Micro-Doppler Effect Removal in ISAR Imaging by Promoting Joint Sparsity in Time-Frequency Domain


Abstract
:
1. Introduction
2. ISAR Imaging Model
3. Joint Sparsity of Main Body Signal in Time-Frequency Domain
4. M-D Effect Removal by Promoting Joint Sparsity
4.1. Problem Formulation for Joint Sparse Recovery
4.2. Brief Review of SL0 Algorithm
4.3. Proposed Method
| Algorithm 1 Proposed smoothed (SL2L0) algorithm | |
| Input: | The echo sampling vector , the overcompleted dictionary , positive constants , the maximum number of outer loop iterations , the maximum number of inner loop iterations , a suitable decreasing sequence , the tolerance values and ; initialization and . |
| Iteration: | |
| For ; ; ; ; ; For ; ; ; if , then break; End ; if or , then break; End | |
| Output: | |
5. Experimental Results and Performance Comparisons
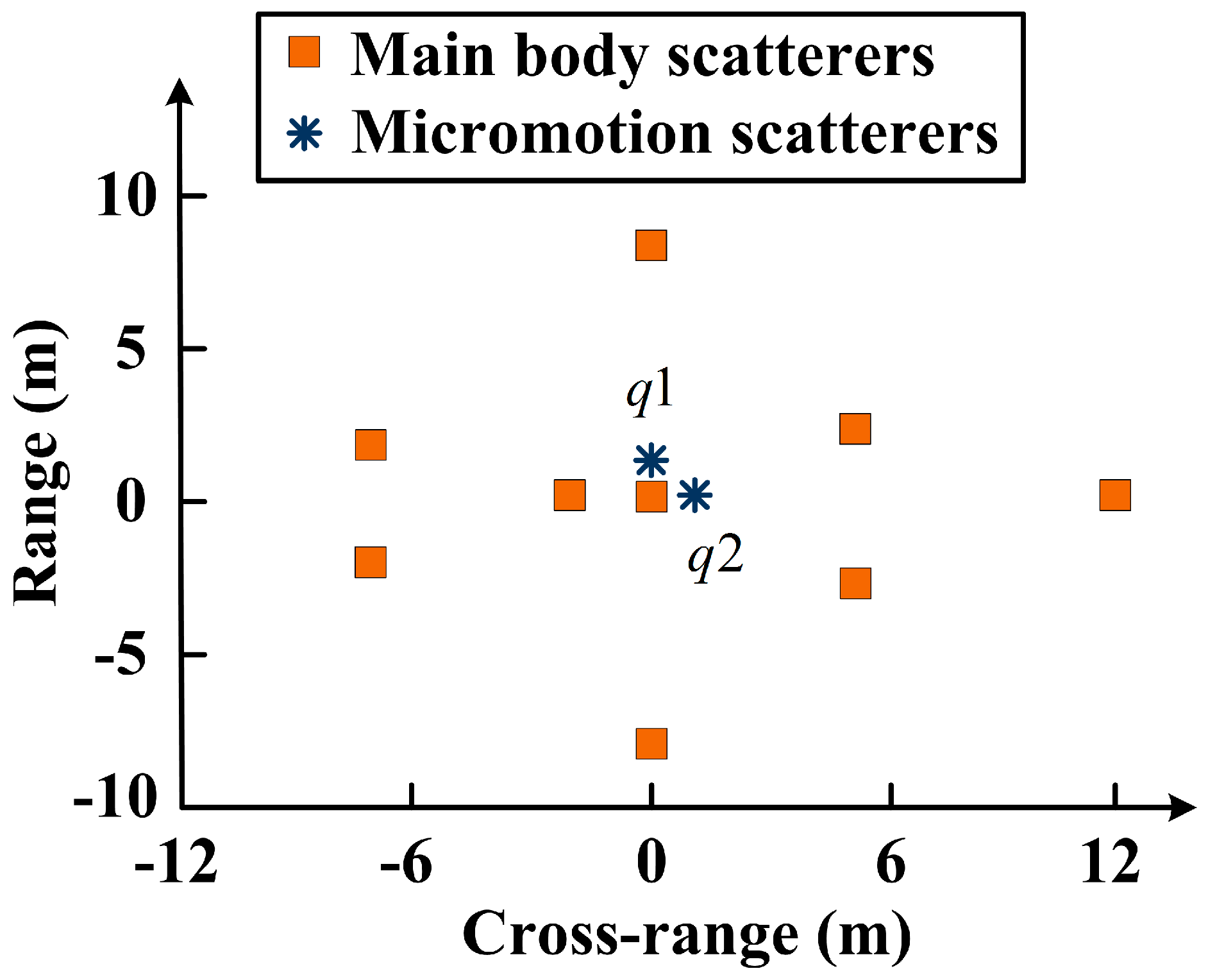
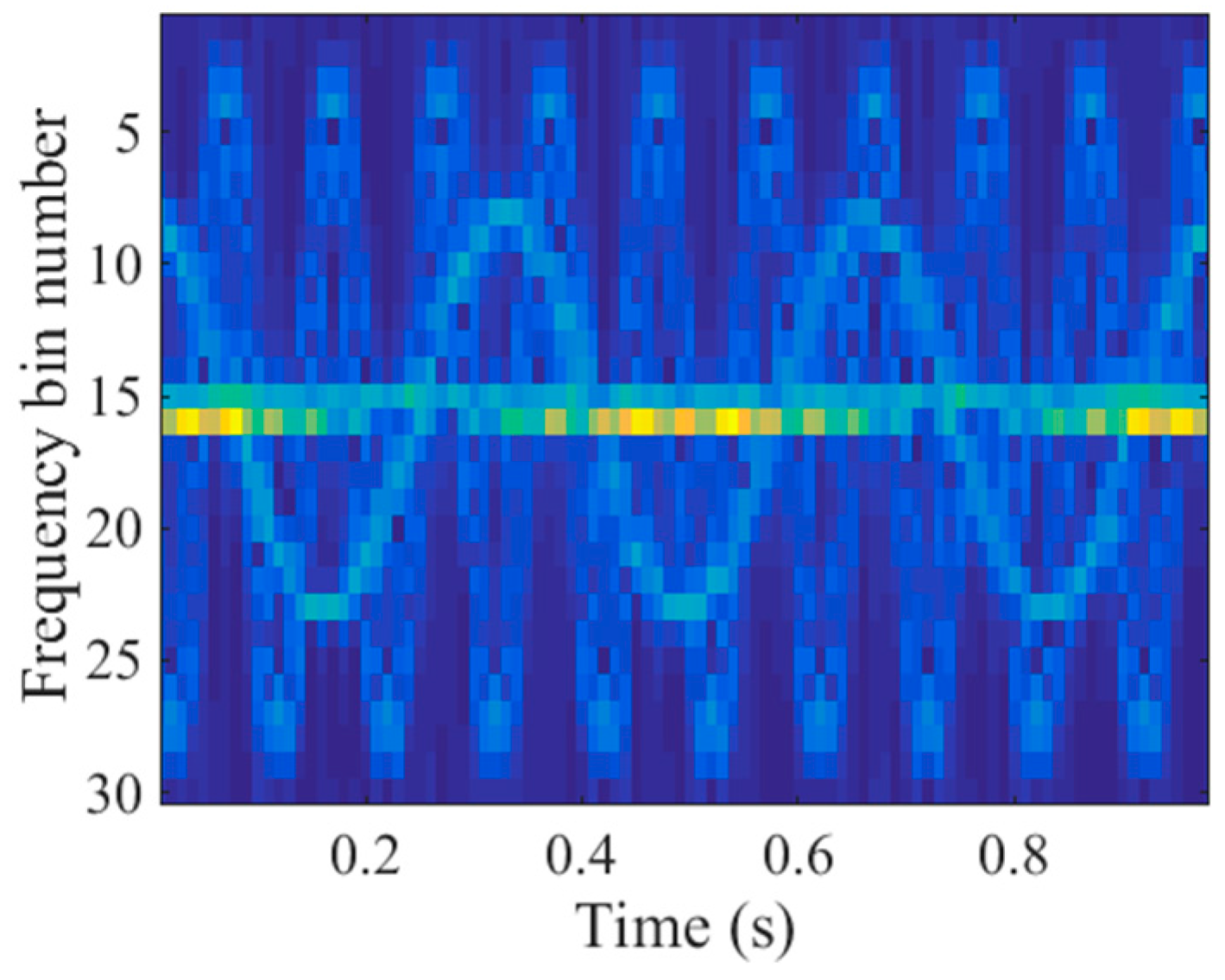
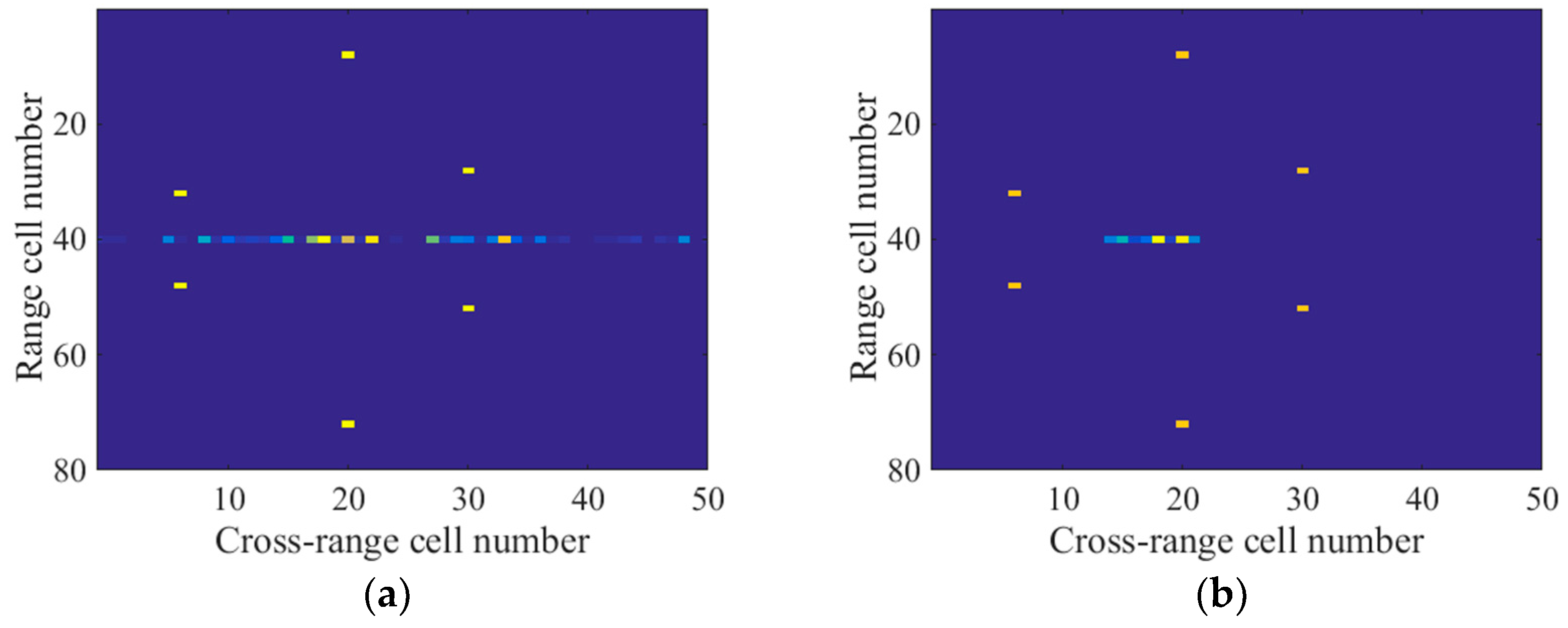
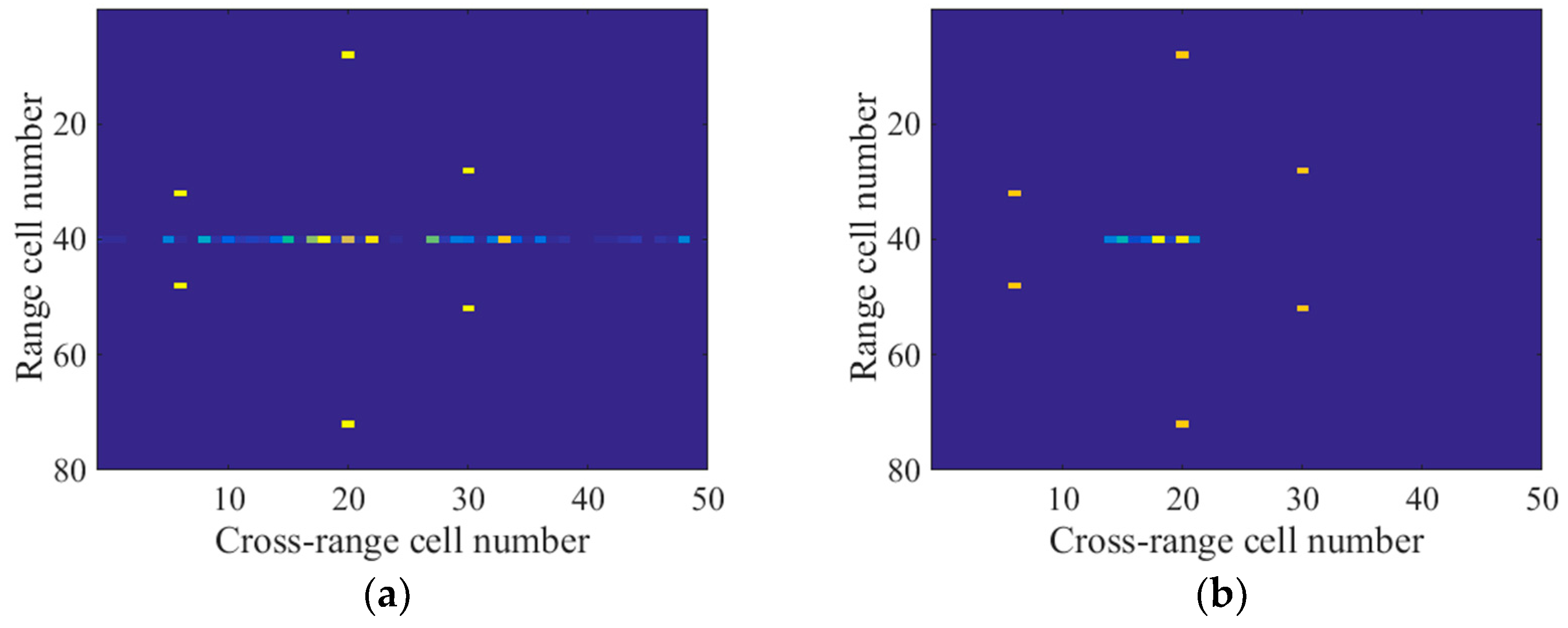
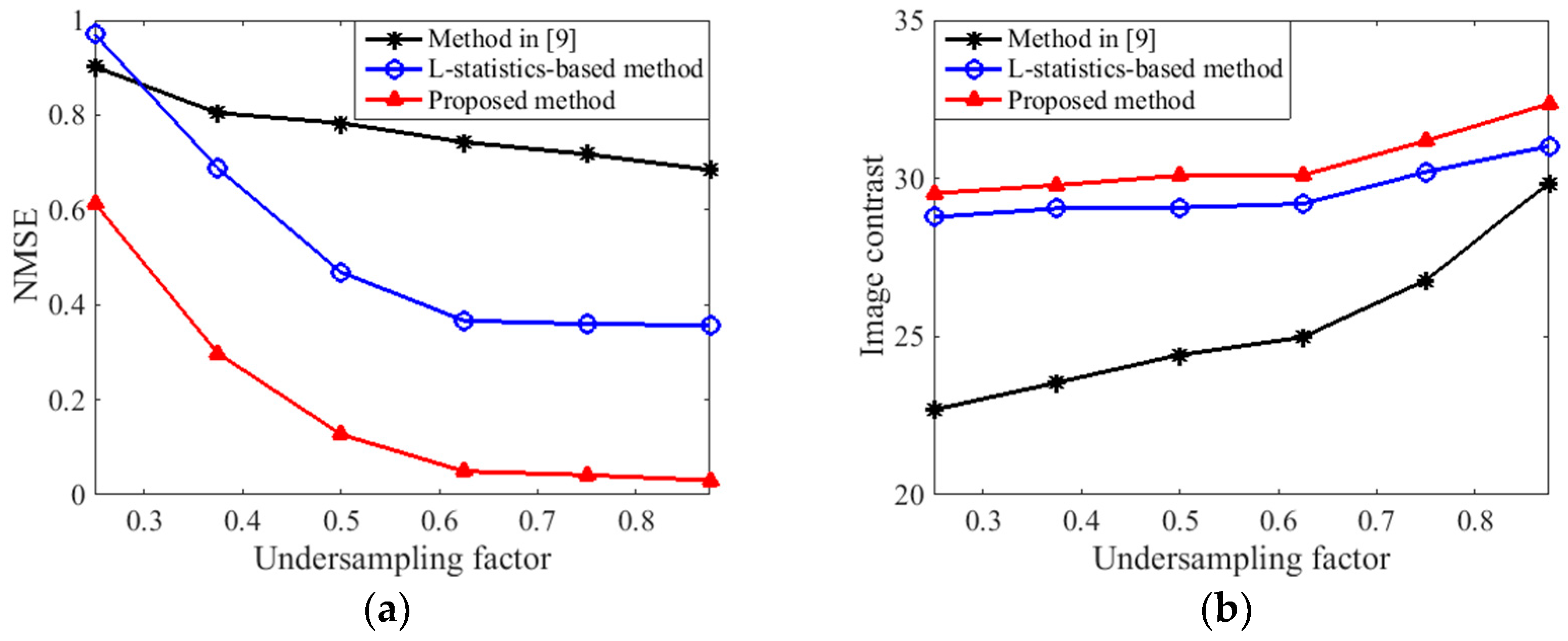
5.1. Experiments Using the Point-Scattering Model
