Detection of Anomalous Noise Events on Low-Capacity Acoustic Nodes for Dynamic Road Traffic Noise Mapping within an Hybrid WASN





Abstract
:1. Introduction
2. Related Work
2.1. Acoustic Event Detection in Urban Environments
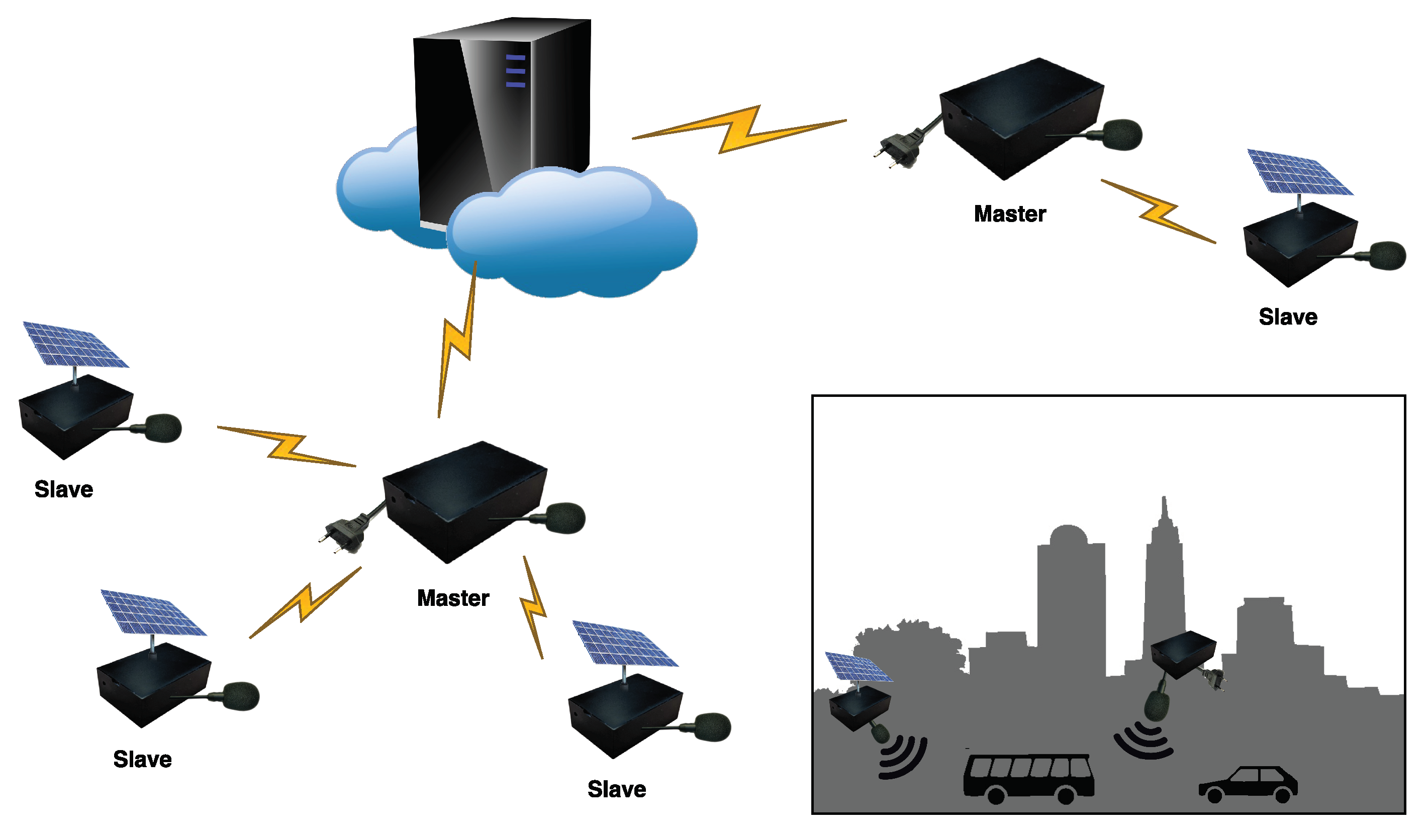
2.2. Networks for Noise Monitoring
3. ANED Lo-Cap: An Anomalous Noise Event Detector for Low-Capacity Acoustic Sensors
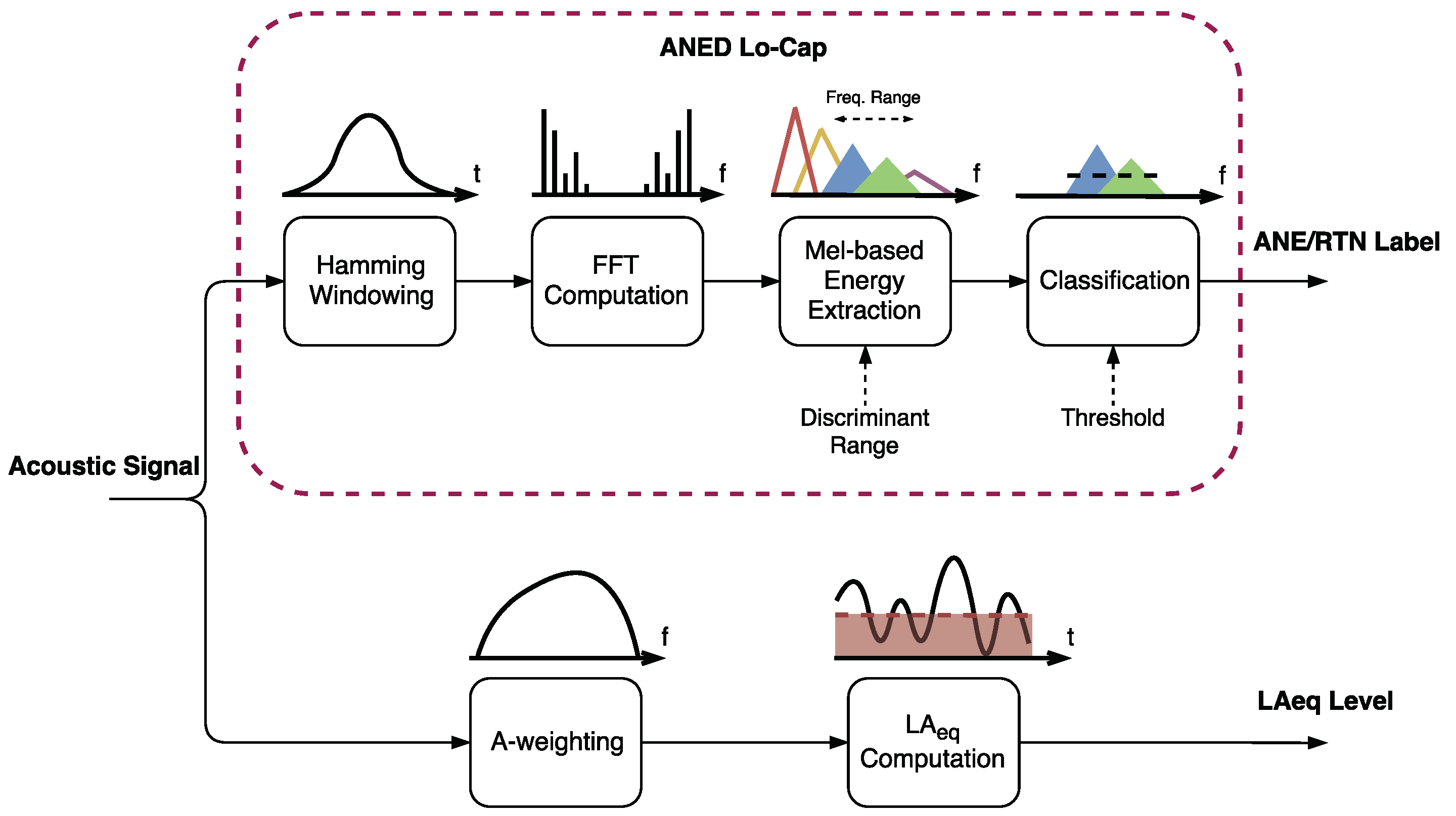
3.1. General Description
3.2. Acoustic Signal Parameterization
