Transient Characteristics of a Fluidic Device for Circulatory Jet Flow


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Design and Numerical Simulation
3. Experimental Setup
4. Experimental Results and Discussion
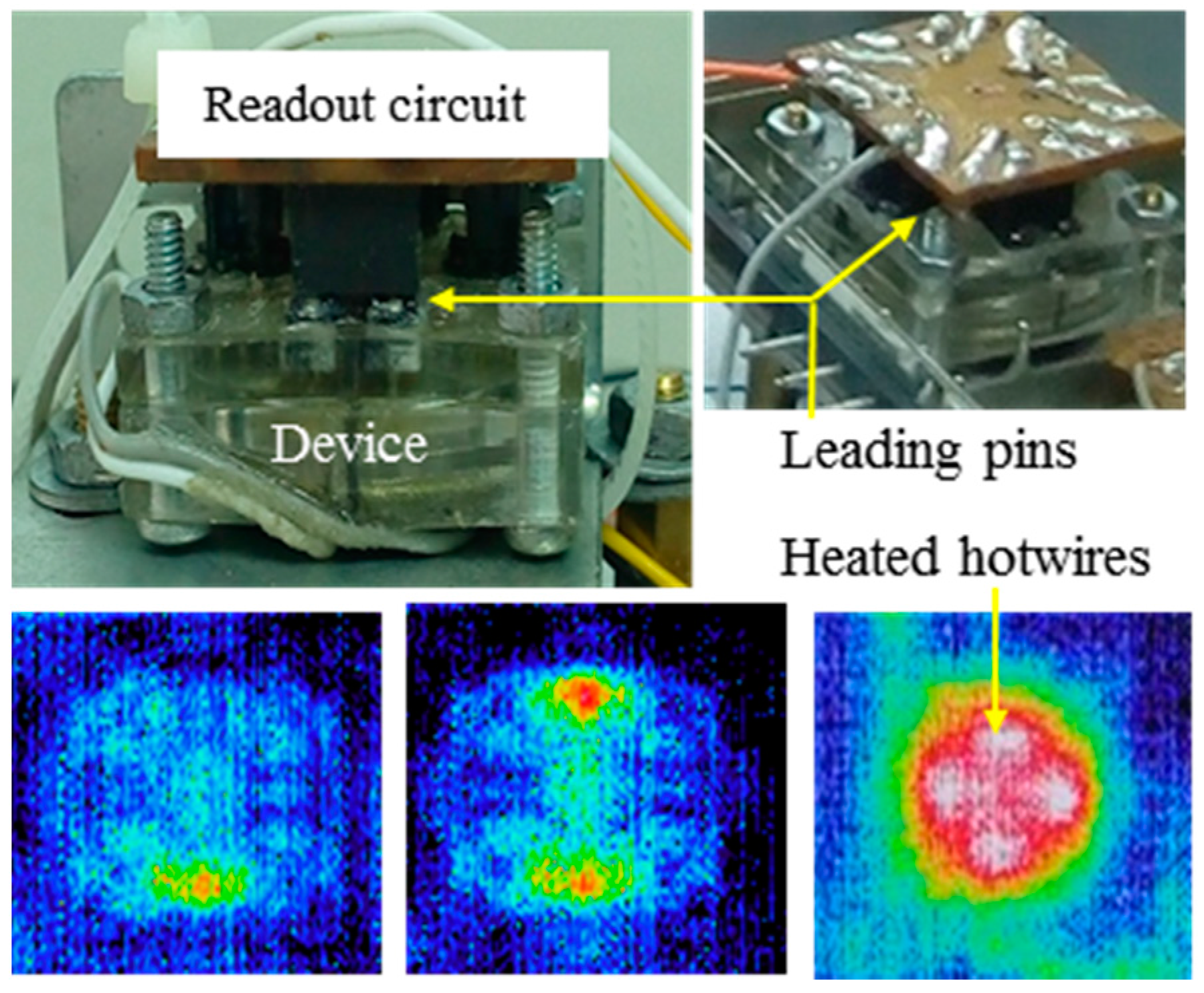
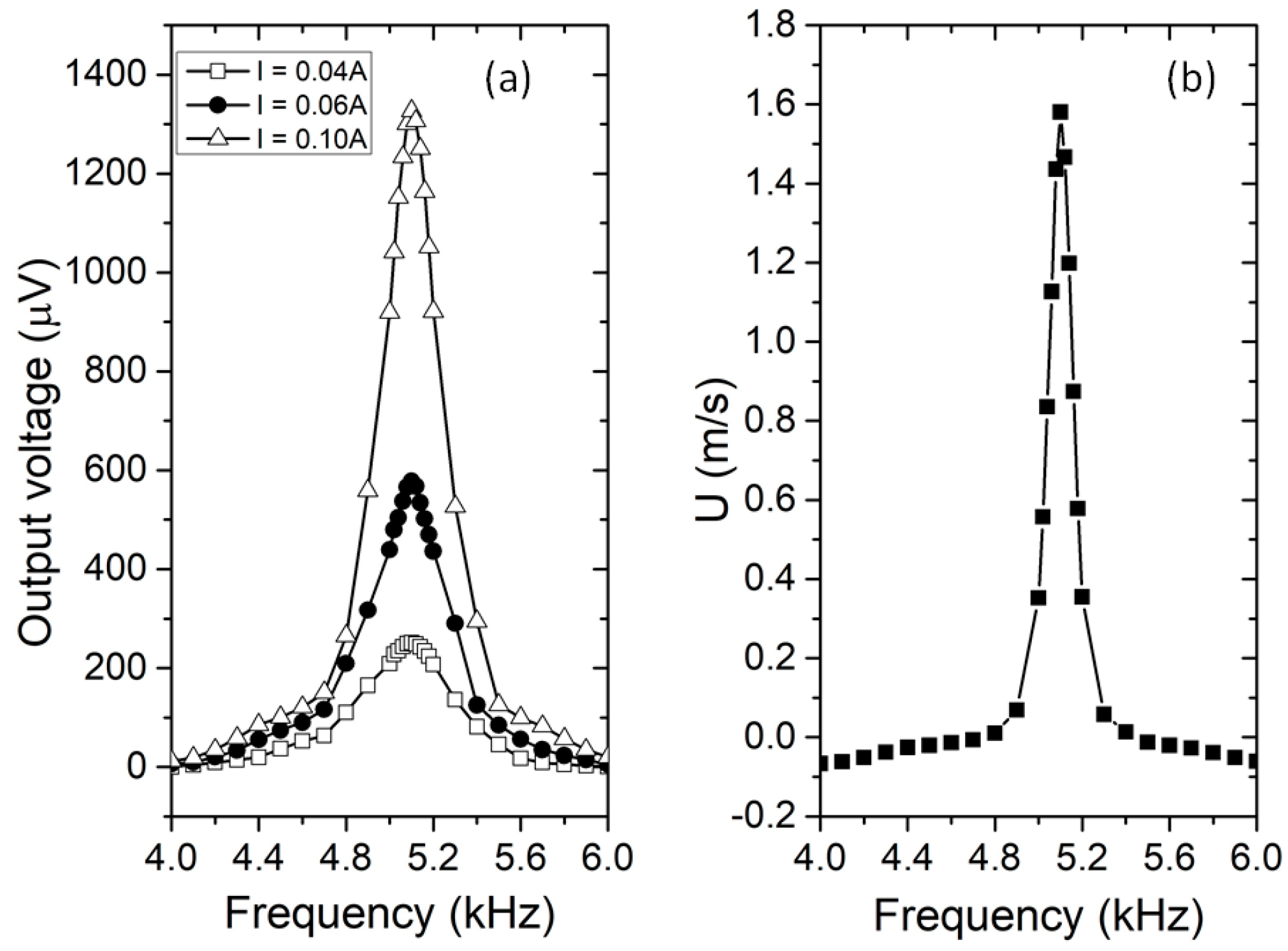
4.1. Pumping Performance Confirmed by Hotwire Anemometry
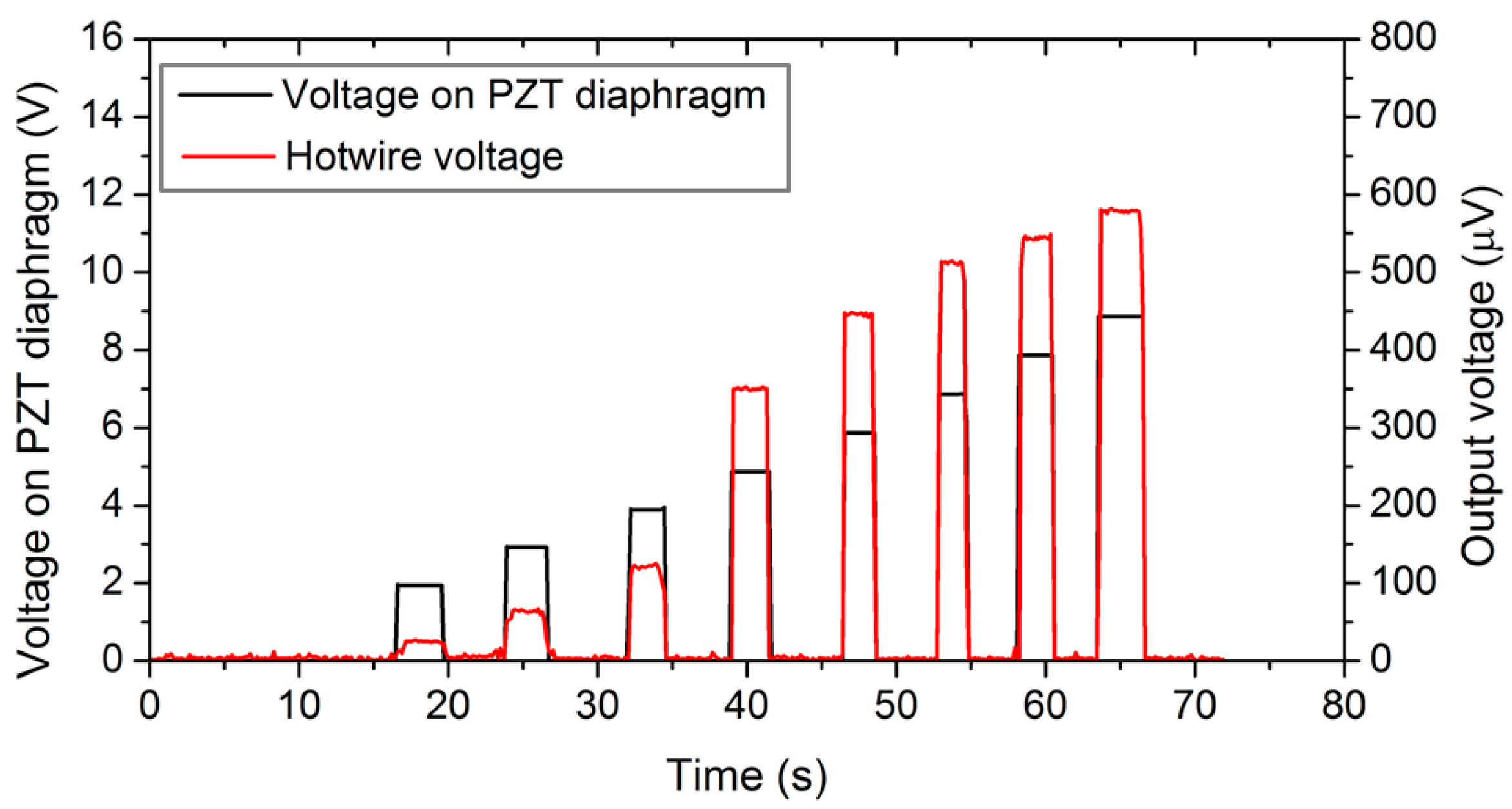
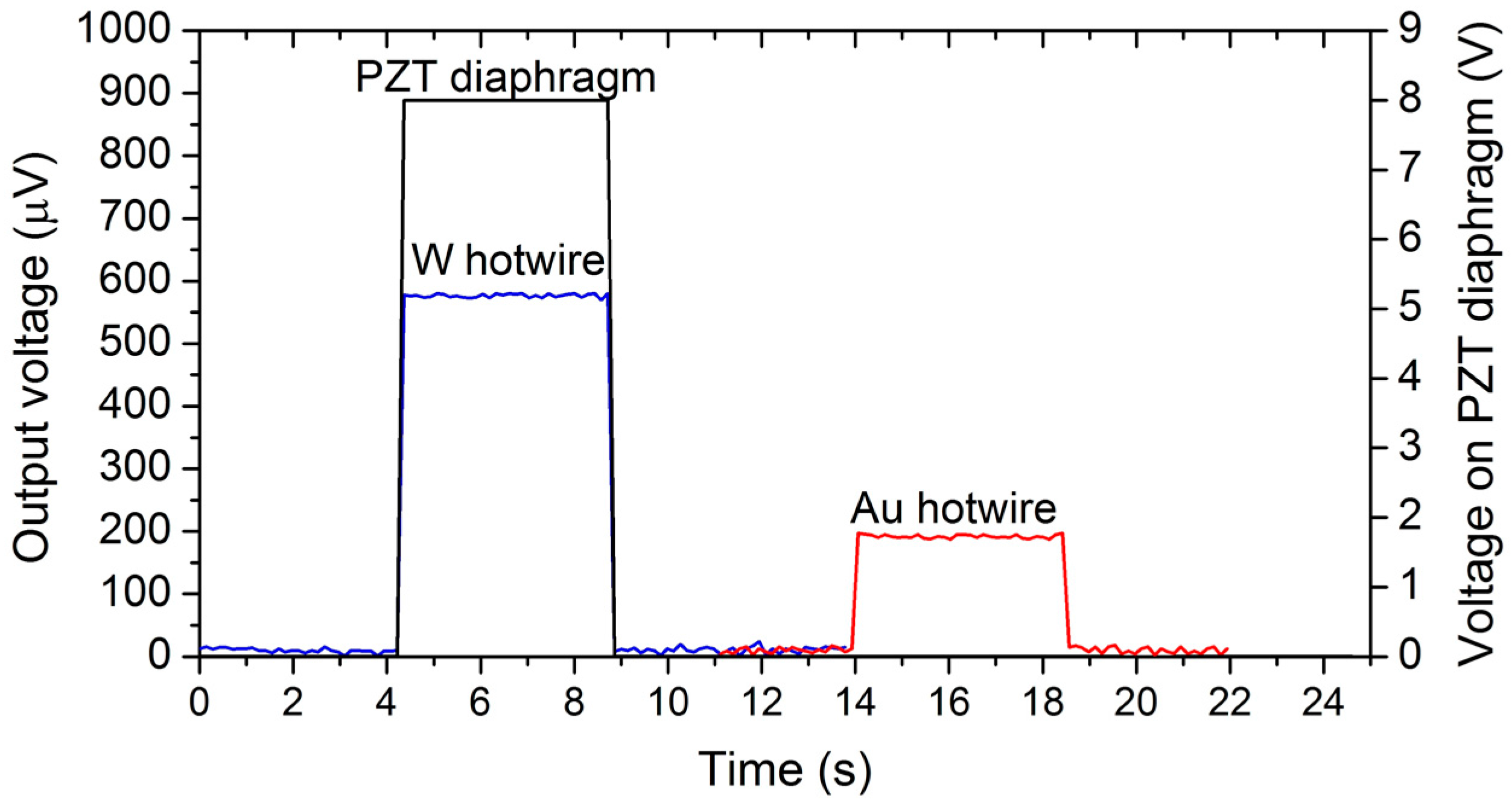
4.2. Transient Characteristic of Flow
4.3. Application in Inertial Sensing
5. Concluding Remarks
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ohira, S.-I.; Toda, K. Miniature liquid flow sensor and feedback control of electroosmotic and pneumatic flows for a micro gas analysis system. Anal. Sci. 2006, 22, 61–65. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; van der Steen, G.; van Dedem, G.W.K.; van der Wielen, L.A.M.; van Leeuwen, M.; van Gulik, W.M.; Heijnen, J.J.; Krommenhoek, E.E.; Gardeniers, J.G.E.; van den Berg, A.; Ottens, M. Improving mixing in microbioreactors. Chem. Eng. Sci. 2008, 63, 3036–3046. [Google Scholar] [CrossRef]
- Sudarsan, A.P.; Ugaz, V.M. Fluid mixing in planar spiral microchannels. Lab Chip 2006, 6, 74–82. [Google Scholar] [CrossRef] [PubMed]
- Dorfman, K.D.; Chabert, M.; Codarbox, J.-H.; Rousseau, G.; de Cremoux, P.; Viovy, J.-L. Contamination-free continuous flow microfluidic polymerase chain reaction for quantitative and clinical applications. Anal. Chem. 2005, 77, 3700–3704. [Google Scholar] [CrossRef] [PubMed]
- Studer, V.; Pepin, A.; Chen, Y.; Ajdari, A. An integrated AC electrokinetic pump in a microfluidic loop for fast and tunable flow control. Analyst 2004, 129, 944–949. [Google Scholar] [CrossRef] [PubMed]
