Self-Sensing of Position-Related Loads in Continuous Carbon Fibers-Embedded 3D-Printed Polymer Structures Using Electrical Resistance Measurement




Abstract
1. Introduction
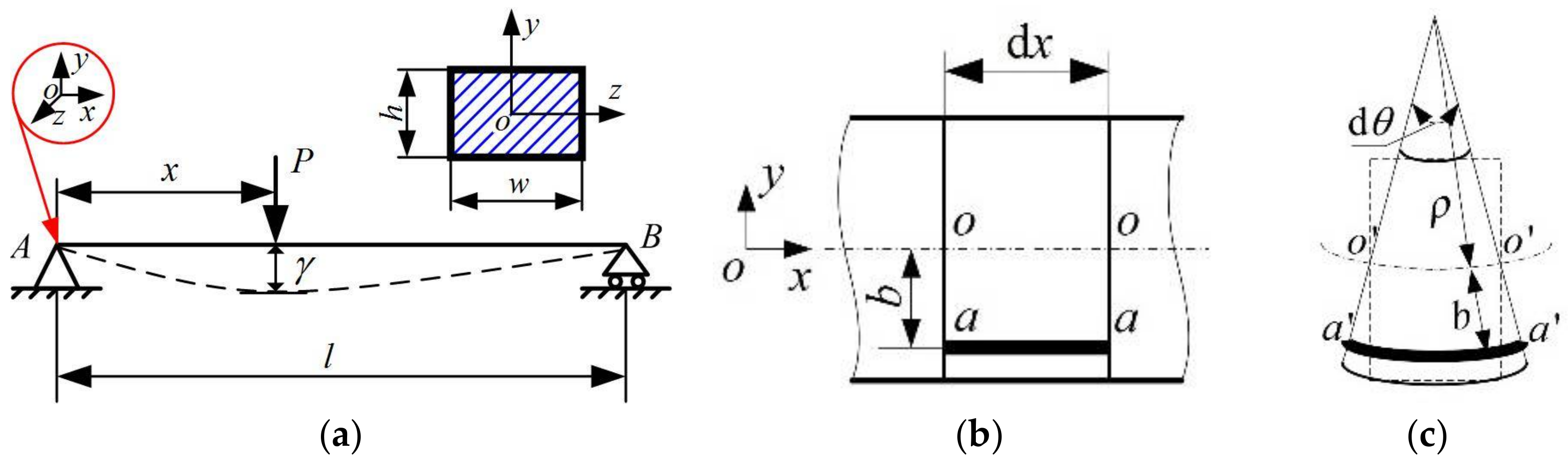
2. Theoretical Derivation and Methods
3. Materials and Experiments
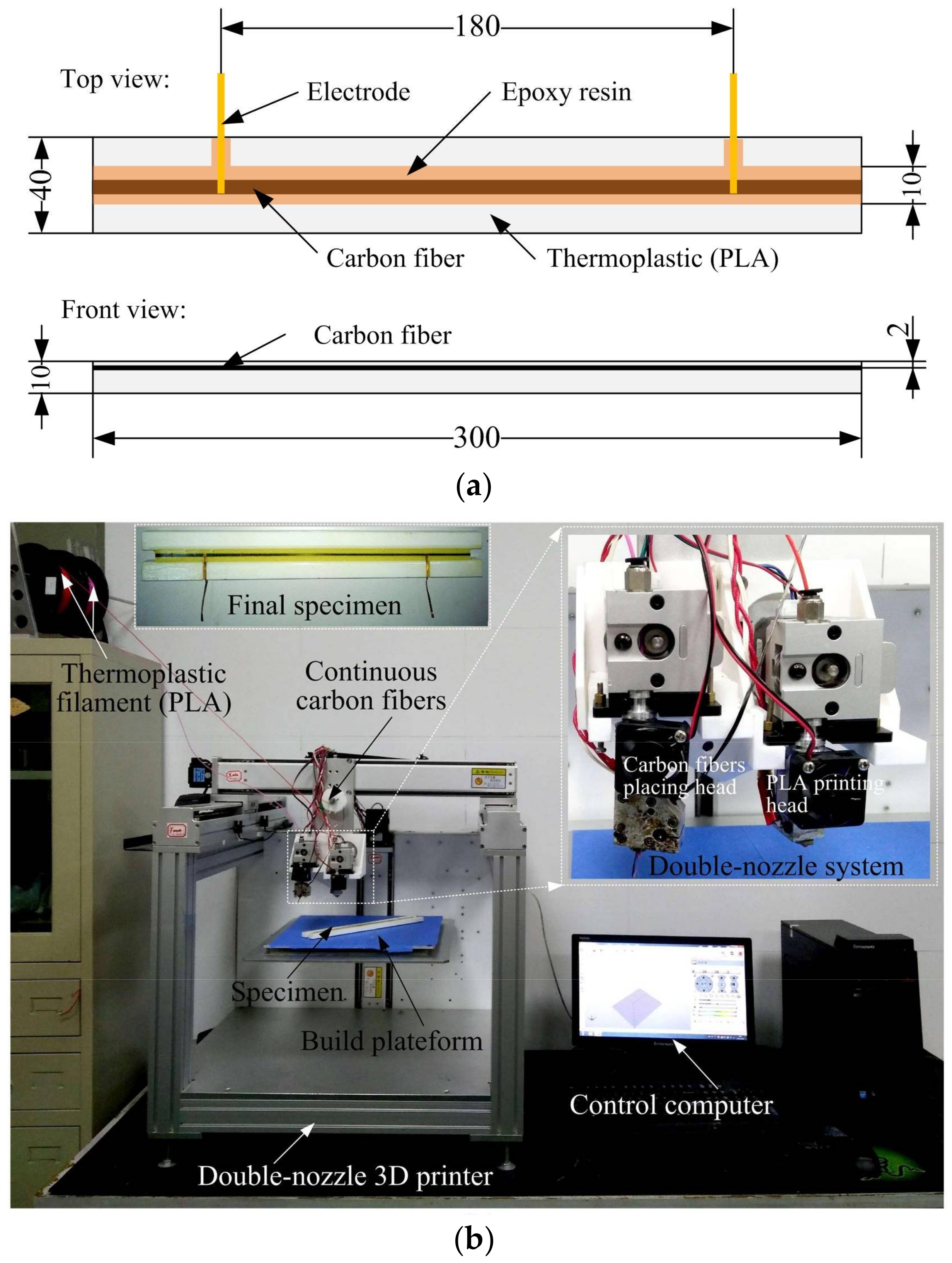
3.1. Specimen Fabrication
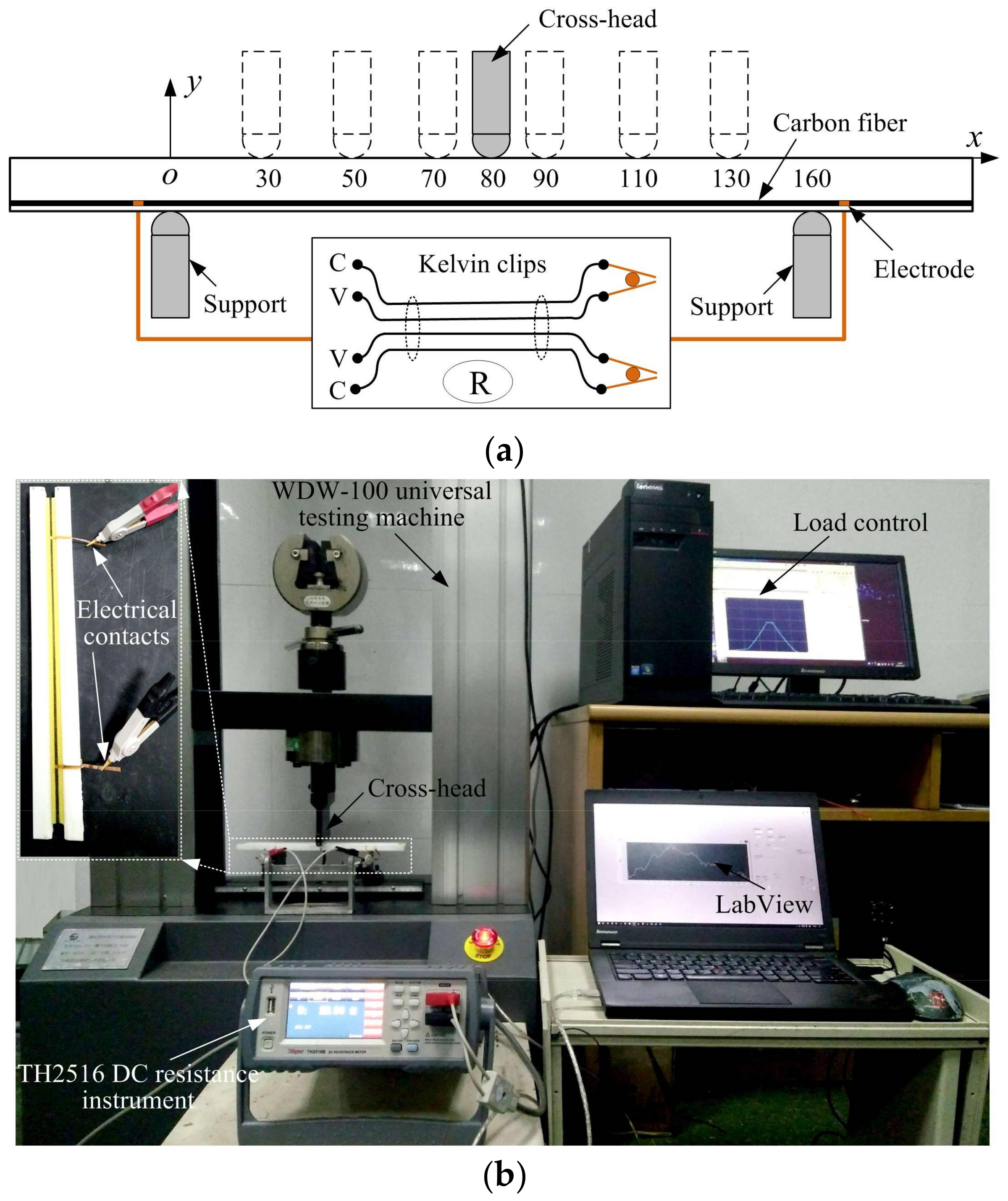
3.2. Testing
4. Results and Discussion
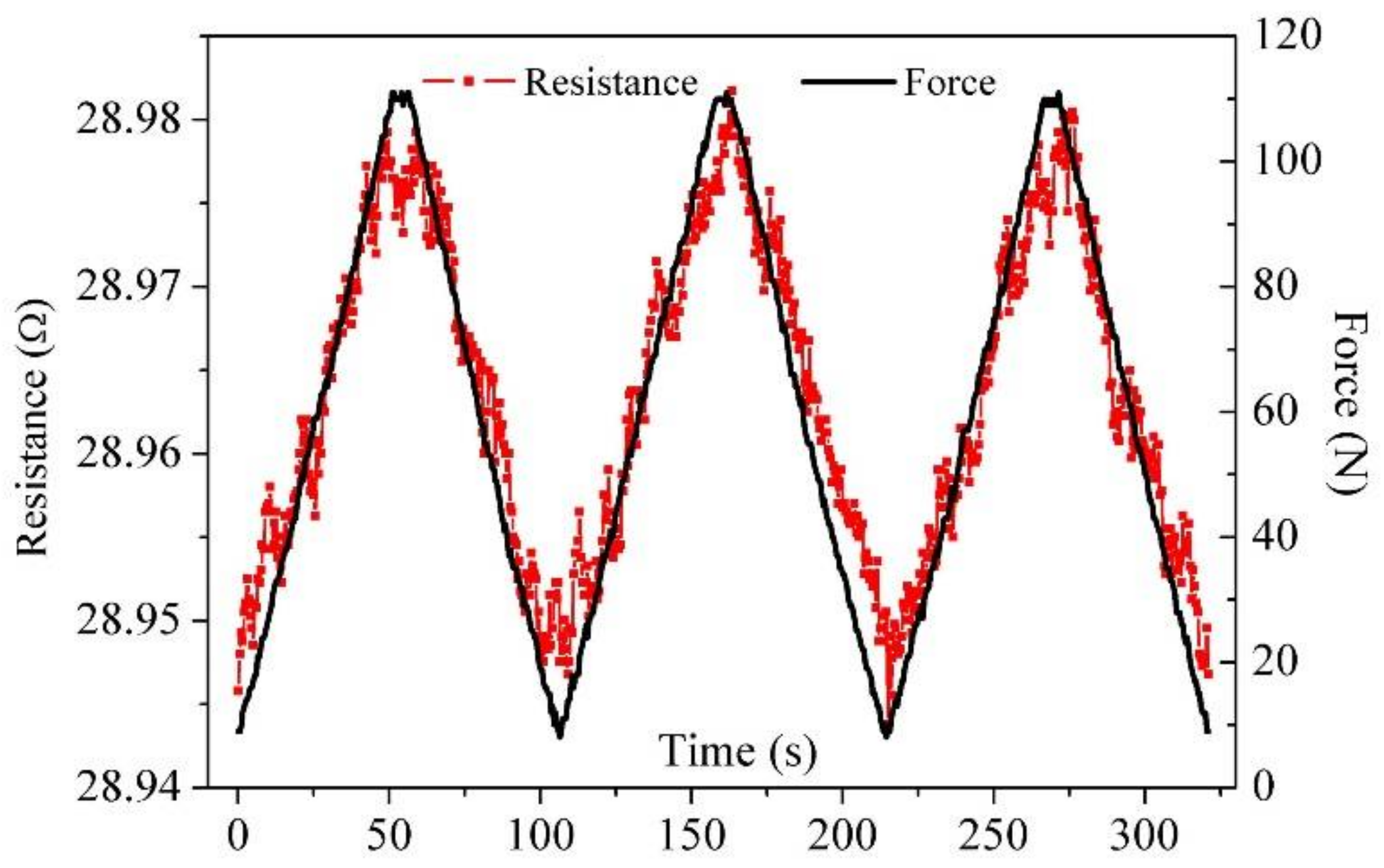
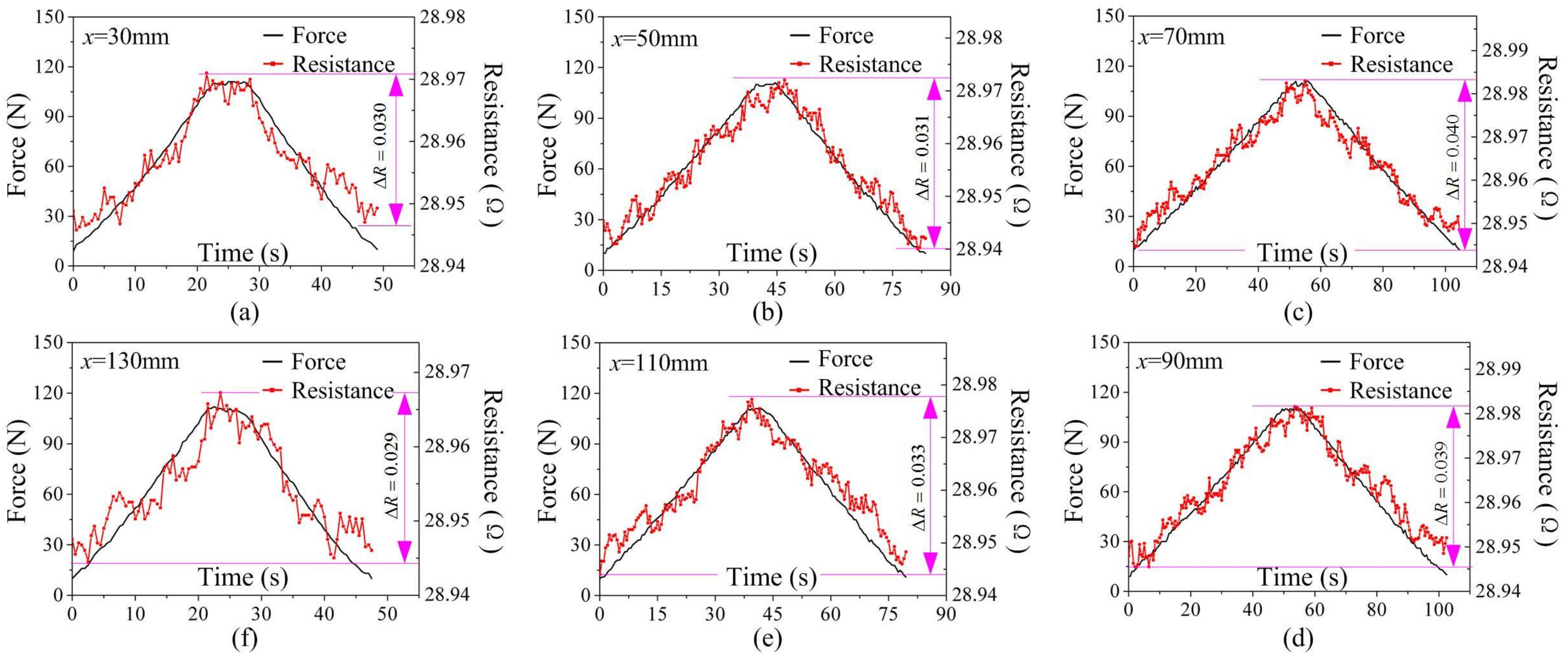
4.1. Response to External Load at Different Loading Positions
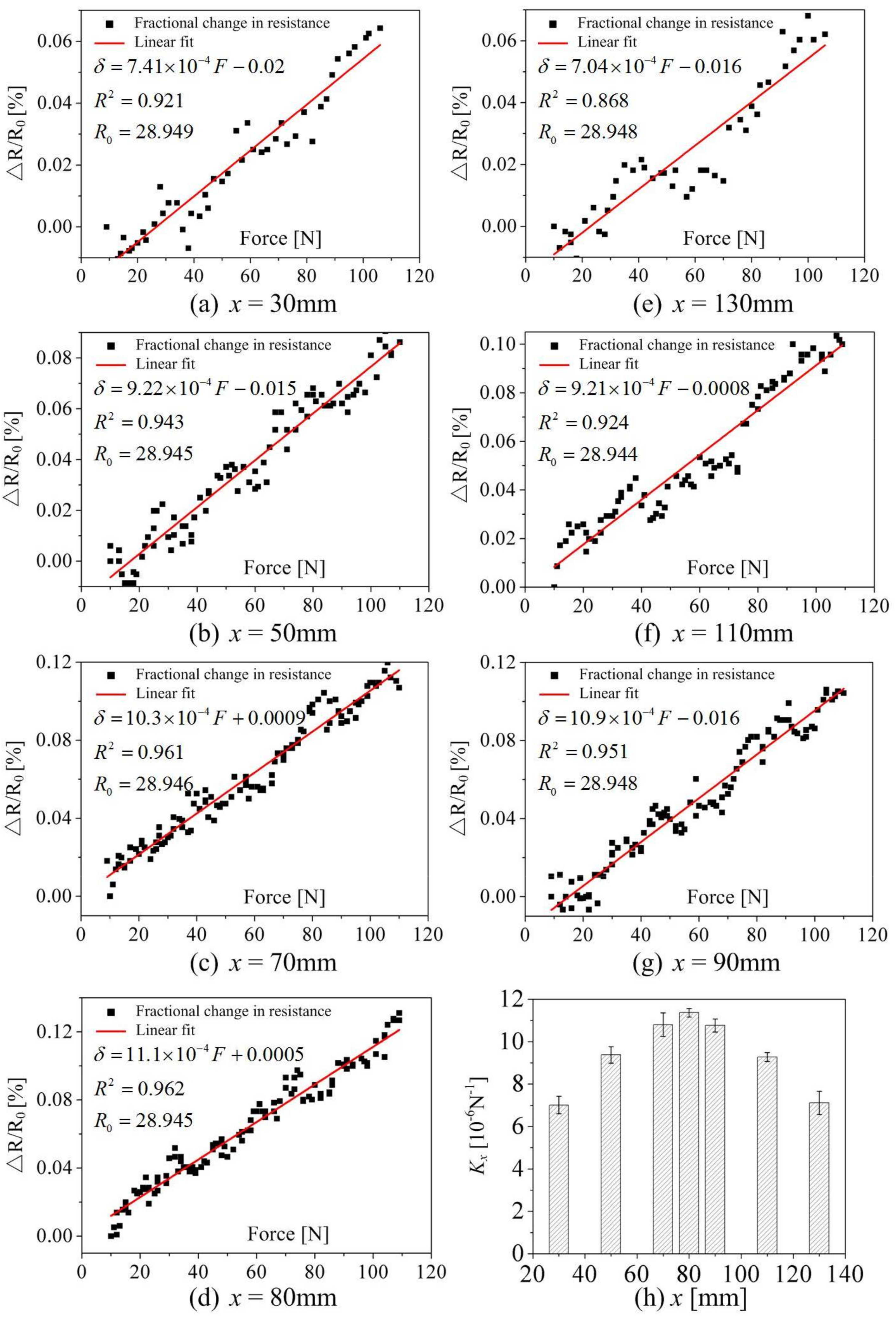
4.2. Determination of the Sensitivity Coefficient Kx Based on Experimental Results
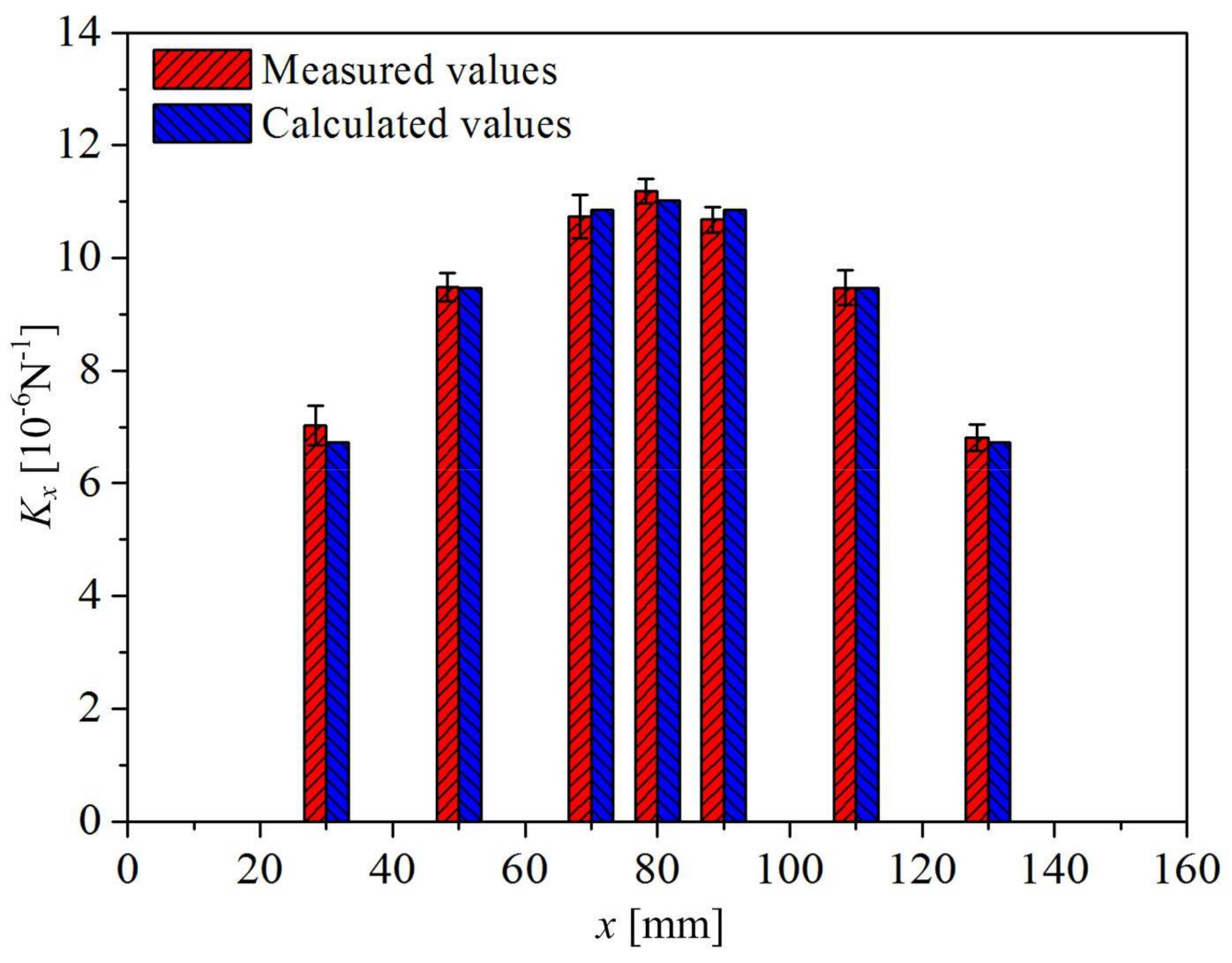
4.3. Comparison of Kx between Measured and Calculated Values
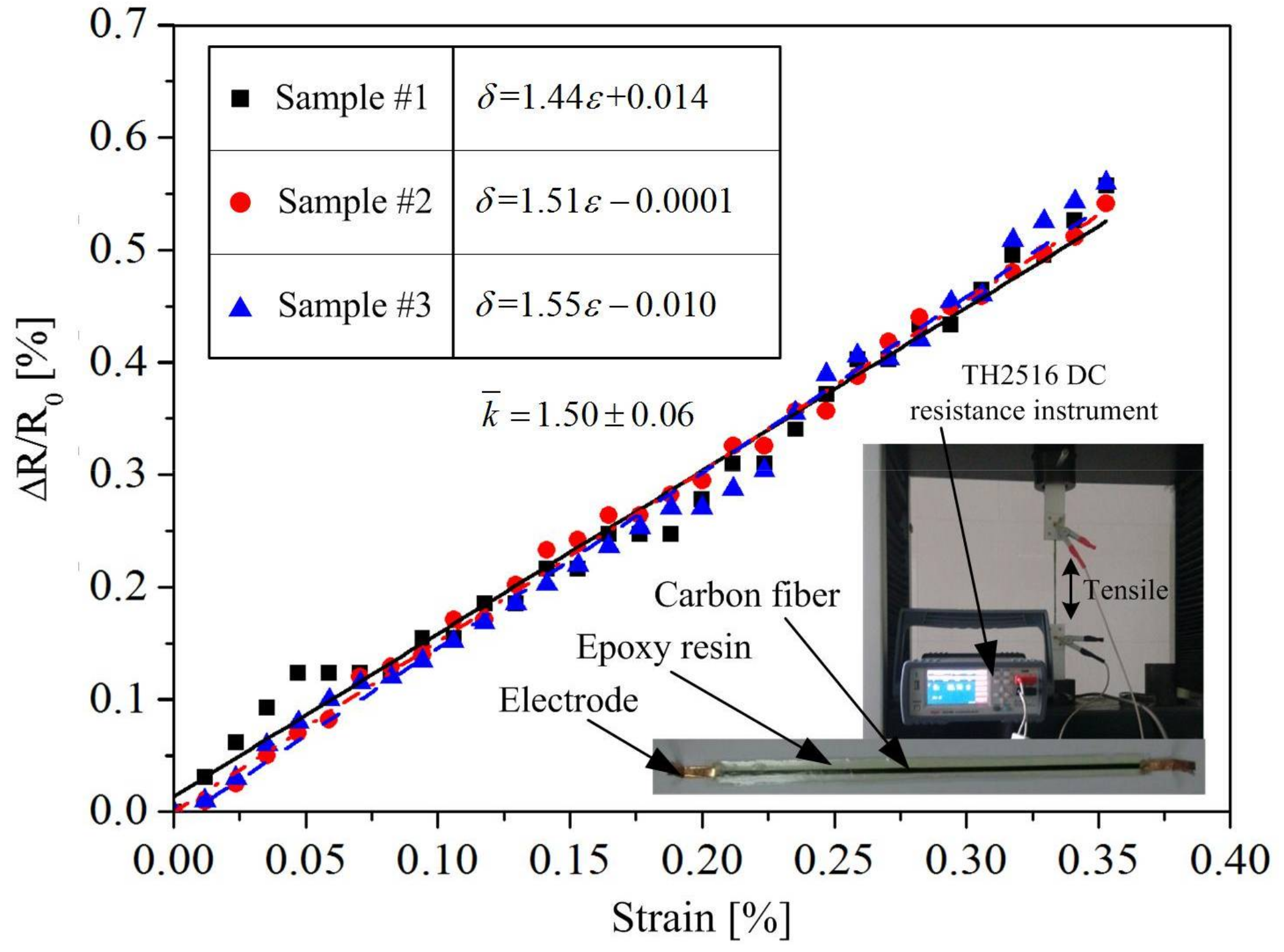
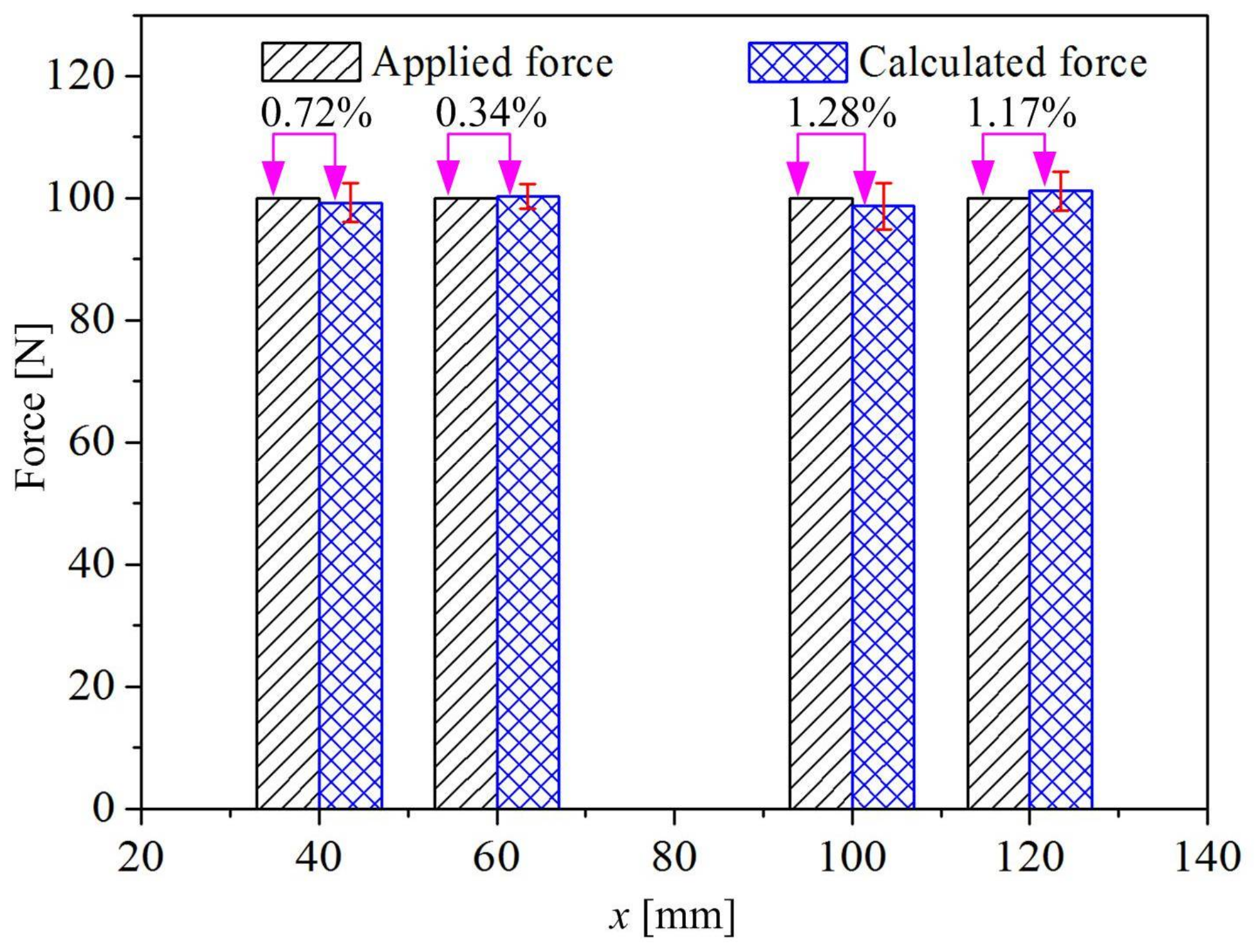
4.4. Verification
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kim, H.-S.; Yoo, S.-H.; Chang, S.-H. In situ monitoring of the strain evolution and curing reaction of composite laminates to reduce the thermal residual stress using FBG sensor and dielectrometry. Compos. Part B Eng. 2013, 44, 446–452. [Google Scholar] [CrossRef]
- Yao, X.; Luan, C.; Fu, J. Transmission and measurement characteristics evaluation of surface acoustic wave sensor on rotating spindle in machine tools. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef]