3.3. Optimization of the ANED Lo-Cap Configuration
3.3.1. Computation of the Probability Error Function
3.3.2. Selection of Frequency Range
4. Experimental Section
4.1. Acoustic Database
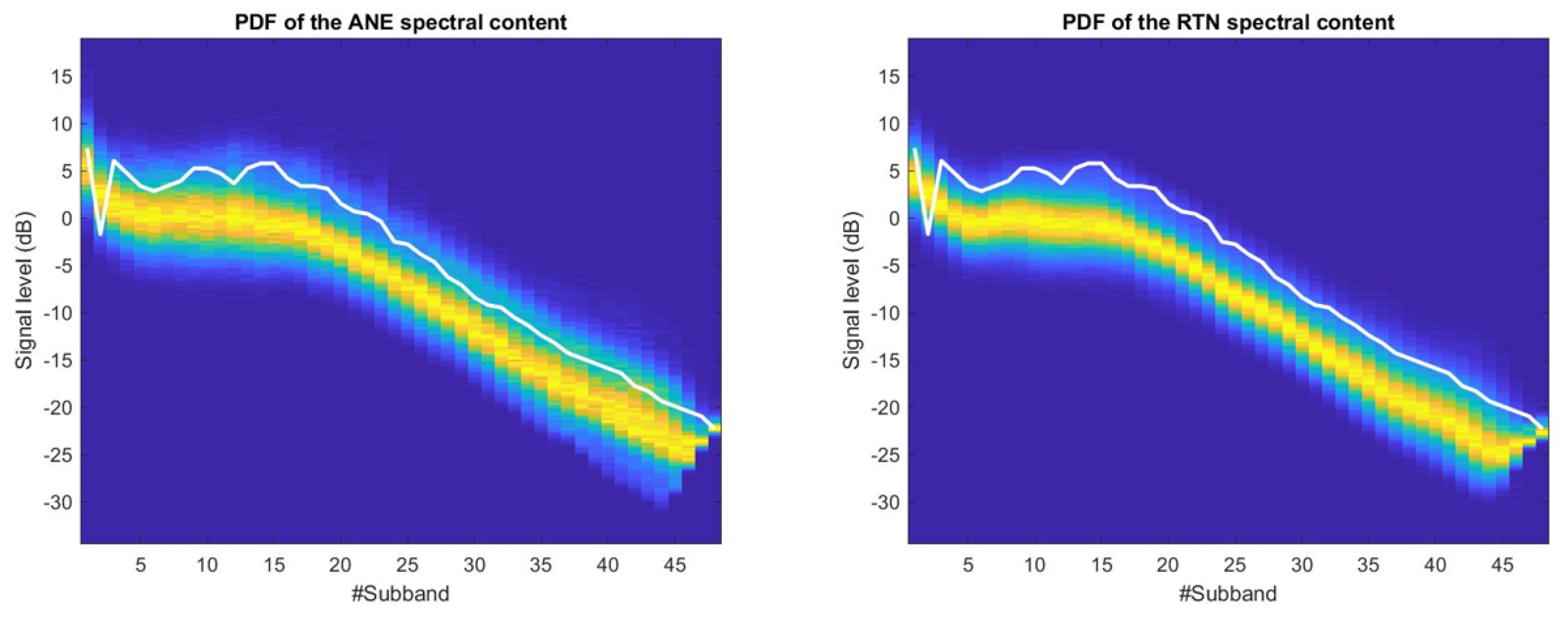
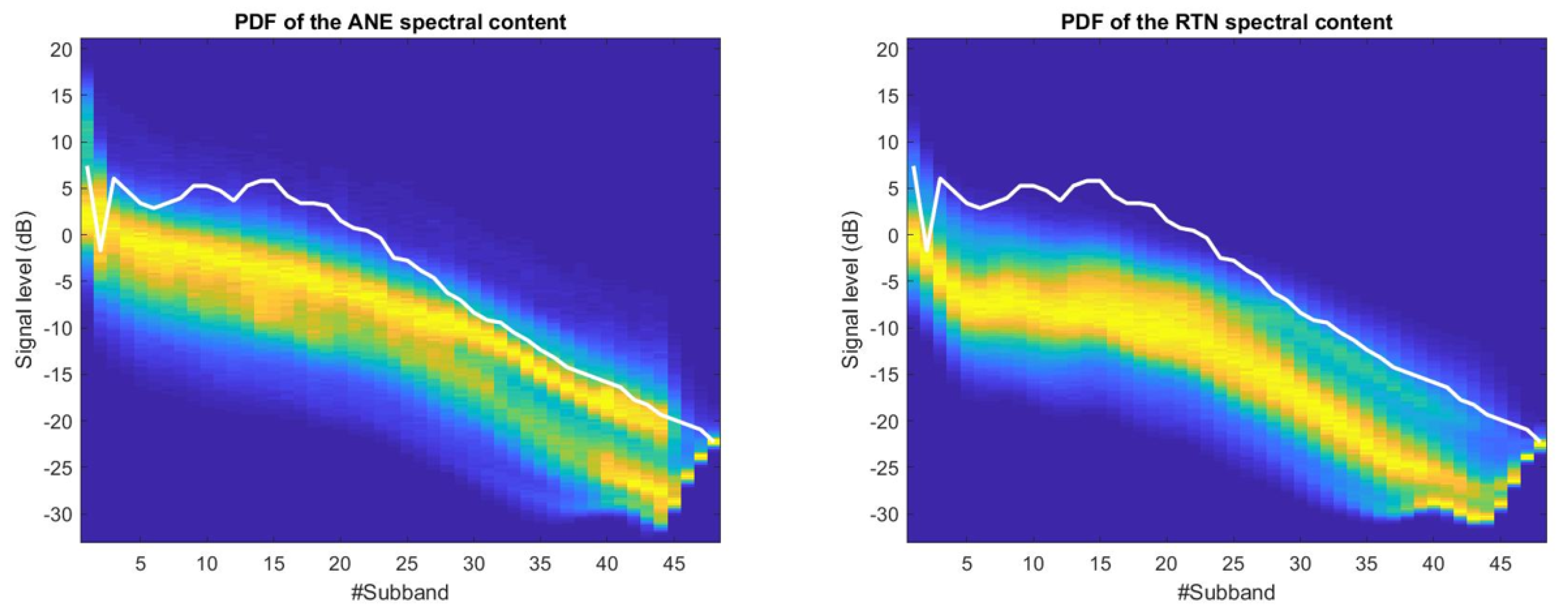
4.2. 2D-PDF Subband Analysis and Selection
4.2.1. Computation of the PDFs for Both Scenarios
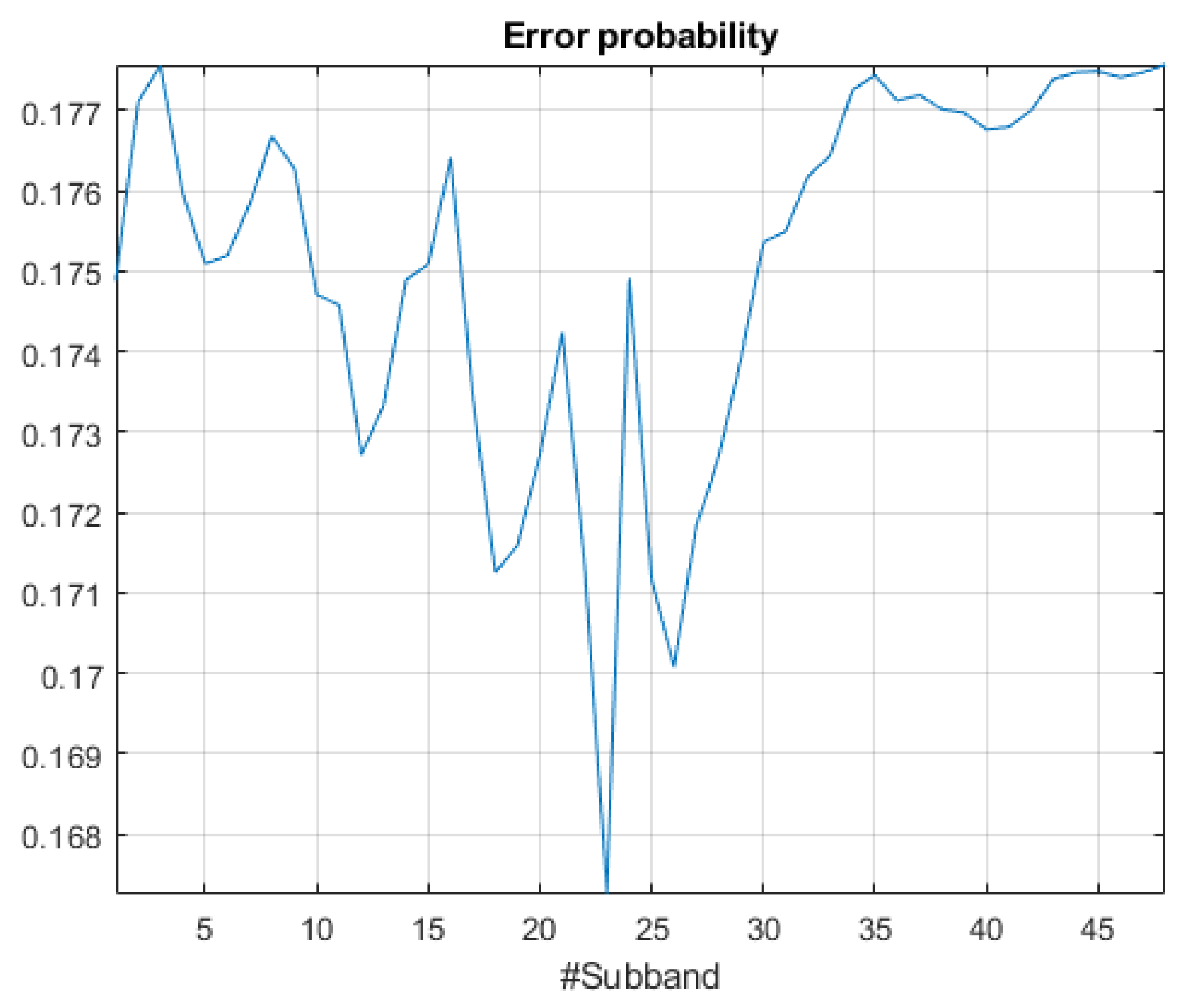
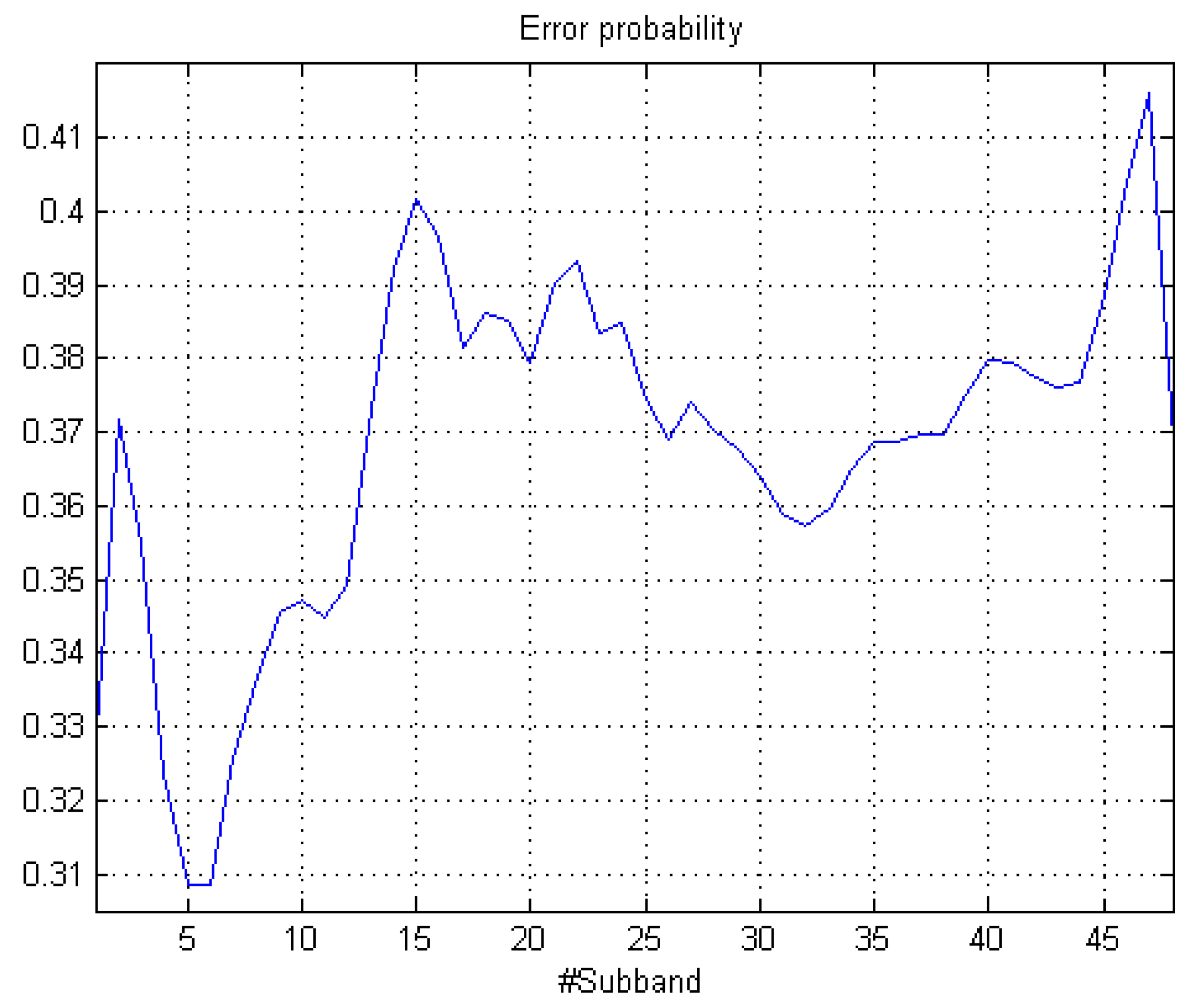
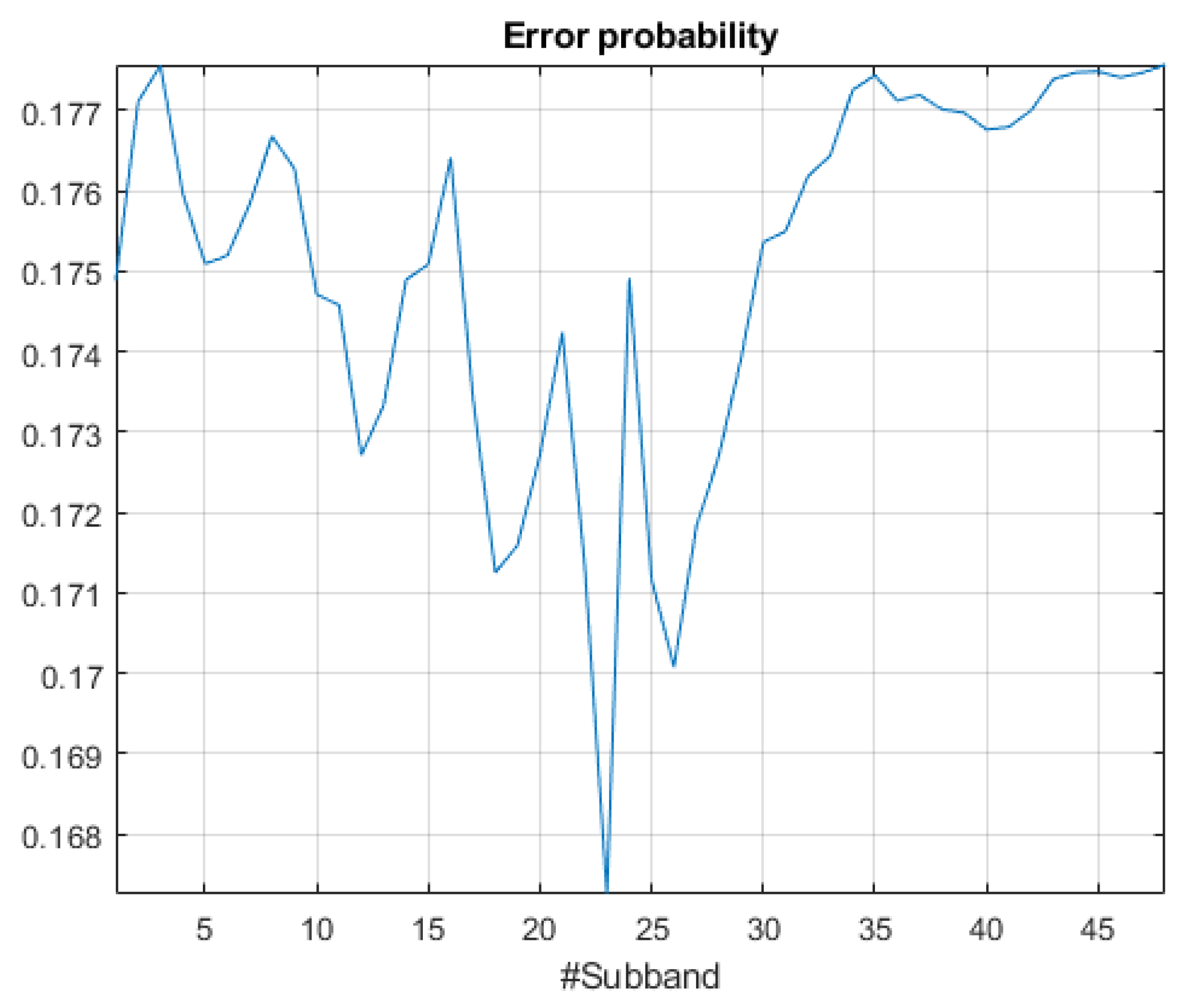
