High-Precision Phenotyping of Grape Bunch Architecture Using Fast 3D Sensor and Automation

Abstract
:1. Introduction
2. Materials and Methods
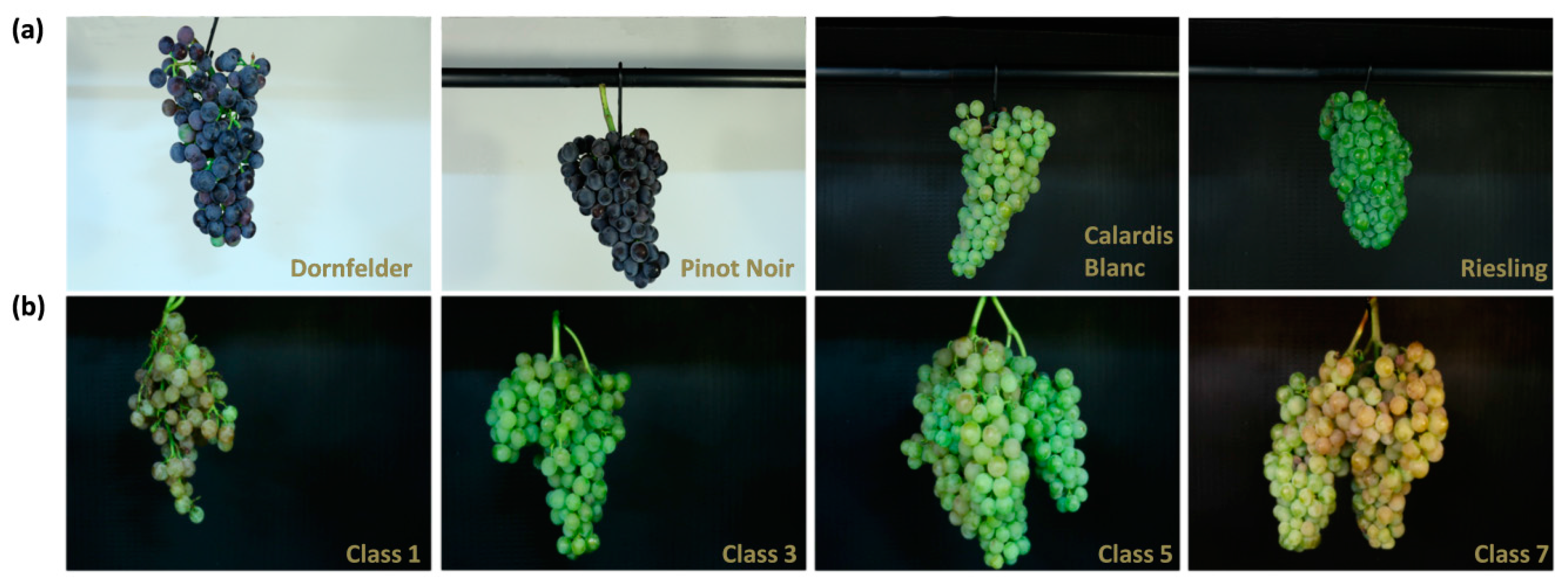