- Meyer, L.; Dasgupta, S.; Shaddock, D.; Tucker, J.; Fillion, R.; Bronecke, P.; Yorinks, L.; Kraft, P. A silicon-carbide micro-capillary pumped loop for cooling high power devices. In Proceedings of the 19th Annual IEEE Semiconductor Thermal Measurement and Management Symposium, San Jose, CA, USA, 11–13 March 2003; pp. 364–368. [Google Scholar]
- Dau, V.T.; Dao, D.V.; Shiozawa, T.; Kumagai, H.; Sugiyama, S. A Single-Axis Thermal Convective Gas Gyroscope. Sens. Mater. 2005, 17, 453–463. [Google Scholar]
- Dau, V.T.; Otake, T.; Dinh, T.X.; Dao, D.V.; Sugiyama, S. A multi axis fluidic inertial sensor. In Proceedings of the IEEE Sensors, Lecce, Italy, 26–29 October 2008; Volume 1, pp. 666–669. [Google Scholar]
- Dao, D.V.; Okada, S.; Dau, V.; Toriyama, T.; Sugiyama, S. Development of a 3-DOF silicon piezoresistive micro accelerometer. In Proceedings of the Micro-Nanomechatronics and Human Science, 2004 and The Fourth Symposium Micro-Nanomechatronics for Information-Based Society, Nagoya, Japan, 31 October–3 November 2004; pp. 1–6. [Google Scholar]
- Dau, V.T.; Dinh, T.X.; Sugiyama, S. A MEMS-based silicon micropump with intersecting channels and integrated hotwires. J. Micromech. Microeng. 2009, 19, 125016. [Google Scholar] [CrossRef]
- Dau, V.T.; Dao, D.V.; Dinh, T.X.; Shiozawa, T.; Sugiyama, S. Optimization of PZT Diaphragm Pump for the Convective Gyroscope. IEEJ Trans. Sens. Micromach. 2007, 127, 347–352. [Google Scholar] [CrossRef][Green Version]
- Mori, K.; Yamamoto, H.; Takemura, K.; Yokota, S.; Edamura, K. Dominant factors inducing electro-conjugate fluid flow. Sens. Actuators A Phys. 2011, 167, 84–90. [Google Scholar] [CrossRef]
