Improved Spatial Registration and Target Tracking Method for Sensors on Multiple Missiles

Abstract
:1. Introduction
- A new spatial registration algorithm is first proposed for sensors on high-speed moving vehicles, realizing the simultaneous estimation for system and attitude biases which are compensated to the biased measurements of the tracking schemes. The accuracy and robustness of the estimation of target state are effectively improved.
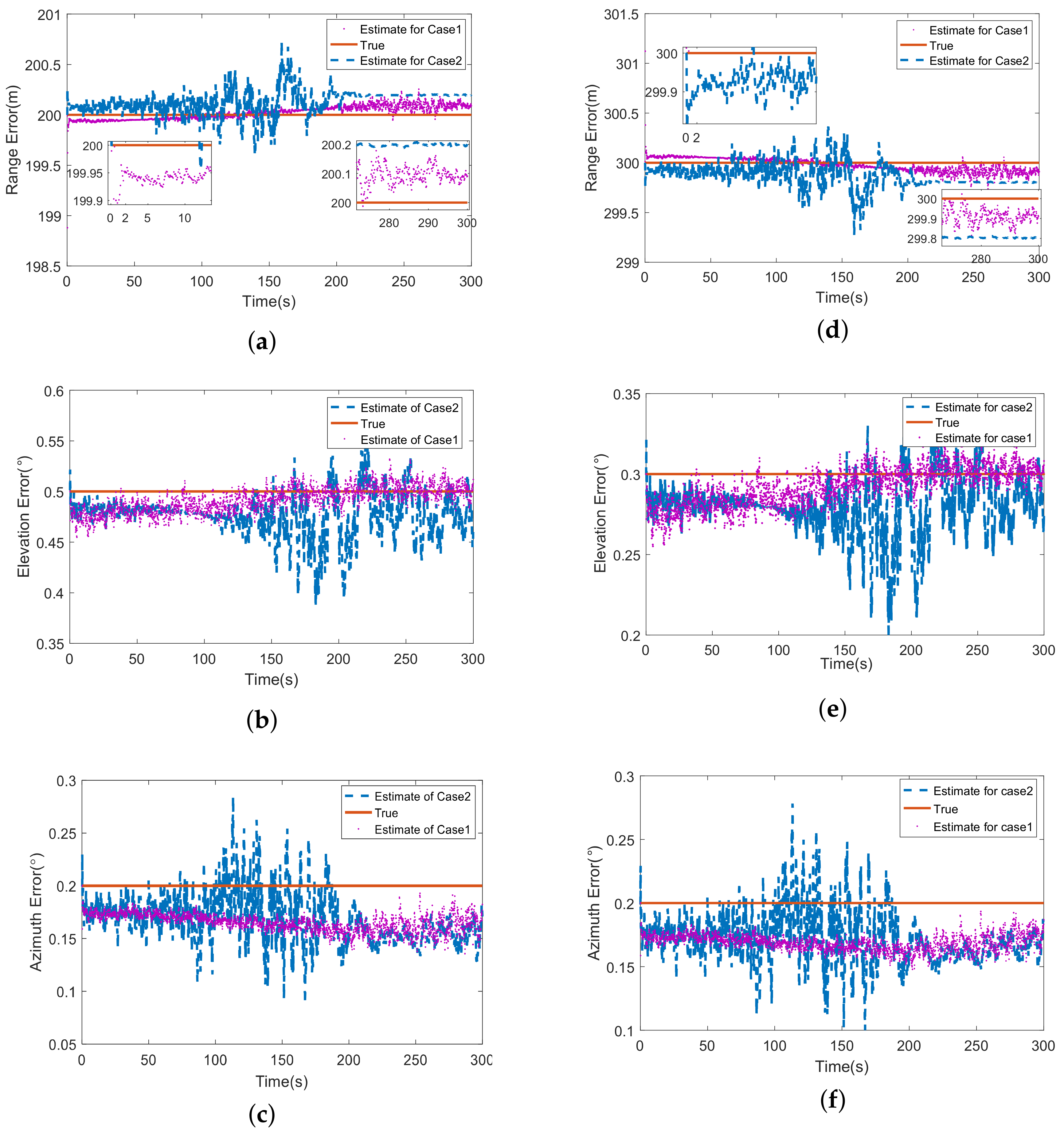
- Inspired by the ideal of integral controller, a Low-pass filter is used when the position relationship between missiles and target meets the special condition to inhibit the jitter of estimations. This skill improve the adaptability of tracking system without time-delay caused by the common integral controllers.