4.2.2. Subband Error Probability Calculation
5. Operations Cost Analysis of the ANED Lo-Cap
5.1. Audio Acquisition
5.2. Acoustic Signal Processing
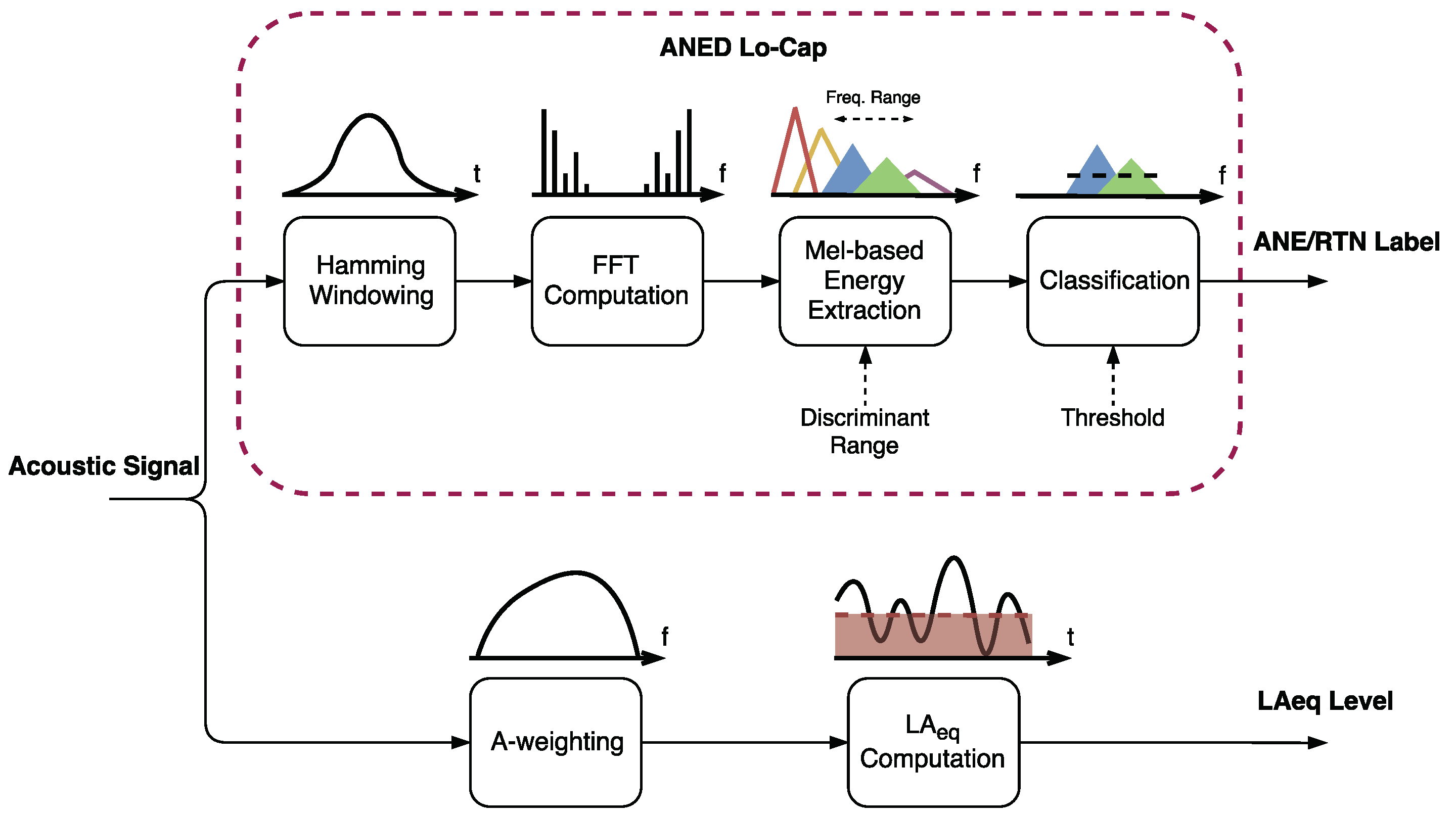
- Windowing: In order to analyze short frames of audio, a window function should be applied to the input signal in order to reduce the spectral leakage due to higher frequencies. In this implementation, the hamming window is used [44]. The computational cost associated to any windowing process depends on the number of samples of the analyzed frame if the window function is computed and stored in advance. The ANED Lo-Cap proposal uses time frames 30 ms long, thus, if the sampling frequency is 48 kHz, the window will be 1440 samples long.
- FFT Computation: The FFT is one of the most popular algorithms that computes the DFT (Discrete Fourier Transform) of a sequence reducing its complexity by factorizing the DFT matrix. The most used algorithm is the Cooley-Turkey [41], that breaks the down the DFT of N points into smaller ones, typically dividing it in two pieces of at each step. The computational cost of the FFT may vary depending on N (the number of points of the FFT) and on the methodology of implementing the algorithm over a certain hardware platform and its optimization. In our case, the FFT shall be of minimum 1440 points and maybe of 2048 after adding zero-padding if the used algorithm requires a power-of-2 size.
