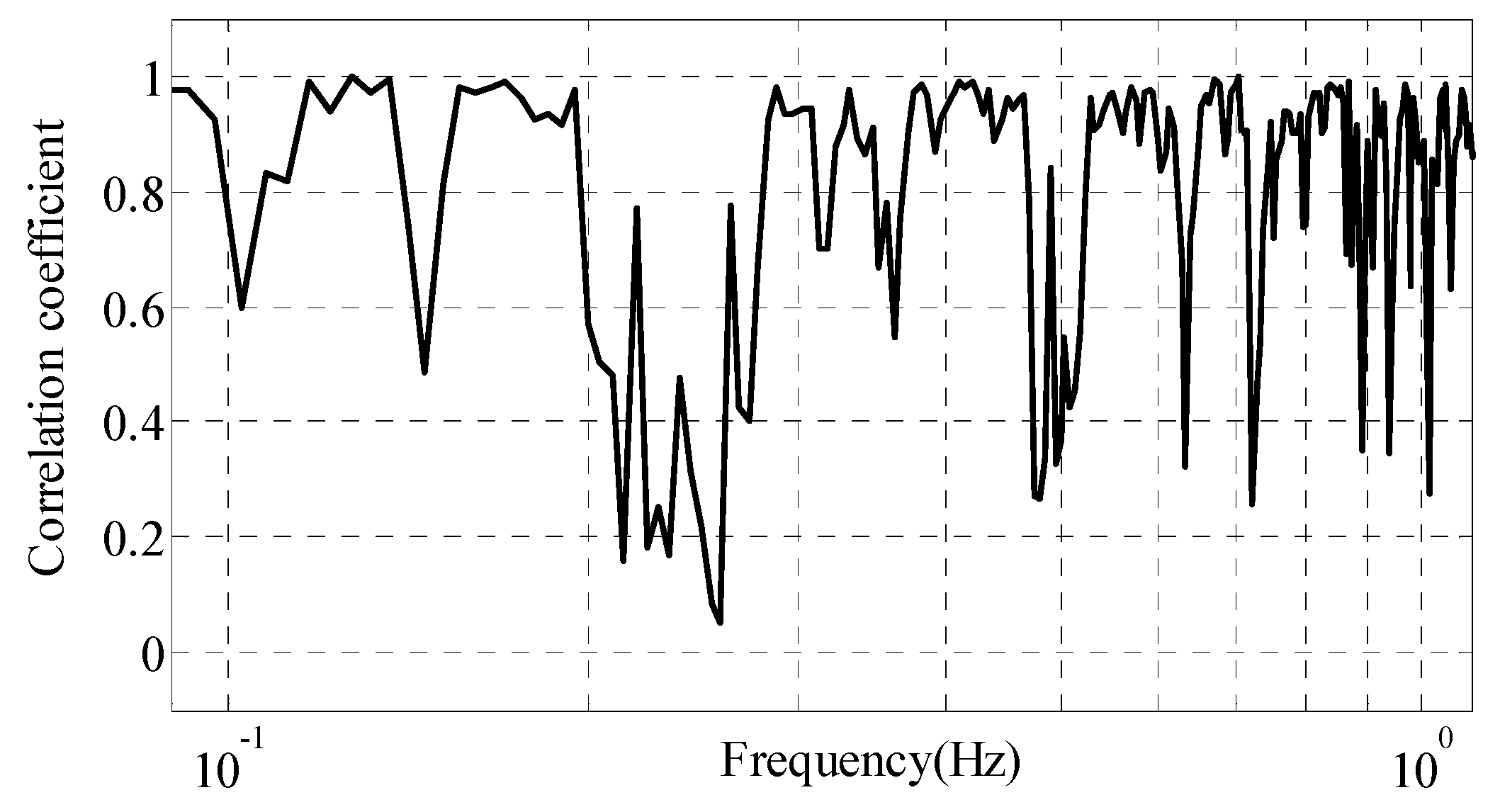
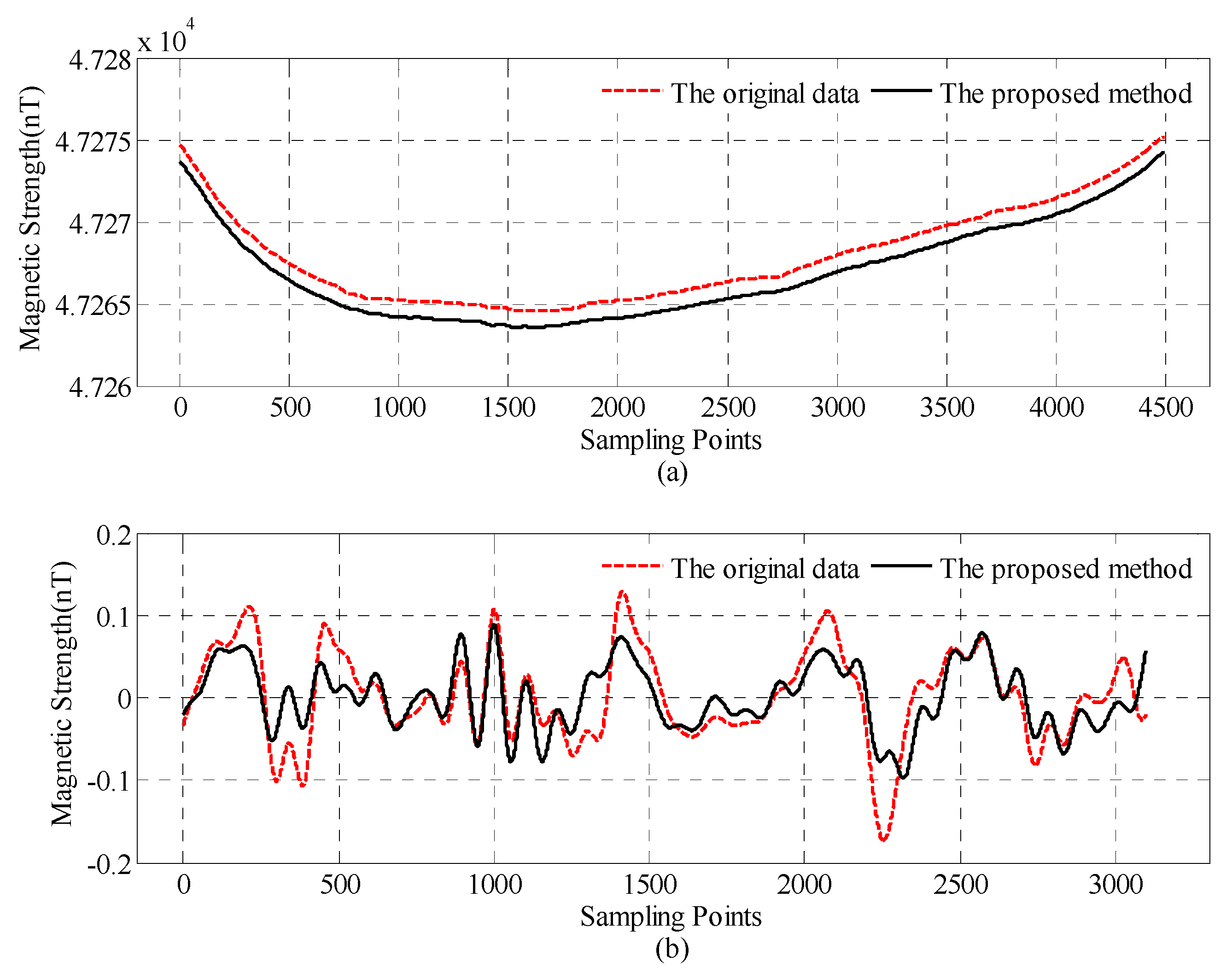
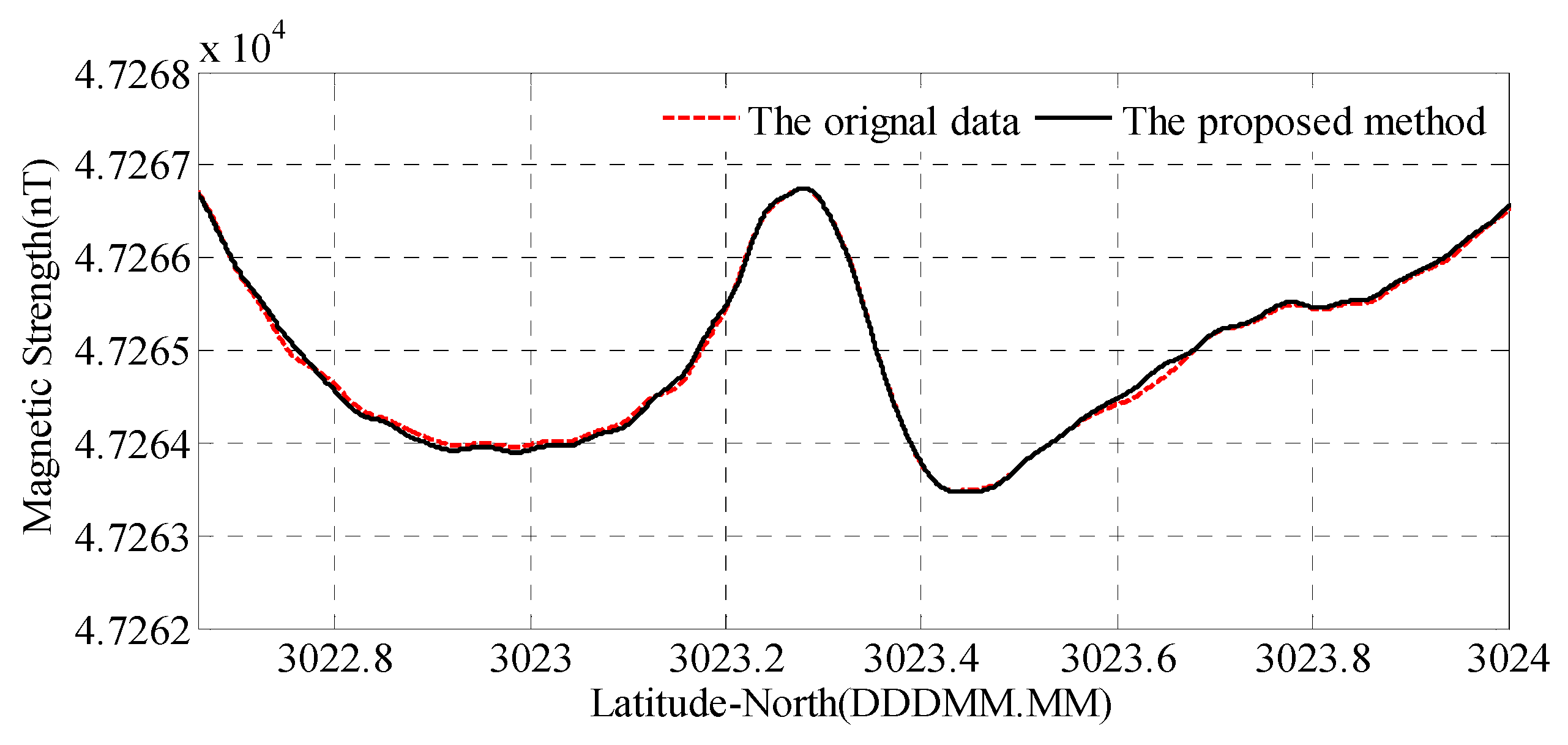
4.3. The Results and Discussion of the Proposed CNS Method
4.4. The Magnetic Anomaly Detection Experiment
5. Further Investigation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nabighian, M.N.; Grauch, V.J.S.; Hansen, R.O.; LaFehr, T.R.; Li, Y.; Peirce, J.W.; Phillips, J.D.; Ruder, M.E. The historical development of the magnetic method in exploration. Geophysics 2005, 70, 33–61. [Google Scholar] [CrossRef]
- Beard, L.P.; Doll, W.E.; Gamey, T.J.; Scott Holladay, J.; Lee, J.L.C.; Eklund, N.W.; Sheehan, J.R.; Norton, J. Comparison of Performance of Airborne Magnetic and Transient Electromagnetic Systems for Ordnance Detection and Mapping. J. Environ. Eng. Geophys. 2008, 13, 291–305. [Google Scholar] [CrossRef]
- Hood, P. History of aeromagnetic surveying in Canada. Lead. Edge 2007, 26, 1384–1392. [Google Scholar] [CrossRef]
- Doll, W.E.; Gamey, T.J.; Bell, D.T.; Beard, L.P.; Sheehan, J.R.; Norton, J.; Holladay, J.S.; Lee, J.L.C. Historical development and performance of airborne magnetic and electromagnetic systems for mapping and detection of unexploded ordnance. J. Environ. Eng. Geophys. 2012, 17, 1–17. [Google Scholar] [CrossRef]
