Application of Improved 5th-Cubature Kalman Filter in Initial Strapdown Inertial Navigation System Alignment for Large Misalignment Angles


Abstract
:1. Introduction
2. Nonlinear Model of Initial Alignment with Large Misalignment Angle
3. CKF5 and Improved CKF5
3.1. CKF5 Algorithm
- Let be the estimated state at time and decompose with Cholesky’s method:
- Compute cubature points:where and .
- Compute the predicted mean and predicted covariance :where , , and is system noise covariance matrix.
- 4.
- Decompose with Cholesky’s method:
- 5.
- Compute cubature points:
- 6.
- Compute the estimated measurement , the gain matrix and the covariance matrixes of , :
- 7.
- Update and :where is the measurement at time .
3.2. Improved CKF5 Algorithm
- (1)
- Input the initial values for filtering: .
- (2)
- Compute cubature points according to Equation (26).
- (3)
- Compute the predicted mean and predicted covariance according to Equations (27) and (28), respectively.
- (4)
- Scaling the entire : .
- (5)
- Decompose with the SVD method.
- (6)
- Compute cubature points according to Equation (30).
- (7)
- Compute the estimated measurement , the gain matrix and the covariance matrixes of , according to Equations (31)–(34), respectively.
- (8)
- Update , and according to Equations (35), (36) and (44), respectively.
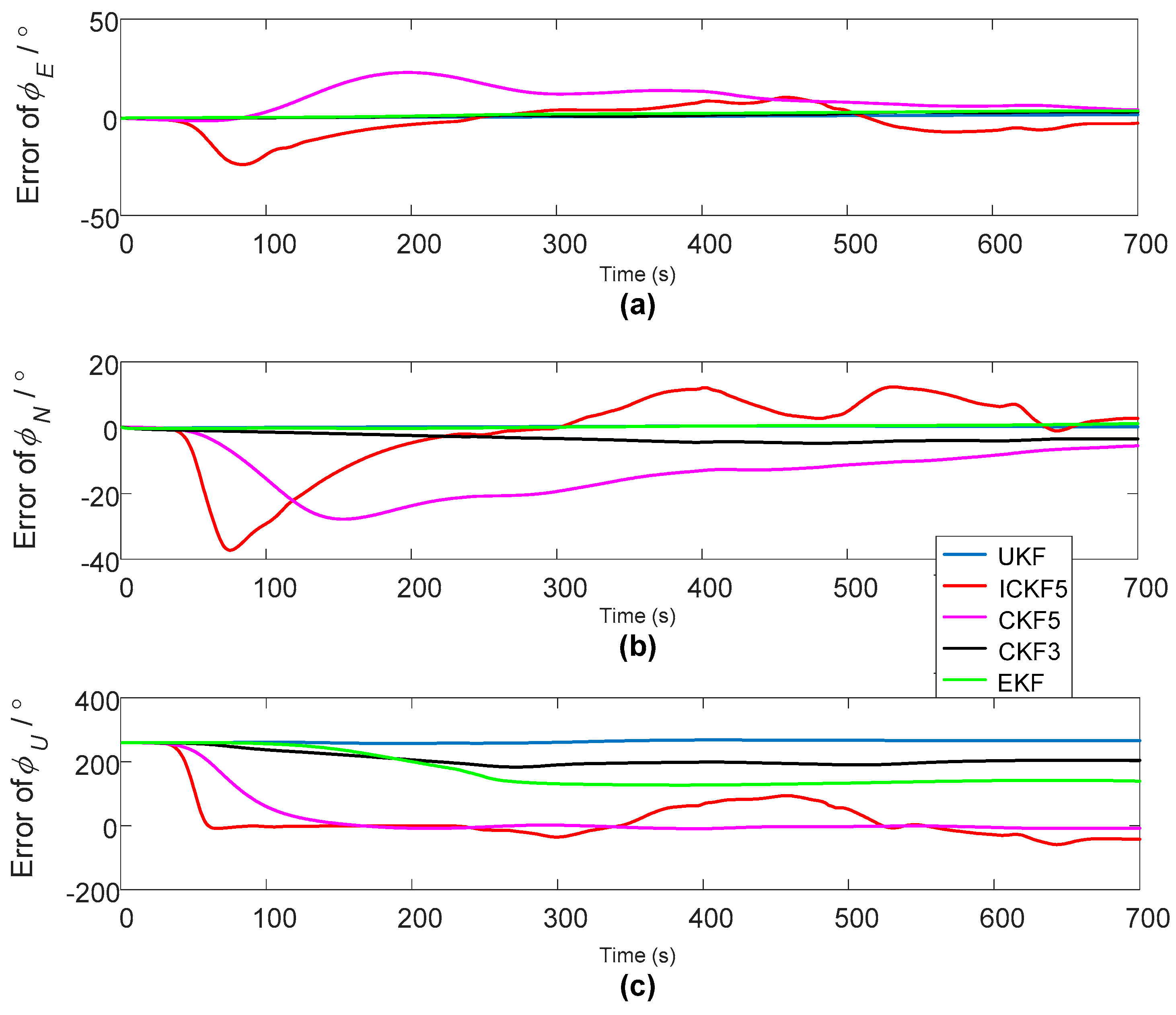
3.3. Simulation and Its Analysis
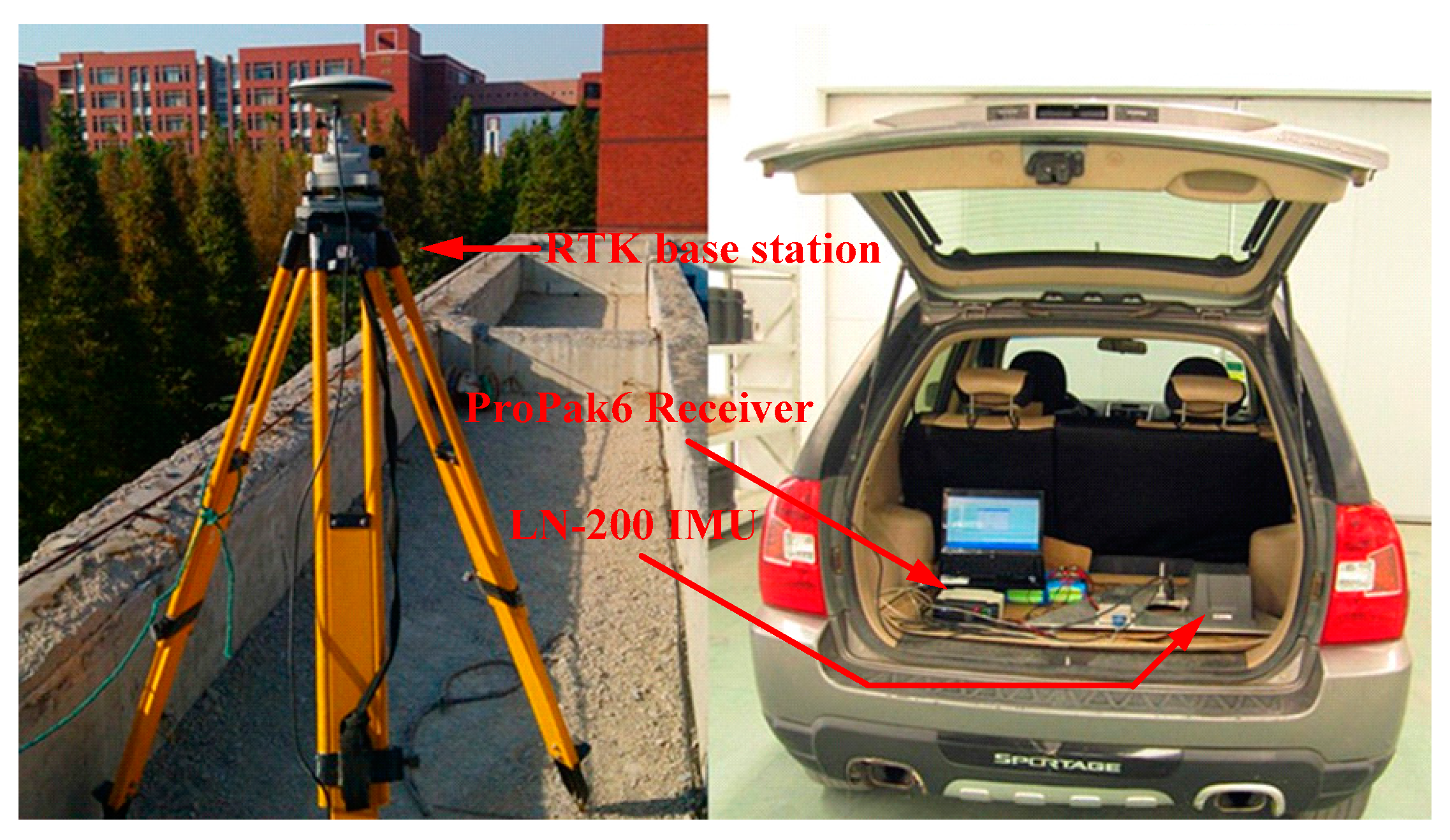
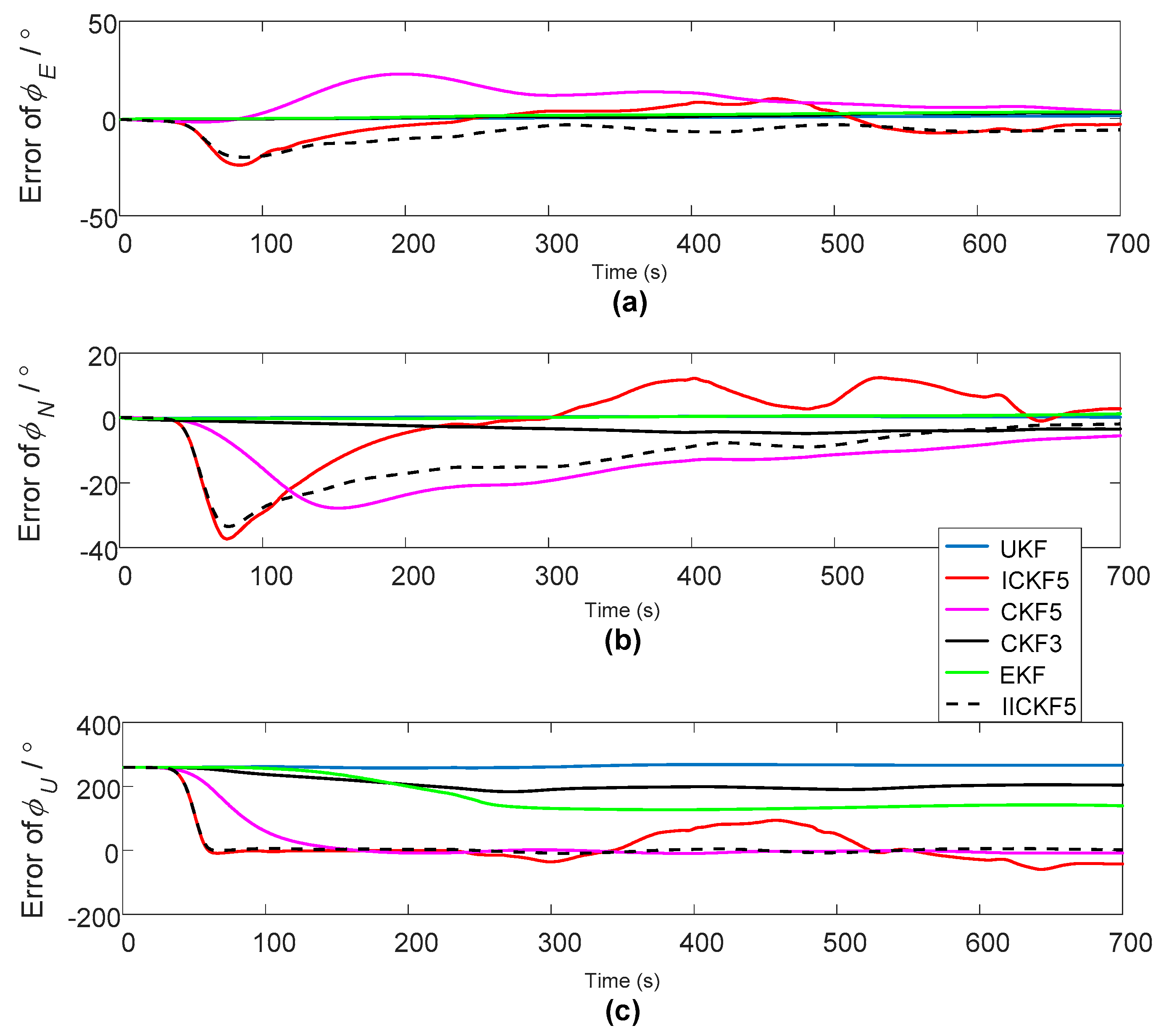
4. Dynamic Vehicle Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dmitriyev, S.P.; Stepanov, O.A.; Shepel, S.V. Nonlinear filtering methods application in INS alignment. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 260–271. [Google Scholar] [CrossRef]
- Chang, L.B.; Hu, B.Q.; Li, A.; Qin, F.J. Strapdown inertial navigation system alignment based on marginalized unscented Kalman filter. IET Sci. Meas. Technol. 2013, 7, 128–138. [Google Scholar] [CrossRef]
- Li, H.; Pan, Q.; Wang, X.; Jiang, X.; Deng, L. Kalman Filter Design for Initial Precision Alignment of a Strapdown Inertial Navigation System on a Rocking Base. J. Navig. 2015, 68, 184–195. [Google Scholar] [CrossRef]
- Hao, Y.L.; Mu, H.W.; Jia, H.M. Application of ICDKF in initial alignment of large azimuth misalignment in SINS. Syst. Eng. Electron. 2013, 35, 152–155. [Google Scholar]
- Chatzi, E.N.; Smyth, A.W. The unscented Kalman filter and particle filter methods for nonlinear structural system identification with non-collocated heterogeneous sensing. Struct. Control Health Monit. 2009, 16, 99–123. [Google Scholar] [CrossRef]