- Takemura, K.; Yokota, S.; Suzuki, M.; Edamura, K.; Kumagai, H.; Imamura, T. A liquid rate gyroscope using electro-conjugate fluid. Sens. Actuators A Phys. 2009, 149, 173–179. [Google Scholar] [CrossRef]
- Ogawa, Y.; Yokota, S.; Edamura, K.; Takemura, K. A Dual-Axis Liquid Micro Rate Gyroscope Using an Electro-Conjugate Fluid. Trans. Jpn. Soc. Mech. Eng. Part C 2011, 77, 204–211. [Google Scholar] [CrossRef]
- Mikheyev, M. Fundamentals of Heat Transfer; Peace Publisher: Moscow, Russia, 1968. [Google Scholar]
- Dau, V.T.; Dao, D.V.; Sugiyama, S. A 2-DOF convective micro accelerometer with a low thermal stress sensing element. Smart Mater. Struct. 2007, 16, 2308–2314. [Google Scholar] [CrossRef]
- Dao, R.; Morgan, D.E.; Kries, H.H.; Bachelder, D.M. Convective Accelerometer and Inclinometer. U.S. Patent 5581034A, 3 December 1996. [Google Scholar]
- Zhu, R.; Ding, H.; Su, Y.; Yang, Y. Modeling and experimental study on characterization of micromachined thermal gas inertial sensors. Sensors 2010, 10, 8304–8315. [Google Scholar] [CrossRef] [PubMed]
- Dau, V.T.; Dao, D.V.; Hayashida, M.; Dinh, T.X.; Sugiyama, S. A Dual Axis Accelerometer Utilizing Low Doped Silicon Thermistor. IEEJ Trans. Sens. Micromach. 2006, 126, 190–194. [Google Scholar] [CrossRef][Green Version]
- Dau, V.T.; Otake, T.; Dinh, T.X.; Sugiyama, S. Design and fabrication of convective inertial sensor consisting of 3DOF gyroscope and 2DOF accelerometer. In Proceedings of the TRANSDUCERS-2009 International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009; pp. 1170–1173. [Google Scholar]