- Habib, F.; Martinez, M.; Artemev, A.; Brothers, M. Structural health monitoring of bonded composite repairs—A critical comparison between ultrasonic Lamb wave approach and surface mounted crack sensor approach. Compos. Part B Eng. 2013, 47, 26–34. [Google Scholar] [CrossRef]
- Ramirez, M.; Chung, D. Electromechanical, self-sensing and viscoelastic behavior of carbon fiber tows. Carbon 2016, 110, 8–16. [Google Scholar] [CrossRef]
- Chung, D. Self-monitoring structural materials. Mater. Sci. Eng. R Rep. 1998, 22, 57–78. [Google Scholar] [CrossRef]
- Elimat, Z.; Hussain, W.; Zihlif, A. PAN-based carbon fibers/PMMA composites: Thermal, dielectric, and DC electrical properties. J. Mater. Sci. Mater. Electron. 2012, 23, 2117–2122. [Google Scholar] [CrossRef]
- Saifeldeen, M.A.; Fouad, N.; Huang, H.; Wu, Z. Advancement of long-gauge carbon fiber line sensors for strain measurements in structures. J. Intell. Mater. Syst. Struct. 2017, 28, 878–887. [Google Scholar] [CrossRef]
- Conor, P.C.; Owston, C.N. Electrical Resistance of Single Carbon Fibres. Nature 1969, 223, 1146–1147. [Google Scholar] [CrossRef]
- Owston, C.N. Electrical properties of single carbon fibres. J. Phys. D Appl. Phys. 1970, 3, 1615–1626. [Google Scholar] [CrossRef]
