HiMeter: Telling You the Height Rather than the Altitude

Abstract
:1. Introduction
- 1.
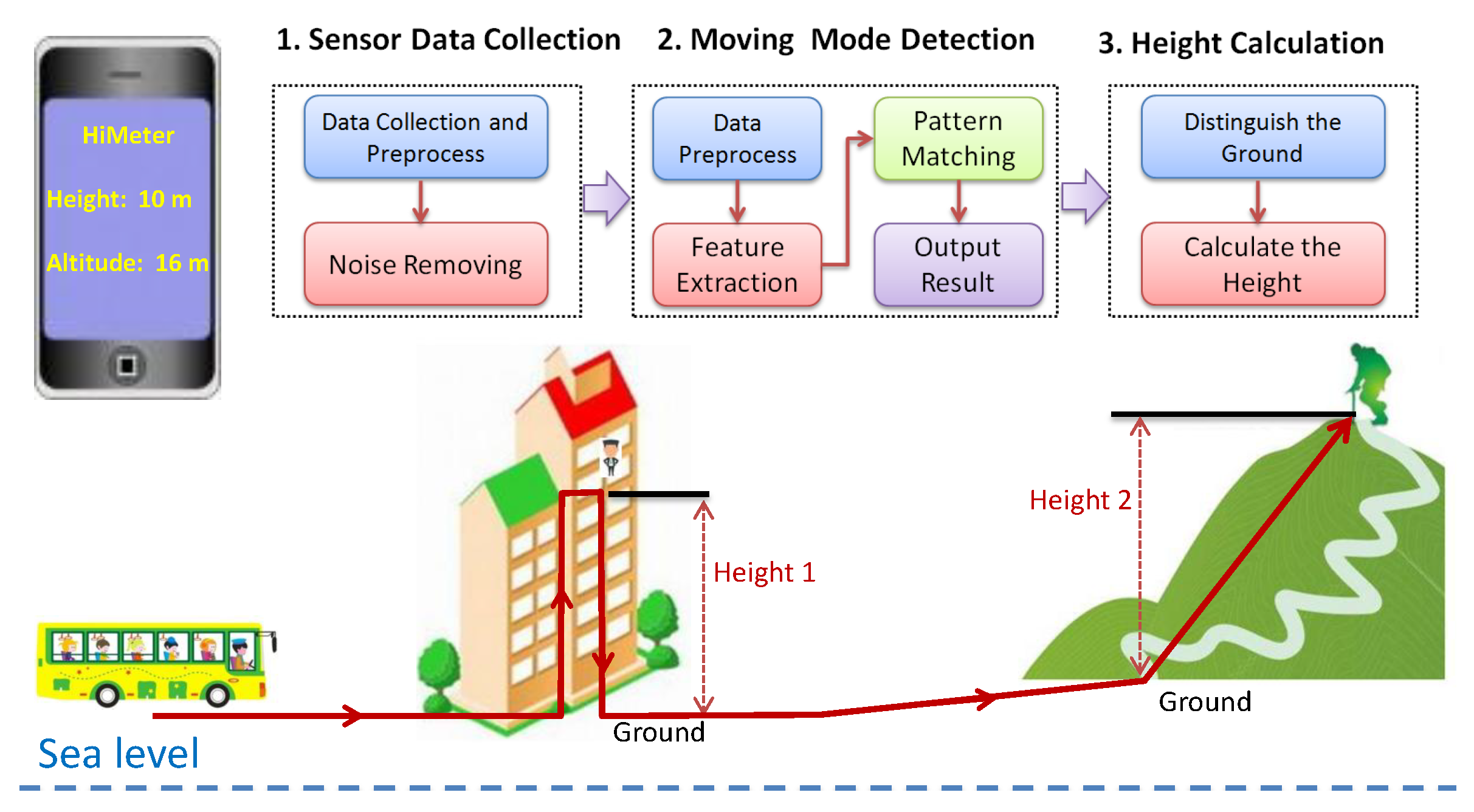
- We propose an effective and accurate approach to calculating the height of the smartphone. HiMeter makes use of the low-power barometer on the smartphone and does not require GPS or any server-side support. To the best of our knowledge, this paper is the first work addressing smartphone height calculation and tracking only using barometer.
- 2.
- We design several novel techniques for noise removal and movement context detection, based on which we can deal with the height calculation problem from a completely new perspective.
- 3.
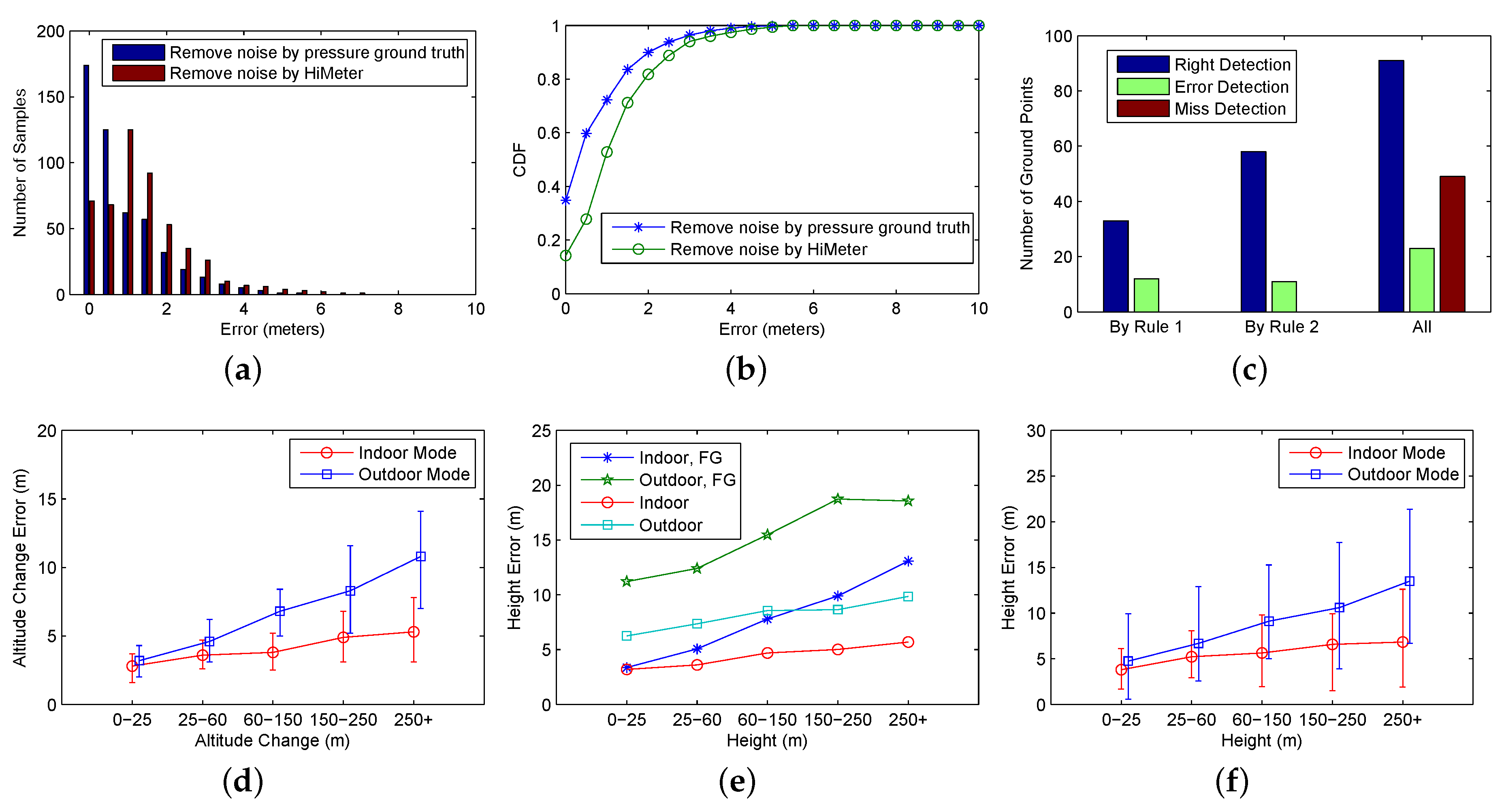
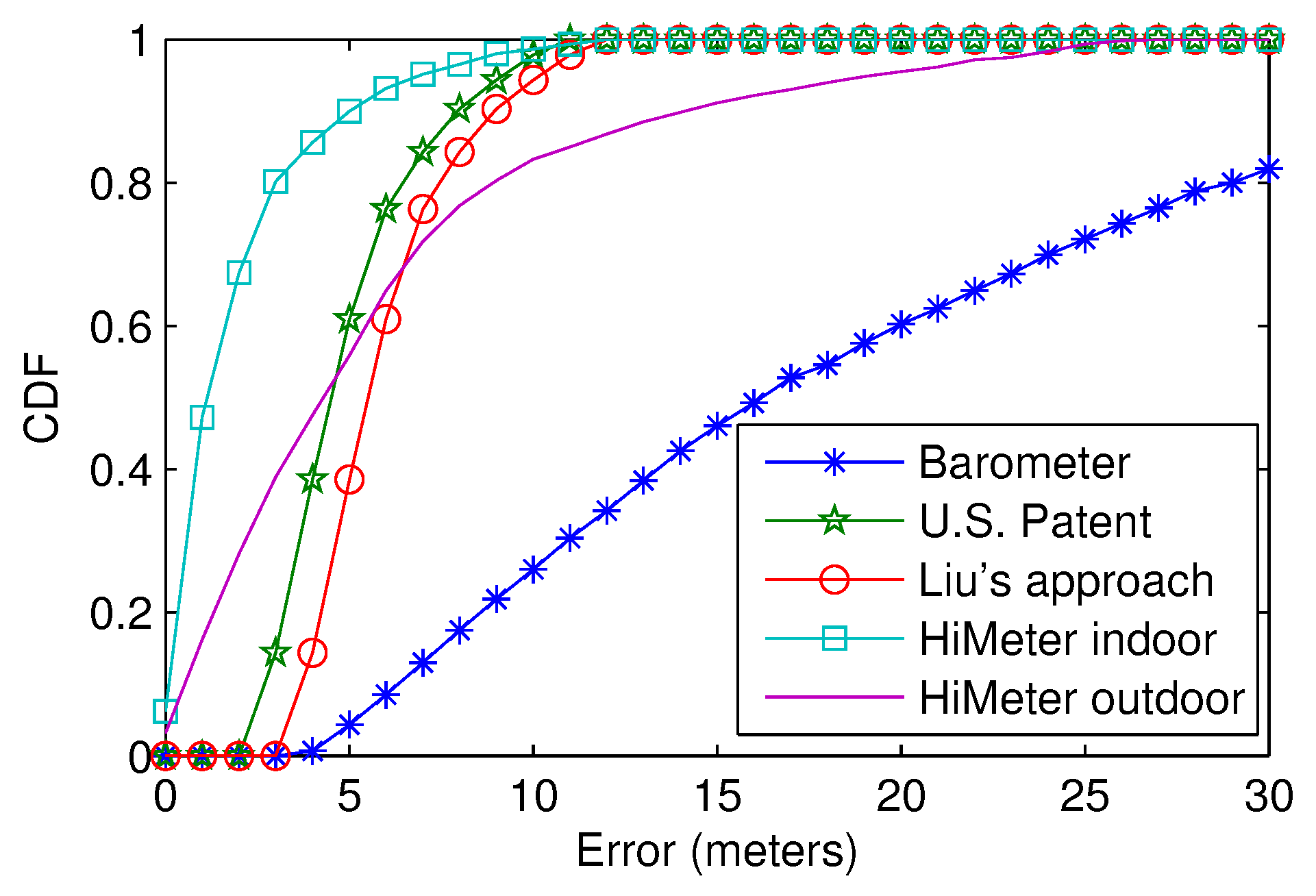