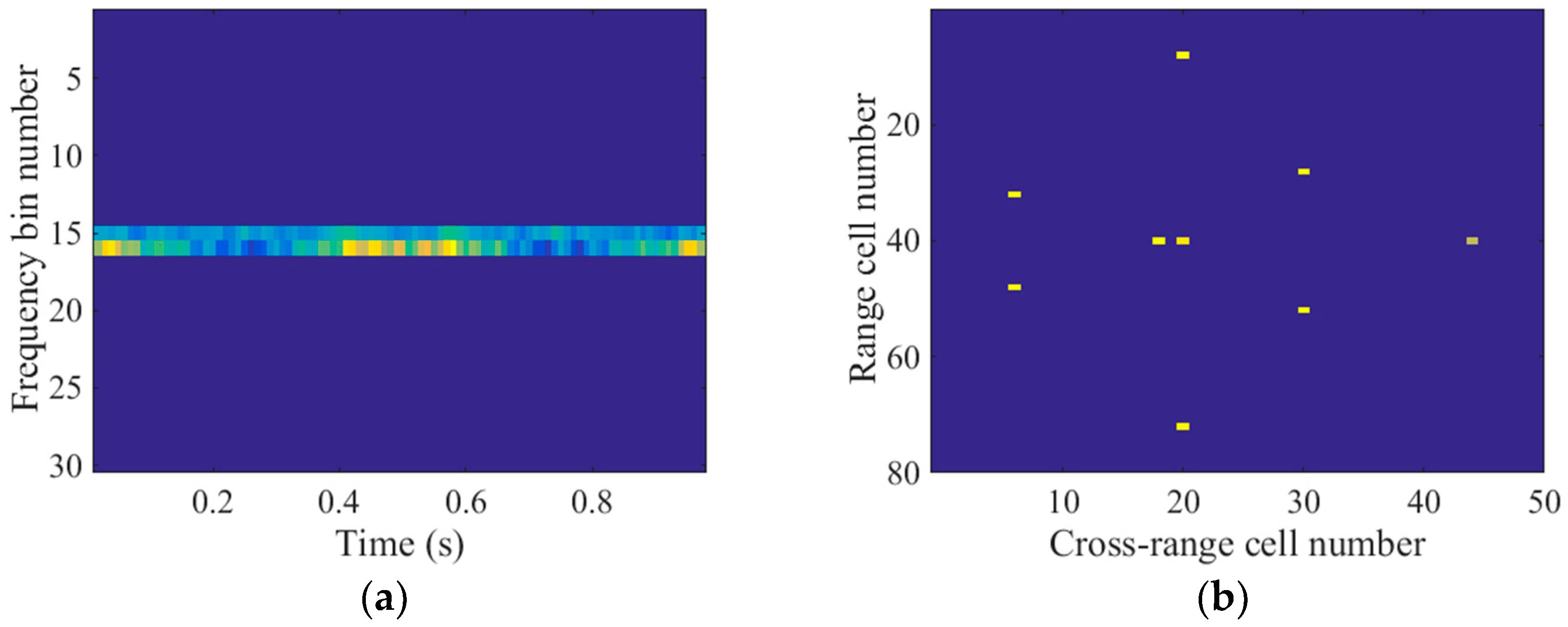
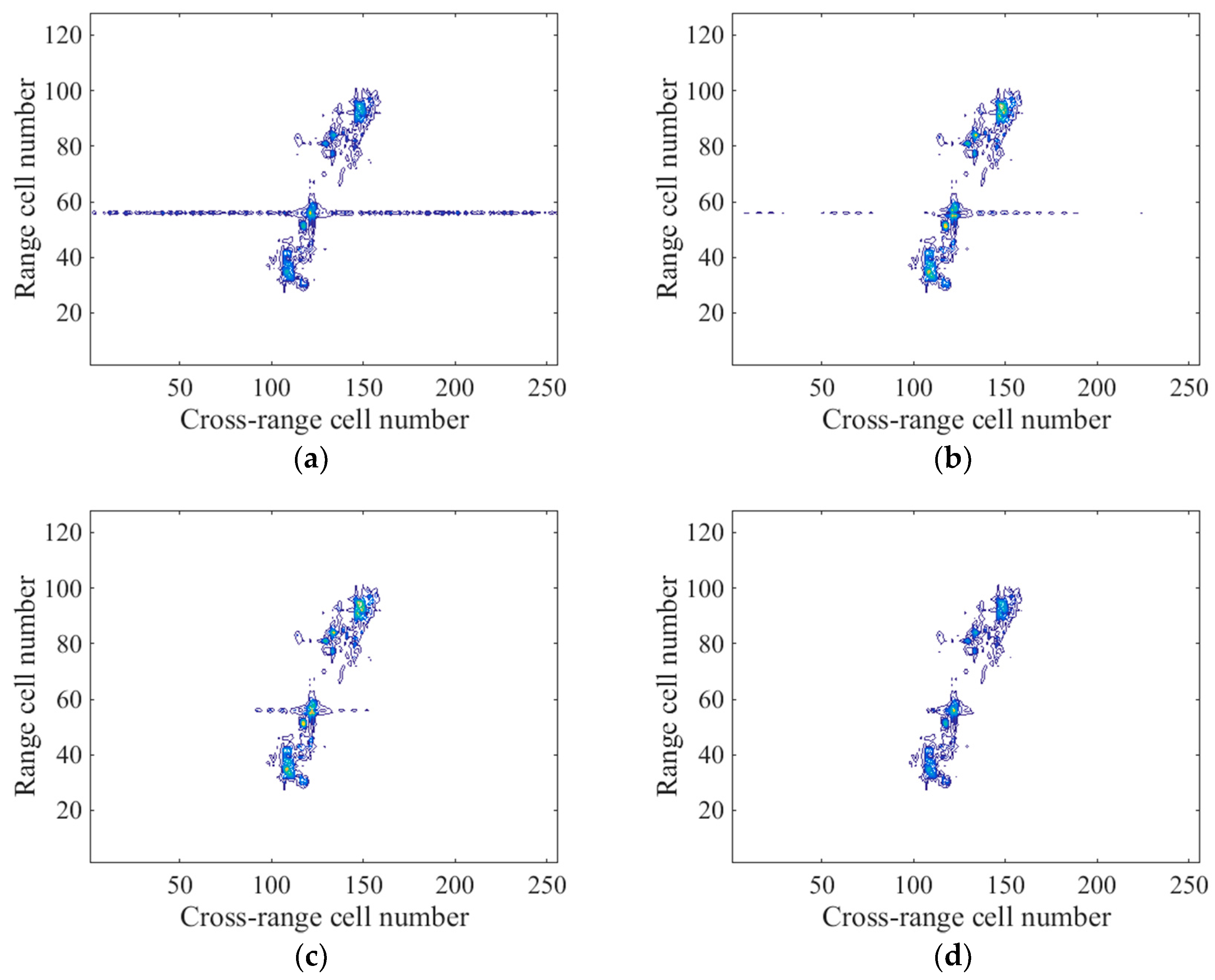
5.2. Experiments Using EM Computation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, V.C. Analysis of radar micro-Doppler with time-frequency transform. In Proceedings of the Tenth IEEE Workshop on Statistical Signal and Array Processing, Pocono Manor, PA, USA, 16 August 2000; pp. 463–466. [Google Scholar]
- Chen, V.C.; Li, F.; Ho, S.-S.; Wechsler, H. Analysis of micro-Doppler signatures. IEE Proc. Radar Sonar Navig. 2003, 150, 271–276. [Google Scholar] [CrossRef]
- Chen, V.C.; Li, F.; Ho, S.-S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Li, J.; Ling, H. Application of adaptive chirplet representation for ISAR feature extraction from targets with rotating parts. Proc. Inst. Electr. Eng. Radar Sonar Navig. 2003, 150, 284–291. [Google Scholar] [CrossRef]
- Liu, H.C.; Jiu, B.; Liu, H.W.; Bao, Z. A novel ISAR imaging algorithm for micromotion targets based on multiple sparse Bayesian learning. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1772–1776. [Google Scholar]