2.1. Sensor and Plant Material
2.2. 3D Data Acquisition
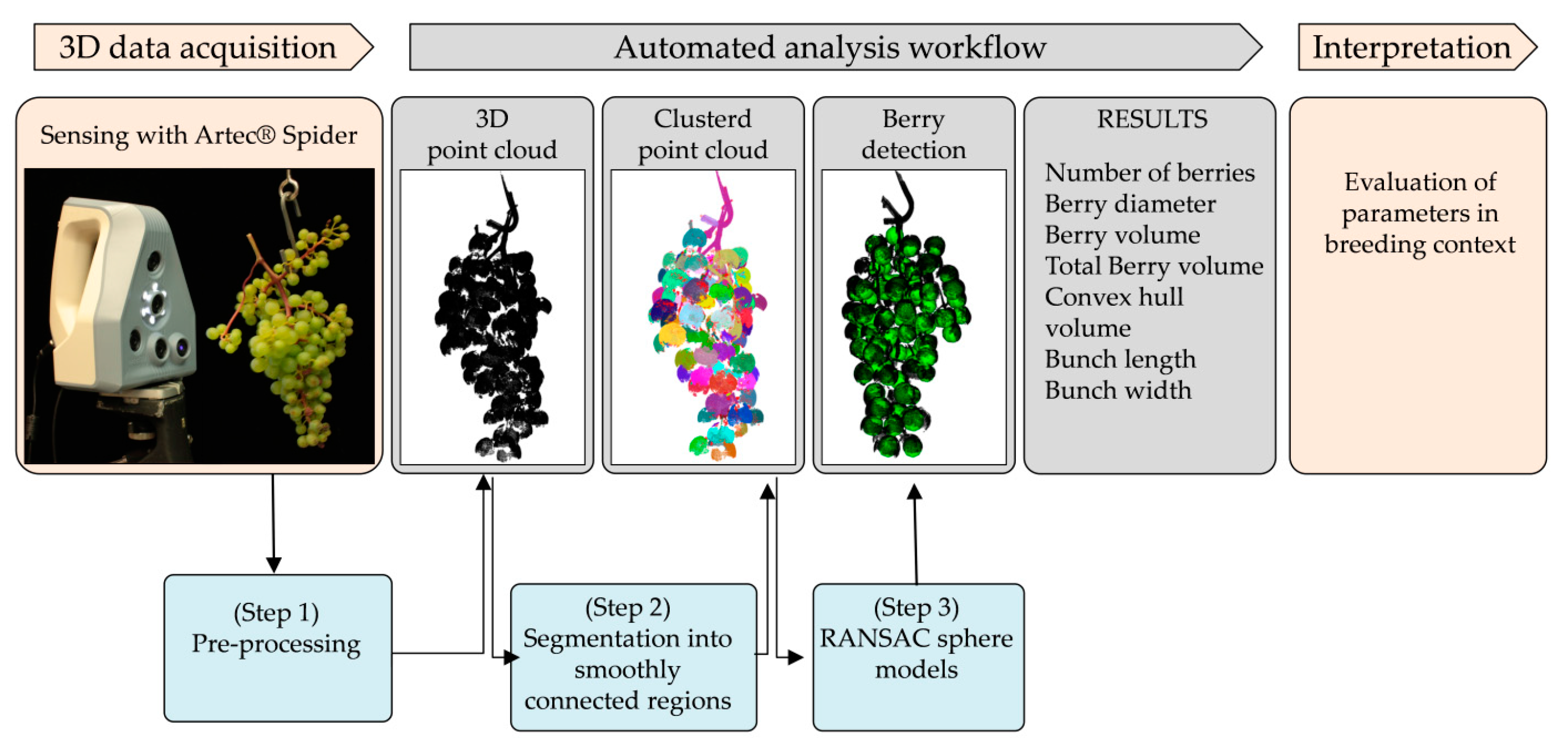
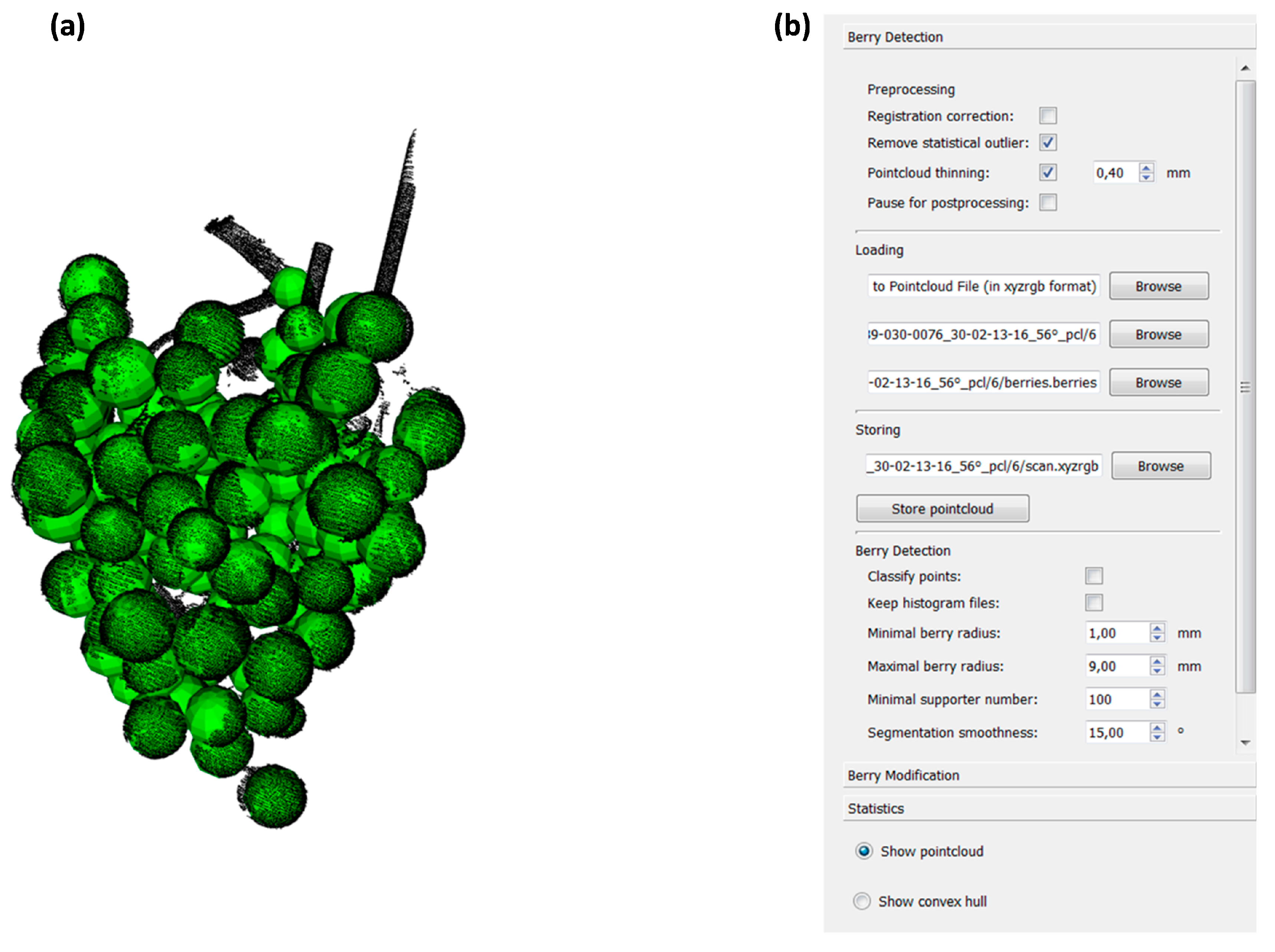
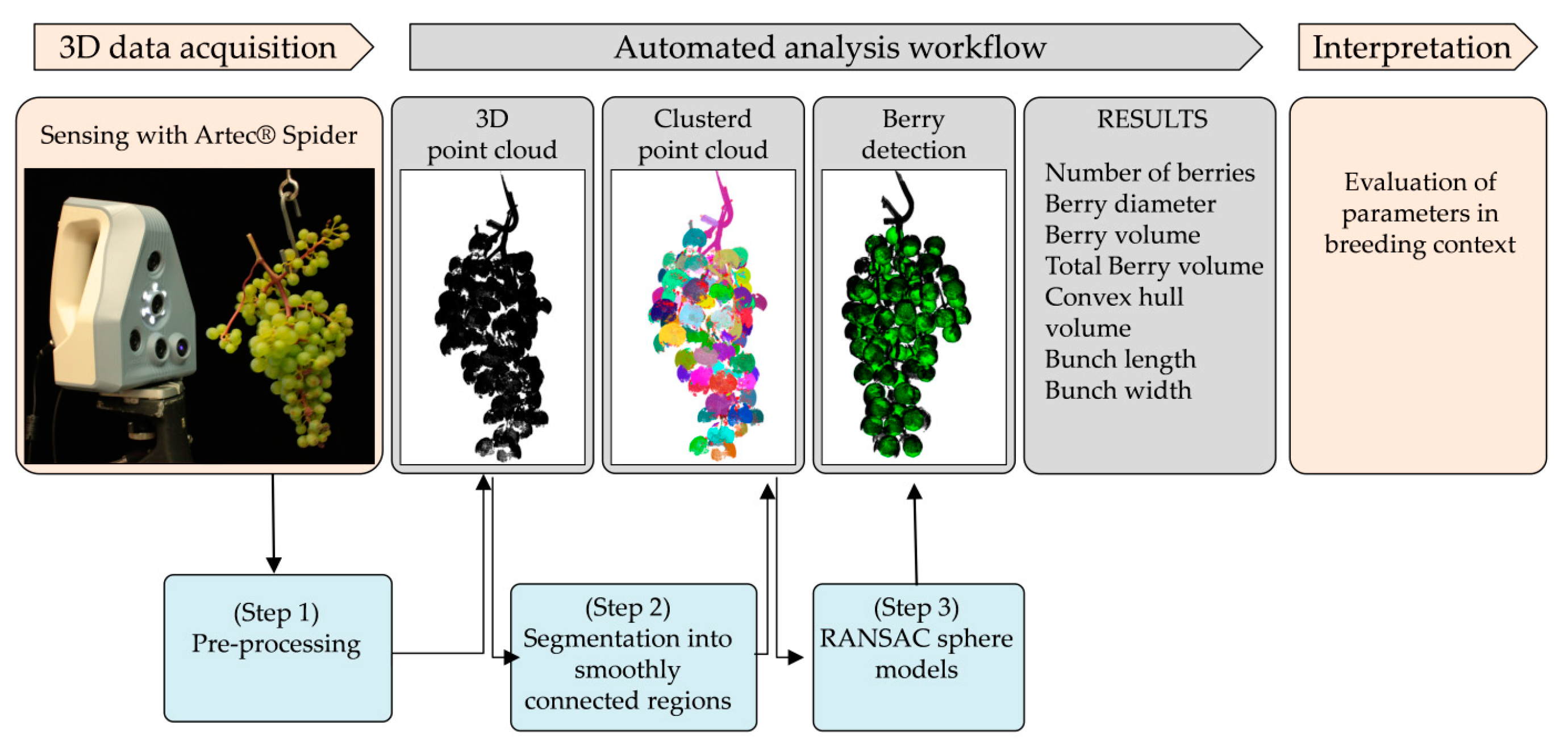