- Bahari, J.; Feng, R.; Leung, A.M. Robust MEMS Gyroscope Based on Thermal Principles. J. Microelectromech. Syst. 2014, 23, 100–116. [Google Scholar] [CrossRef]
- Feng, R.; Bahari, J.; Jones, J.D.; Leung, A.M. MEMS thermal gyroscope with self-compensation of the linear acceleration effect. Sens. Actuators A Phys. 2013, 203, 413–420. [Google Scholar] [CrossRef]
- Cai, S.L.; Zhu, R.; Ding, H.G.; Yang, Y.J.; Su, Y. A micromachined integrated gyroscope and accelerometer based on gas thermal expansion. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems, Barcelona, Spain, 16–20 June 2013; pp. 50–53. [Google Scholar]
- Zhu, R.; Cai, S.; Ding, H.; Yang, Y.J.; Su, Y. A micromachined gas inertial sensor based on thermal expansion. Sens. Actuators A Phys. 2014, 212, 173–180. [Google Scholar] [CrossRef]
- Dauphinee, T.M. Acoustic Air Pump. Rev. Sci. Instrum. 1957, 28, 452. [Google Scholar] [CrossRef]
- Mednikov, E.P.; Novitskii, B.G. Experimental study of intense acoustic streaming. Akust. Zhurnal 1975, 21, 245–249. [Google Scholar]
- Trávníček, Z.; Tesař, V.; Wang, A.-B. Enhancement of synthetic jets by means of an integrated valve-less pump: Part II. Numerical and experimental studies. Sens. Actuators A Phys. 2005, 125, 50–58. [Google Scholar] [CrossRef]
- Trávníček, Z.; Fedorchenko, A.I.; Wang, A.-B. Enhancement of synthetic jets by means of an integrated valve-less pump. Sens. Actuators A Phys. 2005, 120, 232–240. [Google Scholar] [CrossRef]
- Chaudhari, M.; Puranik, B.; Agrawal, A. Multiple orifice synthetic jet for improvement in impingement heat transfer. Int. J. Heat Mass Transf. 2011, 54, 2056–2065. [Google Scholar] [CrossRef]