- Deteresa, S.J. Piezoresistivity and failure of carbon filaments in axial compression. Carbon 1991, 29, 397–409. [Google Scholar] [CrossRef]
- Blazewicz, S.; Patalita, B.; Touzain, P. Study of piezoresistance effect in carbon fibers. Carbon 1997, 35, 1613–1618. [Google Scholar] [CrossRef]
- Wang, X.; Fu, X.; Chung, D. Strain sensing using carbon fiber. J. Mater. Res. 1999, 14, 790–802. [Google Scholar] [CrossRef]
- Cho, J.W.; Choi, J.S.; Yoon, Y.S. Electromechanical behavior of hybrid carbon/glass fiber composites with tension and bending. J. Appl. Polym. Sci. 2002, 83, 2447–2453. [Google Scholar] [CrossRef]
- Wang, X.; Chung, D. Continuous carbon fibre epoxy-matrix composite as a sensor of its own strain. Smart Mater. Struct. 1996, 5, 796–800. [Google Scholar] [CrossRef]
- Huang, H.; Wu, Z. Small signal recognition system of CFRP strips during low strain rate tensile testing. J. Appl. Mech. 2010, 13, 963–970. [Google Scholar]
- Huang, H.; Wu, Z. Static and dynamic measurement of low-level strains with carbon fibers. Sens. Actuators A Phys. 2012, 183, 140–147. [Google Scholar] [CrossRef]
- Saifeldeen, M.; Fouad, N.; Huang, H.; Wu, Z. Stabilization of electrical sensing properties of carbon fiber sensors using pre-tensioning approach. Smart Mater. Struct. 2016, 26, 015012. [Google Scholar] [CrossRef]