2. Coordinate Defination and Transformation
2.1. Definition of Coordinate System
2.2. Transformation between Reference Frames
3. Registration Algorithm
- The attitude biases and the measured deviations are considered as constant and the attitude biases are assumed as small values.
- The coupling between biases is ignored.
- The position errors of sensors are not considered. It means the positions are known exactly with other possible assistant device (e.g., GPS).
3.1. Attitude and Sensor Measurement Errors
3.2. Traditional ECEF-KF Algorithm
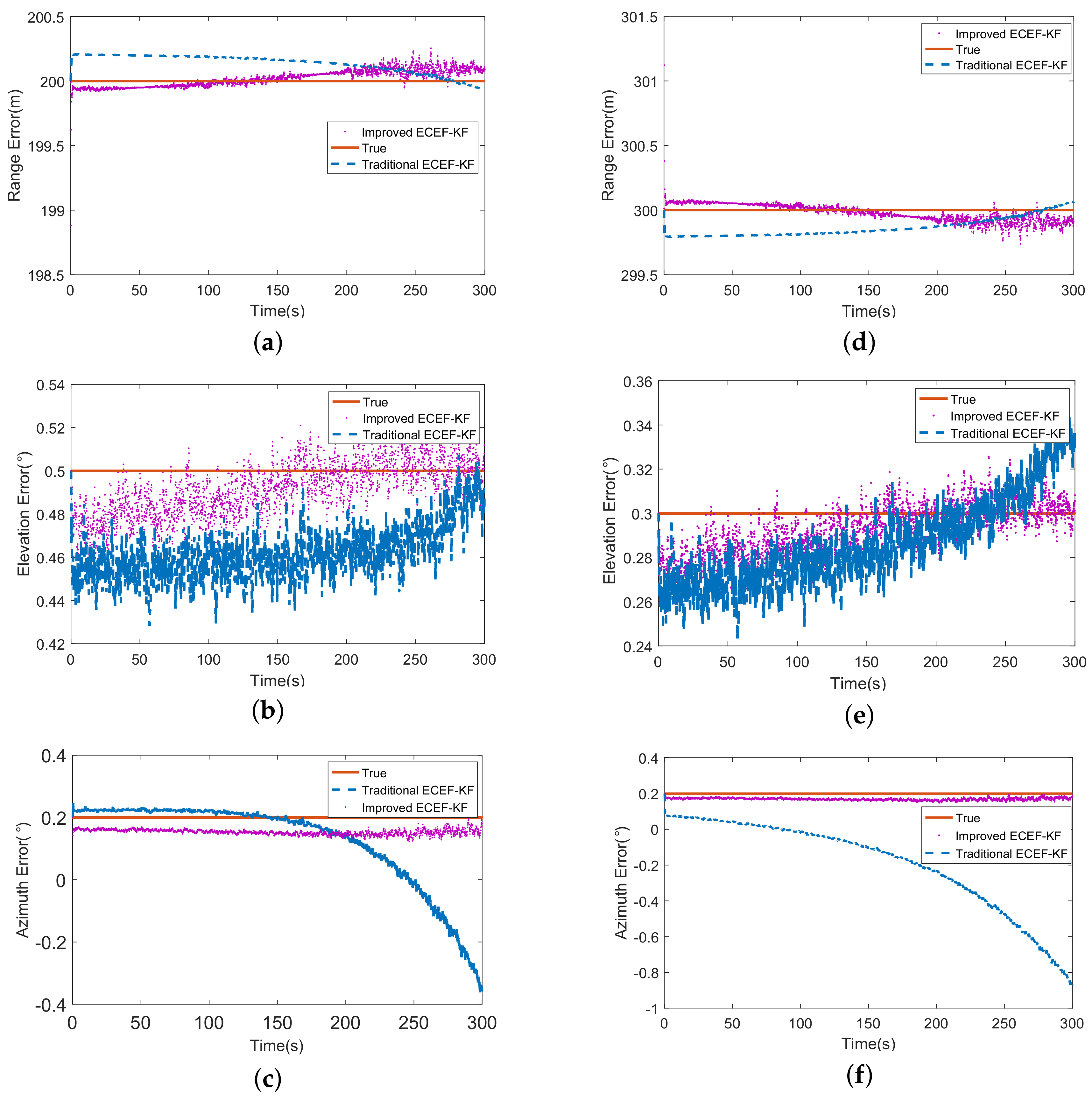
3.3. Improved ECEF-KF Algorithm
4. Target Tracking with Error Compensation
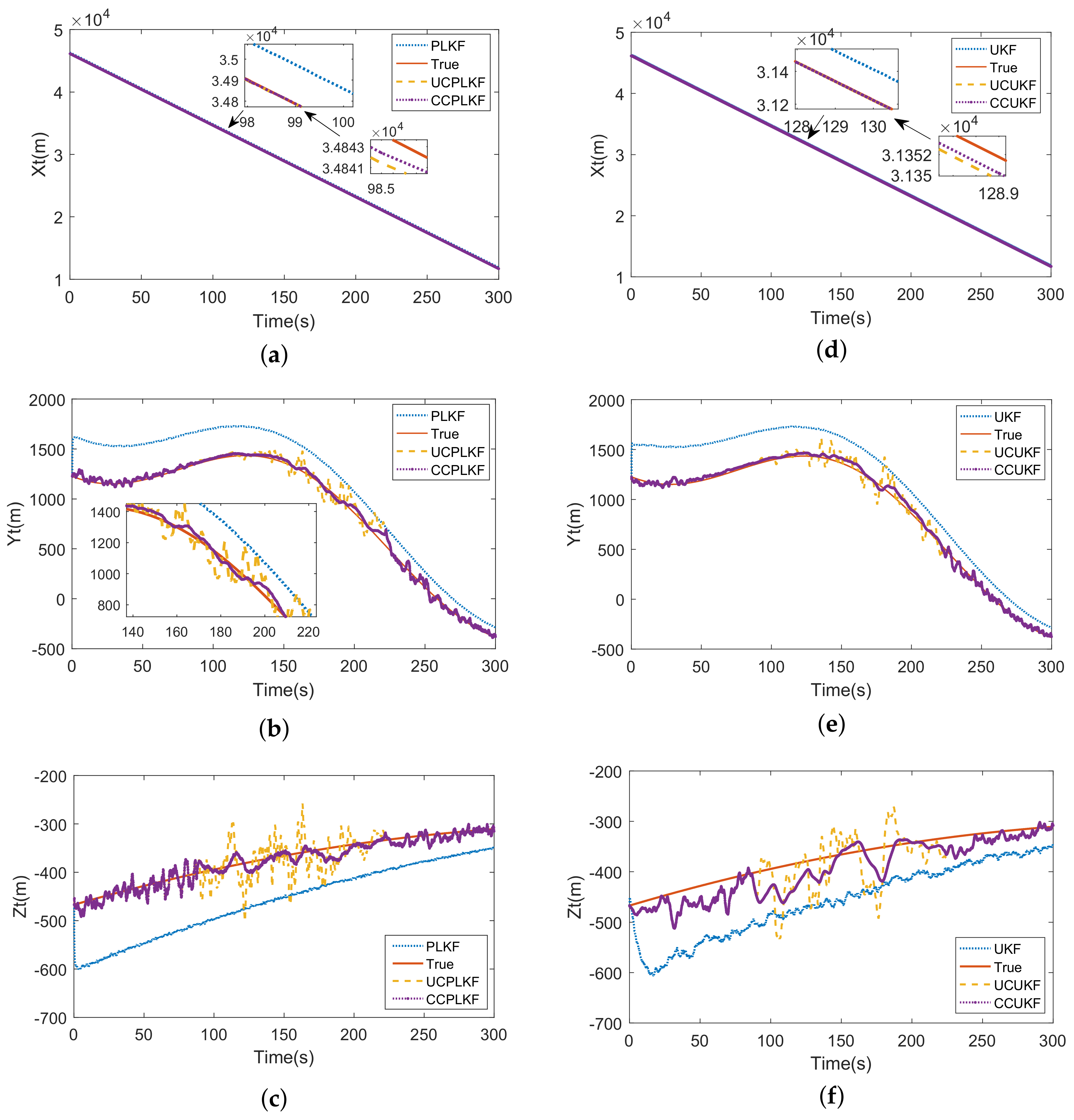
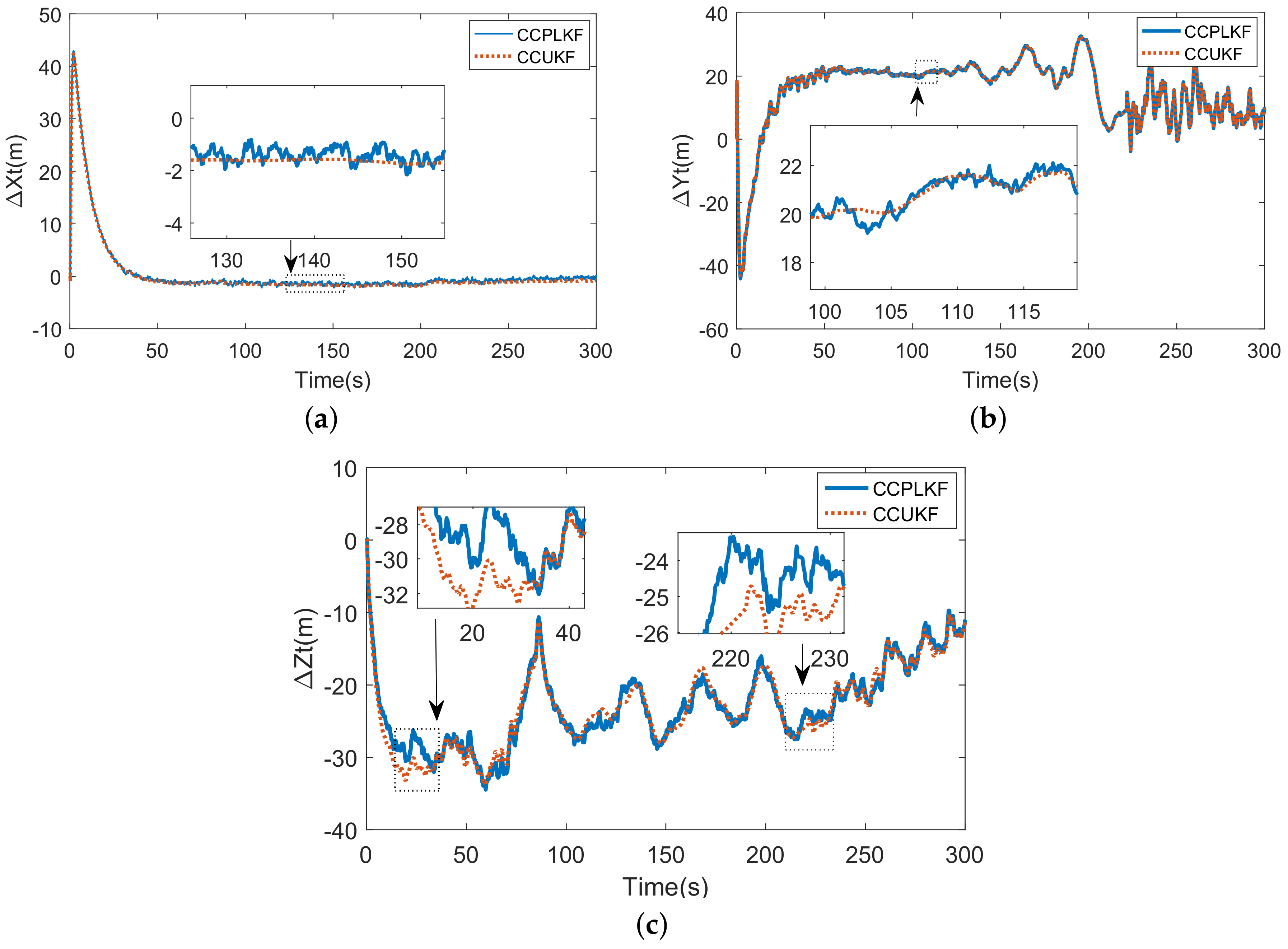
4.1. Compensation PLKF Algorithm
4.2. Conpensation UKF Algorithm
4.3. Compensation Condition and Strategy
5. Simulation
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Li, M.; Jing, Z.; Hu, M.; Dong, P. Exact Joint Estimation of Registration Error and Target States Based on GLMB Filter. In Proceedings of the 20th International Conference on Information Fusion, Xi’an, China, 10–13 July 2017. [Google Scholar]
- Xiu, J.; Dong, K.; He, Y. Systematic error real-time registration based on modified input estimation. Syst. Eng. Electron. 2016, 27, 986–992. [Google Scholar] [CrossRef]
- Zhang, F.; Christian, B.; Alois, K. Multiple Vehicle Cooperative Localization with Spatial Registration Based on a Probability Hypothesis Density Filter. Sensors 2014, 14, 995–1009. [Google Scholar] [CrossRef] [PubMed]
- Song, W. Research progress of spatial registration algorithms for sensor data. Trans. Microsyst. Technol. 2012, 8, 5–8. [Google Scholar]