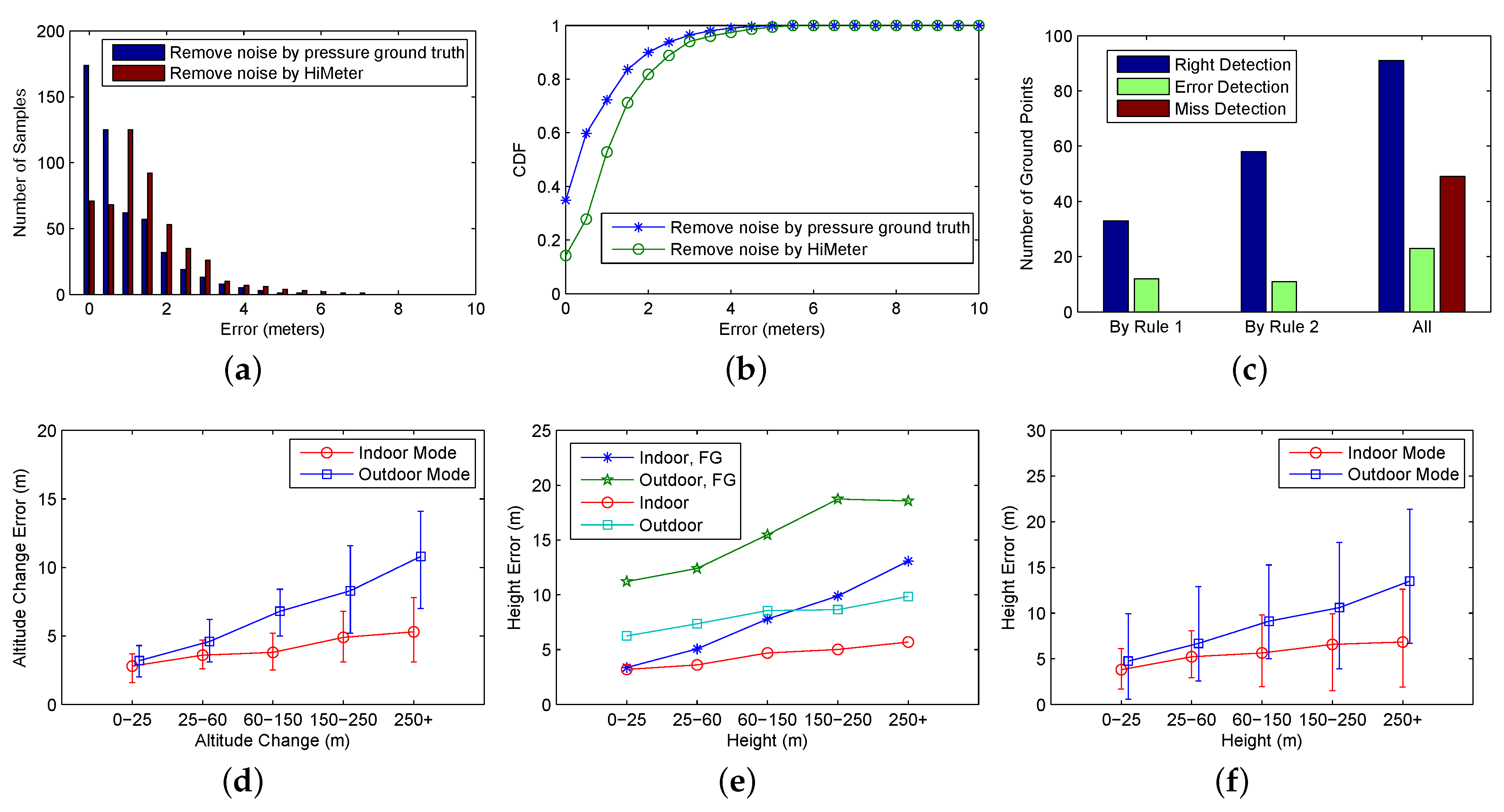
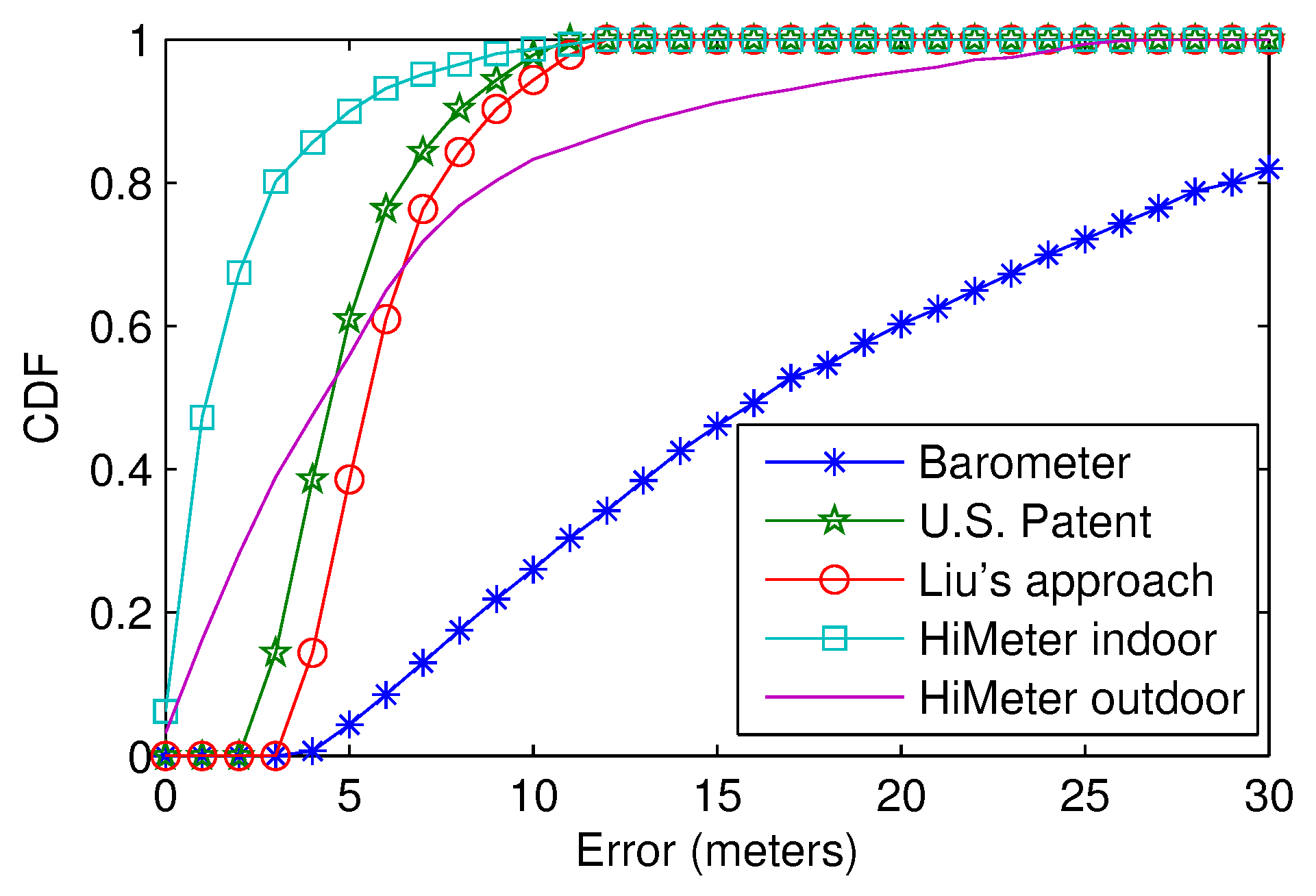
- We carried out a nation-wide online survey to confirm the desirability of HiMeter, and we conducted extensive field studies to analyse the performance of HiMeter. The field study shows that HiMeter can achieve an accuracy of within 5 m in 90% of cases indoors and 10 m in 83% of cases outdoors.
2. Related Work
3. Motivation
4. System Design
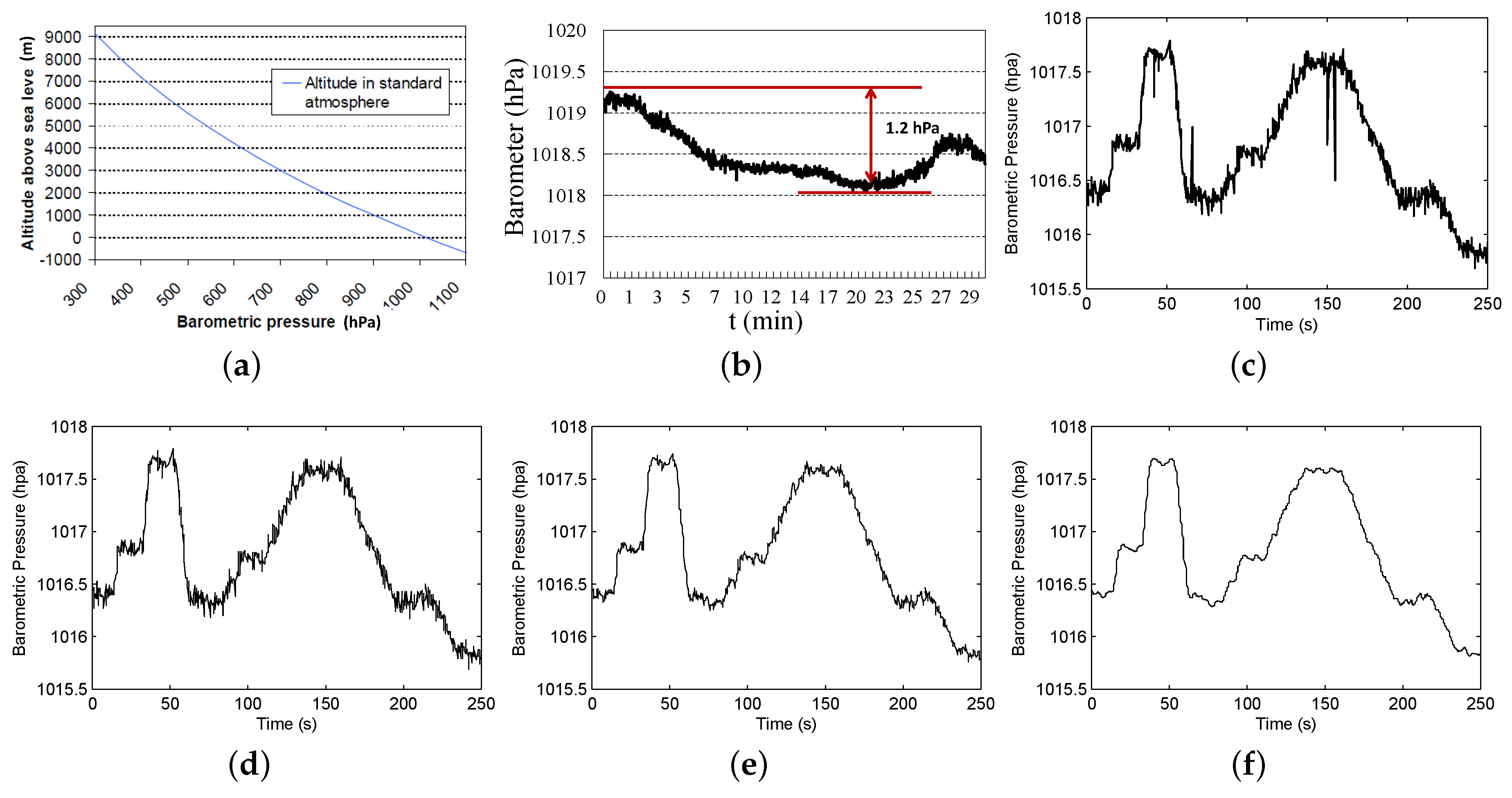
4.1. Barometric Pressure and Barometer Sensor
4.2. Data Preprocessing
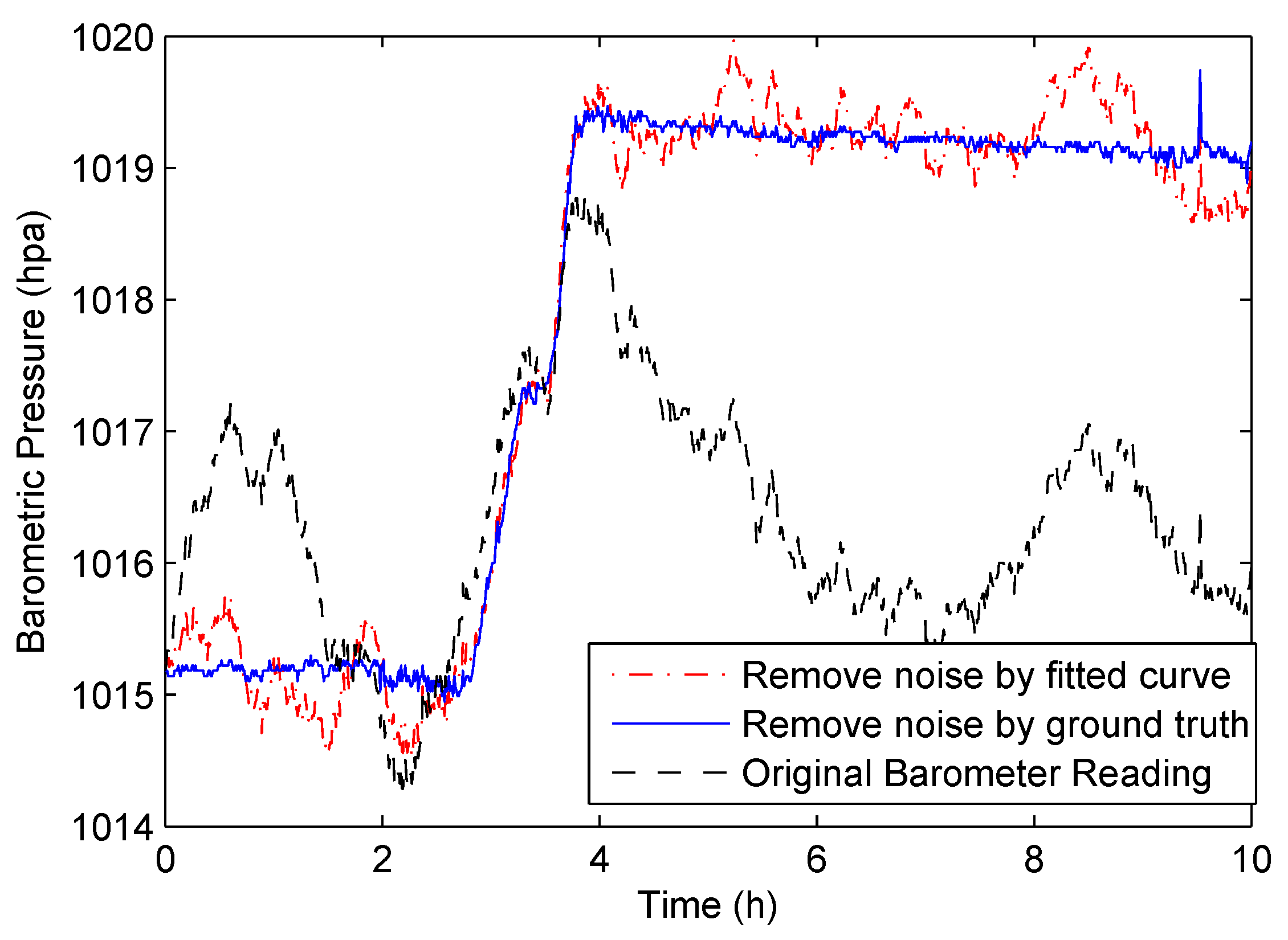
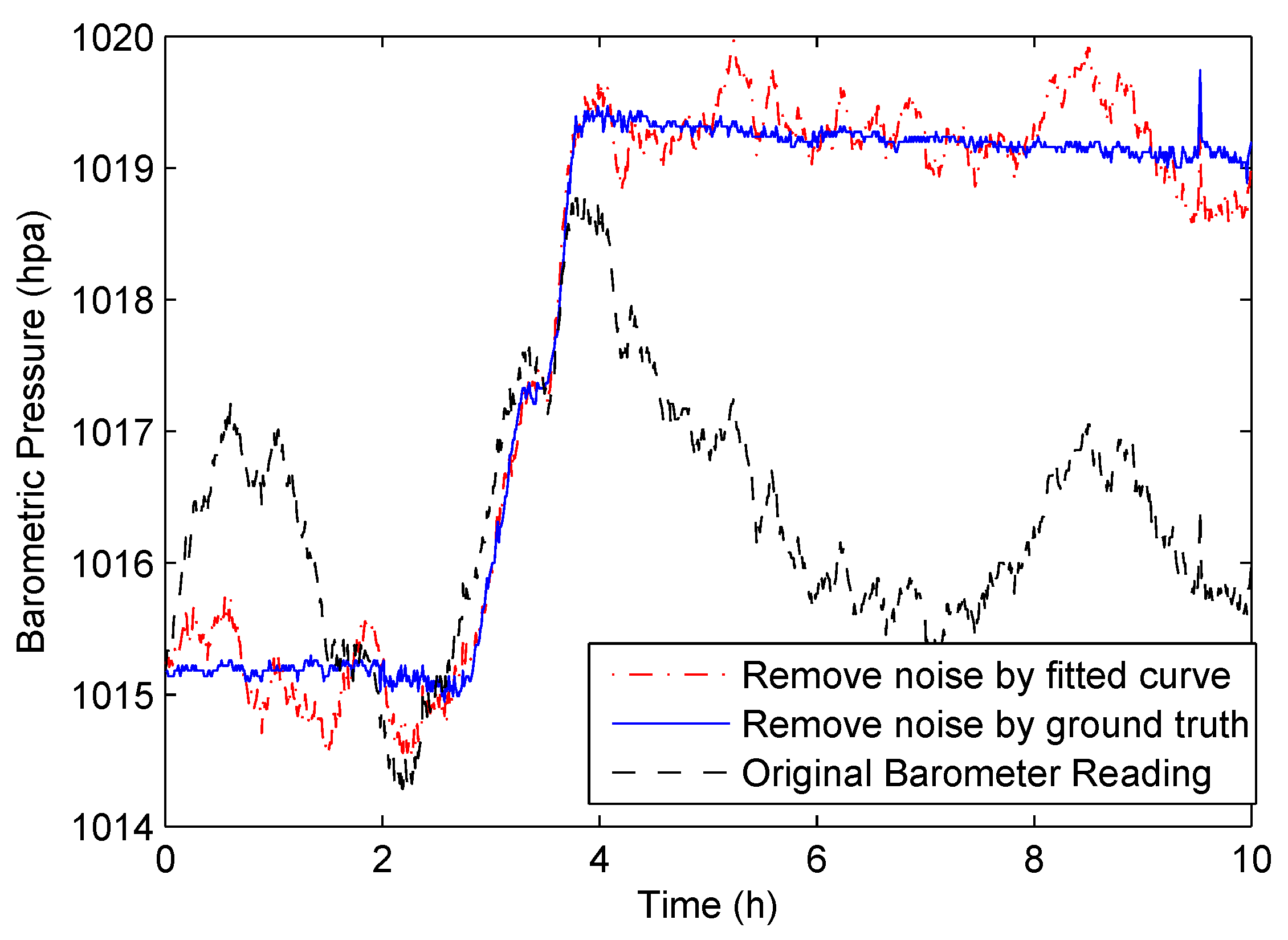
4.3. Filtering Noise Caused by Weather
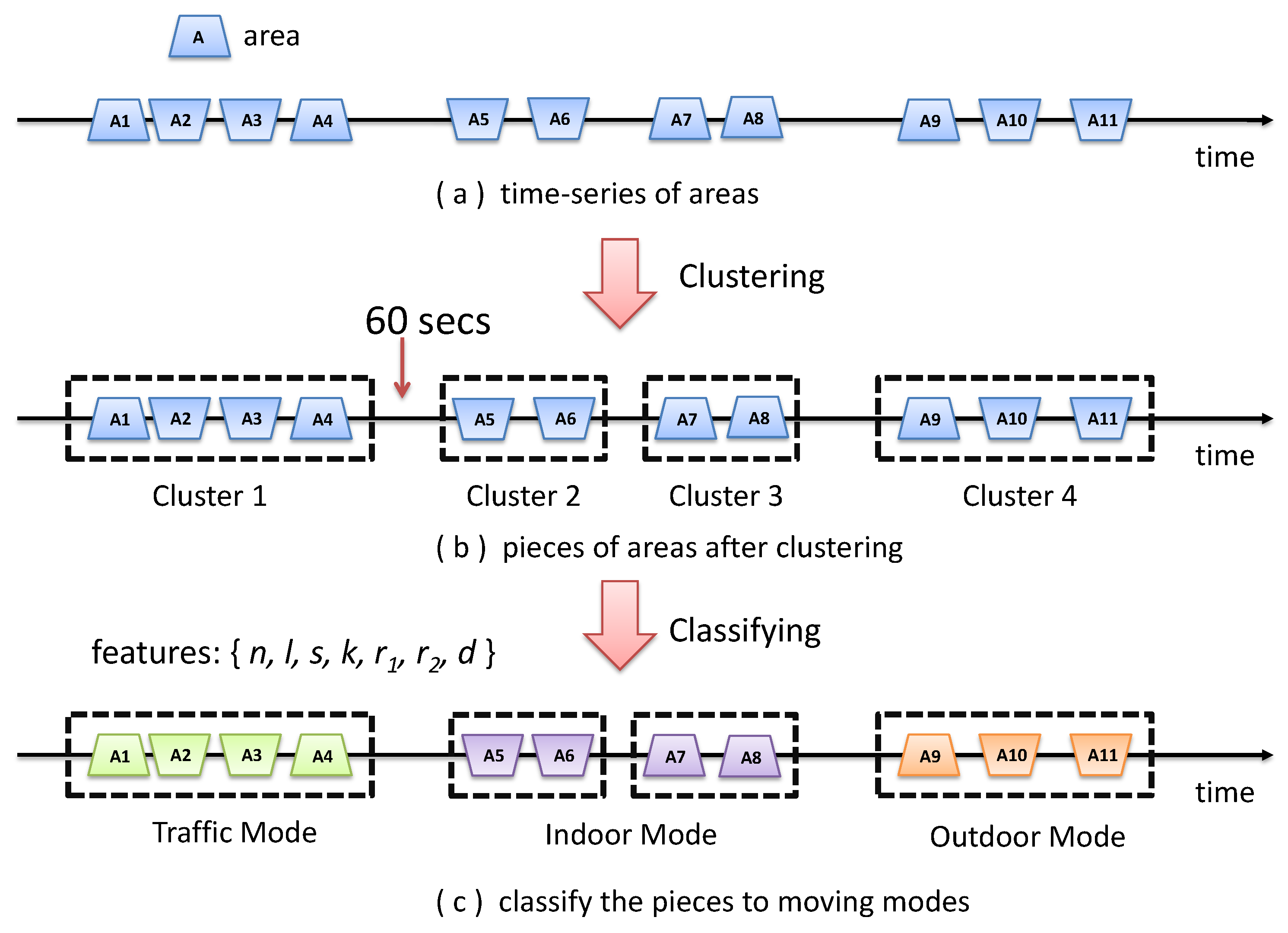
4.4. Moving Mode Detection
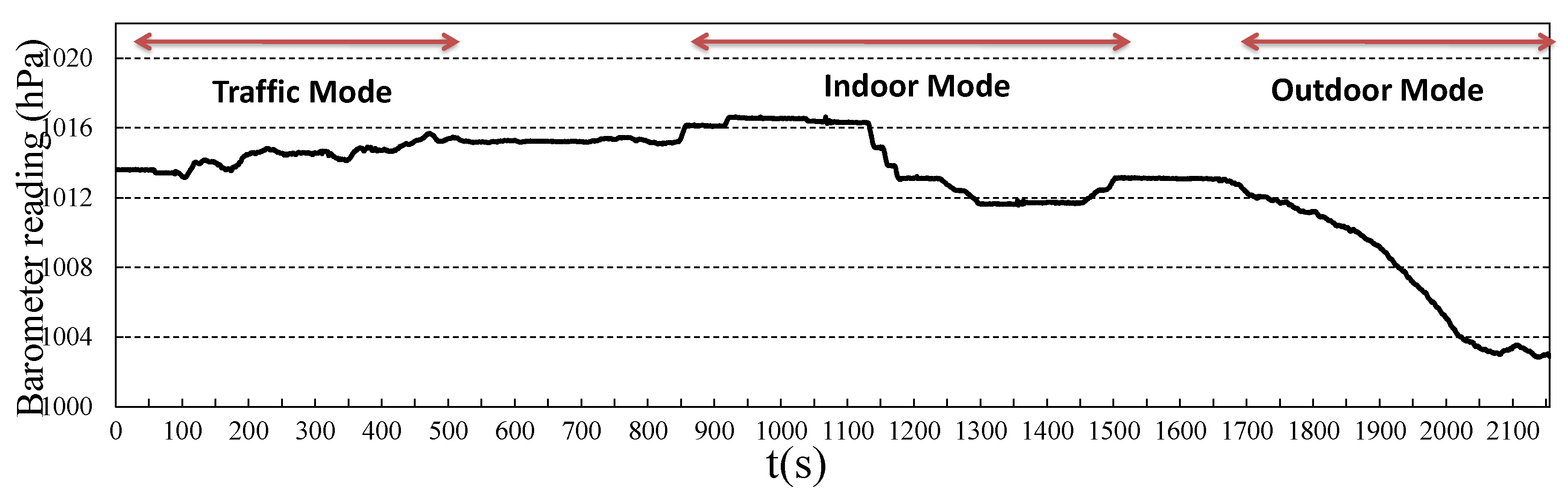