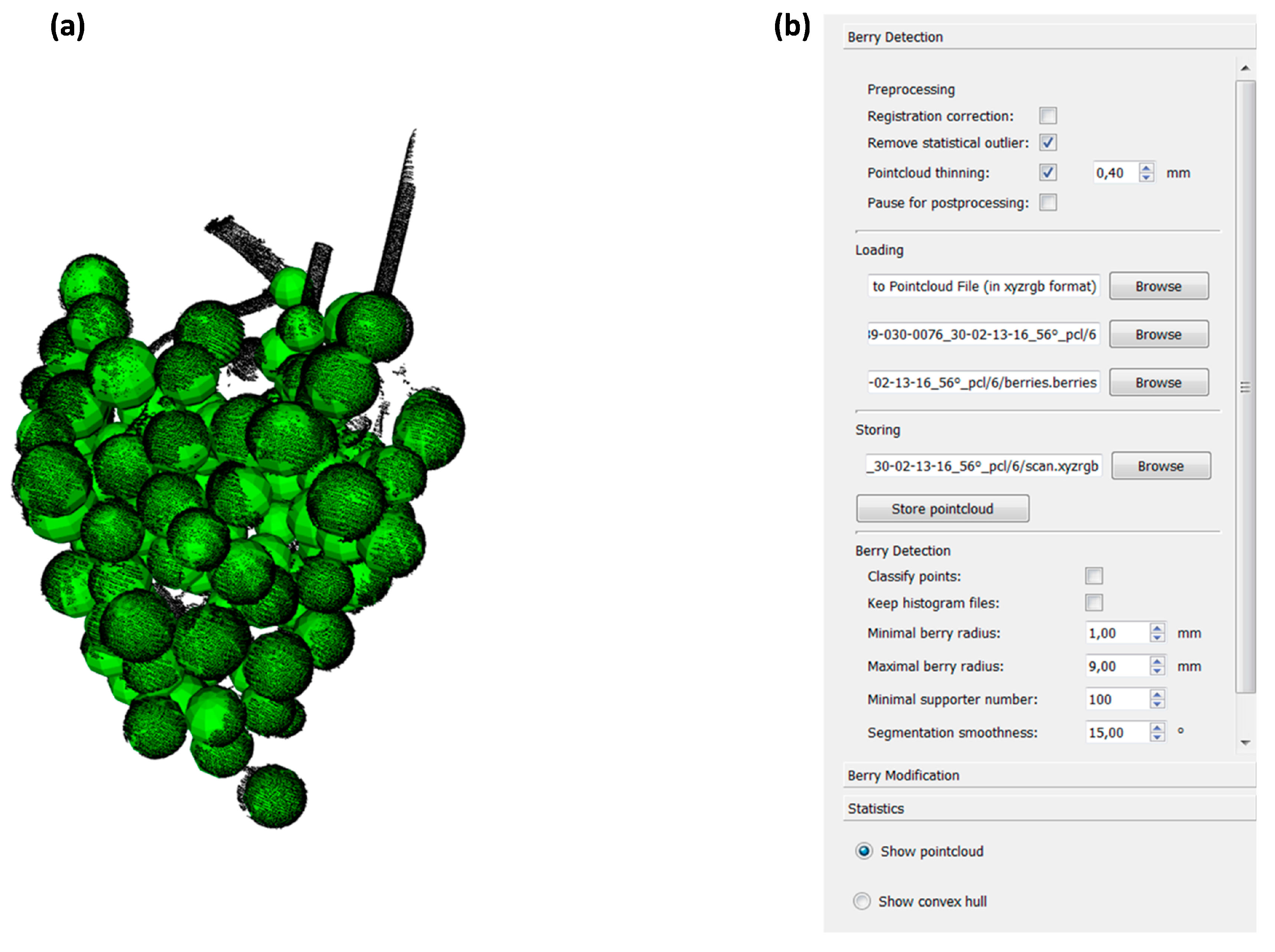
2.3. “3D-Bunch-Tool” with Graphical User Interface
- Step (1)
- Pre-processing step: Reduction of high-resolution point cloud to reduce computing time.