- Wang, X.; Chung, D. Self-monitoring of fatigue damage and dynamic strain in carbon fiber polymer-matrix composite. Compos. Part B Eng. 1998, 29, 63–73. [Google Scholar] [CrossRef]
- Angelidis, N.; Wei, C.; Irving, P. The electrical resistance response of continuous carbon fibre composite laminates to mechanical strain. Compos. Part A Appl. Sci. Manuf. 2004, 35, 1135–1147. [Google Scholar] [CrossRef]
- Bashmal, S.; Siddiqui, M.; Arif, A.F.M. Experimental and Numerical Investigations on the Mechanical Characteristics of Carbon Fiber Sensors. Sensors 2017, 17, 2026. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Chung, D. Self-sensing of flexural strain and damage in carbon fiber polymer-matrix composite by electrical resistance measurement. Carbon 2006, 44, 2739–2751. [Google Scholar] [CrossRef]
- Abry, J.; Choi, Y.; Chateauminois, A.; Dalloz, B.; Giraud, G.; Salvia, M. In-situ monitoring of damage in CFRP laminates by means of AC and DC measurements. Compos. Sci. Technol. 2001, 61, 855–864. [Google Scholar] [CrossRef]
- Wen, J.; Xia, Z.; Choy, F. Damage detection of carbon fiber reinforced polymer composites via electrical resistance measurement. Compos. Part B Eng. 2011, 42, 77–86. [Google Scholar] [CrossRef]
