1. Introduction
With the development of missile technology, even higher accuracy of navigation is requested. Single navigation mode cannot satisfy the application requirement. Because of the uncertainty in the actual navigation system, a number of algorithms have been designed to improve the accuracy of state estimation [
1]. To sum up, the navigation accuracy of ballistic missile has focused on two parts, navigation system construction and navigation filter algorithm designation.
For navigation system construction, a number of navigation modes have been designed to improve navigation accuracy. Among these modes, the strap-down inertial navigation system (SINS) has been playing an important role among navigation systems for several decades [
2,
3,
4]. It can autonomously achieve a navigation mission completely relying on micro electro mechanical systems (MEMS) and has a strong anti-interference capability. Moreover, the attitude, the velocity, and the position of ballistic missiles can be easily obtained by its output information. However, the accumulated navigation errors caused by the inertial components cannot be avoided, especially in the long-term missile navigation [
5]. Therefore, in the practical situations, some other supporting facilities, including the Global Navigation Satellite System (GNSS), BeiDou Navigation Satellite System (BDS), the Doppler Velocity Log (DOL), and the celestial navigation system (CNS), are always integrated with SINS for the purpose of improving navigation accuracy [
6,
7]. However, GNSS is always susceptible to interference, which will have a strong impact on missile performance. DOL is always used underwater and is limited by the distance, which is not appropriate for long-distance missiles. The CNS is a navigation system that calculates the accurate attitude on the basis of measuring the azimuth of a celestial body through the celestial sensor. Because the source of information in the CNS is a celestial body, it has many merits, such as good concealment, strong autonomy, and high navigation accuracy, but the output frequency is much lower and discontinuous, and the output information can be easily influenced by surroundings [
8,
9,
10]. Hence, the CNS is frequently used for the purpose of assisting the SINS in the aerospace field, utilizing the SINS/CNS integrated navigation system. The SINS/CNS integrated navigation system can correct the attitude error and the gyro drift using the starlight information and greatly improve navigation accuracy [
11]. At present, it is an important developing direction for missile, airplane, and spacecraft navigation technology [
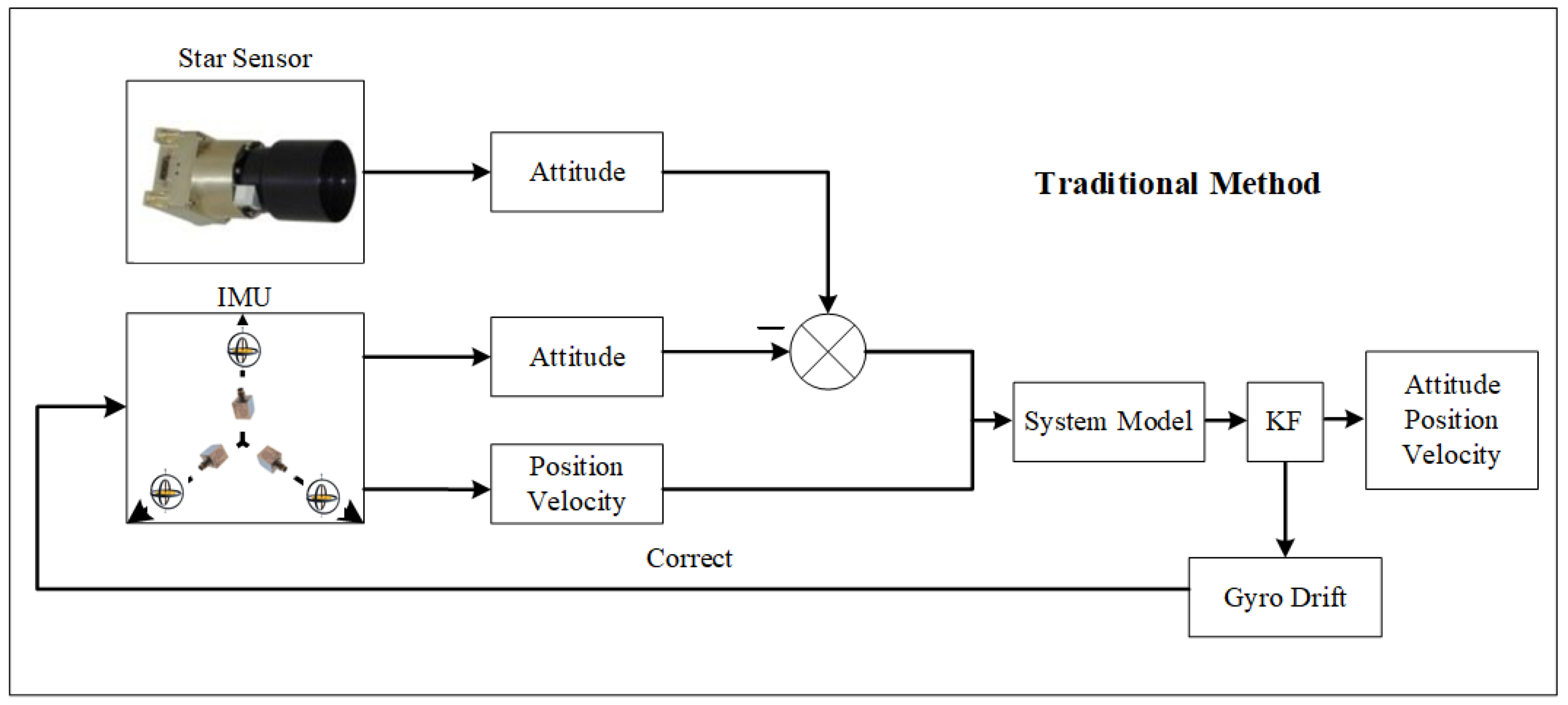
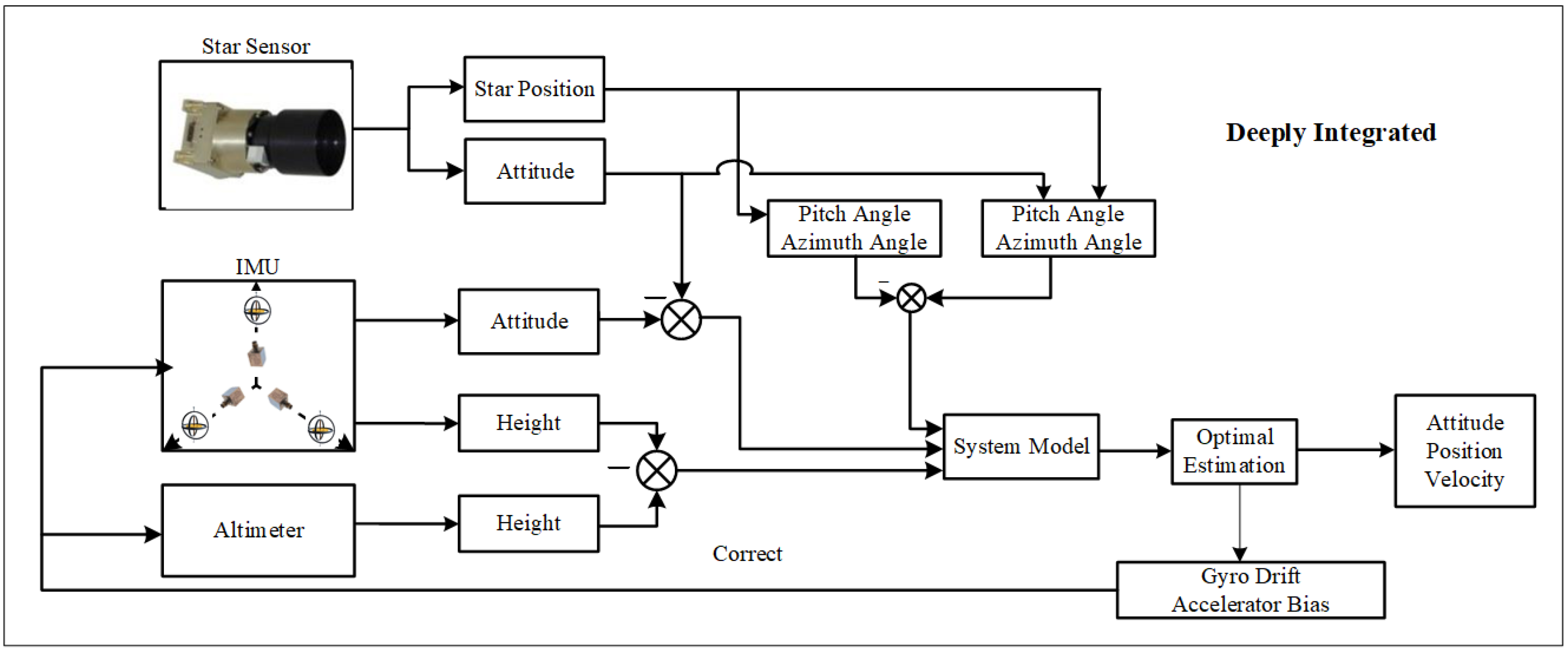
12]. Nevertheless, the traditional system only makes use of the information of star sensors to reckon the gyro drift, but it cannot estimate the accelerometer bias, which leads to position divergence. Therefore, some improved SINS/CNS integrated navigation systems have been proposed [
