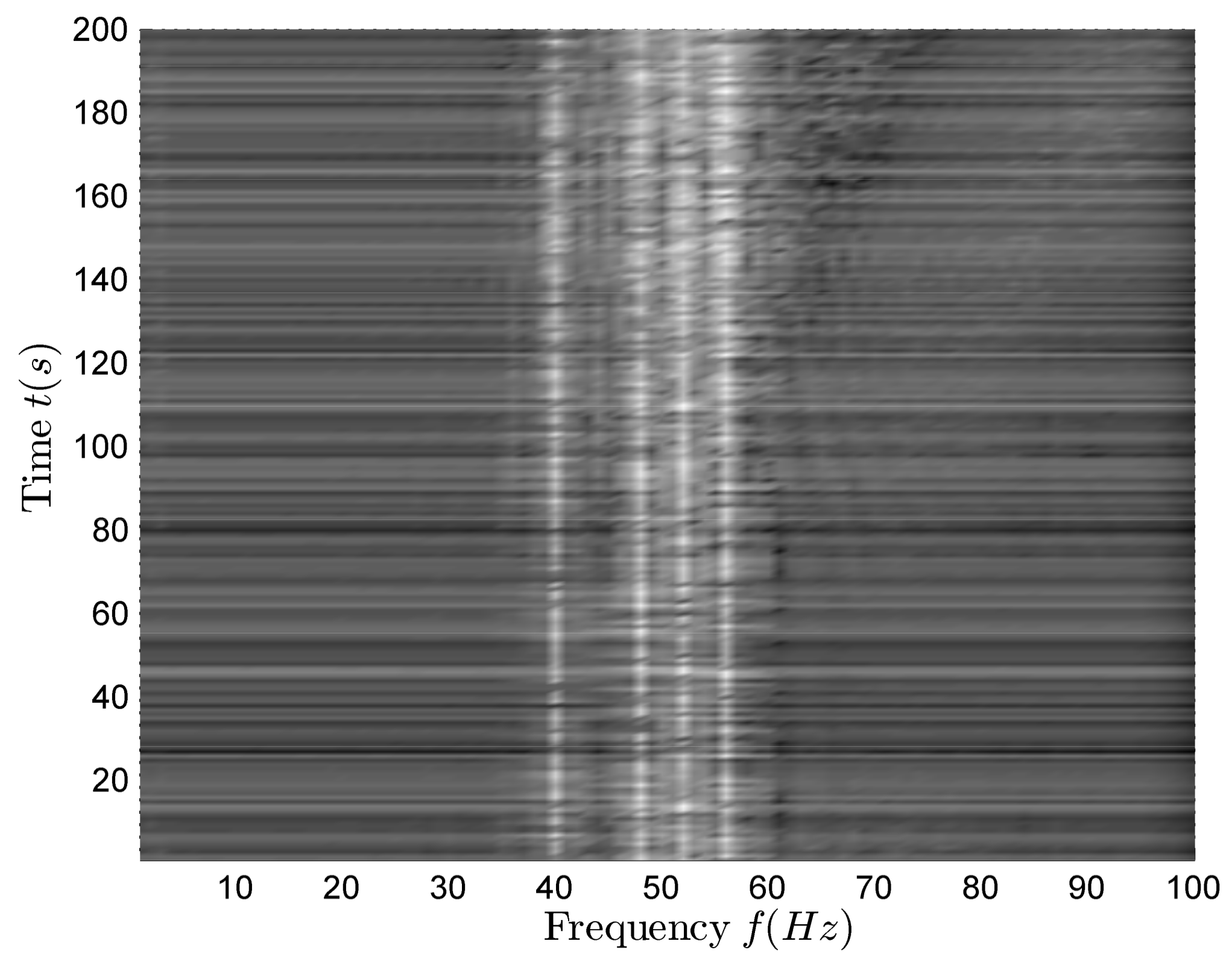
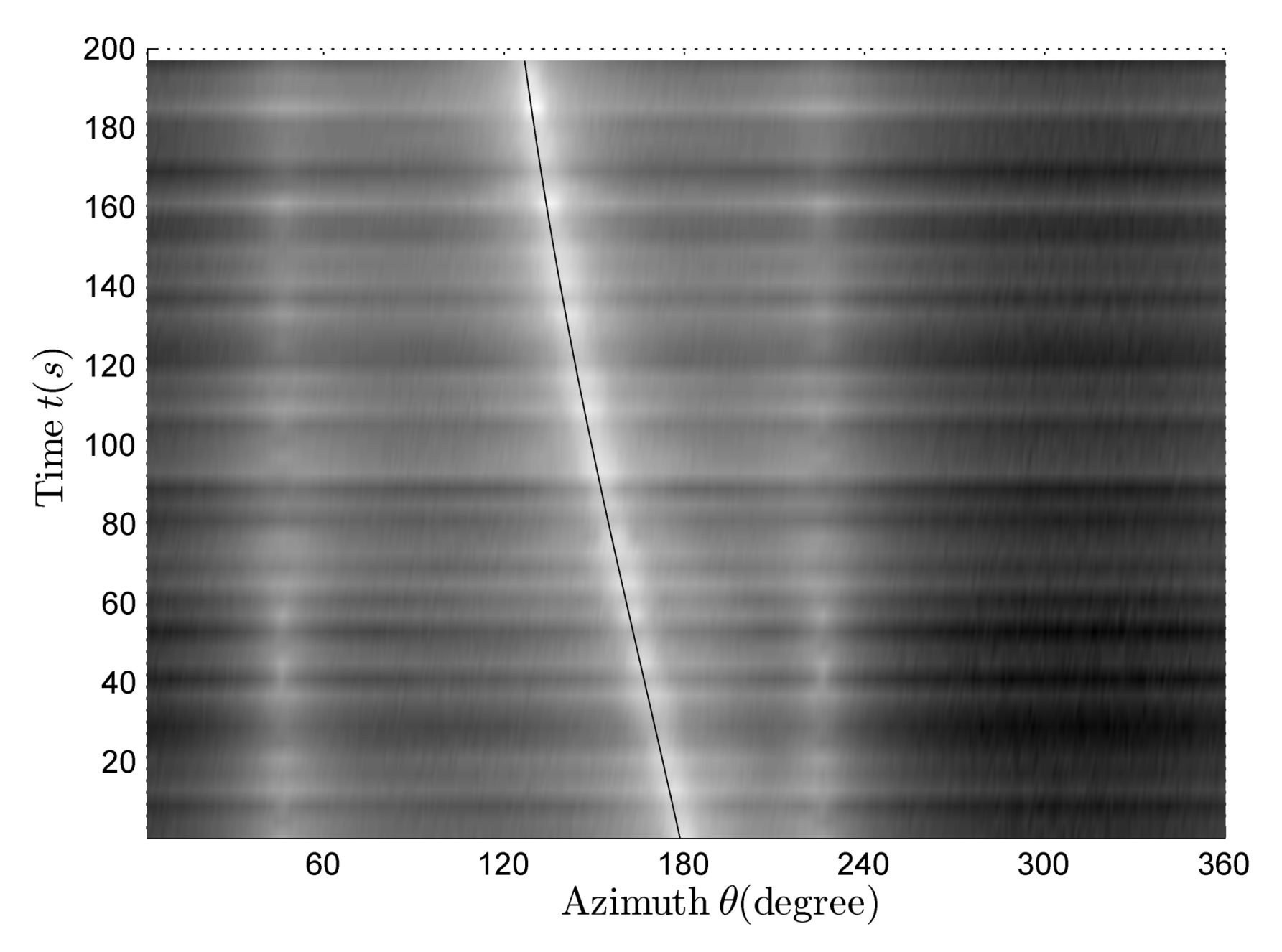
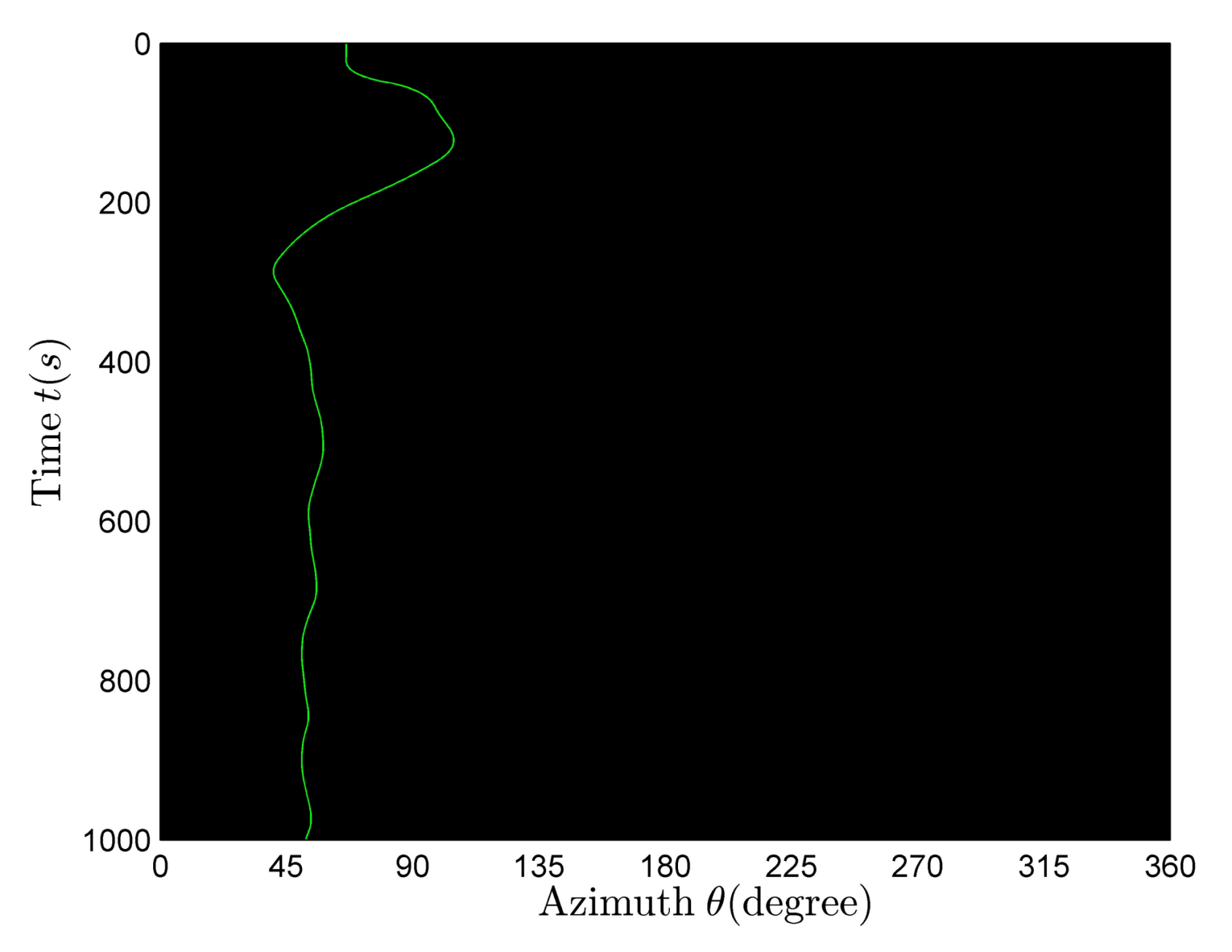
This paper mainly aims to distinguish the single-target case and the multi-target case, so as to realize the target number resolution. The single-target multi-line spectrum and multi-target multi-line spectrum cases cannot be differentiated by time–frequency distribution, because there are many line spectrums on the time–frequency distribution in both cases, so that we cannot tell whether the case is single-target or multi-target. In this paper, we mainly make use of the azimuth information contained in the received signal to distinguish the single-target and multi-target cases. There is only one curve for the azimuth variant in the bearing-time recording of the single-target multi-line spectrum case, but there are multiple curves for the azimuth variant in the bearing-time recording of the multi-target multi-line spectrum case. Ideally, the number of curves for the azimuth variant is consistent with the target number. The so-called ideal case is that each curve for azimuth variant can be clearly identified.