- Sub-band Filtering: After the FFT is computed, a triangular-shaped filter is applied to a determined subband. The computational cost of obtaining each filtered subband depends on the number of coefficients (C) of the filter, which, in its turn, depends on the sampling frequency and the number of points of the FFT. The filter is used to obtain the energy of the subband, hence, the computational cost should consider the point-to-point multiplication of the vector and the filter and the posterior integration of the resulting vector. In order to reduce the computational cost, the filter may be designed in advance considering the sampling frequency and the number of points of the FFT. After that, only a product for each bin followed by a sum of all resulting outputs will be needed. The number of operations can be reduced if the filter is only employed in the concerning subbands and all other frequencies are omitted. In our case, two Mel subbands shall be implemented as it is the combination with a lower probability of error.
5.3. Commercial Board Comparison
6. Discussion
6.1. Classification Accuracy of ANED Lo-Cap vs. ANED Hi-Cap
6.2. ANED Lo-Cap and Network Homogeneity
6.3. Real-Time Implementation in a Low-Cost Platform
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ADC | Analog to Digital Converter |
| AED | Acoustic Event Detection |
| ARM | Advanced RISC Machine |
| ANE | Anomalous Noise Event |
| ANED | Anomalous Noise Event Detection |
| CNOSSOS | Common Noise Assessment Methods |
| CPU | Central Processing Unit |
| DCT | Discrete Cosine Transform |
| DFT | Discrete Fourier Transform |
| DYNAMAP | DYNamic Acoustic MAPping |
| EC | European Commission |
| END | Environmental Noise Directive |
| EU | European Union |
| FFT | Fast Fourier Transform |
| FPGA | Field-Programmable Gate Array |
| GPU | Graphics Processing Unit |
| HMM | Hidden Markov Models |
| IIR | Infinite Impulse Response |
| LDD | Low Level Descriptors |
| MFCC | Mel-Frequency Cepstral Coefficients |
| MFS | Mel Frequency Subband |
| MSPS | Mega Samples per Second |
| OCC | One-Class Classifier |
| PWP | Perceptual Wavelet Packets |
| RTN | Road Traffic Noise |
| SNR | Signal to Noise Ratio |
| SVM | Support Vector Machine |
| UGMM | Universal GMM |
| WASN | Wireless Acoustic Sensor Network |
| ZCR | Zero Crossing Rate |
References
- Babisch, W. Transportation noise and cardiovascular risk. Noise Health 2008, 10, 27–33. [Google Scholar] [CrossRef] [PubMed]
- E.U. EU Directive: Directive 2002/49/EC of the European Parliament and the Council of 25 June 2002 relating to the assessment and management of environmental noise. In Official Journal of the European Communities; L 189/12; European Union: Maastricht, The Netherlands, 2002. [Google Scholar]
- Kephalopoulos, S.; Paviotti, M.; Ledee, F.A. Common Noise Assessment Methods in Europe (CNOSSOS-EU); European Union: Maastricht, The Netherlands, 2012. [Google Scholar]
- Bertrand, A. Applications and trends in wireless acoustic sensor networks: A signal processing perspective. In Proceedings of the 18th IEEE Symposium on Communications and Vehicular Technology in the Benelux (SCVT), Ghent, Belgium, 22–23 November 2011; pp. 1–6. [Google Scholar]
- Basten, T.; Wessels, P. An overview of sensor networks for environmental noise monitoring. In Proceedings of the ICSV21, Beijing China, 13–17 July 2014. [Google Scholar]
- Botteldooren, D.; De Coensel, B.; Oldoni, D.; Van Renterghem, T.; Dauwe, S. Sound monitoring networks new style. In Proceedings of the Acoustics 2011: Breaking New Ground: Annual Conference of the Australian Acoustical Society, Gold Coast, Australia, 2–4 November 2011; pp. 1–5. [Google Scholar]
- Cense—Characterization of Urban Sound Environments. Available online: http://cense.ifsttar.fr/ (accessed on 14 September 2017).
- Camps, J. Barcelona noise monitoring network. In Proceedings of the EuroNoise 2015, Maastrich, The Netherlands, 31 May–3 June 2015; EAA-NAG-ABAV: Maastrich, The Netherlands, 2015; pp. 2315–2320. [Google Scholar]
- SonYC–Sounds of New York City. Available online: https://wp.nyu.edu/sonyc (accessed on 14 September 2017).
- Hancke, G.; de Silva, B.; Hancke Jr., G. The role of advanced sensing in smart cities. Sensors 2013, 13, 393–425. [Google Scholar] [CrossRef] [PubMed]
- Wessels, P.W.; Basten, T.G. Design aspects of acoustic sensor networks for environmental noise monitoring. Appl. Acoust. 2016, 110, 227–234. [Google Scholar] [CrossRef]
- Ntalampiras, S.; Potamitis, I.; Fakotakis, N. Probabilistic Novelty Detection for Acoustic Surveillance Under Real-World Conditions. IEEE Trans. Multimed. 2011, 13, 713–719. [Google Scholar] [CrossRef]
- Paulo, J.; Fazenda, P.; Oliveira, T.; Casaleiro, J. Continuos sound analysis in urban environments supported by FIWARE platform. In Proceedings of the EuroRegio2016/TecniAcústica’16, Porto, Portugal, 13–15 June 2016; pp. 1–10. [Google Scholar]
- Ye, J.; Kobayashi, T.; Murakawa, M. Urban sound event classification based on local and global features aggregation. Appl. Acoust. 2017, 117 Pt B, 246–256. [Google Scholar] [CrossRef]
- Socoró, J.C.; Alías, F.; Alsina-Pagès, R.M. An Anomalous Noise Events Detector for Dynamic Road Traffic Noise Mapping in Real-Life Urban and Suburban Environments. Sensors 2017, 17, 2323. [Google Scholar] [CrossRef] [PubMed]
- Maijala, P.; Shuyang, Z.; Heittola, T.; Virtanen, T. Environmental noise monitoring using source classification in sensors. Appl. Acoust. 2018, 129, 258–267. [Google Scholar] [CrossRef]
- Pierre, R.L.S., Jr.; Maguire, D.J.; Automotive, C.S. The impact of A-weighting sound pressure level measurements during the evaluation of noise exposure. In Proceedings of the Conference NOISE-CON, Baltmore, Maryland, 12–14 July 2004; pp. 12–14. [Google Scholar]
- Mietlicki, F.; Mietlicki, C.; Sineau, M. An innovative approach for long-term environmental noise measurement: RUMEUR network. In Proceedings of the EuroNoise 2015, Maastrich, The Netherlands, 31 May–3 June 2015; EAA-NAG-ABAV: Maastrich, The Netherlands, 2015; pp. 2309–2314. [Google Scholar]
- Sevillano, X.; Socoró, J.C.; Alías, F.; Bellucci, P.; Peruzzi, L.; Radaelli, S.; Coppi, P.; Nencini, L.; Cerniglia, A.; Bisceglie, A.; Benocci, R.; Zambon, G. DYNAMAP—Development of low cost sensors networks for real time noise mapping. Noise Mapp. 2016, 3, 172–189. [Google Scholar] [CrossRef]
