Combining Load and Motor Encoders to Compensate Nonlinear Disturbances for High Precision Tracking Control of Gear-Driven Gimbal

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
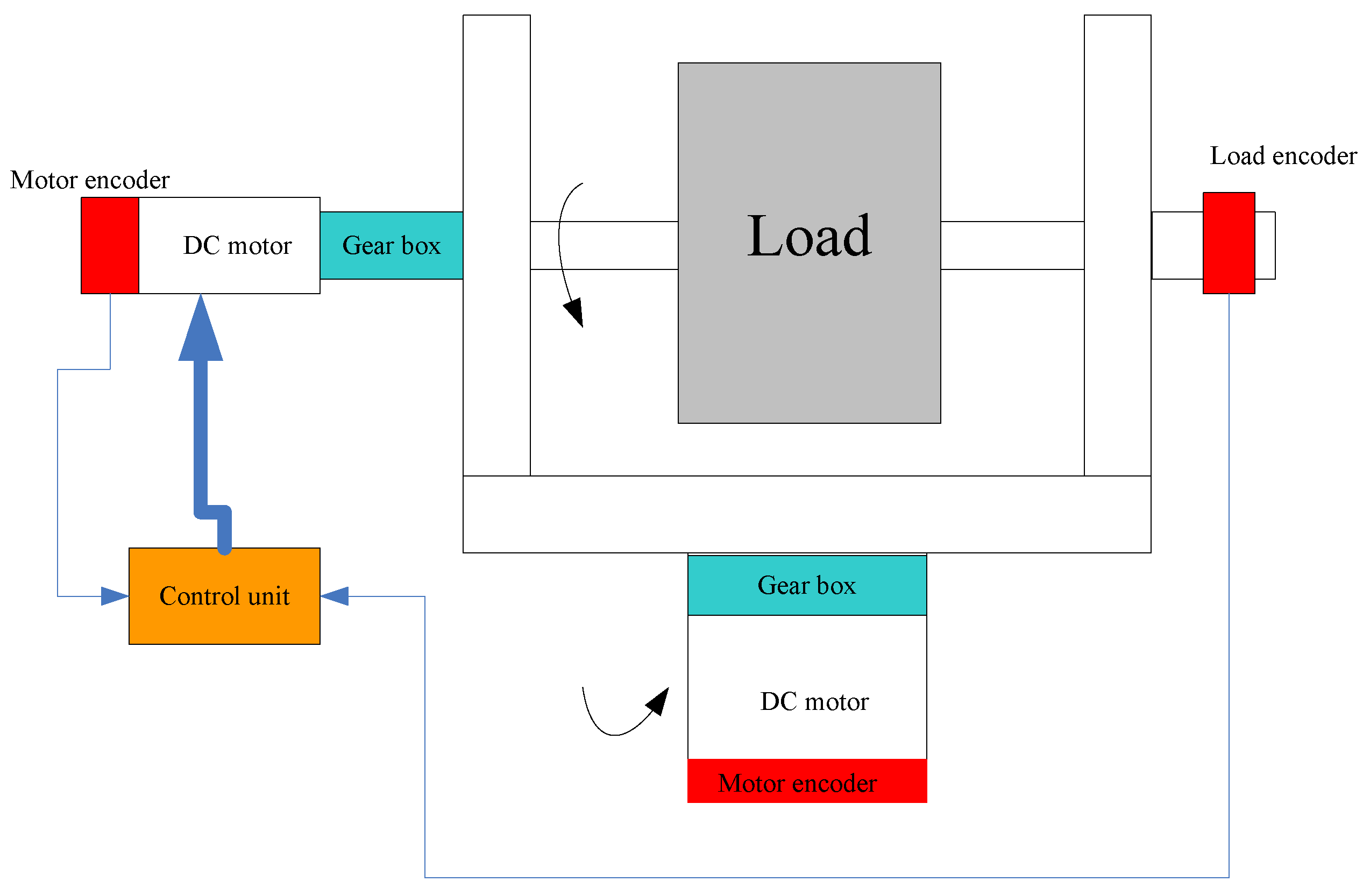
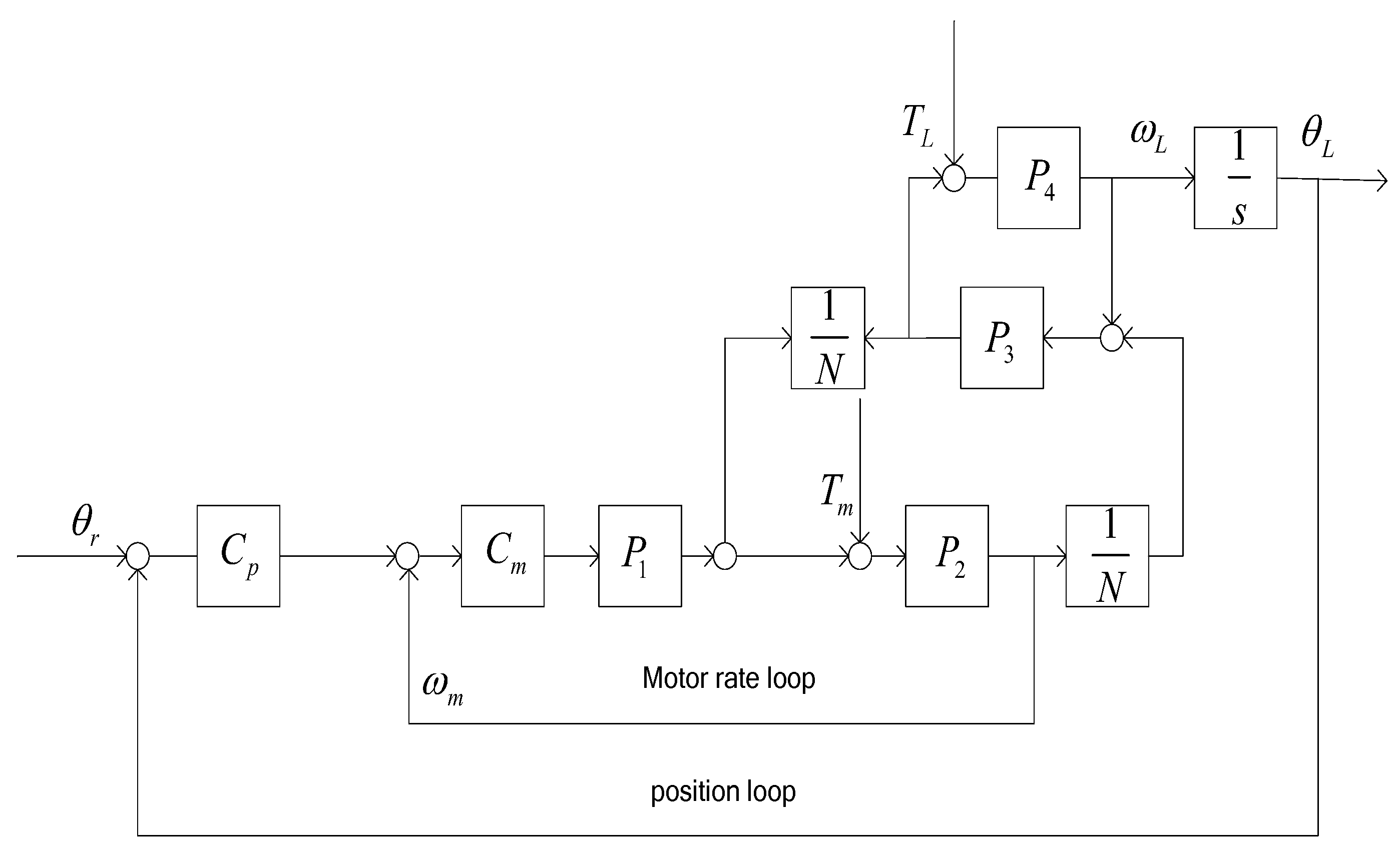
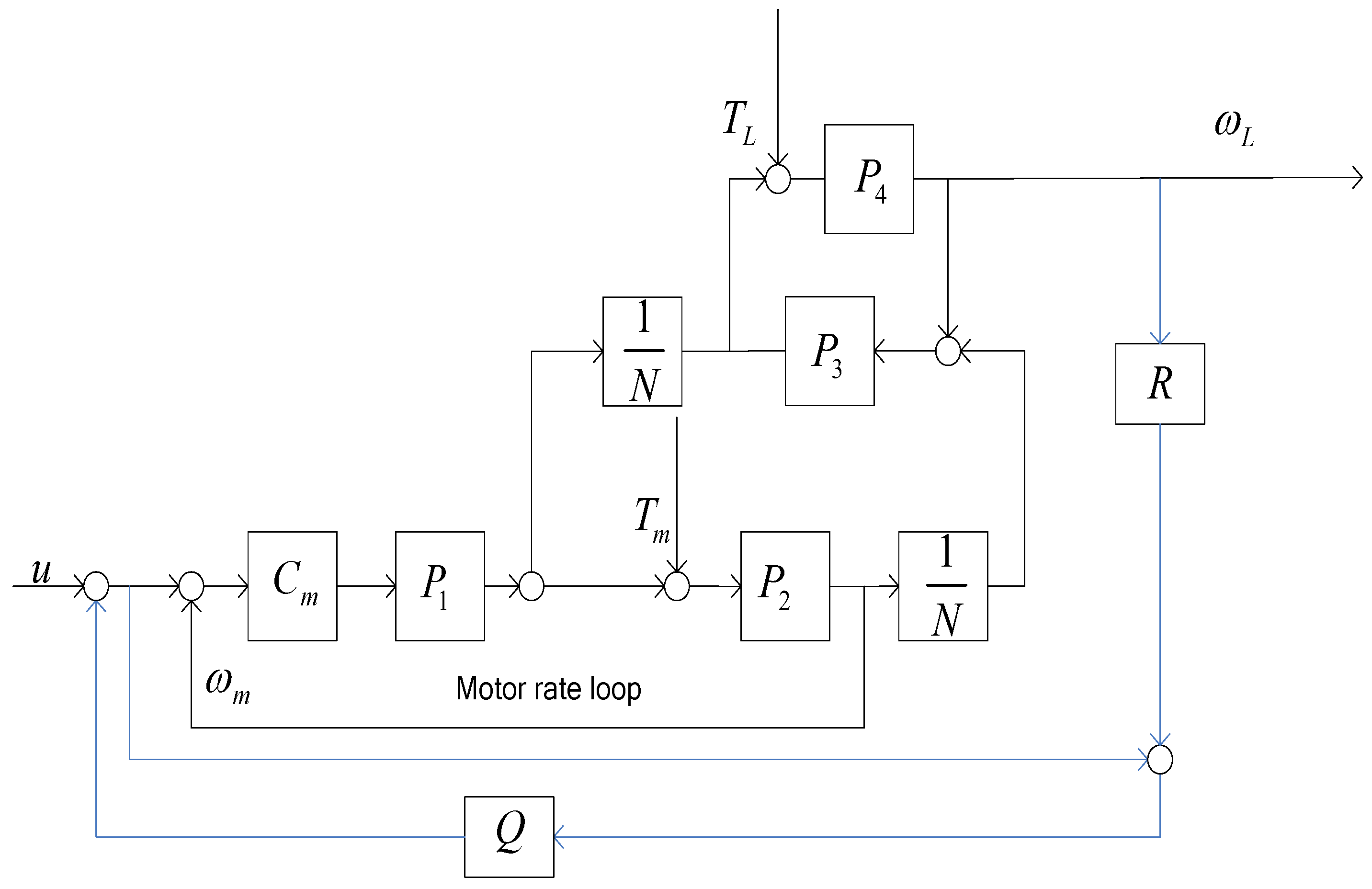
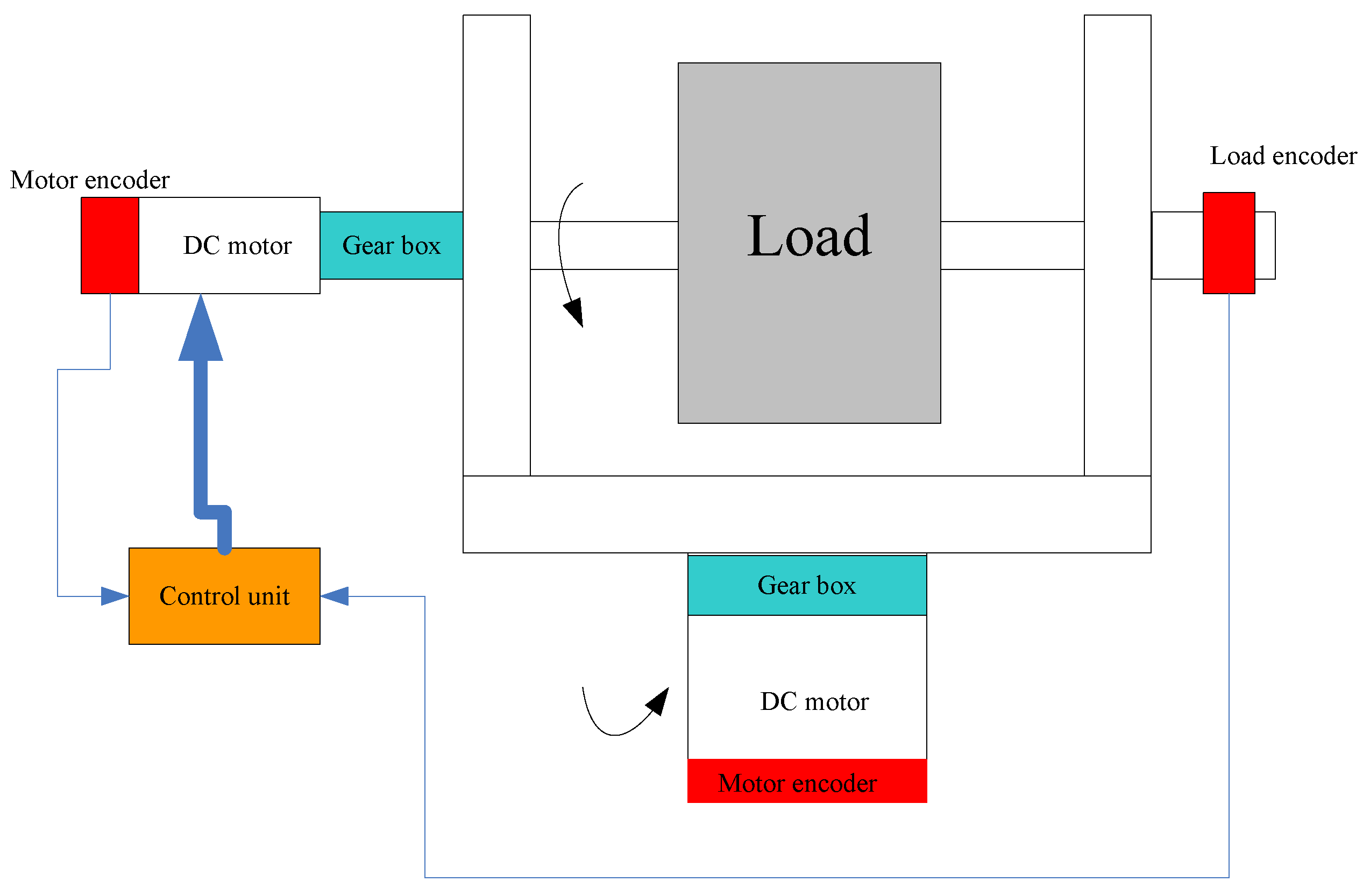
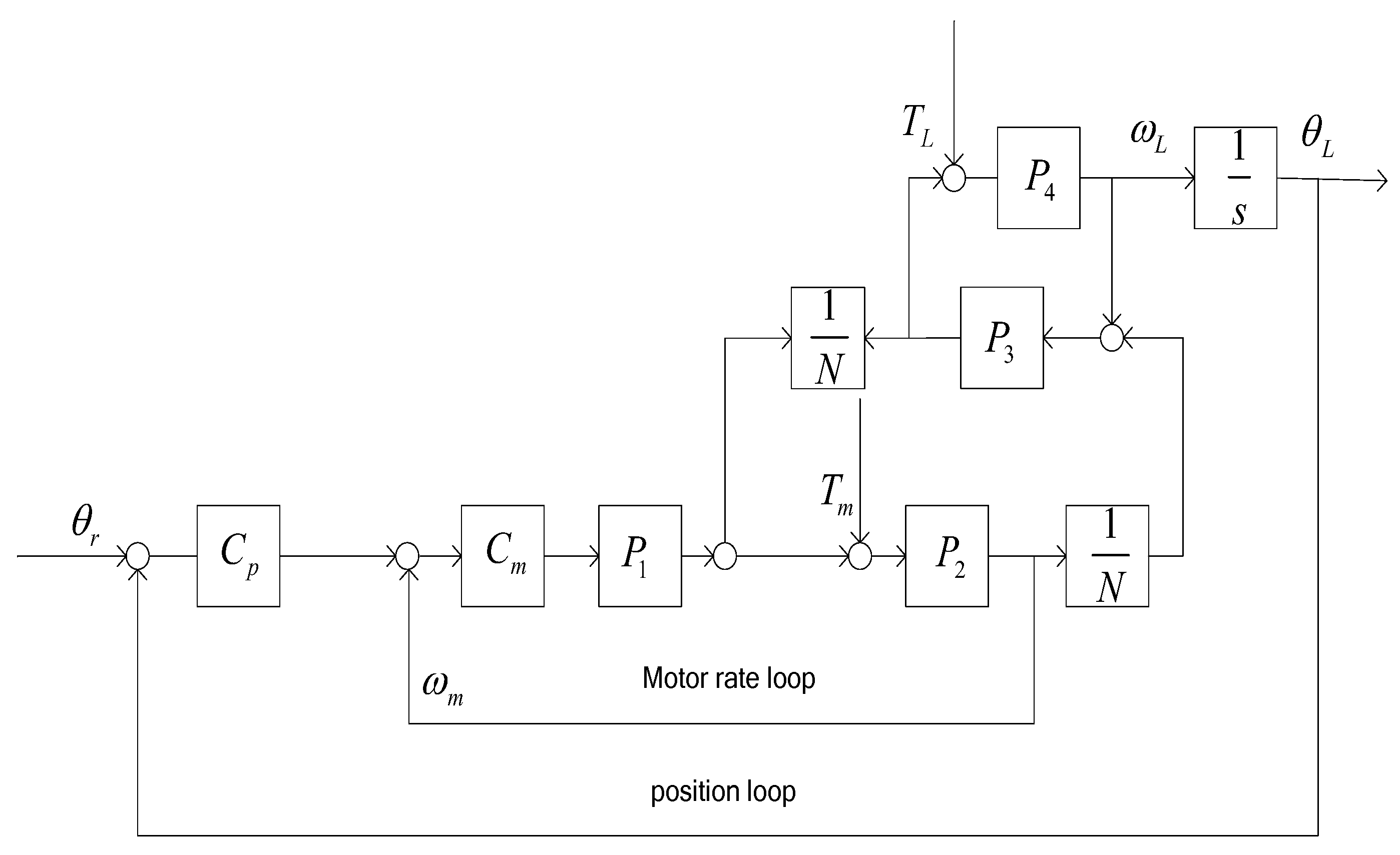
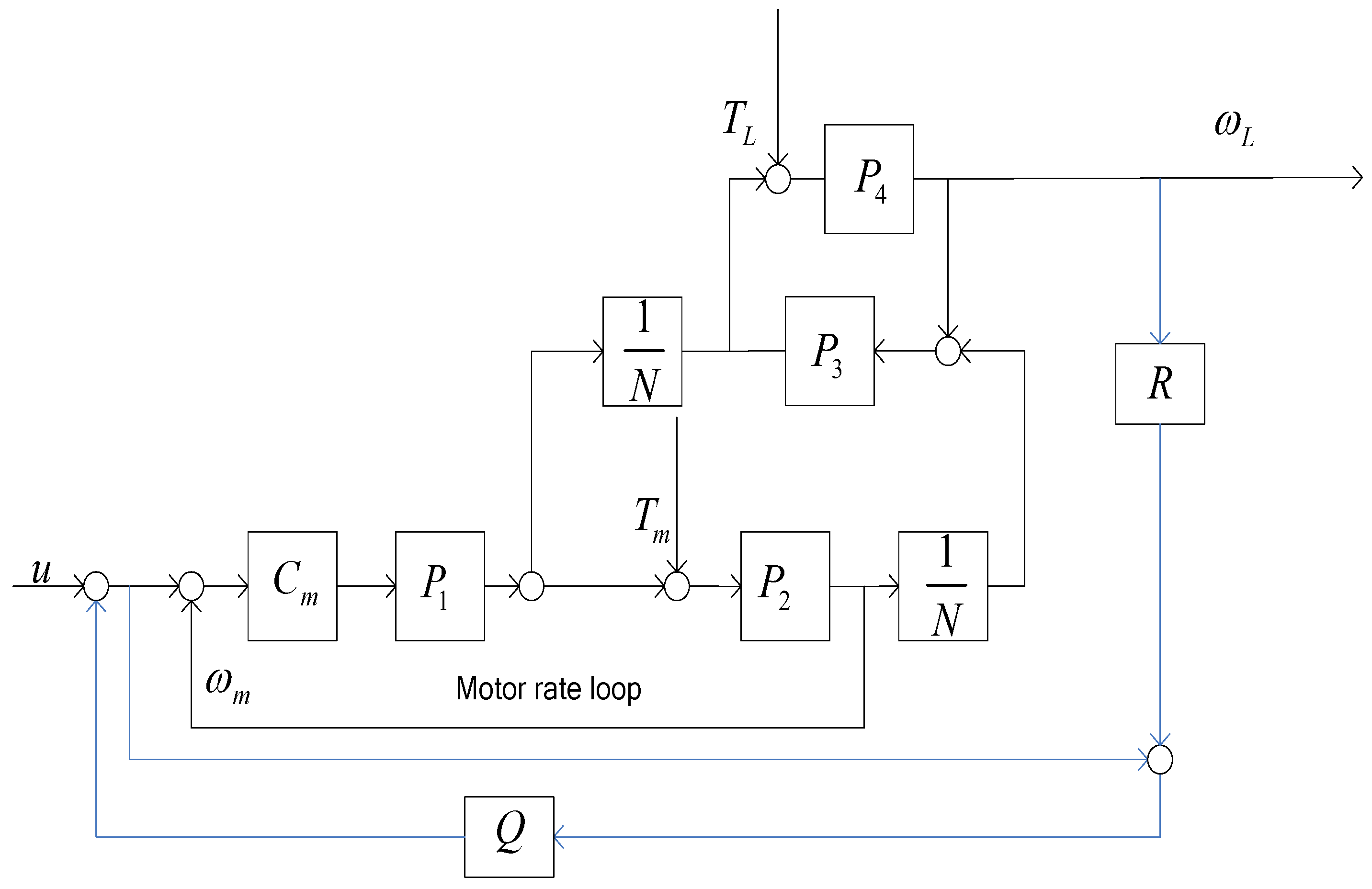
2. Control Model of Gear-Driven Gimbal
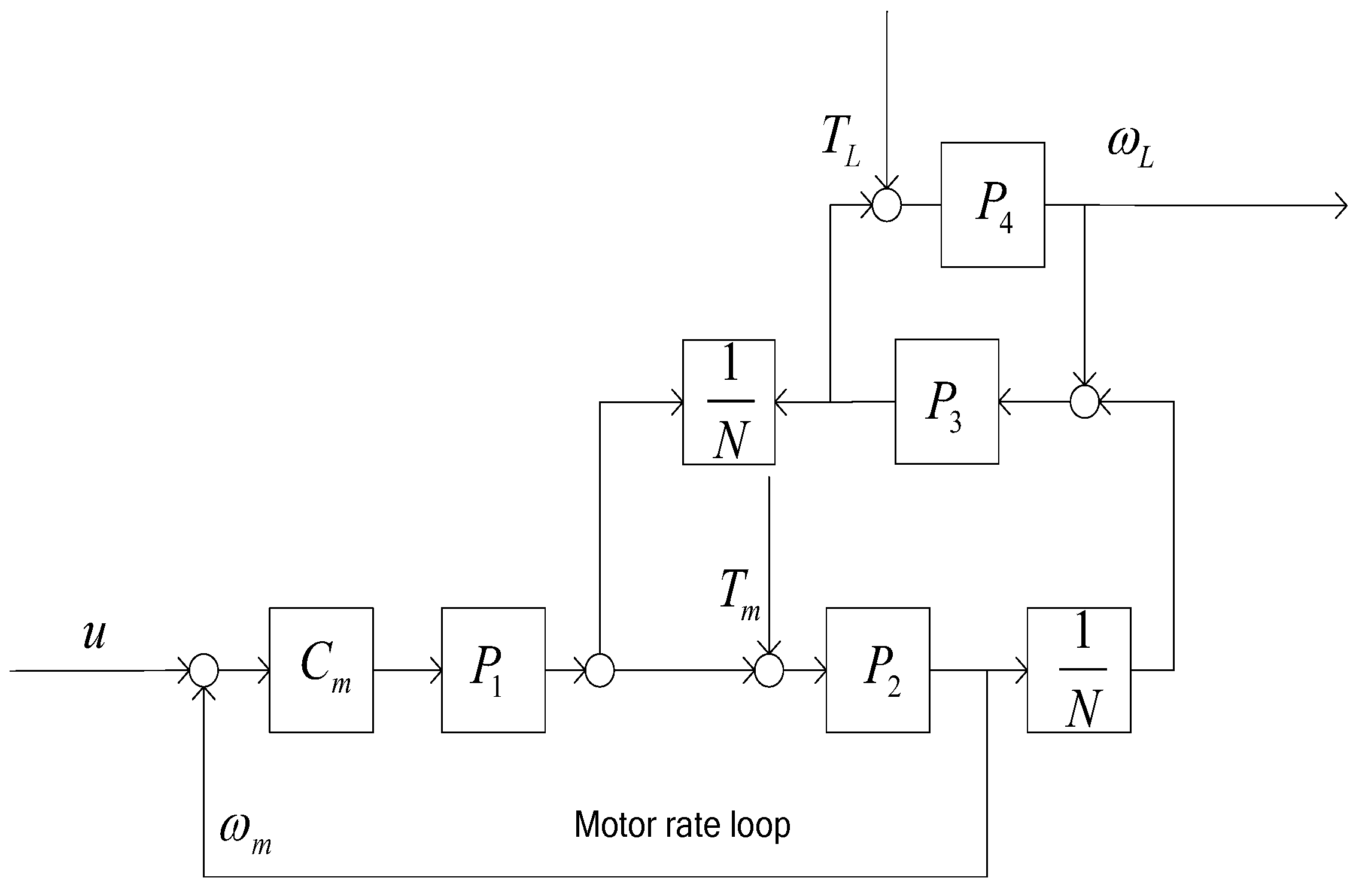
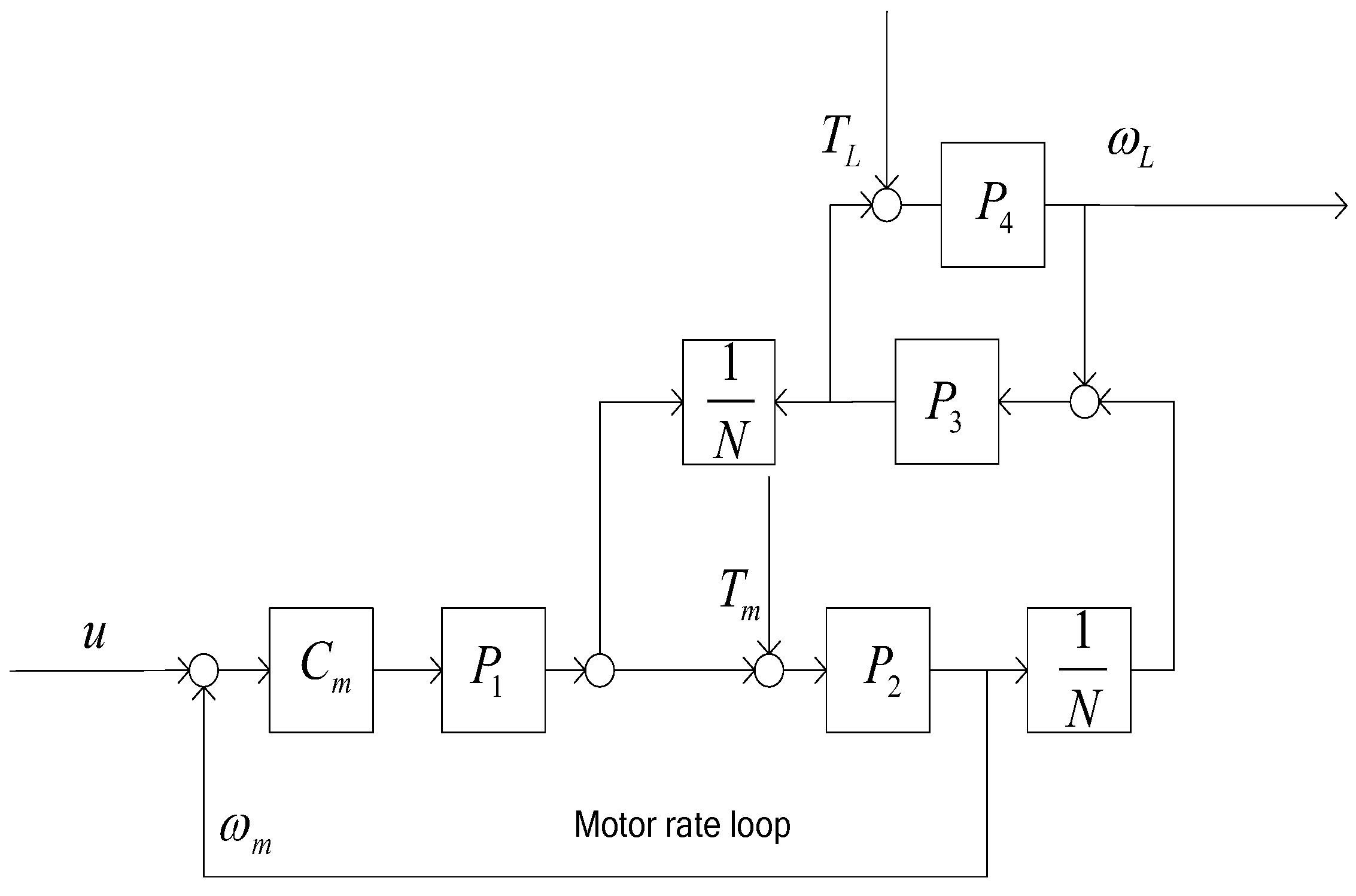
3. Robustness Analysis of the Rate Loop
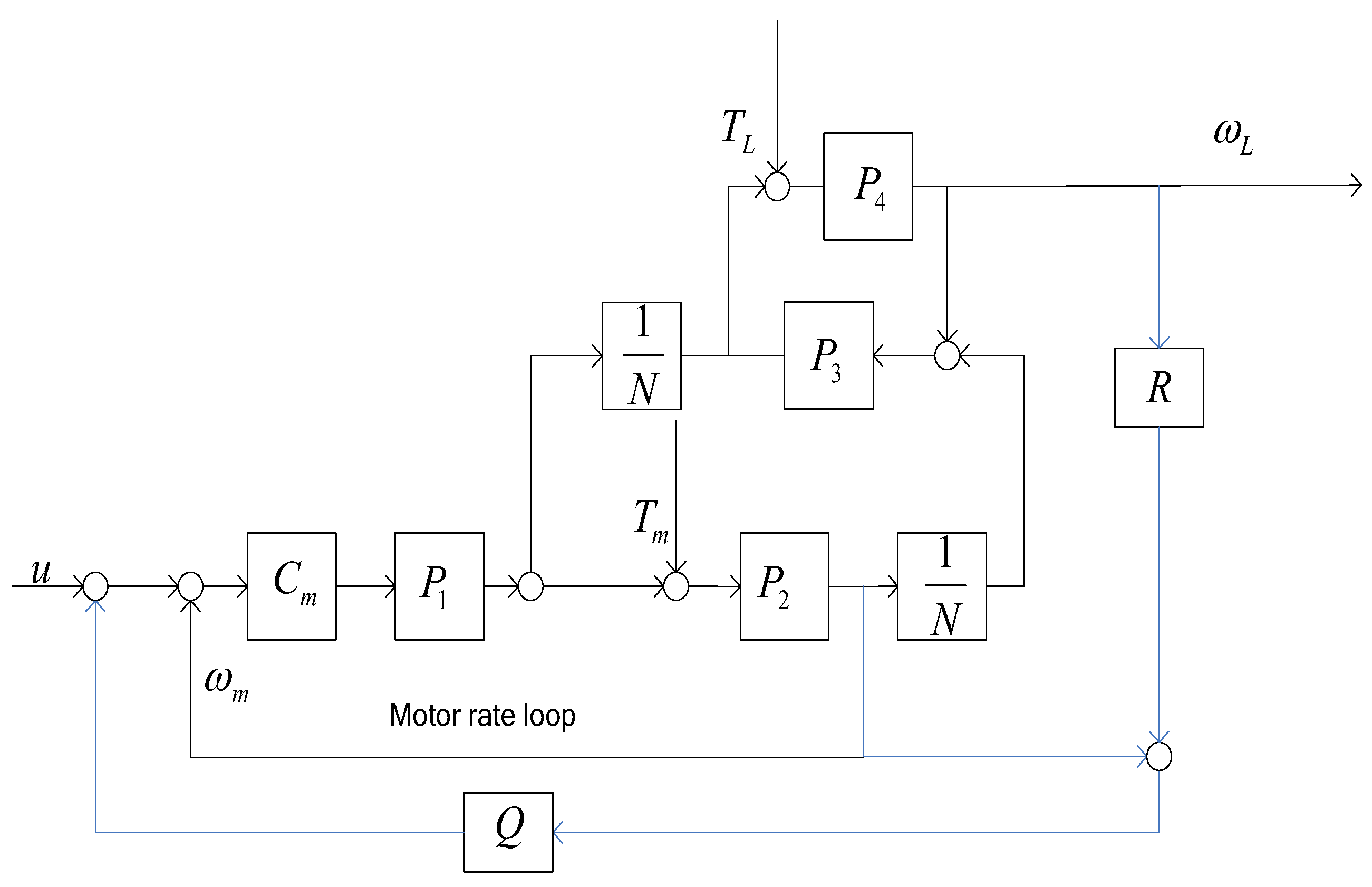
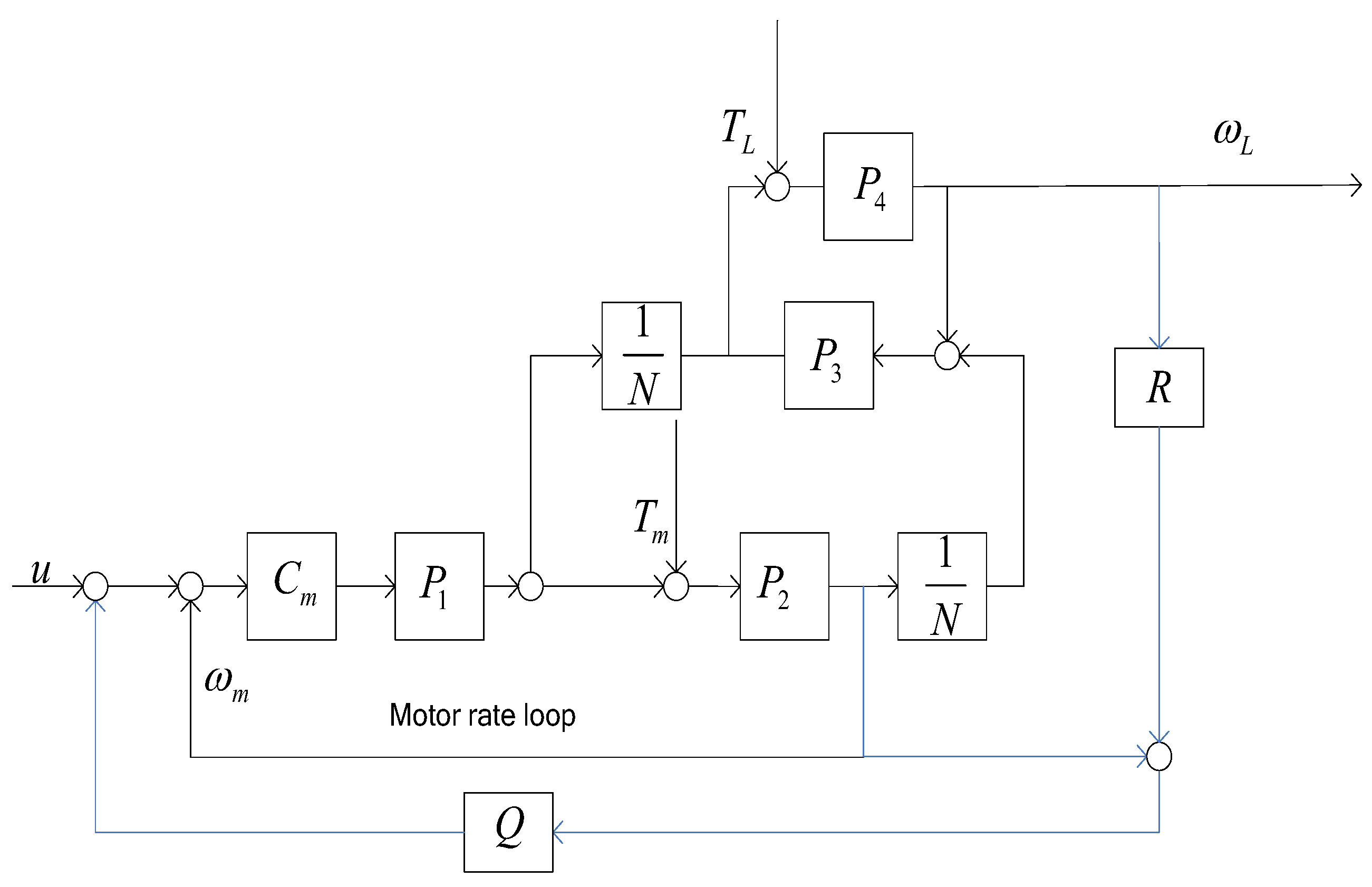
4. Disturbance Observer of the Gear-Drive Gimbal
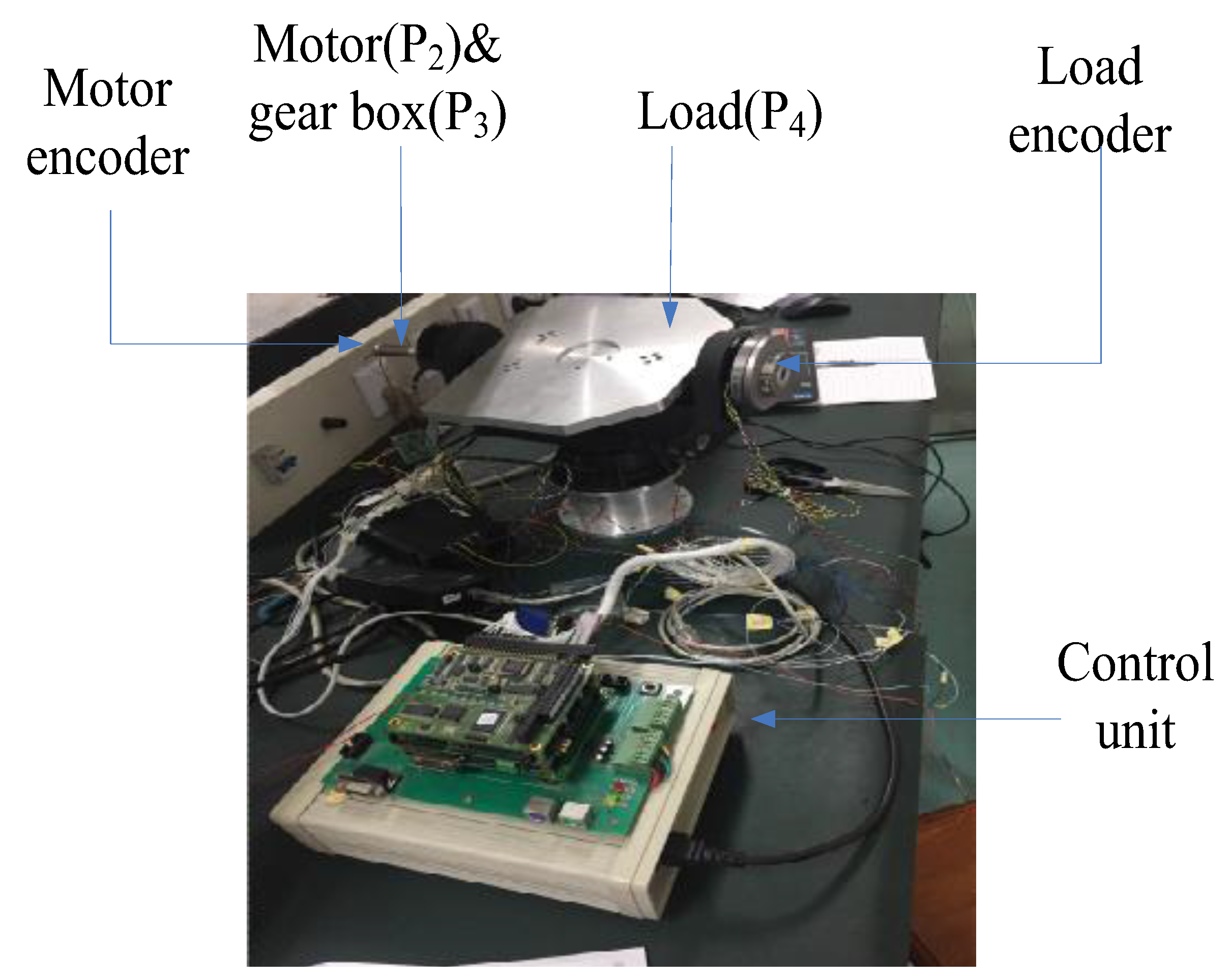
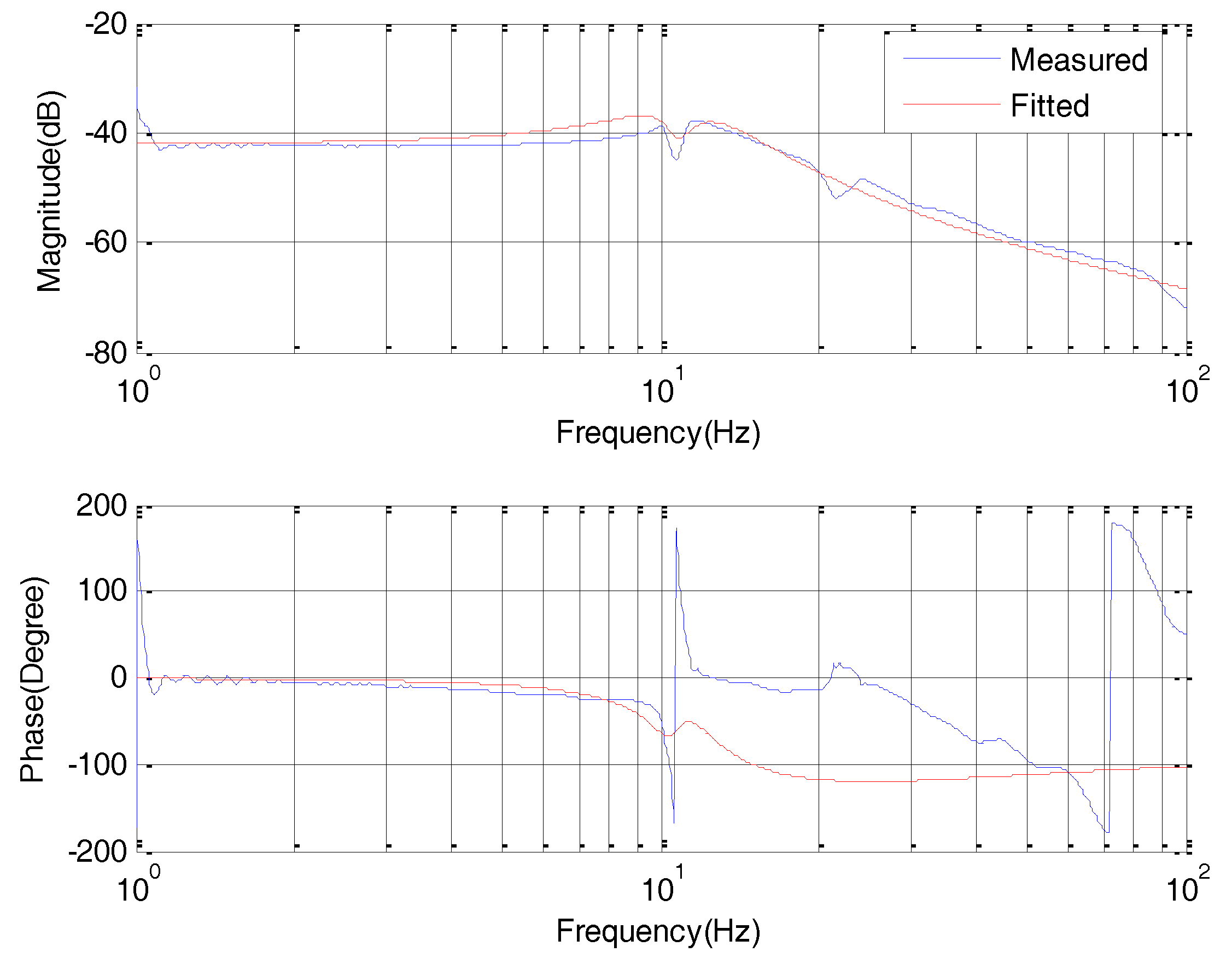
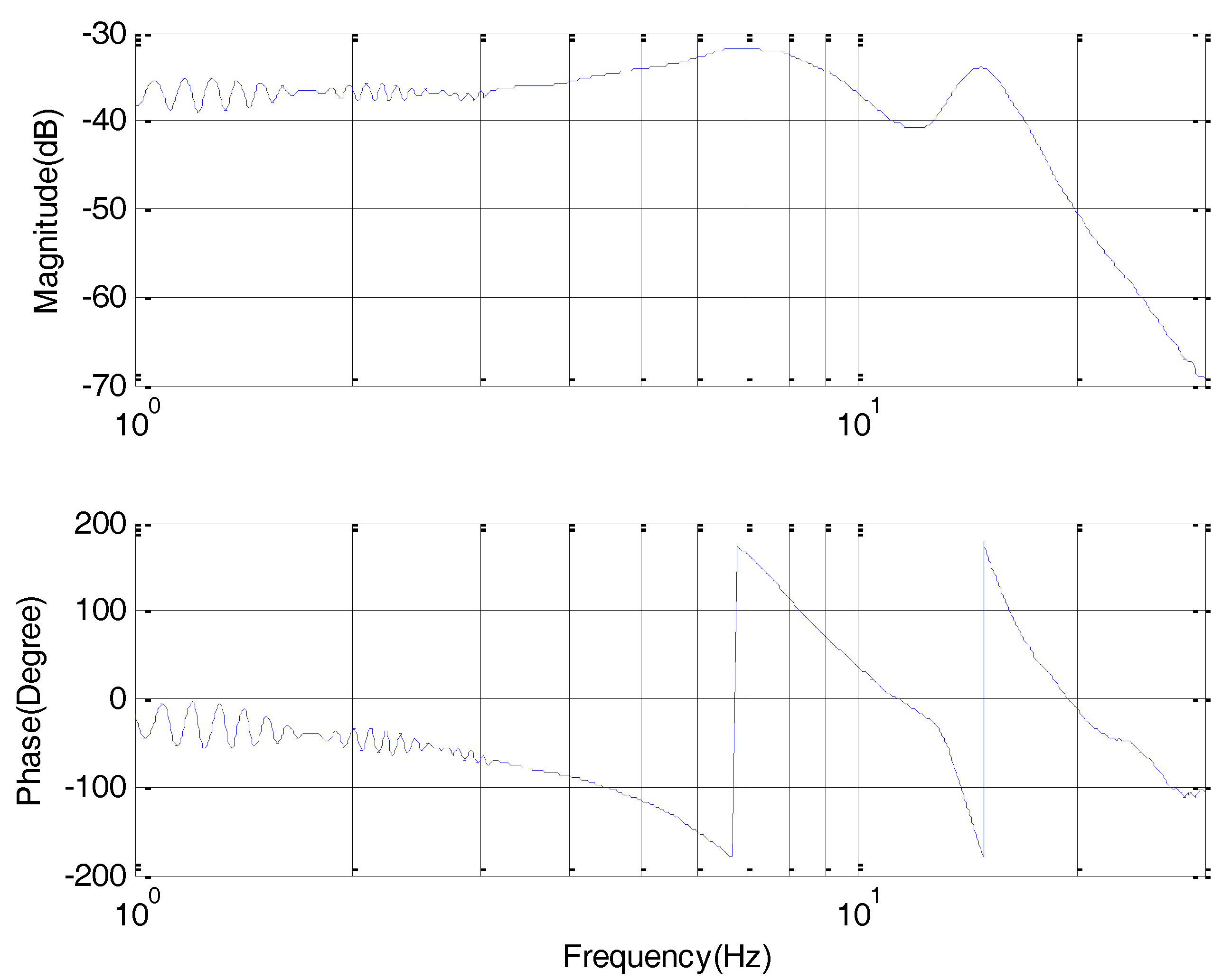
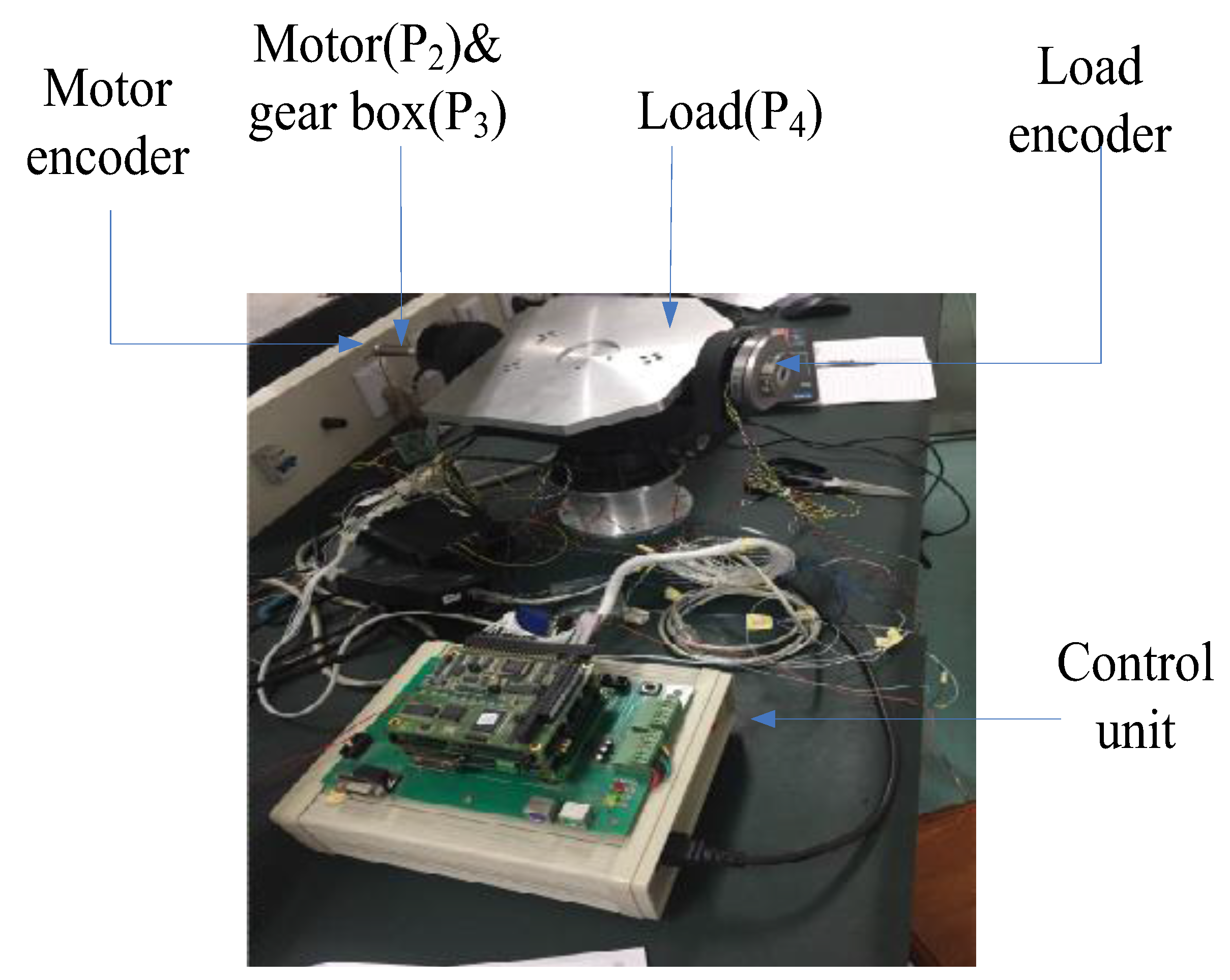
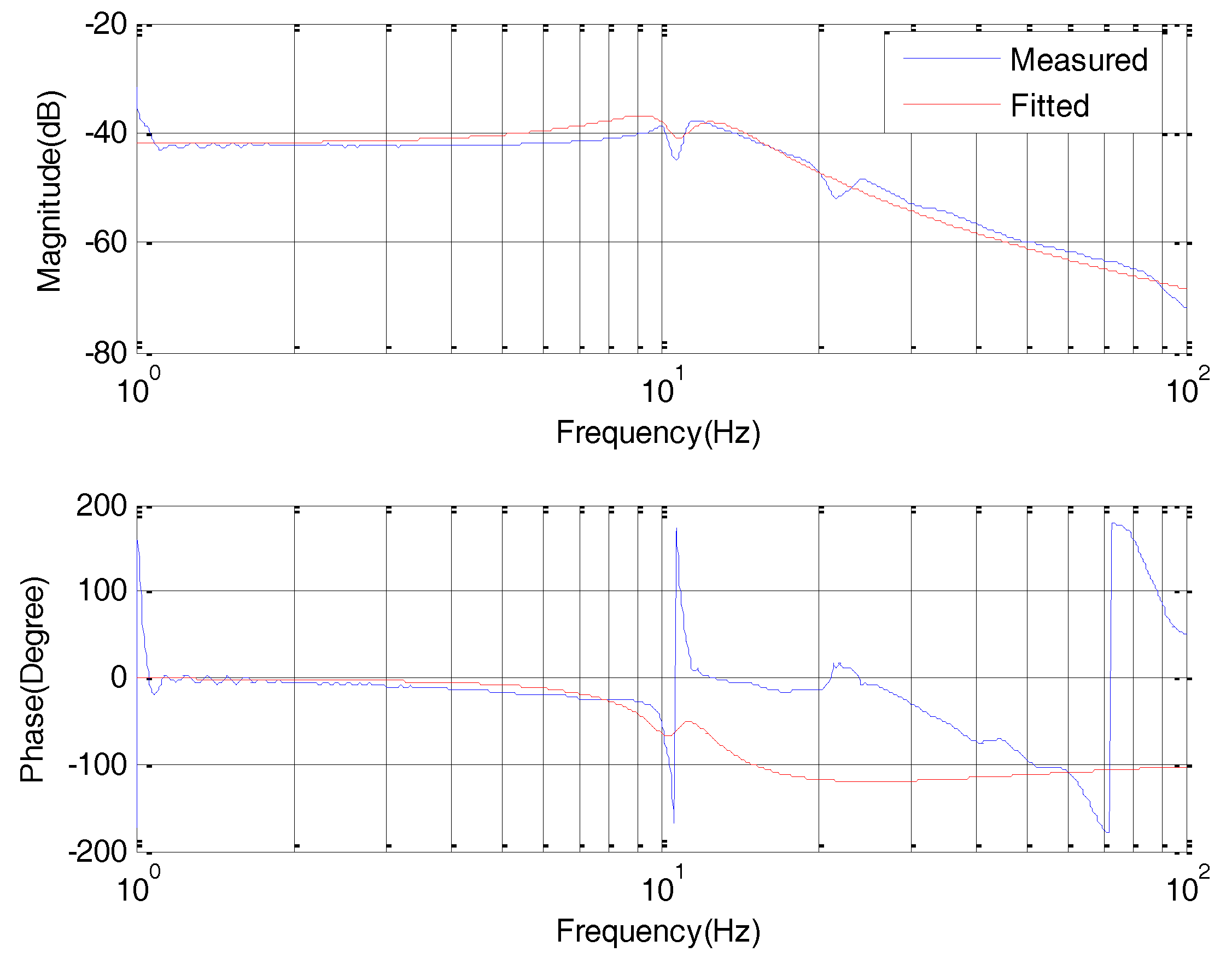