- Step (2)
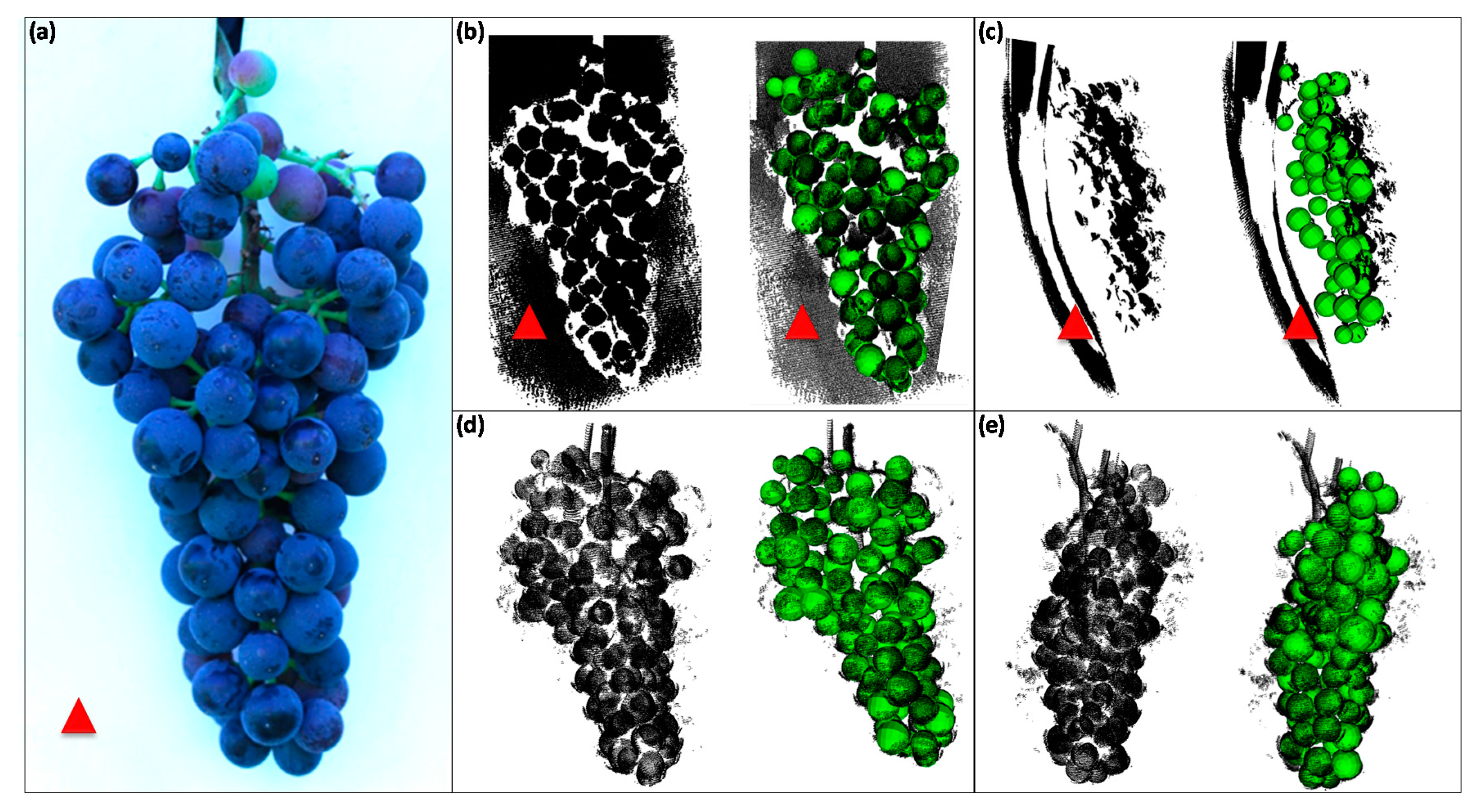
- Segmentation step: all points of the point cloud are segmented into smoothly connected regions using a region growing approach (Figure 2). Most of these regions contain one berry, but due to irregularities and occlusion in the data, it is possible that more than one berry is included in a region (undersegmentation) or a berry is split into several regions (oversegmentation).
- Step (3)
- Berry detection step: We use a RANSAC-based approach to fit sphere models into the data, taking care of undersegmentation by extracting the inliers for each sphere from the region and reusing the remaining data until the number of points contained in the region fall below the minimal number of inliers or no model could be found (Figure 2). Only sphere models showing a radius in the range between minimal and maximal berry radius and a sufficient number of inliers, i.e., points lying close to the surface of the model, are kept. A post-processing step is used to deal with oversegmentation: all sphere models with significant overlap (more than 25%) are compared to each other and only the one with the most inliers is considered to be a detected berry.
- (1)
- Maximal bunch length and bunch width, i.e., maximal diameter of the grape bunch parallel to the y-axis (length) and the maximal diameter parallel to x- or z-axis (width).
- (2)
- Volume of the convex hull of all points lying inside a detected berry.
- (3)
- Average diameter of the detected berries, i.e., average berry size.
- (4)
- Average volume of the detected berries.
- (5)
- Total berry volume.
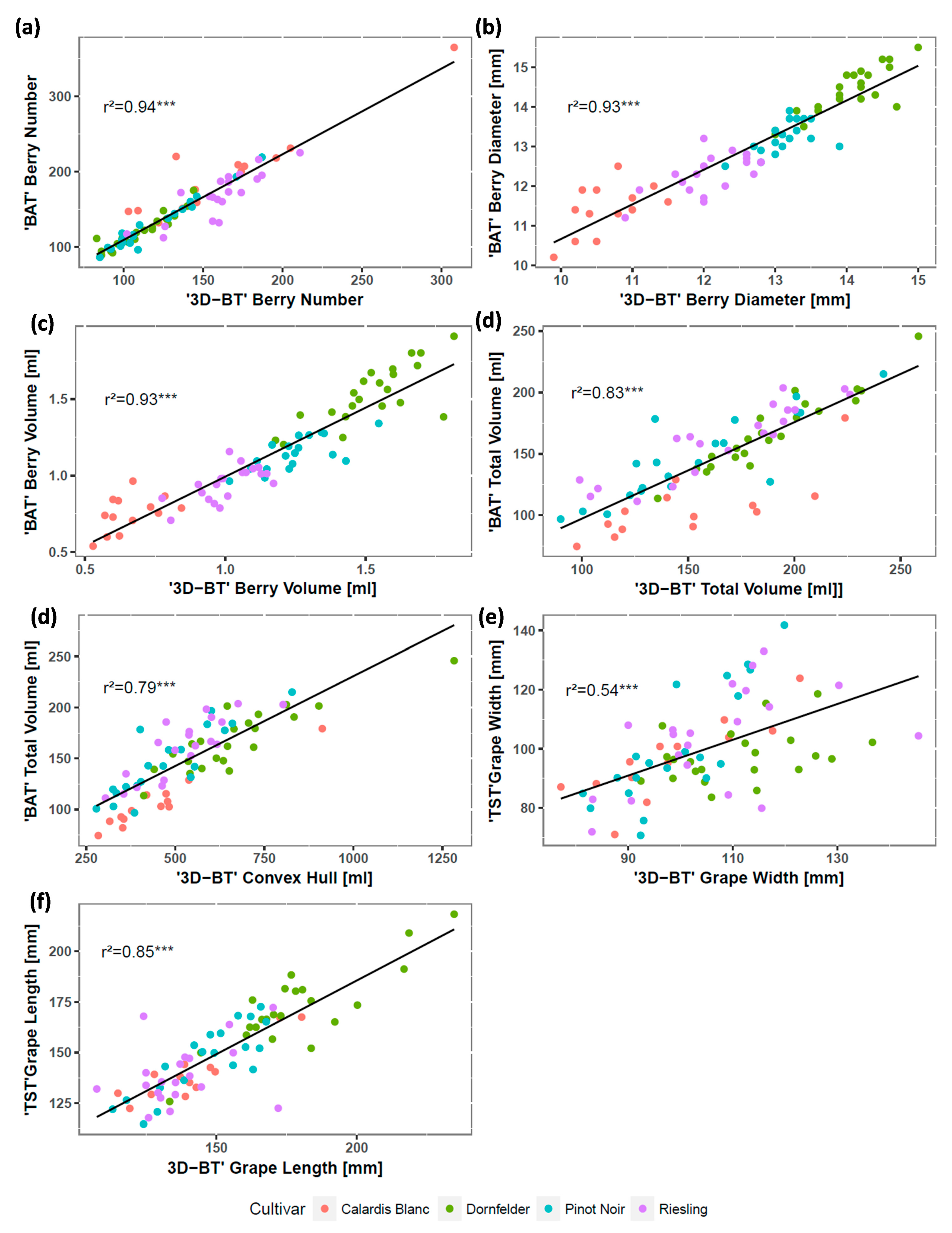
2.4. Ground Truth Data and Statistics
3. Results and Discussion
3.1. Establishment of Artec Spider 3D Scanner
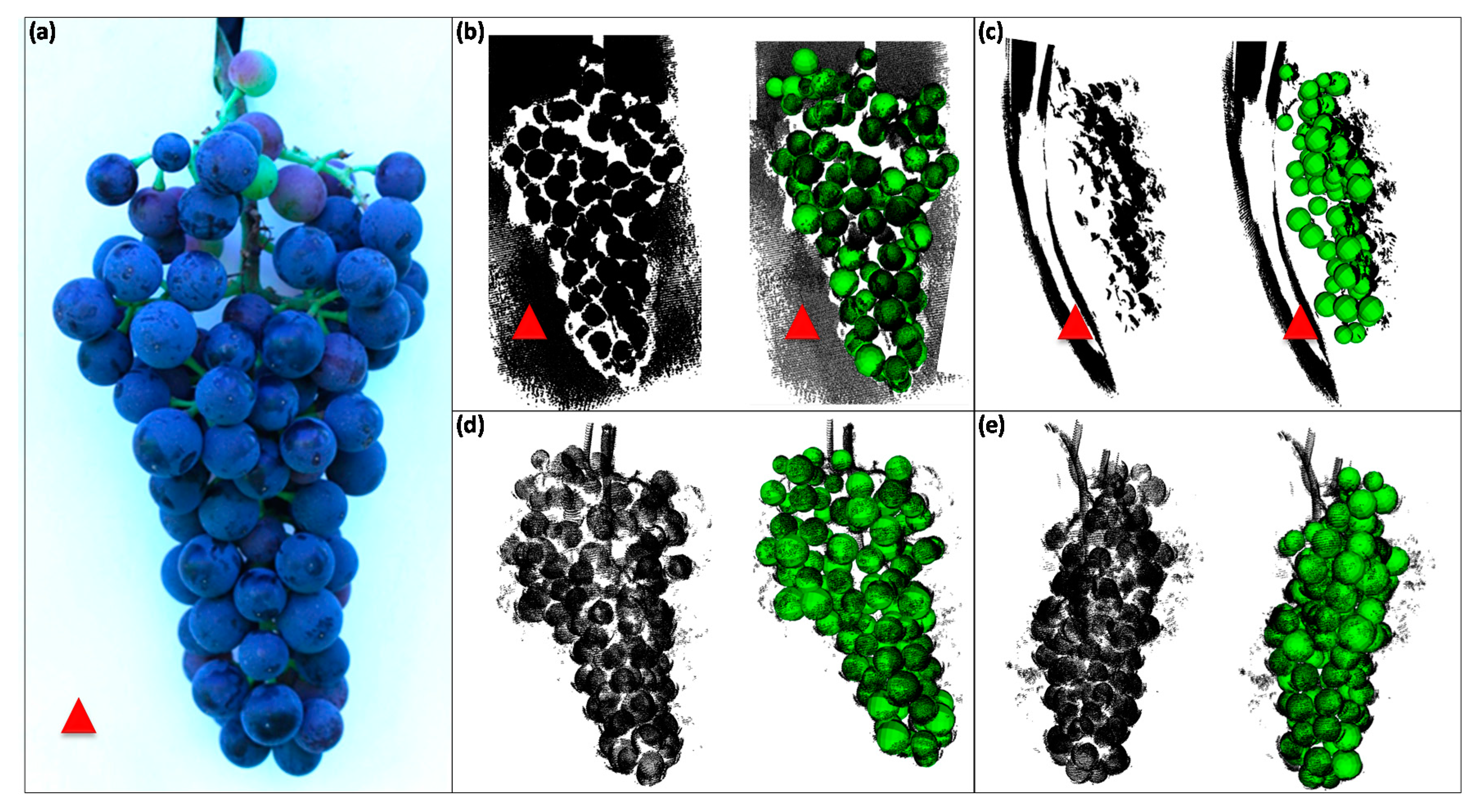
3.2. Proof-of-Principle on Selected Grapevine Cultivars
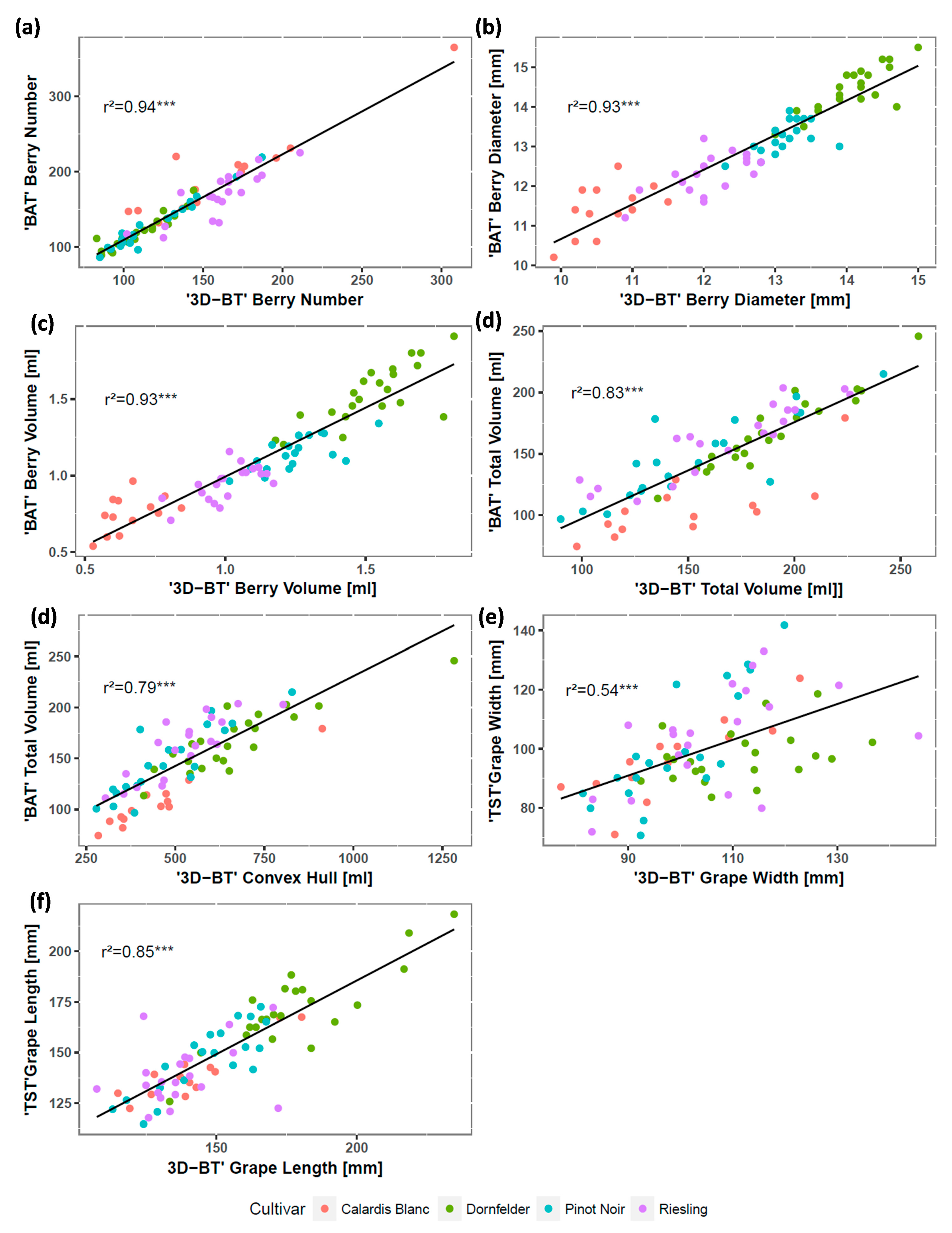
3.3. Test of Reliability: Application of the Workflow on High Varying Breeding Material
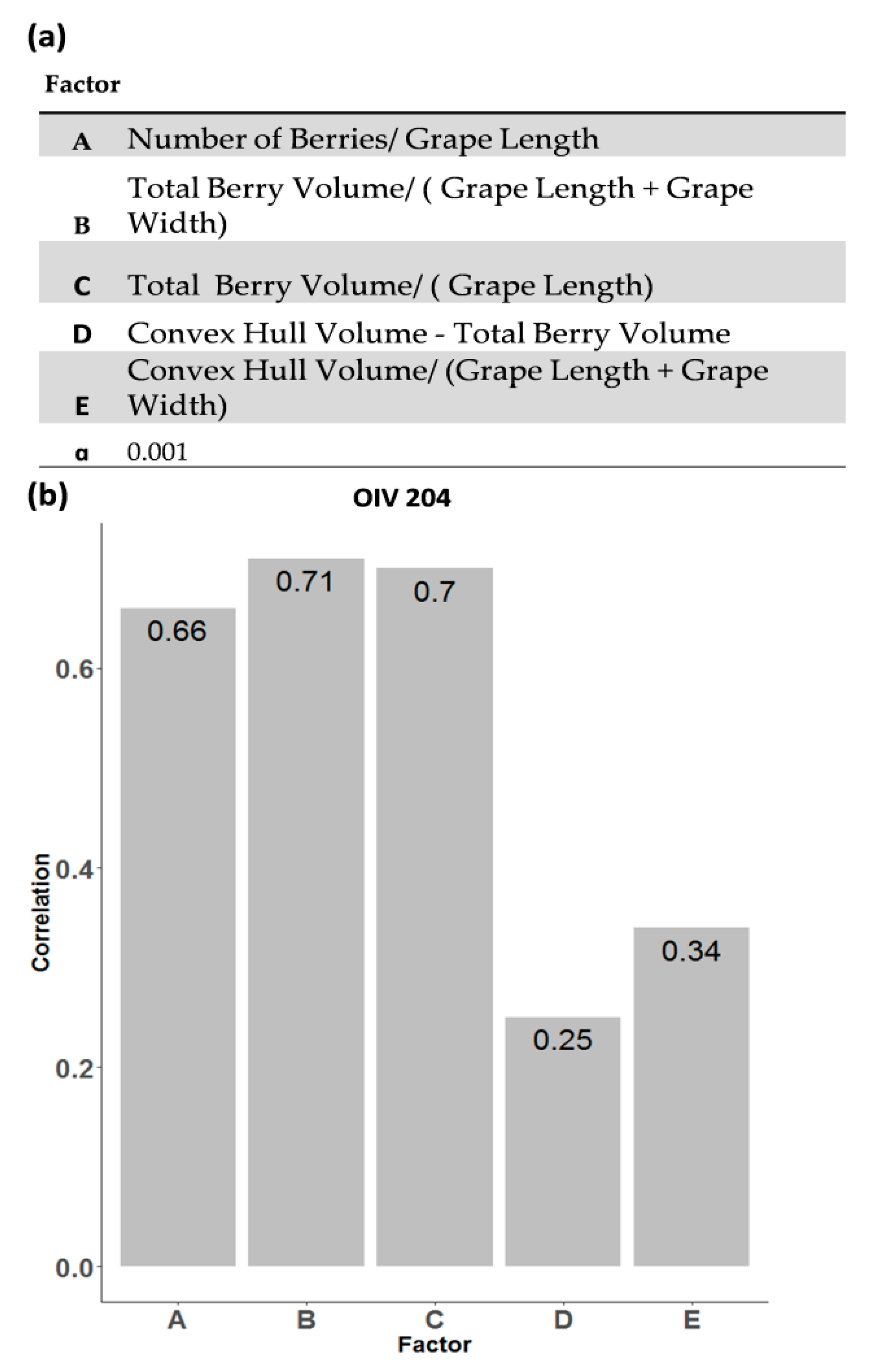
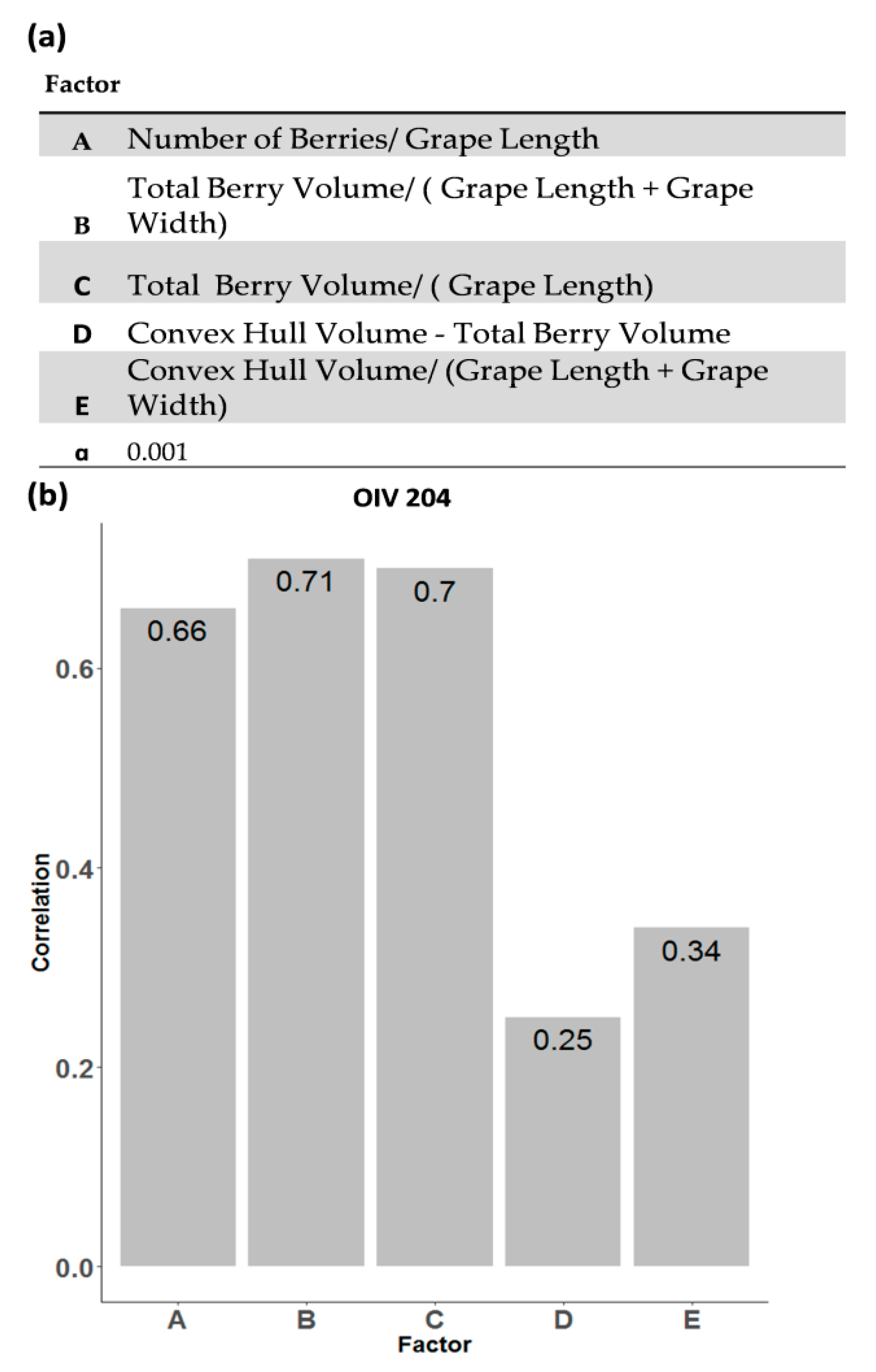