4,
13,
14]. They make use of more astronomical observation information to realize SINS/CNS deeply integrated navigation systems and effectively improve their performance.
For navigation filter design, many algorithms have been applied to the navigation system. The Kalman filter (KF) is the most popular optimal state estimation method used for the linear dynamic system [
15]. However, for navigation systems, the navigation system equation is always nonlinear [
16]. The frequently used nonlinear algorithms for solving nonlinear problems mainly include the extended Kalman filter (EKF) [
17] and the unscented Kalman filter (UKF) [
18]. EKF is a popular nonlinear extension of the KF, which uses Taylor series expansions to approximate the nonlinear system. However, the Taylor series expansions in many navigation systems are cumbersome and always lead to implementation difficulties [
15]. The iterated extened Kalman filter (IEKF) overcomes the problem and improves the accuracy with the Gauss-Newton method [
19]. Furthermore, the nonlinear iterated filter (NIF) improves the stability of the Jacobian matrix in the EKF and the IEKF through the Levenberg–Marquardt algorithm [
20]. In the UKF, a set of selected sigma points are used to approximate the probability distribution function of the state and propagate through the nonlinear process and the measurement equation. Thus, the UKF saves the trouble of calculating the Taylor series is more accurate than the EKF. The posterior linearization filter (PLF), using statistical linear regression, is a newly proposed algorithm to improve the filter accuracy based on sigma-point approximations [
21]. However, the filters above are always used to deal with Gaussian white noise. Nevertheless, owing to the operational error or the complex atmospheric environment, the non-Gaussian noises, such as large outliers and Gaussian mixture noises, often exist during the actual navigation process.
For non-Gaussian process, many nonlinear filters do not perform satisfactorily [
22]. However, the filter robustness can be improved through the approaches as follows:
A classical method involves creating filters directly for the systems under the conditions of non-Gaussian noises to deal with noises with different heavy-tailed distributions [
23,
24]. However, it is difficult to take effect in multidimensional situations, which limits its applicability [
25].
There are two efficient methods to handle non-Gaussian noises based on estimating the a posteriori probability density with a series of samples. The UKF approximates the mean and the covariance of the state estimation using unscented transformation (UT) through sigma points [
26]. The ensemble Kalman filter (EnKF) is another algorithm to capture state estimation using samples set for the purpose of handling non-Gaussian noises [
27].