- Atencia, J.; Beebe, D.J. Capillary inserts in microcirculatory systems. Lab Chip 2006, 6, 575–577. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Chang, H.; Zhou, P.; Gong, X.; Xie, J.; Yuan, W. Development of a tri-axis vortex convective gyroscope with suspended silicon thermistors. In Proceedings of the 2013 IEEE SENSORS, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar]
- Chang, H.; Zhou, P.; Xie, Z.; Gong, X.; Yang, Y.; Yuan, W. Theoretical modeling for a six-DOF vortex inertial sensor and experimental verification. J. Microelectromech. Syst. 2013, 22, 1100–1108. [Google Scholar] [CrossRef]
- Dau, V.T.; Dao, D.V.; Shiozawa, T.; Kumagai, H.; Sugiyama, S. Development of a dual-axis thermal convective gas gyroscope. J. Micromech. Microeng. 2006, 16, 1301–1306. [Google Scholar] [CrossRef]
- Dau, V.T.; Dinh, T.X.; Dao, D.V.; Sugiyama, S. Design and Simulation of a Novel 3-DOF MEMS Convective Gyroscope. IEEJ Trans. Sens. Micromach. 2008, 128, 219–224. [Google Scholar] [CrossRef]
- Dinh, T.X.; Ogami, Y. A Principle to Generate Flow for Thermal Convective Base Sensors. J. Fluids Eng. 2009, 131, 41401. [Google Scholar] [CrossRef]
- Hoa, P.T.; Dinh, T.X.; Dau, V.T. Design Study of Multidirectional Jet Flow for a Triple-Axis Fluidic Gyroscope. IEEE Sens. J. 2015, 15, 4103–4113. [Google Scholar] [CrossRef]
- Dau, V.T.; Dinh, T.X.; Bui, T.T. Jet flow generation in a circulatory miniaturized system. Sens. Actuators B Chem. 2015, 223, 820–826. [Google Scholar] [CrossRef]
- Dau, V.T.; Dao, D.V.; Shiozawa, T.; Sugiyama, S. Simulation and Fabrication of a Convective Gyroscope. IEEE Sens. J. 2008, 8, 1530–1538. [Google Scholar] [CrossRef]