- Zhang, Q.; Yeo, T.S.; Tan, H.S.; Luo, Y. Imaging of a moving target with rotating parts based on the Hough transform. IEEE Trans. Geosci. Remote Sens. 2008, 46, 291–299. [Google Scholar] [CrossRef]
- Sun, L.; Lu, X.F.; Chen, W.D. Joint sparsity-based ISAR imaging for micromotion targets. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1734–1738. [Google Scholar] [CrossRef]
- Stanković, L.; Orović, I.; Stanković, S.; Amin, M. Compressive sensing based separation of nonstationary and stationary signals overlapping in time-frequency. IEEE Trans. Aerosp. Electron. Syst. 2013, 61, 4562–4572. [Google Scholar] [CrossRef]
- Zhang, R.; Li, G.; Zhang, Y.D. Micro-Doppler interference removal via histogram analysis in time-frequency domain. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 755–768. [Google Scholar] [CrossRef]
- Bai, X.R.; Zhou, F. Radar imaging of micromotion targets from corrupted data. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2789–2802. [Google Scholar] [CrossRef]
- Liu, Z.; Wei, X.Z.; Li, X. Aliasing-free micro-Doppler analysis based on short-time compressed sensing. IET Signal Process. 2013, 8, 176–187. [Google Scholar] [CrossRef]
- Hou, Q.K.; Liu, Y.; Chen, Z.P. Reducing micro-Doppler effect in compressed sensing ISAR imaging for aircraft using limited pulses. Electron. Lett. 2015, 51, 937–939. [Google Scholar] [CrossRef]
- Bai, X.R.; Xing, M.D.; Zhou, F.; Lu, G.Y.; Bao, Z. Imaging of micromotion targets with rotating parts based on empirical-mode decomposition. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3514–3523. [Google Scholar] [CrossRef]
- Mishali, M.; Eldar, Y.C. Reduce and boost: Recovering arbitrary sets of jointly sparse vectors. IEEE Trans. Signal Process. 2008, 56, 4692–4702. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, L.F.; Bi, G.A.; Wan, C.R.; Zhang, L.R.; Zhang, H.J. Novel wideband DOA estimation based on sparse Bayesian learning with Dirichlet process priors. IEEE Trans. Signal Process. 2016, 64, 275–289. [Google Scholar] [CrossRef]