- Orga, F.; Alías, F.; Alsina-Pagès, R.M. On the Impact of Anomalous Noise Events on Road Traffic Noise Mapping in Urban and Suburban Environments. Int. J. Environ. Res. Public Health 2018, 15, 13. [Google Scholar] [CrossRef] [PubMed]
- Mermelstein, P. Distance measures for speech recognition, psychological and instrumental. Pattern Recogn. Artif. Intell. 1976, 116, 374–388. [Google Scholar]
- Alsina-Pagès, R.M.; Socoró, J.C.; Alías, F. Detecting Anomalous Noise Events on Low-Capacity Acoustic Sensor in Dynamic Road Traffic Noise Mapping. Multidiscip. Digit. Publ. Inst. Proc. 2018, 2, 136. [Google Scholar] [CrossRef]
- Ntalampiras, S. Universal background modeling for acoustic surveillance of urban traffic. Digit. Signal Process. 2014, 31, 69–78. [Google Scholar] [CrossRef]
- Aurino, F.; Folla, M.; Gargiulo, F.; Moscato, V.; Picariello, A.; Sansone, C. One-Class SVM Based Approach for Detecting Anomalous Audio Events. In Proceedings of the 2014 International Conference on Intelligent Networking and Collaborative Systems, Salerno, Italy, 10–12 September 2014; pp. 145–151. [Google Scholar] [CrossRef]
- Salamon, J.; Jacoby, C.; Bello, J.P. A Dataset and Taxonomy for Urban Sound Research. In Proceedings of the 22Nd ACM International Conference on Multimedia, Orlando, FL, USA, 3–7 Novemver 2014; ACM: New York, NY, USA, 2014; pp. 1041–1044. [Google Scholar] [CrossRef]
- Foggia, P.; Petkov, N.; Saggese, A.; Strisciuglio, N.; Vento, M. Reliable detection of audio events in highly noisy environments. Pattern Recogn. Lett. 2015, 65, 22–28. [Google Scholar] [CrossRef]
- Foggia, P.; Petkov, N.; Saggese, A.; Strisciuglio, N.; Vento, M. Audio Surveillance of Roads: A System for Detecting Anomalous Sounds. IEEE Trans. Intell. Transp. Syst. 2016, 17, 279–288. [Google Scholar] [CrossRef]
- Alías, F.; Alsina-Pagès, R.M.; Socoró, J.C.; Orga, F.; Nencini, L. Performance analysis of the low-cost acoustic sensors developed for the DYNAMAP project: A case study in the Milan urban area. J. Acoust. Soc. Am. 2017, 141, 3883–3884. [Google Scholar] [CrossRef]
- Kjaer, B. Noise Monitoring Terminal Type 3639. 2015. Available online: https://www.bksv.com/-/media/literature/Product-Data/bp2379.ashx (accessed on 18 April 2018).
- Davis, L. Model 831-NMS Permanent Noise Monitoring System. 2015. Available online: https://www.johnmorrisgroup.com/NZ/Product/10206/Model-831-NMS-Permenant-Noise-Monitoring-System (accessed on 18 April 2018).
- Paulo, J.; Fazenda, P.; Oliveira, T.; Carvalho, C.; Félix, M. Framework to monitor sound events in the city supported by the FIWARE platform. In Proceedings of the 46o Congreso Español de Acústica (TecniAcústica), Valencia, Spain, 21–23 October 2015; pp. 21–23. [Google Scholar]
- Wang, C.; Chen, G.; Dong, R.; Wang, H. Traffic noise monitoring and simulation research in Xiamen City based on the Environmental Internet of Things. Int. J. Sustain. Dev. World Ecol. 2013, 20, 248–253. [Google Scholar] [CrossRef]
- Nencini, L.; Rosa, P.D.; Ascari, E.; Vinci, B.; Alexeeva, N. SENSEable Pisa: A wireless sensor network for real-time noise mapping. In Proceedings of the EURONOISE, Prague, Czech Republic, 10–13 June 2012; Volume 12, pp. 10–13. [Google Scholar]
- Bell, M.C.; Galatioto, F. Novel wireless pervasive sensor network to improve the understanding of noise in street canyons. Appl. Acoust. 2013, 74, 169–180. [Google Scholar] [CrossRef]
- Domínguez, F.; Dauwe, S.; Cariolaro, D.; Touhafi, A.; Dhoedt, B.; Botteldooren, D.; Steenhaut, K.; et al. Towards an environmental measurement cloud: delivering pollution awareness to the public. Int. J. Distrib. Sens. Netw. 2014, 10. [Google Scholar] [CrossRef]
- Mydlarz, C.; Salamon, J.; Bello, J.P. The implementation of low-cost urban acoustic monitoring devices. Appl. Acoust. 2017, 117, 207–218. [Google Scholar] [CrossRef]
- Mietlicki, C.; Mietlicki, F.; Ribeiro, C.; Gaudibert, P.; Vincent, B. The HARMONICA project, new tools to assess environmental noise and better inform the public. In Proceedings of the Forum Acusticum Conference, Krakow, Poland, 7–12 September 2014. [Google Scholar]
- Nencini, L. DYNAMAP monitoring network hardware development. In Proceedings of the 22nd International Congress on Sound and Vibration, Florence, Italy, 12–16 July 2015; pp. 12–16. [Google Scholar]
- Bellucci, P.; Peruzzi, L.; Zambon, G. LIFE DYNAMAP project: The case study of Rome. Appl. Acoust. 2017, 117, 193–206. [Google Scholar] [CrossRef]
- Zambon, G.; Benocci, R.; Bisceglie, A.; Roman, H.E.; Bellucci, P. The LIFE DYNAMAP project: Towards a procedure for dynamic noise mapping in urban areas. Appl. Acoust. 2016, 124, 52–60. [Google Scholar] [CrossRef]
- Cooley, J.; Tukey, J. An algorithm for the machine calculation of complex Fourier series. Math. Comput. 1965, 19, 297–301. [Google Scholar] [CrossRef]
- Can, A.; Leclercq, L.; Lelong, J.; Botteldooren, D. Traffic noise spectrum analysis: Dynamic modeling vs. experimental observations. Appl. Acoust. 2010, 71, 764–770. [Google Scholar] [CrossRef]
- Kurze, U. Frequency curves of road traffic noise. J. Sound Vib. 1974, 33, 171–185. [Google Scholar] [CrossRef]
- Blackman, R.B.; Tukey, J.W. Particular pairs of windows. In The Measurement of Power Spectra, from the Point of View of Communications Engineering; Nokia Bell Labs: Murray Hill, NJ, USA, 1958; pp. 95–101. [Google Scholar]
- Furui, S. Cepstral analysis technique for automatic speaker verification. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 254–272. [Google Scholar] [CrossRef]
- Alías, F.; Socoró, J.C. Description of Anomalous Noise Events for Reliable Dynamic Traffic Noise Mapping in Real-Life Urban and Suburban Soundscapes. Appl. Sci. 2017, 7, 146. [Google Scholar] [CrossRef]
- Valero, X.; Alías, F. Gammatone Cepstral Coefficients: Biologically Inspired Features for Non-Speech Audio Classification. IEEE Trans. Multimed. 2012, 14, 1684–1689. [Google Scholar] [CrossRef]
- Nussbaumer, H.J. Fast Fourier Transform and Convolution Algorithms; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 2. [Google Scholar]
- Evaluating Arduino and Due ADCs. Available online: http://www.djerickson.com/arduino/due_adc.html (accessed on 21 February 2018).