3.4. Factor Analysis for an Objective Assessment of Bunch Compactness
3.5. Proof-of-Principle: Field Application Test for Non-Invasive, High-Precision Phenotyping
4. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Organization Internationale de la Vigne et du Vin (OIV). World Vitiviniculture Situation; OIV Statistical Report on World Vitiviniculture; OIV: Paris, France, 2017. [Google Scholar]
- Molitor, D.; Behr, M.; Hoffmann, L.; Evers, D. Impact of Grape Cluster Division on Cluster Morphology and Bunch Rot Epidemic. Am. Enol. J. Vitic. 2012, 63, 508–514. [Google Scholar] [CrossRef]
- Vail, M.E.; Marois, J.J. Grape cluster architecture and the susceptibility of berries to Botrytis cinerea. Phytopathology 1991, 81, 188–191. [Google Scholar] [CrossRef]
- Vail, M.E.; Wolpert, A.J.; Gubler, W.D.; Rademacher, M.R. Effect of Cluster Tightness on Botrytis Bunch Rot in Six Chardonnay Clones. Plant Dis. 1998, 82, 107–109. [Google Scholar] [CrossRef]
- Hed, B.; Ngugi, H.K.; Travis, J.W. Relationship between Cluster Compactness and Bunch Rot in Vignoles Grapes. Plant Dis. 2009, 93, 1195–1201. [Google Scholar] [CrossRef]
- Herzog, K.; Wind, R.; Töpfer, R. Impedance of the grape berry cuticle as a novel phenotypic trait to estimate resistance to Botrytis cinerea. Sensors 2015, 15, 12498–12512. [Google Scholar] [CrossRef] [PubMed]
- Gabler, F.M.; Smilanick, J.L.; Mansour, M.; Ramming, D.W.; Mackey, B.E. Correlations of Morphological, Anatomical, and Chemical Features of Grape Berries with Resistance to Botrytis cinerea. Phytopathology 2003, 93, 1263–1273. [Google Scholar] [CrossRef] [PubMed]
- Organization Internationale de la Vigne et du Vin (OIV). OIV Descriptor List for Grape Varieties and Vitis Species; OIV (Office International de la Vigne et du Vin): Paris, France, 2007. [Google Scholar]
- Diago, M.P.; Tardaguila, J.; Aleixos, N.; Millan, B.; Prats-Montalban, J.M.; Cubero, S.; Blasco, J. Assessment of Cluster Yield Components by Image Analysis. J. Sci. Food Agric. 2015, 95, 1274–1282. [Google Scholar] [CrossRef] [PubMed]