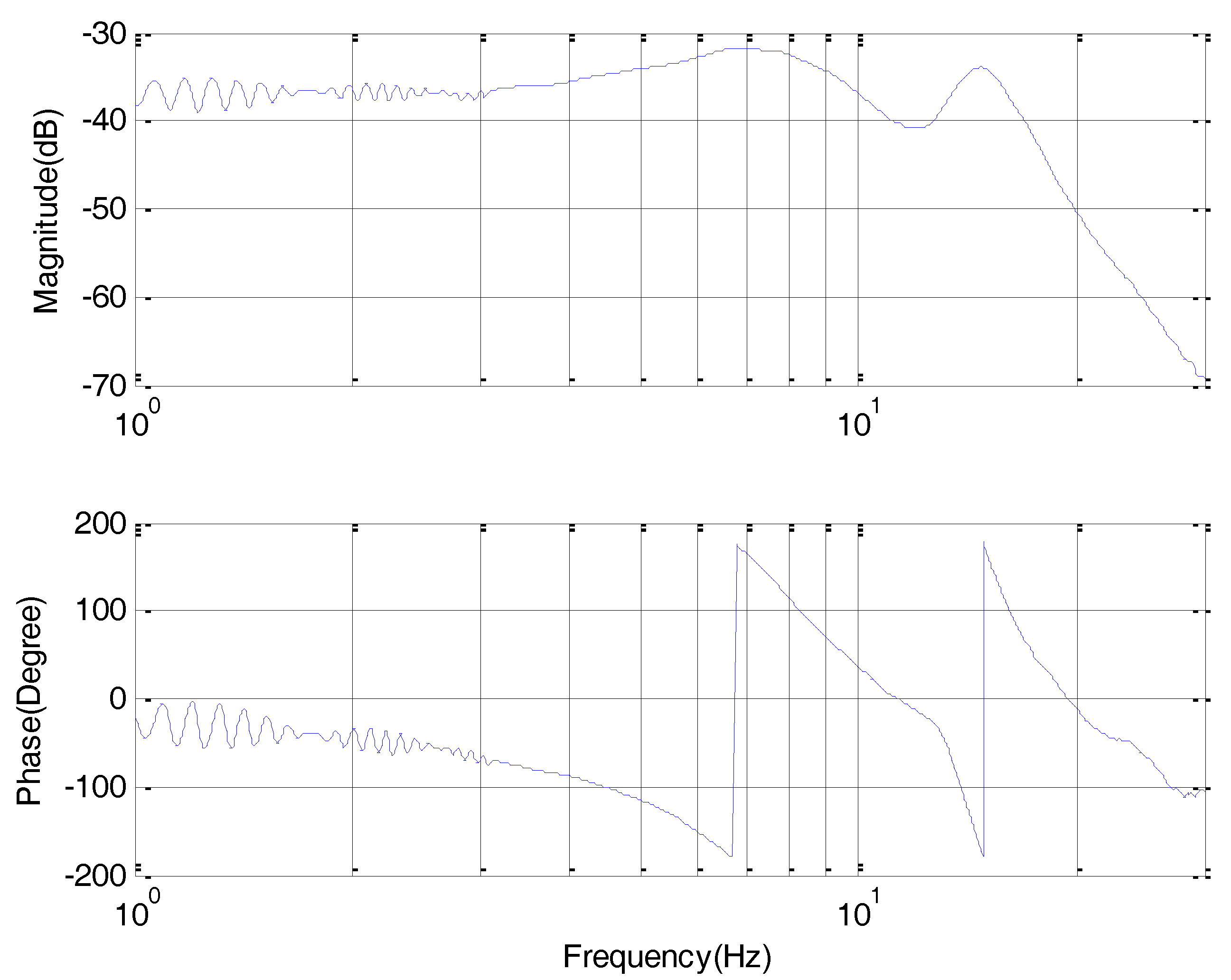
5. Experimental Setup
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akbari, M.; Kheibari, H.Z.; Nejad, A.S.M. Timing belt gearbox in Ballbot robot. In Proceedings of the First RSI/ISM International Conference on Robotics and Mechatronics, Tehran, Iran, 13–15 February 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 431–436. [Google Scholar]
- Keller, J. Gearbox Reliability Collaborative: Gearbox 3 Manufacturing Status. In Proceedings of the NREL (National Renewable Energy Laboratory), Gearbox Reliability Collaborative All-Members Meeting, Boulder, Colorado, 17 February 2015. [Google Scholar]
- Mousavi, A.; Akbarzadeh, A.; Shariatee, M. Salman Alimardani Repeatability analysis of a SCARA robot with planetary gearbox. In Proceedings of the 3rd RSI International Conference on Robotics and Mechatronics, Tehran, Iran, 7–9 October 2015; IEEE: Piscataway, NJ, USA, 2016; pp. 640–644. [Google Scholar]