- Zhang, C.D. The Past, Present and Future of the Satellite Magnetic Survey. Geophys. Geochem. Explor. 2003, 27, 329–332. [Google Scholar]
- Olsen, N.; Hulot, G.; Sabaka, T.J. Measuring the Earth’s Magnetic Field from Space: Concepts of Past, Present and Future Missions. Space Sci. Rev. 2010, 155, 65–93. [Google Scholar] [CrossRef]
- Hardwick, C.D. Non-oriented cesium sensors for airborne magnetometry and gradiometry. Explor. Geophys. 1984, 2, 266–267. [Google Scholar]
- Tolles, W.E.; Mineola, N.Y. Compensation of Aircraft Magnetic Fields. U.S. Patent US2692970A, 26 October 1954. [Google Scholar]
- Tolles, W.E.; Mineola, N.Y. Magnetic Field Compensation System. U.S. Patent US2706801A, 19 April 1955. [Google Scholar]
- Leliak, P. Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft. IRE Trans. Aerosp. Navig. Electron. 1961, 8, 95–105. [Google Scholar] [CrossRef]
- Leach, B.W. Aeromagnetic compensation as a linear regression problem. In Information Linkage between Applied Mathematics and Industry; Academic Press: New York, NY, USA, 1980; pp. 139–161. [Google Scholar]
- Hardwick, C.D. Aeromagnetic gradiometry in 1995. Explor. Geophys. 1996, 27, 1–11. [Google Scholar] [CrossRef]