- Zeinalkhani, Z.; Banihashemi, A.H. Iterative reweighted l2/l1 recovery algorithms for compressed sensing of block sparse signals. IEEE Trans. Signal Process. 2015, 63, 4516–4531. [Google Scholar] [CrossRef]
- Chen, J.; Huo, X.M. Theoretical results on sparse representations of multiple-measurement vectors. IEEE Trans. Signal Process. 2006, 54, 4634–4643. [Google Scholar] [CrossRef]
- Bevacqua, M.; Isernia, T. Shape reconstruction via equivalence principles, constrained inverse source problems and sparsity promotion. Prog. Electromagn. Res. 2017, 158, 37–48. [Google Scholar] [CrossRef]
- Liu, Y.; You, P.; Zhu, C.; Tan, X.; Liu, Q.H. Synthesis of sparse or thinned linear and planar arrays generating reconfigurable multiple real patterns by iterative linear programming. Prog. Electromagn. Res. 2016, 155, 27–38. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B.; Boyd, S.P. Enhancing sparsity by reweighted l1 minimization. J. Fourier Anal. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Sun, S.; Kooij, B.J.; Yarovoy, A.G. A linear model for microwave imaging of highly conductive scatterers. IEEE Trans. Microw. Theory Technol. 2018, 66, 1149–1164. [Google Scholar] [CrossRef]