- Mcfadden, S.; Basu, B. Wind turbine gearbox design with drivetrain dynamic analysis. In Offshore Wind Farms; Elsevier Ltd.: Amsterdam, The Netherlands, 2016; pp. 137–158. [Google Scholar]
- Lemmer, L.; Kiss, B. Modeling, Identification, and control of Harmonic Drives for Mobile Vehicles. In Proceedings of the IEEE Conference on Mechatronics, Budapest, Hungary, 3–5 July 2006; pp. 369–374. [Google Scholar]
- Sensinger, J.W.; Weir, R.F. Improved torque fidelity in harmonic drive sensors through the union of two existing strategies. IEEE/ASME Trans. Mechatron. 2006, 11, 457–461. [Google Scholar] [CrossRef]
- Zhang, H.; Ahmad, S.; Liu, G. Modeling of Torsional Compliance and Hysteresis Behaviors in Harmonic Drives. IEEE/ASME Trans. Mechatron. 2015, 20, 178–185. [Google Scholar] [CrossRef]
- Zhao, Z.; Xie, W.; Zhu, W. Fuzzy Optimal Control for Harmonic Drive System with Friction Variation with Temperature. In Proceedings of the International Conference on Mechatronics and Automation (ICMA), Harbin, China, 5–8 August 2007; pp. 3321–3326. [Google Scholar]
- Márton, L.; Lantos, B. Control of mechanical systems with Stribeck friction and backlash. Syst. Control Lett. 2009, 58, 141–147. [Google Scholar] [CrossRef]
- Nordin, M.; Gutman, P.O. Controlling mechanical systems with backlash—A survey. Automatica 2002, 38, 1633–1649. [Google Scholar] [CrossRef]
- Robertz, S.G.; Halt, L.; Kelkar, S.; Nilsson, K.; Robertsson, A.; Schår, D.; Schiffer, J. Precise robot motions using dual motor control. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 5613–5620. [Google Scholar]
- He, C.; Zhang, Y.; Meng, M. Backlash compensation by neuralnetwork online learning. In Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation, Banff, AB, Canada, 29 July–1 August 2001; pp. 161–165. [Google Scholar]