- Kicherer, A.; Roscher, R.; Herzog, K.; Förstner, W.; Töpfer, R. Image based evaluation for the detection of cluster parameters in grapevine. Acta Hortic. 2015, 1082, 335–340. [Google Scholar] [CrossRef]
- Cubero, S.; Diago, M.P.; Blasco, J.; Tardaguila, J.; Prats-Montalbán, J.M.; Ibáñez, J.; Tello, J.; Aleixos, N. A new method for assessment of bunch compactness using automated image analysis. Aust. J. Grape Wine Res. 2015, 21, 101–109. [Google Scholar] [CrossRef]
- Tello, J.; Cubero, S.; Blasco, J.; Tardaguila, J.; Aleixos, N.; Ibáñez, J. Application of 2D and 3D image technologies to characterise morphological attributes of grapevine clusters. Sci. J. Food Agric. 2016, 96, 4575–4583. [Google Scholar] [CrossRef] [PubMed]
- Kicherer, A.; Roscher, R.; Herzog, K.; Šimon, S.; Förstner, W.; Töpfer, R. BAT (Berry Analysis Tool): A high-throughput image interpretation tool to acquire the number, diameter, and volume of grapevine berries. Vitis Grapevine J. Res. 2013, 52, 129–135. [Google Scholar]
- Cubero, S.; Diago, M.P.; Blasco, J.; Tardáguila, J.; Millán, B.; Aleixos, N. A new method for pedicel/peduncle detection and size assessment of grapevine berries and other fruits by image analysis. Biosyst. Eng. 2014, 117, 62–72. [Google Scholar] [CrossRef]
- Aquino, A.; Diago, M.P.; Millán, B.; Tardáguila, J. A new methodology for estimating the grapevine-berry number per cluster using image analysis. Biosyst. Eng. 2017, 156, 80–95. [Google Scholar] [CrossRef]
- Wahabzada, M.; Paulus, S.; Kersting, K.; Mahlein, A.-K. Automated interpretation of 3D laserscanned point clouds for plant organ segmentation. BMC Bioinform. 2015, 16, 248–259. [Google Scholar] [CrossRef] [PubMed]
- Herrero-Huerta, M.; González-Aguilera, D.; Rodriguez-Gonzalvez, P.; Hernández-López, D. Vineyard yield estimation by automatic 3D bunch modelling in field conditions. Comput. Electron. Agric. 2015, 110, 17–26. [Google Scholar] [CrossRef]
- Ivorra, E.; Sánchez, A.J.; Camarasa, J.G.; Diago, M.P.; Tardaguila, J. Assessment of grape cluster yield components based on 3D descriptors using stereo vision. Food Control 2015, 50, 273–282. [Google Scholar] [CrossRef]