- Wang, S.; Wang, D.; Chung, D.; Chung, J.H. Method of sensing impact damage in carbon fiber polymer-matrix composite by electrical resistance measurement. J. Mater. Sci. 2006, 41, 2281–2289. [Google Scholar] [CrossRef]
- Abry, J.; Bochard, S.; Chateauminois, A.; Salvia, M.; Giraud, G. In situ detection of damage in CFRP laminates by electrical resistance measurements. Compos. Sci. Technol. 1999, 59, 925–935. [Google Scholar] [CrossRef]
- Wang, S.; Chung, D. Mechanical damage in carbon fiber polymer-matrix composite, studied by electrical resistance measurement. Compos. Interfaces 2002, 9, 51–60. [Google Scholar] [CrossRef]
- Irving, P.; Thiagarajan, C. Fatigue damage characterization in carbon fibre composite materials using an electrical potential technique. Smart Mater. Struct. 1998, 7, 456. [Google Scholar] [CrossRef]
- Weber, I.; Schwartz, P. Monitoring bending fatigue in carbon-fibre/epoxy composite strands: A comparison between mechanical and resistance techniques. Compos. Sci. Technol. 2001, 61, 849–853. [Google Scholar] [CrossRef]
- Salvado, R.; Lopes, C.; Szojda, L.; Araújo, P.; Gorski, M.; Velez, F.J.; Castro-Gomes, J.; Krzywon, R. Carbon fiber epoxy composites for both strengthening and health monitoring of structures. Sensors 2015, 15, 10753–10770. [Google Scholar] [CrossRef] [PubMed]