- Kobayashi, T.; Shimono, T.; Ohnishi, K. An experimental validation of haptic thrust wire for precise flexible actuation. In Proceedings of the 34th AnnualIEEE Conference of Industrial Electronics (IECON), Orlando, FL, USA, 10–13 November 2008; pp. 2503–2508. [Google Scholar]
- Yamada, S.; Fujimoto, H. Proposal of high backdrivable control using load-side encoder and backlash. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society (IECON 2016), Florence, Italy, 23–26 October 2016; pp. 6429–6434. [Google Scholar]
- Gebler, D.; Holtz, J. Identification and compensation of gear backlash without output position sensor in high-precision servo systems. In Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society (IECON ’98), Aachen, Germany, 31 August–4 September 1998; Volume 2, pp. 662–666. [Google Scholar]
- Merzouki, R.; Cadiou, J.C. Estimation of backlash phenomenon in the electromechanical actuator. Control Eng. Pract. 2005, 13, 973–983. [Google Scholar] [CrossRef]
- Kolnik, I.; Agranovich, G. Backlash compensation for motion system with elastic transmission. In Proceedings of the 2012 IEEE 27th Convention of Electrical and Electronics Engineers in Israel, Eilat, Israel, 14–17 November 2012. [Google Scholar]
- Prasanga, D.; Sariyildiz, E.; Ohnishi, K. Compensation of Backlash for Geared Drive Systems and Thrust Wires Used in Teleoperation. IEEJ J. Ind. Appl. 2015, 4, 514–525. [Google Scholar] [CrossRef]
- Hilkert, J.M. Inertially stabilized platform technology Concepts and principles. IEEE Control Syst. Mag. 2008, 28, 26–46. [Google Scholar] [CrossRef]
- Kempf, C.J.; Kobayashi, S. Disturbance observer and feedforward design for a high-speed direct-drive positioning table. IEEE Trans. Control Syst. Technol. 1999, 7, 513–526. [Google Scholar] [CrossRef]