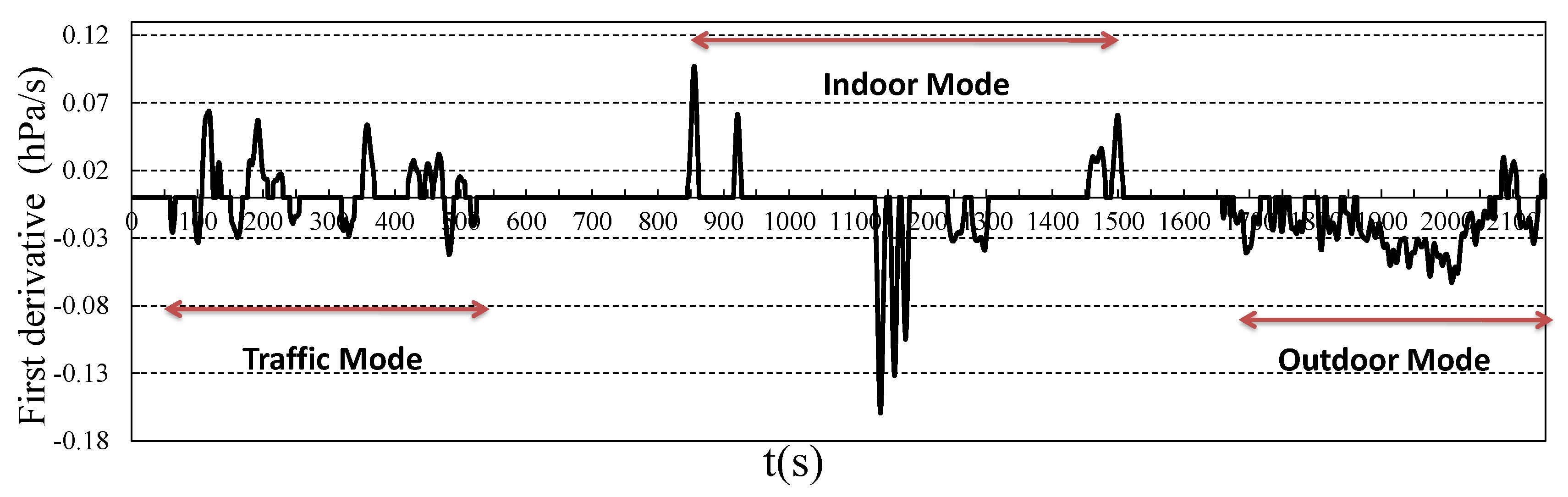
4.4.1. Different Types of Vertical Moving Modes
- Indoor mode, which includes the activities of taking elevators/escalators and climbing short stairs. We name it indoor mode because it often happens indoors and the moving duration is short, meaning the weather noise can be ignored.
- Outdoor mode, which includes climbing on ascending roads outdoors, including moving by foot or bicycle. We name it outdoor mode because it happens outdoors and the moving duration is often long, which means the weather will change in this duration, and the noise cannot be ignored.
- Traffic mode, which includes moving by vehicles/bicycles on non-mountain roads. Car roads are often not flat, which causes the altitude to rise and fall accordingly. As