- Zeng, J.; Lin, S.; Wang, Y.; Xu, Z. L1/2 regularization: Convergence of iterative half thresholding algorithm. IEEE Trans. Signal Process. 2014, 62, 2317–2329. [Google Scholar] [CrossRef]
- Mohimani, H.; Babaie-Zadeh, M.; Jutten, C. A fast approach for overcomplete sparse decomposition based on smoothed l0 norm. IEEE Trans. Signal Process. 2009, 57, 289–301. [Google Scholar] [CrossRef]
- Gao, X.Z.; Liu, Z.; Chen, H.W.; Li, X. Fourier-sparsity integrated method for complex target ISAR imagery. Sensors 2015, 15, 2723–2736. [Google Scholar] [CrossRef] [PubMed]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Wang, Y.X.; Ling, H.; Chen, V.C. ISAR motion compensation via adaptive joint time–frequency technique. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 670–677. [Google Scholar] [CrossRef]
- Boashash, B.; Black, P. An efficient real-time implementation of the Wigner-Ville distribution. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1611–1618. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Tan, Z.; Yang, P.; Nehorai, A. Joint sparse recovery method for compressed sensing with structured dictionary mismatches. IEEE Trans. Signal Process. 2014, 62, 4997–5008. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, L.F.; Bi, G.A.; Wan, C.R.; Yang, L. Enhanced ISAR imaging by exploiting the continuity of the target scene. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5736–5750. [Google Scholar] [CrossRef]
- Anitori, L.; Maleki, A.; Otten, M.; Baraniuk, R.G.; Hoogeboom, P. Design and analysis of compressed sensing radar detectors. IEEE Trans. Signal Process. 2013, 61, 813–827. [Google Scholar] [CrossRef]
- Rius, J.; Ferrando, M.; Jofre, L. GRECO: Graphical electromagnetic computing for RCS prediction in real time. IEEE Trans. Antennas Propag. 1993, 35, 7–17. [Google Scholar] [CrossRef]
- Qiu, W.; Giusti, E.; Bacci, A.; Martorella, M.; Berizzi, F.; Zhao, H.Z.; Fu, Q. Compressive sensing–based algorithm for passive bistatic ISAR with DVB-T signals. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2166–2180. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Image Entropy |
|---|---|