- Ai, Y.; Luo, X.; Liu, S. Design and modeling of micromachined thermal convective gyroscope with bidirectional jets. In Proceedings of the Electronic Packaging Technology Conference (EPTC), Shanghai, China, 14–17 August 2007; pp. 3–7. [Google Scholar]
- Kock, G.; Combette, P.; Chariot, B.; Giani, A.; Schneider, M.; Gauthier-Blum, C. Study and realization of a fluidic thermal gyrometer. In Proceedings of the 2017 Symposium on Design, Test, Integration and Packaging of MEMS/MOEMS (DTIP), Bordeaux, France, 29 May–1 June 2017; pp. 1–5. [Google Scholar]
- Dau, V.T.; Dinh, T.X. Numerical study and experimental validation of a valveless piezoelectric air blower for fluidic applications. Sens. Actuators B Chem. 2015, 221, 1077–1083. [Google Scholar] [CrossRef]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Manufacturing, L.M. Piezoelectric Diaphragms; Murata Manufacturing Co., Ltd.: Kyoto, Japan, 2016; Available online: http://www.murata.com/en-sg/products/sound/diaphragm (accessed on 9 March 2018).
- Mabuchi, I.; Tanaka, T. Experimental Study on Effect of Vibration on Natural Convective Heat Transfer from a Horizontal Fine Wire. Bull. JSME 1967, 10, 808–816. [Google Scholar] [CrossRef]
- Dau, V.T.; Dinh, T.X.; Bui, T.T.; Tran, C.D.; Phan, H.T.; Terebessy, T. Corona based air-flow using parallel discharge electrodes. Exp. Therm. Fluid Sci. 2016, 79, 52–56. [Google Scholar] [CrossRef]
- Dau, V.T.; Tran, C.D.; Bui, T.T.; Nguyen, V.D.X.; Dinh, T.X. Piezo-resistive and thermo-resistance effects of highly-aligned CNT based macrostructures. RSC Adv. 2016, 6, 106090–106095. [Google Scholar] [CrossRef]