- He, Y.; Xiu, J.; Guan, X. Radar Network Error Registration Algorithm. Radar Data Processing with Applications; John Wiley & Sons Singapore Pte. Ltd.: Singapore, 2016. [Google Scholar]
- Zheng, Z.; Zhu, Y. New least squares registration algorithm for data fusion. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1410–1416. [Google Scholar] [CrossRef]
- Dong, Y.; He, Y.; Wang, G. A Generalized Least Squares Registration Algorithm with Earth-Centered Earth-Fixed (ECEF) Coordinate System [Radar Sensor Fusion Applications]. In Proceedings of the International Conference on Computational Electromagnetics and ITS Applications, Beijing, China, 1–4 November 2004. [Google Scholar]
- Yang, X.; Wang, Y.; Shan, X. Ill-Condition Controlled Maximum Likelihood Registration for Multiple Sensors. Adv. Mater. Res. 2014, 898, 797–801. [Google Scholar]
- Han, C.; Zhu, H.; Duan, Z. Time and Spatial Registration. In Multi-Source Information Fusion, 2nd ed.; Tsinghua University Press: Beijing, China, 2010; pp. 198–202. [Google Scholar]
- Liu, Y.; Yang, Z.; Han, C. A study on space registration algorithm of sensor attitude bias. Mod. Radar 2009, 31, 29–31. [Google Scholar]
- Helmick, R.E.; Rice, T.R. Removal of alignment errors in an integrated system of two 3-d sensors. IEEE Trans. Aerosp. Electron. Syst. Aes. 1993, 29, 1333–1343. [Google Scholar] [CrossRef]
- Bo, Y.; Chen, Z.; Yin, M.; Wang, T. Improved different dimensional sensors combined space registration algorithm. Math. Prob. Eng. 2015, 2015, 1–9. [Google Scholar] [CrossRef]
- Van Doorn, B.A.; Blom, H.A. Systematic Error Estimation in Multisensor Fusion Systems. In Proceedings of the SPIE—Conference on Signal and Data Processing of Small Targets, Orlando, FL, USA, 22 October 1993; pp. 450–461. [Google Scholar]