- Zhang, B.; Guo, Z.; Qiao, Y. A simplified aeromagnetic compensation model for low magnetism UAV platform. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; Volume 24, pp. 3401–3404. [Google Scholar]
- Williams, P.M. Aeromagnetic compensation using neural networks. Neural Comput. Appl. 1993, 1, 207–214. [Google Scholar] [CrossRef]
- Deng, P.; Lin, C.; Tan, B.; Jian, Z. Application of adaptive filtering algorithm based on wavelet transformation in aeromagnetic survey. In Proceedings of the 3rd IEEE International Conference on Computer Science and Information Technology (ICCSIT), Chengdu, China, 9–11 July 2010; pp. 492–496. [Google Scholar]
- Lin, C.; Zhou, J.; Yang, Z. A method to solve the aircraft magnetic field model basing on geomagnetic environment simulation. J. Magn. Magn. Mater. 2015, 384, 314–319. [Google Scholar] [CrossRef]
- Dou, Z.; Ren, K.; Han, Q.; Niu, X. A Novel Real-Time Aeromagnetic Compensation Method Based on RLSQ. In Proceedings of the 2014 Tenth International Conference on Intelligent Information Hiding and Multimedia Signal Processing (IIH-MSP), Kitakyushu, Japan, 27–29 August 2014. [Google Scholar]