- Dinh, T.X.; Lam, D.B.; Tran, C.-D.; Bui, T.T.; Pham, P.H.; Dau, V.T. Jet flow in a circulatory miniaturized system using ion wind. Mechatronics 2017, 47, 126–133. [Google Scholar] [CrossRef]
- Dau, V.T.; Dinh, T.X.; Terebessy, T.; Bui, T.T. Bipolar corona discharge based air flow generation with low net charge. Sens. Actuators A Phys. 2016, 244, 146–155. [Google Scholar] [CrossRef]
- Li, J. Hot-Wire Attenuation and Its Correction in Turbulence Measurements. In Proceedings of the 16th Australasian Fluid Mechanics Conference, Gold Coast, Australia, 3–7 December 2007; pp. 903–906. [Google Scholar]
- Li, J. Dynamic response of constant temperature hot-wire system in turbulence velocity measurements. Meas. Sci. Technol. 2004, 15, 1835–1847. [Google Scholar] [CrossRef]














© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, H.T.; Dinh, T.X.; Bui, P.N.; Dau, V.T. Transient Characteristics of a Fluidic Device for Circulatory Jet Flow. Sensors 2018, 18, 849. https://doi.org/10.3390/s18030849
Phan HT, Dinh TX, Bui PN, Dau VT. Transient Characteristics of a Fluidic Device for Circulatory Jet Flow. Sensors. 2018; 18(3):849. https://doi.org/10.3390/s18030849
Chicago/Turabian StylePhan, Hoa Thanh, Thien Xuan Dinh, Phong Nhu Bui, and Van Thanh Dau. 2018. "Transient Characteristics of a Fluidic Device for Circulatory Jet Flow" Sensors 18, no. 3: 849. https://doi.org/10.3390/s18030849
APA StylePhan, H. T., Dinh, T. X., Bui, P. N., & Dau, V. T. (2018). Transient Characteristics of a Fluidic Device for Circulatory Jet Flow. Sensors, 18(3), 849. https://doi.org/10.3390/s18030849