| The FFT-based method | 5.977 |
| The method in [9] | 4.865 |
| The L-statistics-based method | 4.803 |
| The proposed method | 4.204 |
| Method | Computational Time (s) |
|---|---|
| The method in [9] | 5.529 |
| The L-statistics-based method | 3.406 |
| The proposed method | 1.811 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Chen, W. Micro-Doppler Effect Removal in ISAR Imaging by Promoting Joint Sparsity in Time-Frequency Domain. Sensors 2018, 18, 951. https://doi.org/10.3390/s18040951
Sun L, Chen W. Micro-Doppler Effect Removal in ISAR Imaging by Promoting Joint Sparsity in Time-Frequency Domain. Sensors. 2018; 18(4):951. https://doi.org/10.3390/s18040951
Chicago/Turabian StyleSun, Lin, and Weidong Chen. 2018. "Micro-Doppler Effect Removal in ISAR Imaging by Promoting Joint Sparsity in Time-Frequency Domain" Sensors 18, no. 4: 951. https://doi.org/10.3390/s18040951
APA StyleSun, L., & Chen, W. (2018). Micro-Doppler Effect Removal in ISAR Imaging by Promoting Joint Sparsity in Time-Frequency Domain. Sensors, 18(4), 951. https://doi.org/10.3390/s18040951