- Rose, J.C.; Kicherer, A.; Wieland, M.; Klingbeil, L.; Töpfer, R.; Kuhlmann, H. Towards Automated Large-Scale 3D Phenotyping of Vineyards under Field Conditions. Sensors 2016, 16, 2136. [Google Scholar] [CrossRef] [PubMed]
- Mack, J.; Lenz, C.; Teutrine, J.; Steinhage, V. High-precision 3D detection and reconstruction of grapes from laser range data for efficient phenotyping based on supervised learning. Comput. Electron. Agric. 2017, 135, 300–311. [Google Scholar] [CrossRef]
- Zyprian, E.; Ochßner, I.; Schwander, F.; Šimon, S.; Hausmann, L.; Bonow-Rex, M.; Moreno-Sanz, P.; Grando, M.S.; Wiedemann-Merdinoglu, S.; Merdinoglu, D.; et al. Quantitative Trait Loci Affecting Pathogen Resistance and Ripening of Grapevines. Mol. Genet. Genom. 2016, 291, 1573–1594. [Google Scholar] [CrossRef] [PubMed]
- Herzog, K.; Roscher, R.; Wieland, M.; Kicherer, A.; Läbe, T.; Förstner, W. Initial Steps for High-Throughput Phenotyping in Vineyards. Vitis 2014, 53, 1–8. [Google Scholar]
- Pommer, C.V.; Pires, E.J.P.; Terra, M.M.; Passos, I.R.S. Streptomycin-Induced Seedlessness in the Grape Cultivar Rubi (Italia Red). Am. J. Enol. Viticult. 1996, 47, 340–342. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Number of Berries | Berry Diameter [mm] | Berry Volume [mL] | Total Volume [mL] | Convex Hull [mL] | Grape Width [mm] | Grape Length [mm] | α |
|---|---|---|---|---|---|---|---|---|
| fast | 72 A | 17.2 A | 2.7 A | 191.9 A | 948.8 A | 123.3 A | 176.9 A | 0.001 |
| slow | 70 A | 17.1 A | 2.7 A | 185.7 A | 929.6 A | 123.2 A | 176.6 A | 0.001 |
| Method: | 3D-BT | Ground Truth | ||||||
|---|---|---|---|---|---|---|---|---|
| >Trait | Min | Mean | Max | p-Value | r2 | Min | Mean | Max |
| Number of Berries | 12 | 128.5 | 322 | <0.001 | 0.95 | 11 | 163 | 491 |
| Berry Diameter [mm] | 9.2 | 13.2 | 16.9 | <0.001 | 0.87 | 7.6 | 13.8 | 17.4 |
| Berry Volume [mL] | 0.5 | 1.54 | 2.54 | <0.001 | 0.9 | 0.2 | 1.37 | 2.79 |
| Total Berry Volume [mL] | 19 | 212 | 504 | <0.001 | 0.95 | 2 | 235.7 | 678 |
| Convex Hull/Total Berry Volume [mL] | 129 | 770 | 3069 | <0.001 | 0.81 | 2 | 235.7 | 678 |