- Li, S. Research on the Method of Locating and Tracking Based on Multi-Source Information Fusion Technology. Master’s Degree, Henan University, Kaifeng, China, May 2014. [Google Scholar]
- Doulamis, A. Dynamic tracking re-adjustment: A method for automatic tracking recovery in complex visual environments. Multimed. Tool. Appl. 2010, 50, 49–73. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Bucy, R.S.; Senne, K.D. Digital Synthesis of Non-linear Filters. Autimatica 1971, 7, 287–298. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New Extension of the Kalman Filter to Nonlinear Systems. Int. Soc. Opt. Photonics 1997, 182–193. [Google Scholar] [CrossRef]
- Pathiranage, C.D.; Watanabe, K.; Jayasekara, B.; Izumi, K. Simultaneous Localization and Mapping: A Pseudolinear Kalman Filter (PLKF) Approach. In Proceedings of the International Conference on Information and Automation for Sustainability, Colombo, Sri Lanka, 12–14 December 2008; pp. 61–66. [Google Scholar]
- Li, X.R.; Jikov, V.P. A Survey of Maneuvering Target Tracking-part III Measurement Models. In Proceedings of the Conference on Signal and Date Processing of Small Targets, San Diego, CA, USA, 26 November 2001. [Google Scholar]
- Li, W.; Peng, W.; Peng, L.; Li, Y. Semidefinite programming algorithm with TDOA and FDOA measurements based on WGS-84 earth model. Acta Aeronaut. ET Astronaut. Sin. 2017, 38, 283–290. [Google Scholar]
- Guinot, B.; Feissel, M. Bureau International de l’Heure. Annual Report 1984; Observatoire de Paris: Paris, France, 1985; p. 22. [Google Scholar]
- Crespi, M.; Baiocchi, V.; De Vendictis, L.; Giannone, F. A New Rigorous Model for the Orthorectification of Syncronous and Asyncronous High Resolution Imagery. In Proceedings of the 24th EARSeL Symposium, Dubrovnik, Croatia, 25–27 May 2004; pp. 461–468. [Google Scholar]