Another popular method is the Huber-based Kalman filter. It is a robust state estimator to handle the non-Gaussian noises based on the robust estimation theory [
28]. Many navigation and target problems were often handled through it under the conditions of non-Gaussian noises in the past few years [
29,
30,
31,
32].
Chang [
33] proposed a new robust Kalman filter in recent years. He defined a judging index calculating the difference between the observation and the prediction based on Mahalanobis distance to solve the outliers, which can also successfully solve the observation noises that obey the thick-tailed distribution during the actual observation process.
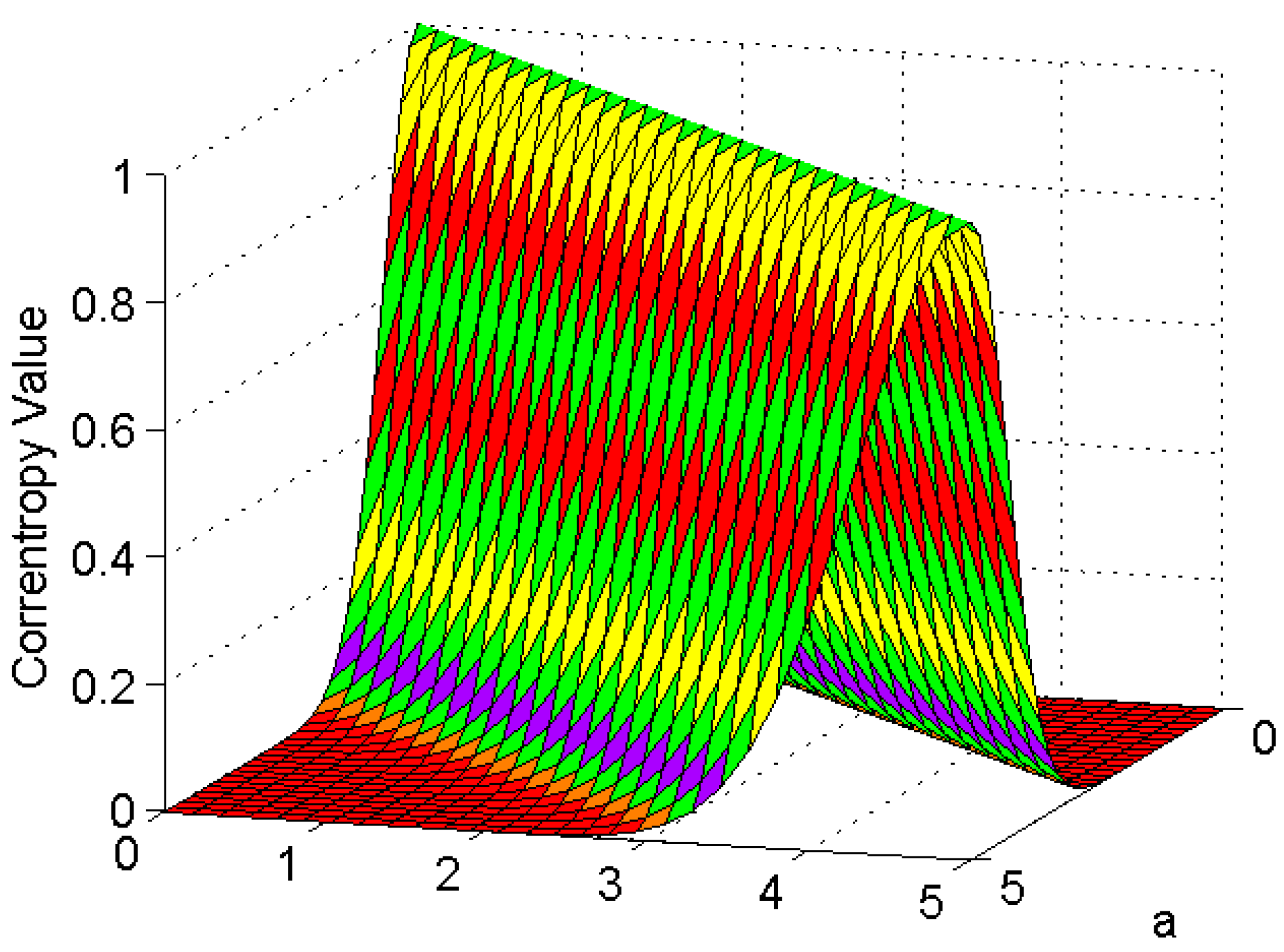
Maximum correntropy criterion (MCC) is an information theoretic method proposed in recent years. It has been applied to the Bayesian estimation and the error analysis [
34,
35]. The maximum correntropy Kalman filter (MCKF), which is an improved Kalman filter algorithm using the MCC theory, is one of the latest designed estimators for the purpose of solving non-Gaussian noises. In addition, the maximum correntropy extended Kalman filter (MCEKF) and the maximum correntropy unscented Kalman filter (MCUKF) are proposed for the nonlinear system [
36], and the MCUKF has been proven to show a better performance than MCEKF [
37]. However, its robustness is not analyzed and it has not been applied to SINS/CNS deeply integrated navigation.
The key contributions of this paper are expressed as follows. First of all, the observability of the new deeply integrated navigation system is analyzed. The MCUKF is then deduced on the basis of maximum correntropy theory and unscented transformation to deal with the nonlinearity and non-Gaussian noises in the navigation system. The computational complexity of it is also analyzed. Furthermore, the robustness of the MCUKF is discussed under the condition of the non-Gaussian noises. Finally, the conditions of non-Gaussian noise, mainly including the large outliers and the Gaussian mixture noises, existing in SINS/CNS deeply integrated navigation are effectively handled by the MCUKF.