a result, the height calculation becomes more difficult in this mode. In HiMeter, we do not calculate the height when a user is in this mode, yet we treat it as a kind of noise; we detect the mode and filter it. This is applicable based on our online survey, as users do not need to know the height when they are driving or bicycling in non-mountain roads.
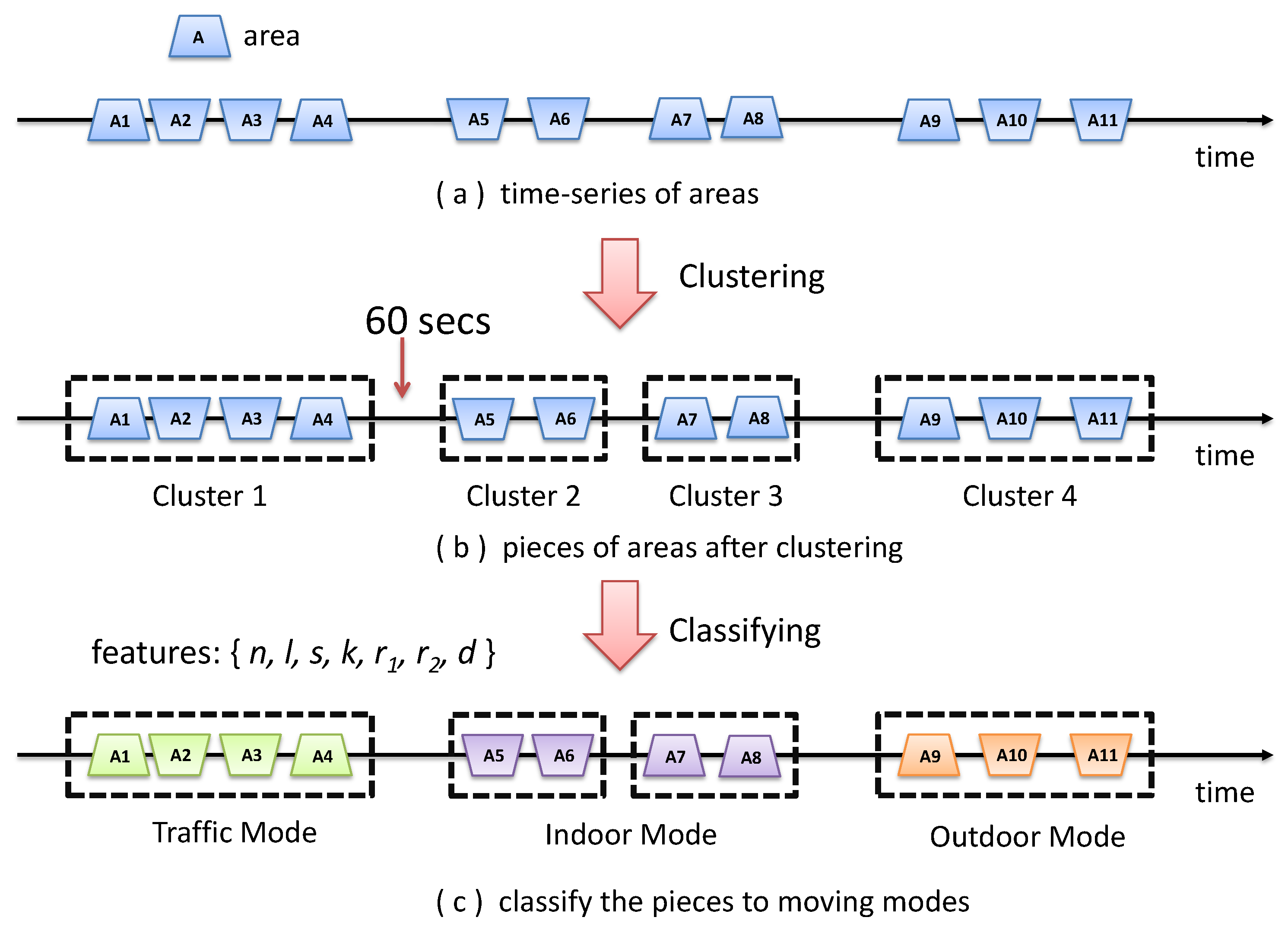
4.4.2. Detect Vertical Moving Modes
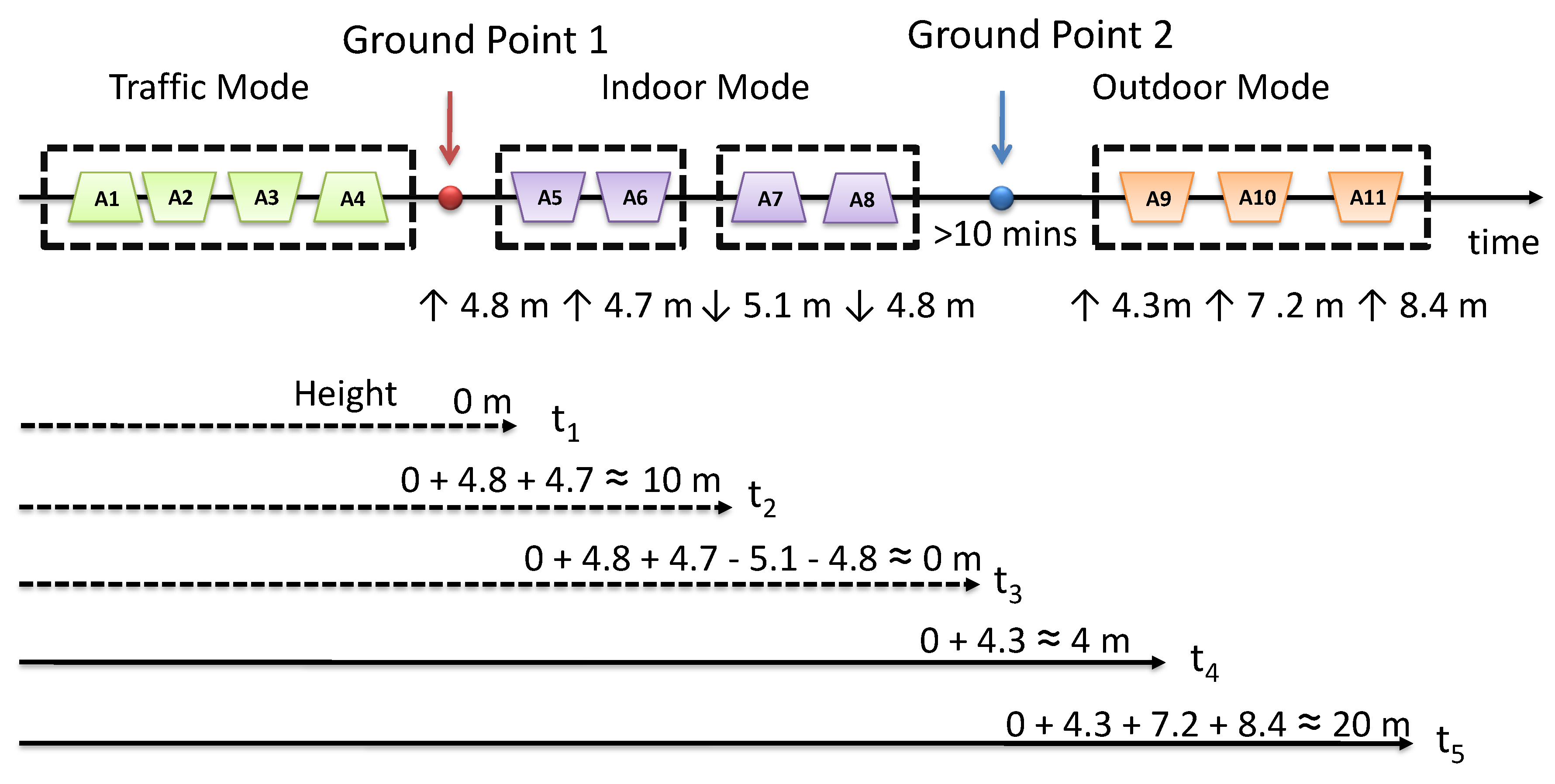
4.5. Distinguish the Ground and Calculate the Height
4.5.1. Distinguish the Ground
- (1)
- : Mode.Previous = “Traffic Mode”;
- (2)
- : Mode.Current = “Outdoor Mode”;
- (3)
- : Mode.Current = “Indoor Mode”;
- (4)
- : The user is on the ground from time to , where = Previous.endTime, = Current.startTime;