2.3.1. Azimuth-Estimation Method
The vector sensor is the sensor used in the underwater vector field measurement, which is the combination of pressure sensor and velocity sensor (pressure gradient sensor, accelerometer, displacement meter, etc.) [
41]. The vector sensor outputs the pressure signal
and velocity signal
which contains three orthogonal components
.
and
, in which
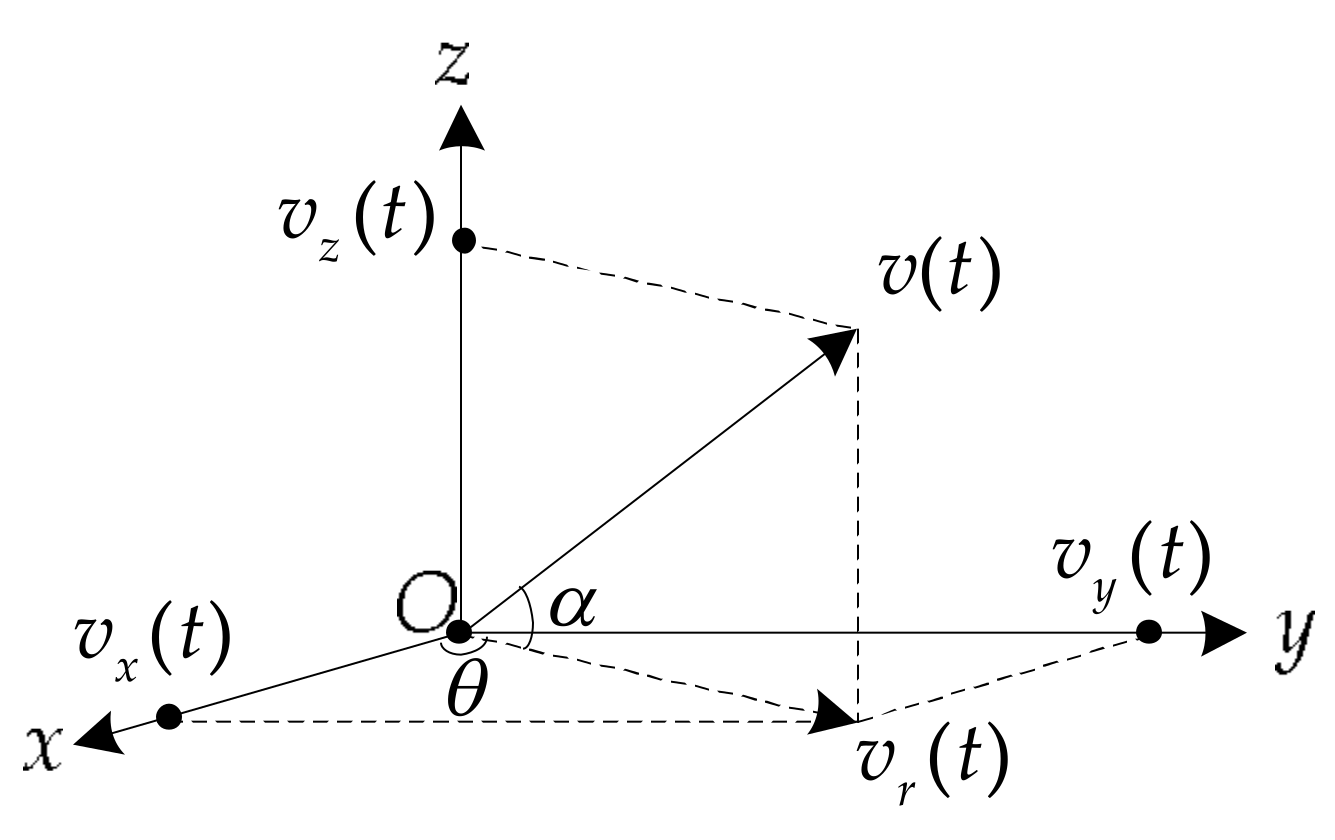
is the target signal. The geometric relationship between the orthogonal components is shown in
Figure 1.
is the horizontal azimuth angle (range:
), the x-axis positive direction is
,
is the elevation angle (range:
), and the horizontal plane (
xoy plane) is
[
42].
The expression of the aerial target-radiated noise refraction signal received by the sensor is: . , , , are the pressure and velocity signals received by the vector sensor, are the isotropic noise components of pressure and velocity received by the vector sensor, and they are all independent of . is the refraction coefficient, which meets: . and are the angles between the incident, refraction ray of the direct refraction wave and the target motion direction respectively.