The organization of this paper proceeds as follows. SINS/CNS deeply integrated navigation is briefly reviewed and the observability is analyzed in
Section 1. In
Section 2, the algorithm steps are designed for the MCUKF and the robustness performance is analyzed compared with a Huber-based filter. In
Section 3, simulations are demonstrated to compare the performances using several filter methods under the conditions of different kinds of noises. Finally, we draw conclusions in
Section 4.
4. Simulation Results
In this section, the superiority of SINS/CNS deeply integrated navigation is proved firstly. The performances of the MCUKF are then illustrated under the conditions of the Gaussian noises, the large outliers, and the Gaussian mixture noises, respectively. The estimation performance are compared on the basis of the following indices:
where
m is the simulation time steps and
L represents the total simulation numbers. In addition, the time cost of every method is given to compare the computational complexity. All methods are implemented in the same precision (64-point floating point) in MATLAB running on a PC with processor Intel(R) Core(TM) i7-7500U CPU 2.70GHz and with 8 GB of installed memory (RAM).
The simulation parameters are as
Table 3.
The missile trajectory is shown in
Figure 5.
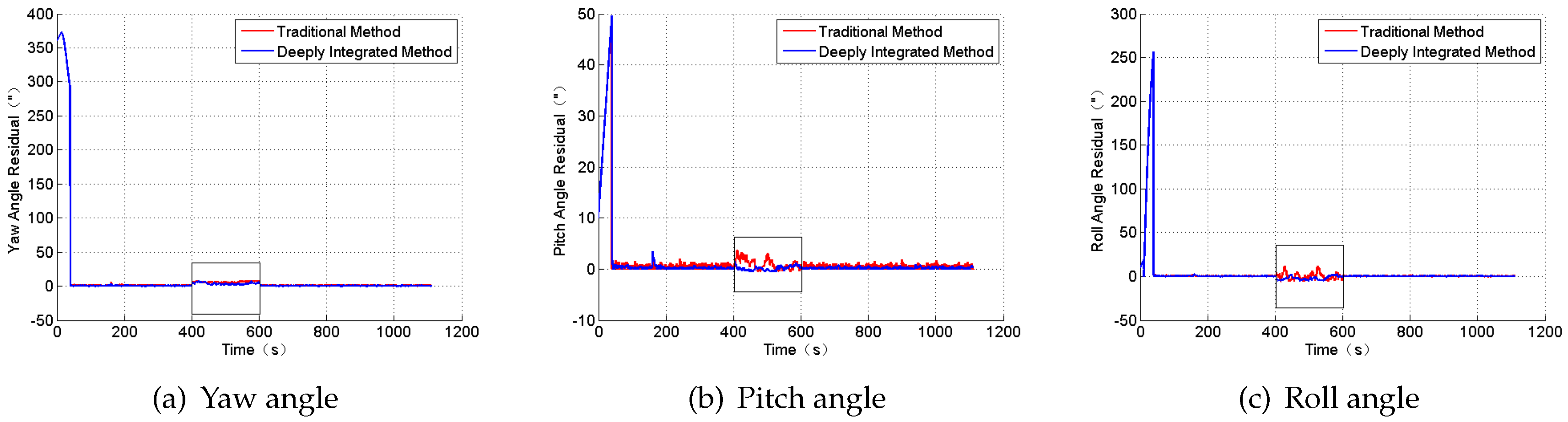
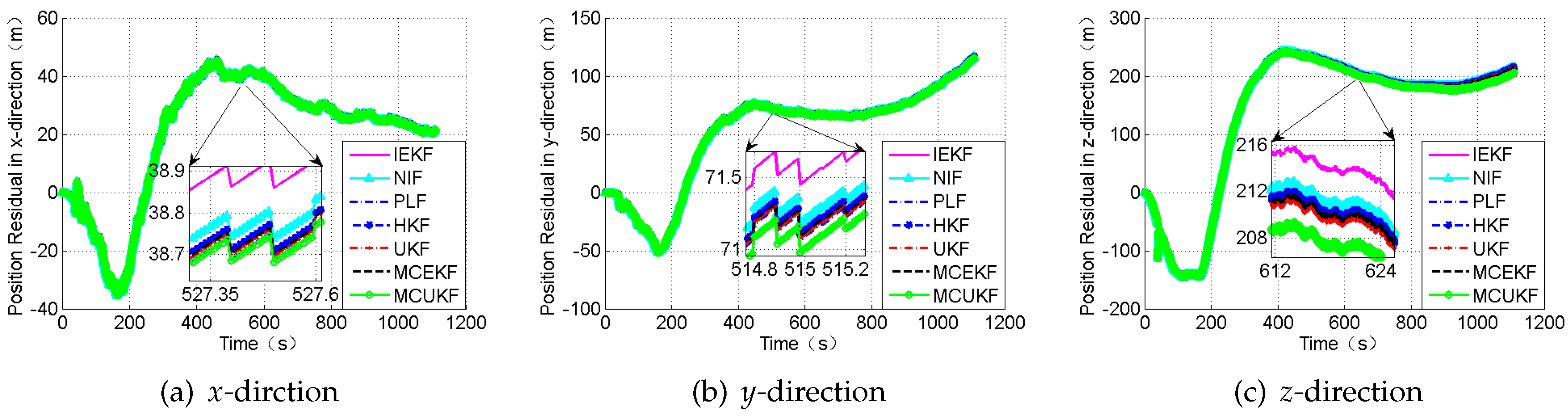
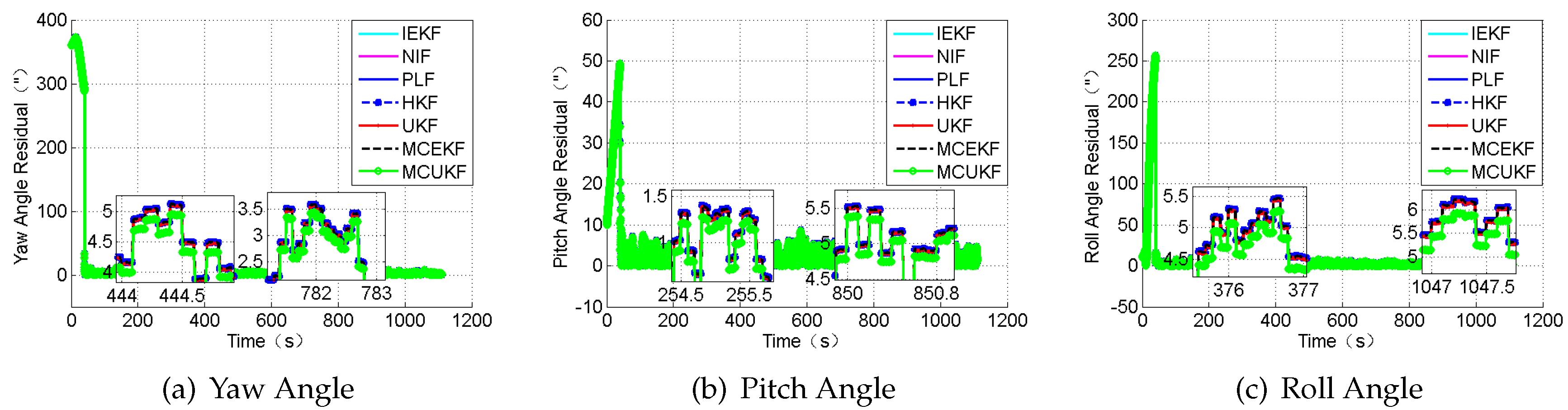
To prove the high performance of the new integrated navigation system, a simulation is done only under the condition of the Gaussian white noises. Compared with the traditional integrated mode, the position and the attitude angle residual are shown in
Figure 6 and
Figure 7.
The RMSE of the position and attitude angle and the time cost of every filter are shown in
Table 4.
From the Figures and the table above, the navigation position error has evidently improved when constructing the measurement
in Equation (