- Kim, B.K.; Chung, W.K. Advanced disturbance observer design for mechanical positioning systems. IEEE Trans. Ind. Electron. 2003, 50, 1207–1216. [Google Scholar]
- Garg, A.; Li, J.; Hou, J.; Berretta, C.; Garg, A. A New Computational Approach for Estimation of Wilting Point for Green Infrastructure. Measurement 2017, 111, 351–358. [Google Scholar] [CrossRef]
- Huang, Y.; Gao, L.; Yi, Z.; Tai, K.; Prapainainar, P.; Garg, A. An Application of Evolutionary System Identification Algorithm in modelling of Energy Production System. Measurement 2017, 114, 122–131. [Google Scholar] [CrossRef]
- Garg, A.; Vijayaraghavan, V.; Zhang, J.; Li, S.; Liang, X. Design of robust battery capacity model for electric vehicle by incorporation of uncertainties. Int. J. Energy Res. 2017, 41, 1436–1451. [Google Scholar] [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, T.; Chen, S.; Huang, X.; Yang, T.; Qi, B. Combining Load and Motor Encoders to Compensate Nonlinear Disturbances for High Precision Tracking Control of Gear-Driven Gimbal. Sensors 2018, 18, 754. https://doi.org/10.3390/s18030754
Tang T, Chen S, Huang X, Yang T, Qi B. Combining Load and Motor Encoders to Compensate Nonlinear Disturbances for High Precision Tracking Control of Gear-Driven Gimbal. Sensors. 2018; 18(3):754. https://doi.org/10.3390/s18030754
Chicago/Turabian StyleTang, Tao, Sisi Chen, Xuanlin Huang, Tao Yang, and Bo Qi. 2018. "Combining Load and Motor Encoders to Compensate Nonlinear Disturbances for High Precision Tracking Control of Gear-Driven Gimbal" Sensors 18, no. 3: 754. https://doi.org/10.3390/s18030754
APA StyleTang, T., Chen, S., Huang, X., Yang, T., & Qi, B. (2018). Combining Load and Motor Encoders to Compensate Nonlinear Disturbances for High Precision Tracking Control of Gear-Driven Gimbal. Sensors, 18(3), 754. https://doi.org/10.3390/s18030754