| Grape Width [mm] | 61.82 | 123.32 | 199.28 | <0.001 | 0.59 | 58.9 | 118.1 | 170 |
| Grape Length [mm] | 106 | 166.1 | 277 | <0.001 | 0.57 | 66.7 | 142.2 | 261.9 |
| n = 222 | ||||||||
| Method | Partial vs. 360° | |||
|---|---|---|---|---|
| Correlation Analysis | Mean Values | |||
| 3D Bunch Trait | r2 | p-Value | Partial | 360° |
| Number of Berries | 0.83 | <0.001 | 37 | 71 |
| Berry diameter [mm] | 0.78 | <0.001 | 17.1 | 17.1 |
| Berry volume [mL] | 0.8 | <0.001 | 2.6 | 2.7 |
| Total Berry Volume [mL] | 0.82 | <0.001 | 97.6 | 188.8 |
| Convex Hull [mL] | 0.72 | <0.001 | 431 | 939 |
| Grape Width [mm] | 0.71 | <0.001 | 108.5 | 123.3 |
| Grape Length [mm] | 0.7 | <0.001 | 165 | 176.7 |
| n = 100 | ||||
| Type of Scan | Number of Berries | Berry Diameter [mm] | Berry Volume [mL] | Total Volume [mL] | Convex Hull | Grape Width [mm] | Grape Length [mm] |
|---|---|---|---|---|---|---|---|
| 360° | 137 A | 12.8 A | 1.2 A | 152.6 A | 574.8 A | 106.4 A | 159.1 A |
| partial | 66 B | 13.1 A | 1.3 A | 79.7 B | 290 B | 90.5 B | 151.9 A |
| field | 66 B | 13.3 A | 1.3 A | 84.9 B | 409.2 C | 109.6 A | 155.8 A |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rist, F.; Herzog, K.; Mack, J.; Richter, R.; Steinhage, V.; Töpfer, R. High-Precision Phenotyping of Grape Bunch Architecture Using Fast 3D Sensor and Automation. Sensors 2018, 18, 763. https://doi.org/10.3390/s18030763
Rist F, Herzog K, Mack J, Richter R, Steinhage V, Töpfer R. High-Precision Phenotyping of Grape Bunch Architecture Using Fast 3D Sensor and Automation. Sensors. 2018; 18(3):763. https://doi.org/10.3390/s18030763
Chicago/Turabian StyleRist, Florian, Katja Herzog, Jenny Mack, Robert Richter, Volker Steinhage, and Reinhard Töpfer. 2018. "High-Precision Phenotyping of Grape Bunch Architecture Using Fast 3D Sensor and Automation" Sensors 18, no. 3: 763. https://doi.org/10.3390/s18030763
APA StyleRist, F., Herzog, K., Mack, J., Richter, R., Steinhage, V., & Töpfer, R. (2018). High-Precision Phenotyping of Grape Bunch Architecture Using Fast 3D Sensor and Automation. Sensors, 18(3), 763. https://doi.org/10.3390/s18030763