12). In addition, the SINS/CNS deeply integrated navigation mode for the ballistic missile can tackle the divergence of the position error effectively, which obeys the observability analysis results. However, the newly proposed navigation system needs more time to gain the results.
Next, we will compare the MCUKF performance with other algorithms under the conditions of the Gaussian noises, the large outliers, and the Gaussian mixture noises for SINS/CNS deeply integrated navigation.
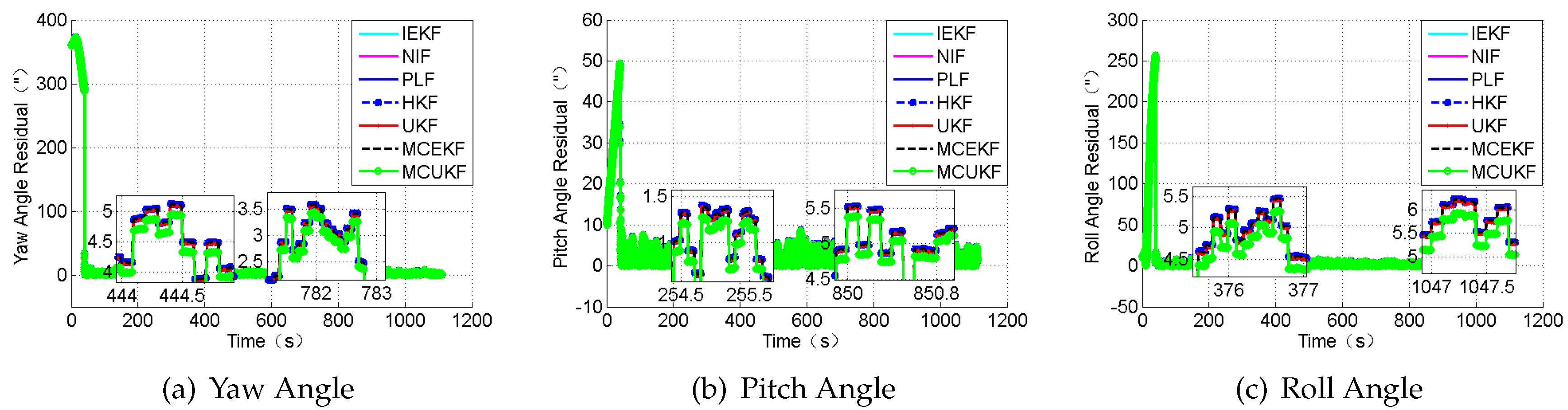
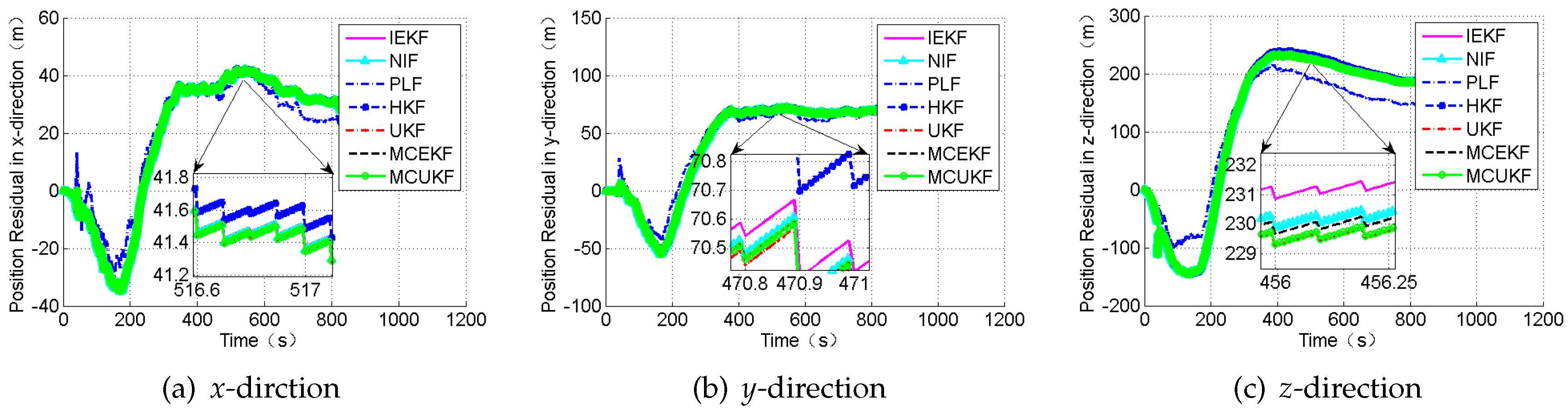
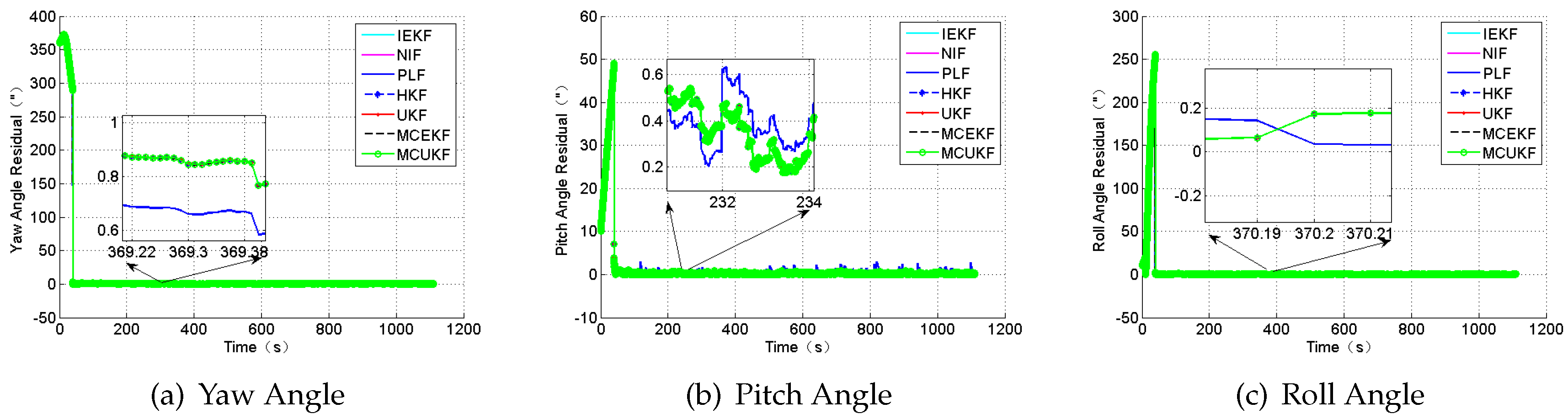
4.1. Case 1: Gaussian Noises
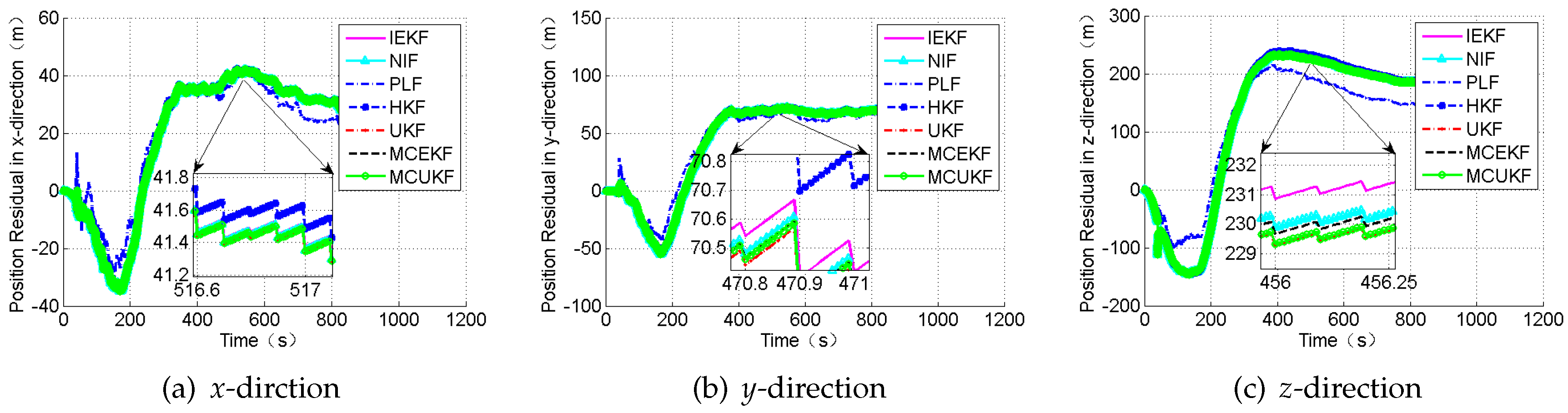
In this section, we will apply the MCUKF on SINS/CNS deeply integrated navigation under the conditions of the Gaussian noises to compare performances with other filter algorithms including the HKF [
55], the IEKF, the NIF, the PLF, the UKF, and the MCEKF [
36]. The simulation parameters are set as
Table 1. The simulation results are shown in
Figure 8 and
Figure 9, and
Table 5.