- (1)
- : Mode.Previous ends by moving down;
- (2)
- : Mode.Current begins by moving up;
- (3)
- : Mode.Current.startTime—Mode.Previous.endTime > 10 min;
4.5.2. Calculate the Height
5. Evaluation
5.1. Evaluate the Performance of HiMeter
5.2. Evaluate HiMeter with Existing Works
5.3. Evaluation by User Feedback
6. Conclusions and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Google Maps Online. Available online: http://maps.google.com/ (accessed on 1 April 2018).
- Anton, A.M.; Rodriguez, B.R. Runtastic PRO app: An excellent all-rounder for logging fitness. Br. J. Sports Med. 2015, 50. [Google Scholar] [CrossRef]
- Gan, K.E.; Koshy, C.; Nguyen, P.V.; Haw, Y.X. An overview of clinically and healthcare related apps in Google and Apple app stores: Connecting patients, drugs, and clinicians. Sci. Phone Apps Mob. Devices 2016, 2, 8. [Google Scholar] [CrossRef]
- Yang, W.; Xiu, C.; Zhang, J.; Yang, D. A Novel 3D Pedestrian Navigation Method for a Multiple Sensors-Based Foot-Mounted Inertial System. Sensors 2017, 17, 2695. [Google Scholar] [CrossRef] [PubMed]
- Ye, H.; Gu, T.; Tao, X.; Lu, J. Scalable floor localization using barometer on smartphone. Wirel. Commun. Mob. Comput. 2016, 16, 2557–2571. [Google Scholar] [CrossRef]
- Sankaran, K.; Zhu, M.; Guo, X.F.; Ananda, A.L.; Chan, M.C.; Peh, L.S. Using mobile phone barometer for low-power transportation context detection. In Proceedings of the ACM Conference on Embedded Network Sensor Systems, Memphis, TN, USA, 3–6 November 2014; pp. 191–205. [Google Scholar]
- Ye, H.; Dong, K.; Gu, T.; Huang, Z. SMinder: Detect a Left-behind Phone using Sensor-based Context Awareness. Mob. Netw. Appl. 2017, 1–13. [Google Scholar] [CrossRef]
- Liu, G.; Iwai, M.; Tobe, Y.; Matekenya, D.; Hossain, K.M.A.; Ito, M.; Sezaki, K. Beyond horizontal location context: measuring elevation using smartphone’s barometer. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct Publication, Seattle, WA, USA, 13–17 September 2014; pp. 459–468. [Google Scholar]
- Lisle, R.J. Google Earth: A new geological resource. Geol. Today 2006, 22, 29–32. [Google Scholar] [CrossRef]
- GmbH, R.B. BMP280 Barometric Pressure Sensors. Available online: https://www.bosch-sensortec.com/bst/products/all_products/bmp280 (accessed on 1 April 2018).