The physical basis of complex acoustic intensity’s anti-interference performance is the correlation between pressure and velocity, whereas the pressure and velocity of isotropic environment interference are irrelevant or weakly correlated. The average output of complex acoustic intensity is:
represents sliding-average periodgram operation. “*” represents complex conjugate,
represents the complex modulus calculation operation, and
are the Fourier transform of the pressure and velocity respectively,
is the Fourier transform of the signal
, and
is the Fourier transform of the interference with the small quantity.
In the underwater acoustic channel, the acoustic Ohm law is approximately satisfied. Therefore, the pressure signal has the same phase as the velocity signal. According to the basic properties of the Fourier transform, the energy of the two signals in the same phase is concentrated on the real component of the cross spectrum. The imaginary component of the cross spectrum only contains the energy of interference and noise [
42,
43].
The cross spectrum method at a single frequency point is given by:
represents the operation of obtaining the real component.
In this paper, we use the weighted bar graph method to do the statistical analysis of the azimuth-estimation results. The specific algorithm of the weighted bar graph method is given by:
is the azimuth sequence in the angle domain;
represents the getting integer operation towards positive infinity;
represents the modulus operation;
is the azimuth-estimation value at every frequency point;
k is the sequence number of the frequency point;
M is the total number of frequency points used in the azimuth estimation;
is the complex acoustic intensity of the
k-th frequency point; and
Z is an array whose dimension is 1 × 360. We use the array
Z to do the weighted statistic of the azimuth sequence
. The complex acoustic intensity
, used for summation in (23), meets
.
n is an angle sequence that varies from 1° to 360°.
Using the azimuth-estimation method based on (20), we can calculate the azimuth value at every frequency point. Then, we use the weighted bar graph method to do a statistical analysis of the azimuth-estimation result at every frequency point, so as to get the probability distribution of the azimuth estimation at a certain time. The azimuth corresponding to the maximum value of the probability distribution is the desired target azimuth [
40].
2.3.2. Improved Azimuth-Estimation Method
The azimuth-estimation method described in
Section 2.3.1 is effective in single-target cases and the azimuth-estimation accuracy is limited in multi-target cases, because signals radiated by multiple targets are superimposed together. In the azimuth-estimation process, a certain estimated target signal is disturbed by all the other target radiated signals, so that the azimuth-estimation effect in the whole frequency band is not very satisfactory. Aiming at the requirement of azimuth estimation in multi-target cases, the azimuth-estimation algorithm described in