According to
Table 5, PLF demonstrates the highest accuracy among the seven filters in this condition because of the a posteriori estimation and the iteration. It can be observed that robust filters cannot always perform as well as the PLF, the NIF, or the UKF under the condition of the Gaussian noises.
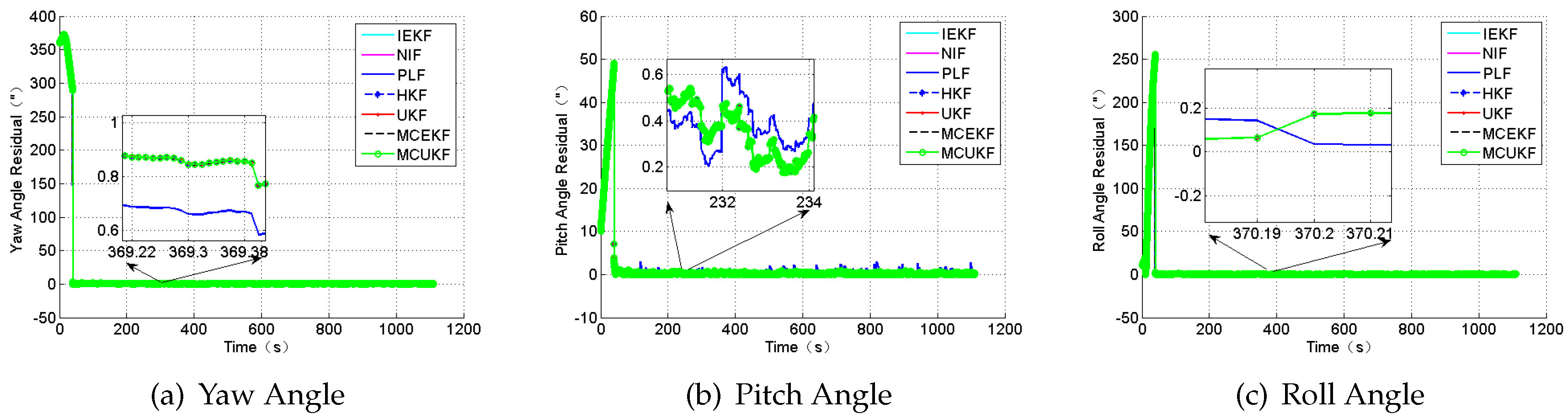
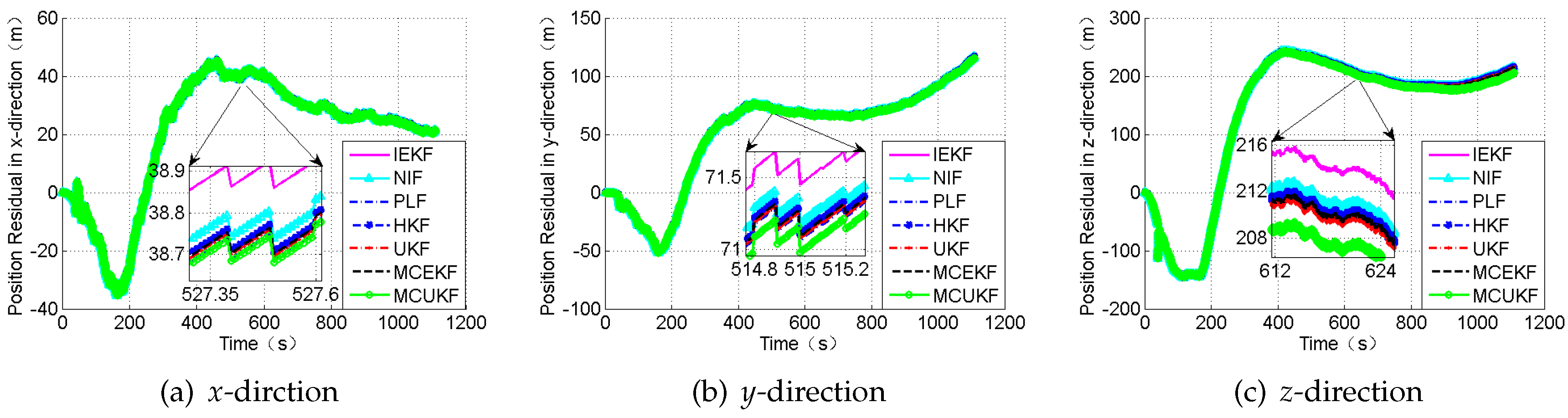
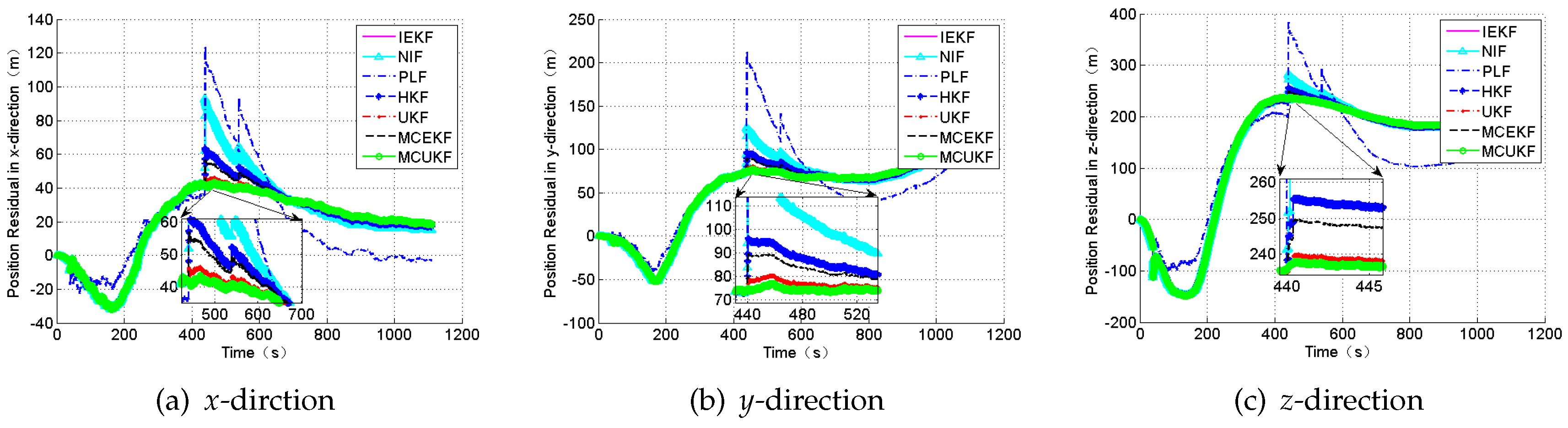
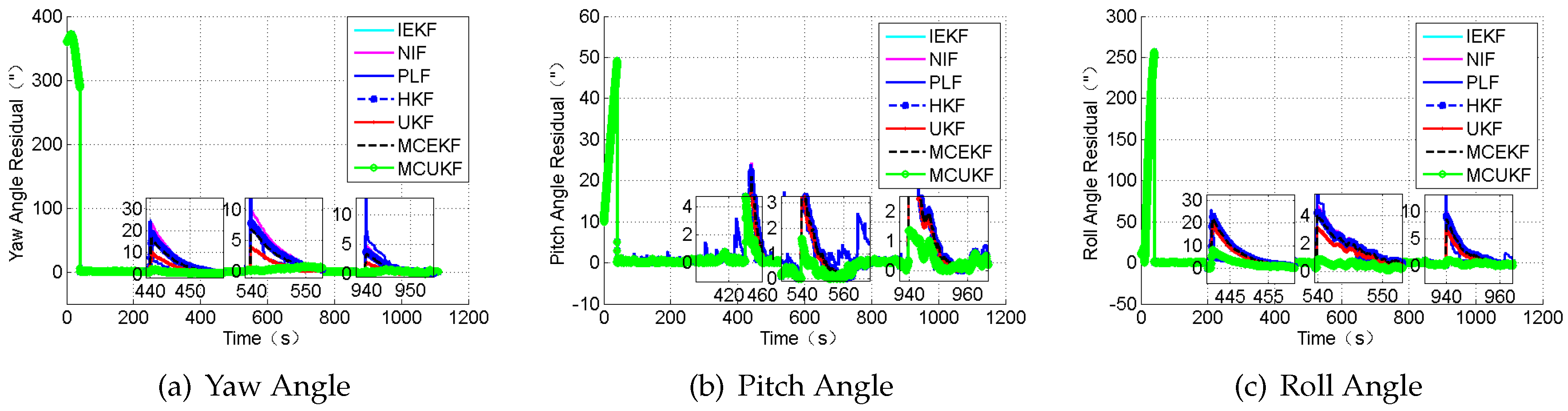
4.2. Case 2: Large Outliers
In this section, the case in which the measurement value including large outliers is considered. The attitude outliers are added artificially to the attitude angle data at the 5000
th and 9000
th epochs, respectively. The position outliers are also added artificially to the position data at the 5000
th epochs. The constant outliers are added to all epochs between the 4001
th to the 4005
th to the attitude angle data. The constant outliers are added to all epochs between 4001
th and the 4005
th to the position data. The obtained position errors and the attitude angle errors are displayed in
Figure 10 and
Figure 11, and
Table 6.
According to the presented results, it can be concluded that, in the presence of outliers, the filter results mostly depend on the outliers. In addition,
Figure 10 and
Figure 11 show that the HKF, the MCEKF, and the MCUKF can resist the influence of the outliers to some extent. Furthermore, the two figures show that the MCUKF has better performance than the other algorithms, so the influence of the single and the constant outliers is reduced using the MCUKF algorithm. The RMSE values and time cost of all used filters are presented in
Table 6.
Compared with other filters, the filtering algorithm of the MCEKF and the MCUKF is improved to a certain degree, especially for the outliers. The MCUKF has better performance than other filters and lower time cost than the iterated filters.