- Kaddour, A.; Al-Salehi, F.; Al-Hassani, S.; Hinton, M. Electrical resistance measurement technique for detecting failure in CFRP materials at high strain rates. Compos. Sci. Technol. 1994, 51, 377–385. [Google Scholar] [CrossRef]
- Kalashnyk, N.; Faulques, E.; Schjødt-Thomsen, J.; Jensen, L.R.; Rauhe, J.C.M.; Pyrz, R. Monitoring self-sensing damage of multiple carbon fiber composites using piezoresistivity. Synth. Met. 2017, 224, 56–62. [Google Scholar] [CrossRef]
- Todoroki, A.; Omagari, K. Detection of matrix crack density of CFRP using an electrical potential change method with multiple probes. J. Solid Mech. Mater. Eng. 2008, 2, 718–729. [Google Scholar] [CrossRef][Green Version]
- Kovalovs, A.; Rucevskis, S.; Kulakov, V.; Aniskevich, A. Delamination Detection in Carbon Fibre Reinforced Composites Using Electrical Resistance Measurement; IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2016; p. 012010. [Google Scholar]
- Zhu, S.; Chung, D. Analytical model of piezoresistivity for strain sensing in carbon fiber polymer–matrix structural composite under flexure. Carbon 2007, 45, 1606–1613. [Google Scholar] [CrossRef]
- Xiao, J.; Li, Y.; Fan, W. A laminate theory of piezoresistance for composite laminates. Compos. Sci. Technol. 1999, 59, 1369–1373. [Google Scholar] [CrossRef]