- Nelson, J.B. Aeromagnetic Noise during Low-Altitude Flights over the Scotian Shelf; DRDC-ATLANTIC, Defence R&D Canada: Ottawa, ON, Canada, 2002. [Google Scholar]
- Nelson, J.B. Predicting In-Flight Mad Noise from Ground Measurements; DRDC-ATLANTIC, Defence R&D Canada: Ottawa, ON, Canada, 2001. [Google Scholar]
- Woloszyn, M. Analysis of aircraft magnetic interference. Int. J. Appl. Electromagn. Mech. 2012, 39, 129–136. [Google Scholar]
- Noriega, G. Model stability and robustness in aeromagnetic compensation. First Break 2013, 31, 73–79. [Google Scholar] [CrossRef]
- Noriega, G. Performance measures in aeromagnetic compensation. Lead. Edge 2011, 30, 1122–1127. [Google Scholar] [CrossRef]
- Dou, Z.; Han, Q.; Niu, X.; Peng, X.; Guo, H. An Adaptive Filter for Aeromagnetic Compensation Based on Wavelet Multiresolution Analysis. IEEE Geosci. Remote Sens. 2016, 13, 1069–1073. [Google Scholar] [CrossRef]
- Han, Q.; Dou, Z.; Tong, X.; Peng, X.; Guo, H. A Modified Tolles-Lawson Model Robust to the Errors of the Three-Axis Strapdown Magnetometer. IEEE Geosci. Remote Sens. 2017, 14, 334–338. [Google Scholar] [CrossRef]
- The Brochure of CS-3 High Sensitivity CS Magnetometer Sensor. Available online: https://scintrexltd.com/wp-content/uploads/2017/03/CS-3-Brochure-762711_3.pdf (accessed on 19 May 2018).