- Zhou, Y.; Leung, H.; Blanchette, M. Sensor alignment with Earth-centered Earth-fixed (ECEF) coordinate system. IEEE Trans. Aerosp. Electron. Syst. 2002, 35, 410–418. [Google Scholar] [CrossRef]
- Carlson, G.E.; Bott, M.E. Tilt-Table Alignment for Inertial-Platform Maintenance without a Surveyed Site. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9(3), 406–411. [Google Scholar] [CrossRef]
- Lo, J.; Ma, W.; Yuan, J. Inertial Navigation. In Principle and Application of Integrated Navigation, 1st ed.; NWPU Press: Xi’an, China, 2012; p. 61. [Google Scholar]
- Qin, Y.; Zhang, H.; Wang, S. Discrete Kalman Filter. In Kalman Filter and Integrated Navigation Principle, 2nd ed.; NWPU Press: Xi’an, China, 2012; p. 34. [Google Scholar]
- Xu, Y. The Concept and Some Conclusion of Rotation Matrix. J. Jiangsu Open Univ. 1997, 1997, 81–83. [Google Scholar]
- Qin, Y. Strapdown inertial navigation system. In Inertial Navigation, 1st ed.; Science Press: Beijing, China, 2006; p. 356. [Google Scholar]
- Liu, C. Study on Motion Model and Tracking Algorithm of Radar Maneuvering Target. Ph.D. Thesis, Xidian University, Xi’an, China, April 2014. [Google Scholar]
- Guo, Z.; Zhou, J.; Guo, J.; Cieslak, J.; Chang, J. Coupling characterization-based robust attitude control scheme for hypersonic vehicles. IEEE Trans. Ind. Electron. 2017, 64, 6350–6361. [Google Scholar] [CrossRef]
- Yang, H.; Gao, Y. GPS Satellite Orbit Prediction at User End for Real-Time PPP System. Sensors 2017, 17, 1981. [Google Scholar] [CrossRef] [PubMed]
- Abadi, M.A.H.; Cao, B.Y. Solving First Order Fuzzy Initial Value Problem by Fourth Order Runge-Kutta Method Based on Different Means. Fuzzy Inf. Eng. Decis. 2018. [Google Scholar] [CrossRef]