- Muralidharan, K.; Khan, A.J.; Misra, A.; Balan, R.K.; Agarwal, S. Barometric Phone Sensors–More Hype Than Hope! In Proceedings of the 15th Workshop on Mobile Computing Systems and Applications, Santa Barbara, CA, USA, 26–27 February 2014. [Google Scholar]
- Alberi, M.; Baldoncini, M.; Bottardi, C.; Chiarelli, E.; Fiorentini, G.; Kgc, R.; Realini, E.; Reguzzoni, M.; Rossi, L.; Sampietro, D. Accuracy of Flight Altitude Measured with Low-Cost GNSS, Radar and Barometer Sensors: Implications for Airborne Radiometric Surveys. Sensors 2017, 17, 1889. [Google Scholar] [CrossRef] [PubMed]
- Shen, X.; Chen, Y.; Zhang, J.; Wang, L.; Dai, G.; He, T. BarFi: Barometer-Aided Wi-Fi Floor Localization Using Crowdsourcing. In Proceedings of the IEEE International Conference on Mobile Ad Hoc and Sensor Systems, Dallas, TX, USA, 19–22 October 2015; pp. 416–424. [Google Scholar]
- Li, B.; Harvey, B.; Gallagher, T. Using barometers to determine the height for indoor positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–7. [Google Scholar]
- Xia, H.; Wang, X.; Qiao, Y.; Jian, J.; Chang, Y. Using Multiple Barometers to Detect the Floor Location of Smart Phones with Built-in Barometric Sensors for Indoor Positioning. Sensors 2015, 15, 7857–7877. [Google Scholar] [CrossRef] [PubMed]
- Incel, O.D.; Kose, M.; Ersoy, C. A Review and Taxonomy of Activity Recognition on Mobile Phones. Bionanoscience 2013, 3, 145–171. [Google Scholar] [CrossRef]
- Tadic, S.; Vukajlovic, M.B. Experimental Verification of Inertial Navigation with MEMS for Forensic Investigation of Vehicle Collision. Radioengineering 2016, 25, 187–193. [Google Scholar] [CrossRef]
- Hemminki, S.; Nurmi, P.; Tarkoma, S. Accelerometer-based transportation mode detection on smartphones. In Proceedings of the ACM Conference on Embedded Networked Sensor Systems, Roma, Italy, 11–15 November 2013; pp. 1–14. [Google Scholar]
- Reddy, S.; Mun, M.; Burke, J.; Estrin, D.; Hansen, M.; Srivastava, M. Using mobile phones to determine transportation modes. ACM Trans. Sens. Netw. 2010, 6, 662–701. [Google Scholar] [CrossRef]
- Siirtola, P.; Rning, J. Recognizing Human Activities User-independently on Smartphones Based on Accelerometer Data. Int. J. Interact. Multimed. Artif. Intell. 2012, 1, 38–45. [Google Scholar] [CrossRef]
- Wang, S.; Chen, C.; Ma, J. Accelerometer Based Transportation Mode Recognition on Mobile Phones. In Proceedings of the Asia-Pacific Conference on Wearable Computing Systems, Shenzhen, China, 17–18 April 2010; pp. 44–46. [Google Scholar]
- Zhang, J.; Edwan, E.; Zhou, J.; Chai, W. Performance investigation of barometer aided GPS/MEMS-IMU integration. In Proceedings of the Position Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 598–604. [Google Scholar]
- Vanini, S.; Giordano, S. Adaptive context-agnostic floor transition detection on smart mobile devices. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops, San Diego, CA, USA, 18–22 March 2013; pp. 2–7. [Google Scholar]
- Wu, M.; Pathak, P.H.; Mohapatra, P. Monitoring building door events using barometer sensor in smartphones. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015; pp. 319–323. [Google Scholar]
- Moji Weather Company. MOJI Weather Service. Available online: http://www.moji.com/tob/ (accessed on 1 April 2018).
- Activity Recognition API | Google Developers. Available online: https://developers.google.cn/location-context/activity-recognition/ (accessed on 1 April 2018).
- Guha, S.; Rastogi, R.; Shim, K. CURE: An efficient clustering algorithm for large databases. In Proceedings of the 1998 ACM SIGMOD International Conference on Management of Data, Seattle, WA, USA, 1–4 June 1998; Volume 27, pp. 73–84. [Google Scholar]
- Lee, T.J.; Kim, J.H.; Lee, S.; Lee, H.J.; Lee, J.H.; Cho, Y.; Park, S.; Shin, B.J.; Kim, C. Moble Terminal Capable of Measuring Altitude and Altitude Measurement Method Using the Same. U.S. Patent 20140012529A1, 9 January 2014. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | BMP280 | BMP180/182 | LPS331AP |
|---|---|---|---|
| Absolute accuracy | ±1 hPa (±8.5 m) | −4.0 ... +2.0 hPa (−33 ... +17 m) | −3.2 ... +2.6 hPa (−27 ... +22 m) |
| Relative accuracy | ±0.12 hPa (±1 m) | ±0.12 hPa (±1 m) | ±0.2 hPa (±1.7 m) |
| Noise | 0.013 hPa (0.11 m) | 0.06 hPa (0.5 m) | 0.06 hPa (0.5 m) |
| Used in smartphone | iPhone 6/7, Galaxy S6/S7, Xiaomi 5 | Galaxy Note 2/3, Xiaomi M2, Sony Ericsson Active, Nexus 3/4 | Galaxy S3, S4 |
| Approach | Decision Trees | Naive Bayes | SVM | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Indoor Mode | Outdoor Mode | Traffic Mode | Indoor Mode | Outdoor Mode | Traffic Mode | Indoor Mode | Outdoor Mode | Traffic Mode | |
| Indoor Mode | 91.3% | 5.2% | 7.5% | 82.5% | 9.5% | 4% | 84.2% | 6.5% | 9.3% |
| Outdoor Mode | 3.5% | 88.6% | 6.9% | 2.1% | 88.7% | 9.2% | 3.1% | 89.4% | 7.5% |
| Traffic Mode | 2.8% | 7.1% | 90.1% | 5.6% | 8.3% | 86.1% | 7.5% | 10.9% | 81.6% |
| Barometer | U.S. Patent | Liu’s Approach | HiMeter | |
|---|---|---|---|---|
| Calibrate Barometer | ⬜ | ⬛ | ⬛ | ⬜ |
| Reference Point | ⬜ | ⬛ | ⬛ | ⬜ |
| Manual Assistant | ⬜ | ⬛ | ⬜ | ⬜ |
| Ground Altitude | ⬛ | ⬛ | ⬛ | ⬜ |
| History Data | ⬜ | ⬜ | ⬜ | ⬛ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, H.; Dong, K.; Gu, T. HiMeter: Telling You the Height Rather than the Altitude. Sensors 2018, 18, 1712. https://doi.org/10.3390/s18061712
Ye H, Dong K, Gu T. HiMeter: Telling You the Height Rather than the Altitude. Sensors. 2018; 18(6):1712. https://doi.org/10.3390/s18061712
Chicago/Turabian StyleYe, Haibo, Kai Dong, and Tao Gu. 2018. "HiMeter: Telling You the Height Rather than the Altitude" Sensors 18, no. 6: 1712. https://doi.org/10.3390/s18061712
APA StyleYe, H., Dong, K., & Gu, T. (2018). HiMeter: Telling You the Height Rather than the Altitude. Sensors, 18(6), 1712. https://doi.org/10.3390/s18061712