4.3. Case 3: Gaussian Mixture Noises
In this section, the case in which the measurement noises are the Gaussian mixture noises, whose distributions are as follows:
Star Sensor Noise: .
Altimeter Noise: .
Figure 12 and
Figure 13 reveal the residual using different filters under the conditions of the Gaussian mixture noises. In addition,
Table 7 illustrates the RMSE of the position, the attitude angle, and the time cost of every method. It can be observed that the MCUKF achieves better performance than other filters.
5. Conclusions
SINS/CNS deeply integrated navigation, which consists in modified SINS/CNS navigation, is introduced, and the observability of the navigation system was analyzed. However, the simulation results demonstrate that the new system needs more time. Measurement noises are often the research focus with regard to navigation systems. The non-Gaussian noises, including the large outliers and the Gaussian mixture noises, always exist during the measurement process. On the basis of the maximum correntropy theory, the maximum correntropy unscented Kalman filter (MCUKF) is a newly designed robust unscented Kalman filter (UKF). The robustness for state estimation, which can resist the effects of non-Gaussian noises effectively, is also analyzed and compared with a Huber-based filter. Simulated experimental results demonstrate that the MCC-based filter provides much better performance when tackling the non-Gaussian noises of SINS/CNS deeply integrated navigation, but with a higher computational complexity than the traditional UKF.
In practical applications, the added star sensors and the altimeter of the deeply integrated system will increase the load of the missile. Future work will focus on the installation method of the measurement facilities and applications in real scenarios. The coupled problem of multiple sensors may also need to be solved.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}