- Accelerating Fourier Transforms Using the GPU. Available online: https://www.raspberrypi.org/blog/accelerating-fourier-transforms-using-the-gpu/ (accessed on 21 February 2018).
- LPC Microcontrollers—NXP. Available online: https://www.nxp.com/products/processors-and-microcontrollers/arm-based-processors-and-mcus/lpc-cortex-m-mcus:LPC-ARM-CORTEX-M-MCUS (accessed on 21 February 2018).
- STM32 ARM Cortex Microcontrollers—32-bit MCUs—STMicroelectronics. Available online: http://www.st.com/en/microcontrollers/stm32-32-bit-arm-cortex-mcus.html (accessed on 21 February 2018).
- LogiCORE IP—Fast Fourier Transform v7.1. Available online: https://www.xilinx.com/support/documentation/ip_documentation/xfft_ds260.pdf (accessed on 21 February 2018).
- Digilent—Arty Reference Manual. Available online: https://reference.digilentinc.com/reference/programmable-logic/arty/reference-manual (accessed on 21 February 2018).
- Mesaros, A.; Heittola, T.; Virtanen, T. Metrics for Polyphonic Sound Event Detection. Appl. Sci. 2016, 6, 162. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # of Subband | Freq. (Hz) | # of Subband | Freq. (Hz) | # of Subband | Freq. (Hz) | # of Subband | Freq. (Hz) |
|---|---|---|---|---|---|---|---|
| 1 | 86.7 | 13 | 886.7 | 25 | 2484.6 | 37 | 7231.5 |
| 2 | 153.3 | 14 | 953.3 | 26 | 2715.9 | 38 | 7904.8 |
| 3 | 220 | 15 | 1020 | 27 | 2968.8 | 39 | 8640.9 |
| 4 | 286.7 | 16 | 1115 | 28 | 3242.2 | 40 | 9445.4 |
| 5 | 353.3 | 17 | 1218.8 | 29 | 3547.4 | 41 | 10,324.9 |
| 6 | 420 | 18 | 1332.3 | 30 | 3877.7 | 42 | 11,286.3 |
| 7 | 486.7 | 19 | 1456.3 | 31 | 4238.7 | 43 | 12,337.2 |
| 8 | 553.3 | 20 | 1591.9 | 32 | 4633.4 | 44 | 13,485.9 |
| 9 | 620 | 21 | 1740.2 | 33 | 5064.9 | 45 | 14,741.6 |
| 10 | 686.7 | 22 | 1902.2 | 34 | 5536.5 | 46 | 16,114.3 |
| 11 | 753.3 | 23 | 2079.3 | 35 | 6052 | 47 | 17,614.7 |
| 12 | 820 | 24 | 2272.9 | 36 | 6615.5 | 48 | 19,254.8 |
| Additions | Multiplications | Floating Point Operations | |
|---|---|---|---|
| Windowing | 0 | N | N |
| FFT | |||
| Subband filtering | C |
| Hardware Platform | Base Price | Supported ANED Version |
|---|---|---|
| Arduino Uno R3 | from $20 | None |
| Raspberry Pi Model A+ | from $20 | ANED Lo-Cap |
| NXP Semiconductor FRDM-K66F Freedom Board | from $69 | ANED Lo-Cap & Hi-Cap |
| Arty S7: Spartan-7 FPGA | from $109 | ANED Lo-Cap & Hi-Cap |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsina-Pagès, R.M.; Alías, F.; Socoró, J.C.; Orga, F. Detection of Anomalous Noise Events on Low-Capacity Acoustic Nodes for Dynamic Road Traffic Noise Mapping within an Hybrid WASN. Sensors 2018, 18, 1272. https://doi.org/10.3390/s18041272
Alsina-Pagès RM, Alías F, Socoró JC, Orga F. Detection of Anomalous Noise Events on Low-Capacity Acoustic Nodes for Dynamic Road Traffic Noise Mapping within an Hybrid WASN. Sensors. 2018; 18(4):1272. https://doi.org/10.3390/s18041272
Chicago/Turabian StyleAlsina-Pagès, Rosa Ma, Francesc Alías, Joan Claudi Socoró, and Ferran Orga. 2018. "Detection of Anomalous Noise Events on Low-Capacity Acoustic Nodes for Dynamic Road Traffic Noise Mapping within an Hybrid WASN" Sensors 18, no. 4: 1272. https://doi.org/10.3390/s18041272
APA StyleAlsina-Pagès, R. M., Alías, F., Socoró, J. C., & Orga, F. (2018). Detection of Anomalous Noise Events on Low-Capacity Acoustic Nodes for Dynamic Road Traffic Noise Mapping within an Hybrid WASN. Sensors, 18(4), 1272. https://doi.org/10.3390/s18041272