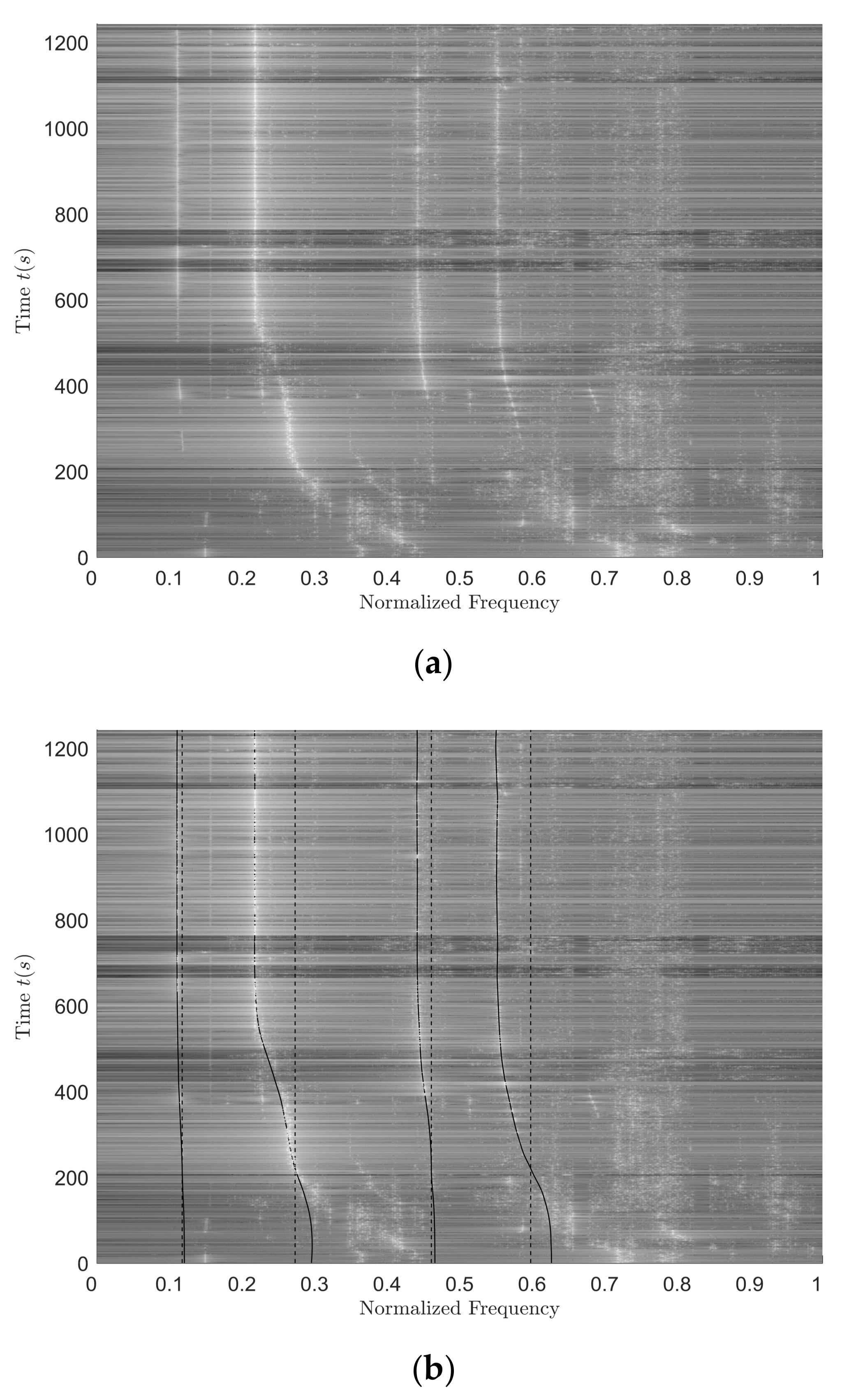
Section 2.3.1 is improved in this section. The improved azimuth-estimation method can still obtain the ideal azimuth-estimation results in multi-target cases. The difference between the improved and original azimuth-estimation method lies in the fact that in the multi-target cases, the azimuth estimation is not performed in the whole frequency band, but carried out at the frequency where the target signal has the highest line spectrum intensity after the frequency estimation based on the target time–frequency distribution.
In addition, in the case of multi-target, some target signals are stronger and some target signals are weaker. Assuming that the first target signal is strongest, the azimuth-estimation effect of the remaining targets may still be poor based on the improved azimuth-estimation method, because the remaining target signals are weaker signals relative to the first target signal. Ideally, the signal of the first target should not affect the azimuth estimation of other target-radiated signals. The azimuth-estimation results of other targets should not be within the range of the first target azimuth-estimation value . However, in practice, the strong signal will have a great influence on the azimuth estimation of the weak signals, resulting in the azimuth-estimation results of the strong signals being contained in the azimuth-estimation results of the weak signals. To eliminate the influence of strong signals on weak signals, we add the threshold control. The threshold (that is, the permissible error of the azimuth estimation) is . The specific steps of the added algorithm about the threshold control are as follows:
- Step 1:
Arrange the multiple target signals in descending order according to the line spectrum intensity of each signal;
- Step 2:
First, estimate the azimuth of the first target (namely, the target signal whose line spectrum intensity is strongest), and then obtain the final azimuth-estimation value after the statistical analysis, and the values in the range of the final azimuth-estimation value are considered as the azimuth-estimation results of the first target;
- Step 3:
When estimating the azimuth of the i-th target, the estimation results within the range at (i−1)-th target azimuth-estimation value should be cleared before the statistical analysis. i represents the serial number of the target, , is the number of targets.
- Step 4:
Keep looping Step 3 until you have completed the azimuth estimation of all targets.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}