- Nillius, P.; Sullivan, J.; Carlsson, S. Multi-Target Tracking-Linking Identities Using Bayesian Network Inference. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; pp. 2187–2194. [Google Scholar]
- Andriyenko, A.; Schindler, K.; Roth, S. Discrete-Continuous Optimization for Multi-Target Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 1926–1933. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Platform | Range (m) | Elevation () | Azimuth () |
|---|---|---|---|---|
| Improved | Missile 1 | 0.1878 | 0.0126 | 0.0327 |
| ECEF-KF | Missile 2 | 0.1888 | 0.0057 | 0.0255 |
| Traditional | Missile 1 | 0.2667 | 0.0522 | 0.5557 |
| ECEF-KF | Missile 2 | 0.2688 | 0.0475 | 1.0674 |
| Method | RMSEx (m) | RMSEy (m) | RMSEz (m) | RMSEr (m) |
|---|---|---|---|---|
| PLKF | 191.6083 | 269.8833 | 88.9778 | 342.6377 |
| UCPLKF | 6.3140 | 20.5581 | 24.1859 | 32.4938 |
| CCPLKF | 6.2862 | 18.8728 | 23.5337 | 30.9746 |
| UKF | 191.3337 | 269.8901 | 89.1703 | 342.7357 |
| UCUKF | 6.2568 | 20.5293 | 24.3977 | 32.3645 |
| CCUKF | 6.2366 | 18.8422 | 23.7803 | 30.8145 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, X.; Xie, Y.; Zhou, J. Improved Spatial Registration and Target Tracking Method for Sensors on Multiple Missiles. Sensors 2018, 18, 1723. https://doi.org/10.3390/s18061723
Lu X, Xie Y, Zhou J. Improved Spatial Registration and Target Tracking Method for Sensors on Multiple Missiles. Sensors. 2018; 18(6):1723. https://doi.org/10.3390/s18061723
Chicago/Turabian StyleLu, Xiaodong, Yuting Xie, and Jun Zhou. 2018. "Improved Spatial Registration and Target Tracking Method for Sensors on Multiple Missiles" Sensors 18, no. 6: 1723. https://doi.org/10.3390/s18061723
APA StyleLu, X., Xie, Y., & Zhou, J. (2018). Improved Spatial Registration and Target Tracking Method for Sensors on Multiple Missiles. Sensors, 18(6), 1723. https://doi.org/10.3390/s18061723