- The Description of AARC510 Adaptive Aeromagnetic Real-Time Compensator. Available online: https://2117-ca.all.biz/aarc510-adaptive-aeromagnetic-real-time-g3383 (accessed on 19 May 2018).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| c1 | 32.5 | c2 | 4.24 | c3 | 7.84 |
| c4 | 5.90 × 10−3 | c5 | −2.71 × 10−6 | c6 | −2.09 × 10−5 |
| c7 | 6.20 × 10−3 | c8 | 1.74 × 10−4 | c9 | 5.80 × 10−3 |
| c10 | 8.28 × 10−4 | c11 | −7.46 × 10−5 | c12 | −1.84 × 10−5 |
| c13 | 5.42 × 10−5 | c14 | 6.72 × 10−4 | c15 | −6.75 × 10−5 |
| c16 | −6.57 × 10−5 | c17 | −1.65 × 10−5 | c18 | 8.69 × 10−4 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| c1 | 279.3 | c2 | 109.1 | c3 | −196.9 |
| c4 | 0.0767 | c5 | −8.11 × 10−5 | c6 | −1.75 × 10−4 |
| c7 | 0.080 | c8 | 1.95 × 10−3 | c9 | 0.0766 |
| c10 | 8.90 × 10−3 | c11 | −1.20 × 10−3 | c12 | 1.56 × 10−4 |
| c13 | 3.09 × 10−4 | c14 | 8.20 × 10−3 | c15 | −8.68 × 10−4 |
| c16 | −2.10 × 10−4 | c17 | 3.89 × 10−4 | c18 | 9.50 × 10−3 |
| Magnetometer | Flight | Uncompensated (nT) | Compensated (nT) | IR |
|---|---|---|---|---|
| OPM-I | Calibration | 1.5305 | 0.0649 | 23.6 |
| test | 1.4172 | 0.0654 | 21.67 | |
| OPM-II | Calibration | 13.8061 | 1.2283 | 11.24 |
| test | 12.3317 | 1.1055 | 11.15 |
| Magnetometer | Flight | Uncompensated (nT) | The CNS method (nT) | IR |
|---|---|---|---|---|
| OPM-I | Calibration | 1.5305 | 0.0453 | 33.78 |
| Test | 1.4172 | 0.0460 | 30.80 |
| Method | Standard Deviation (nT) | Peak to Peak Value (nT) |
|---|---|---|
| Original data | 0.0555 | 0.297 |
| CNS method | 0.0390 | 0.184 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Wu, P.; Zhu, W.; Feng, Y.; Fang, G. A Novel Strategy for Improving the Aeromagnetic Compensation Performance of Helicopters. Sensors 2018, 18, 1846. https://doi.org/10.3390/s18061846
Chen L, Wu P, Zhu W, Feng Y, Fang G. A Novel Strategy for Improving the Aeromagnetic Compensation Performance of Helicopters. Sensors. 2018; 18(6):1846. https://doi.org/10.3390/s18061846
Chicago/Turabian StyleChen, Luzhao, Peilin Wu, Wanhua Zhu, Yongqiang Feng, and Guangyou Fang. 2018. "A Novel Strategy for Improving the Aeromagnetic Compensation Performance of Helicopters" Sensors 18, no. 6: 1846. https://doi.org/10.3390/s18061846
APA StyleChen, L., Wu, P., Zhu, W., Feng, Y., & Fang, G. (2018). A Novel Strategy for Improving the Aeromagnetic Compensation Performance of Helicopters. Sensors, 18(6), 1846. https://doi.org/10.3390/s18061846