- Todoroki, A.; Samejima, Y.; Hirano, Y.; Matsuzaki, R. Piezoresistivity of unidirectional carbon/epoxy composites for multiaxial loading. Compos. Sci. Technol. 2009, 69, 1841–1846. [Google Scholar] [CrossRef]
- Luan, C.; Yao, X.; Liu, C.; Fu, J. Carbon fiber-thermoplastic composite 3D printing technology and its self-monitoring. J. Zhejiang Univ. (Eng. Sci.) 2017, 51, 1808–1814. [Google Scholar]
- Yao, X.; Luan, C.; Zhang, D.; Lan, L.; Fu, J. Evaluation of carbon fiber-embedded 3D printed structures for strengthening and structural-health monitoring. Mater. Des. 2017, 114, 424–432. [Google Scholar] [CrossRef]
- Timoshenko, S.P. History of Strength of Materials, with a Brief Account of the History of Theory of Elasticity and Theory of Structures; McGraw-Hill Book Company, Inc.: New York, NY, USA; Toronto, ON, Canada; London, UK, 1953. [Google Scholar]
- Bauchau, O.A.; Craig, J.I. Euler-Bernoulli beam theory. In Structural Analysis; Springer: Dordrecht, The Netherlands, 2009; pp. 173–221. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loading Position | x = 30 mm | x = 50 mm | x = 70 mm | x = 80 mm | x = 90 mm | x = 110 mm | x = 130 mm |
|---|---|---|---|---|---|---|---|
| Specimen 1 | 7.41 | 9.22 | 10.30 | 11.10 | 10.90 | 9.21 | 7.04 |
| Specimen 2 | 6.95 | 9.72 | 10.99 | 11.44 | 10.45 | 9.81 | 6.83 |
| Specimen 3 | 6.71 | 9.51 | 10.93 | 11.03 | 10.69 | 9.39 | 6.56 |
| Average | 7.02 ± 0.36 | 9.48 ± 0.25 | 10.74 ± 0.38 | 11.19 ± 0.22 | 10.68 ± 0.23 | 9.47 ± 0.31 | 6.81 ± 0.24 |
| Parameters | PLA Matrix | Carbon Fiber Tow | Epoxy Resin |
|---|---|---|---|
| Ei | 65 MPa | 230 GPa | 80 MPa |
| Vi | 95% | 0.029% | 4.971% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luan, C.; Yao, X.; Shen, H.; Fu, J. Self-Sensing of Position-Related Loads in Continuous Carbon Fibers-Embedded 3D-Printed Polymer Structures Using Electrical Resistance Measurement. Sensors 2018, 18, 994. https://doi.org/10.3390/s18040994
Luan C, Yao X, Shen H, Fu J. Self-Sensing of Position-Related Loads in Continuous Carbon Fibers-Embedded 3D-Printed Polymer Structures Using Electrical Resistance Measurement. Sensors. 2018; 18(4):994. https://doi.org/10.3390/s18040994
Chicago/Turabian StyleLuan, Congcong, Xinhua Yao, Hongyao Shen, and Jianzhong Fu. 2018. "Self-Sensing of Position-Related Loads in Continuous Carbon Fibers-Embedded 3D-Printed Polymer Structures Using Electrical Resistance Measurement" Sensors 18, no. 4: 994. https://doi.org/10.3390/s18040994
APA StyleLuan, C., Yao, X., Shen, H., & Fu, J. (2018). Self-Sensing of Position-Related Loads in Continuous Carbon Fibers-Embedded 3D-Printed Polymer Structures Using Electrical Resistance Measurement. Sensors, 18(4), 994. https://doi.org/10.3390/s18040994