- Cox, H. On the estimation of state variables and parameters for noisy dynamic systems. IEEE Trans. Autom. Control 1964, 9, 5–12. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L. Unscented filtering for spacecraft attitude estimation. J. Guid. Control Dyn. 2003, 26, 536–542. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlman, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. In Proceedings of the IEEE American Control Conference, Seattle, WA, USA, 21–23 June 1995; pp. 1628–1632. [Google Scholar]
- Uchiyama, S.; Takemoto, K.; Satoh, K.; Yamamoto, H.; Tamura, H. MR Platform: A basic body on which mixed reality applications are built. In Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR 2002), Washington, DC, USA, 30 September–1 October 2002; pp. 248–256. [Google Scholar]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Sun, F.; Tang, L.J. Initial alignment of large azimuth misalignment angle in SINS based on CKF. Chin. J. Sci. Instrum. 2012, 33, 327–333. [Google Scholar]
- Zhang, Y.G.; Huang, Y.L.; Wu, Z.M.; Li, N. Moving state marine SINS initial alignment based on high degree CKF. Math. Probl. Eng. 2014, 2014, 546107. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M. Multiple sensor estimation using a new fifth-degree cubature information filter. Trans. Inst. Meas. Control 2015, 37, 15–24. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Huang, Y.L.; Li, N. SINS Initial Alignment Based on Fifth-degree Cubature Kalman Filter. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 4–7 August 2013; pp. 401–406. [Google Scholar]
- Xu, B.; Zhang, P.; Wen, H.; Wu, X. Stochastic stability and performance analysis of cubature Kalman filter. Neurocomputing 2016, 186, 218–227. [Google Scholar] [CrossRef]
- Ding, W.; Wang, J.; Rizos, C.; Kinlyside, D. Improving adaptive Kalman estimation in GPS/INS integration. J. Navigat. 2007, 60, 517–529. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Kalman-Consensus filter: Optimality, stability, and performance. In Proceedings of the 48th IEEE Conference on Decision and Control held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 7036–7042. [Google Scholar]
- Fang, J.; Yang, S. Study on Innovation Adaptive EKF for In-Flight Alignment of Airborne POS. IEEE Trans. Instrum. Meas. 2011, 60, 1378–1388. [Google Scholar]
- Sun, J.; Xu, X.S.; Liu, Y.T.; Zhang, T.; Li, Y. Initial Alignment of Large Azimuth Misalignment Angles in SINS Based on Adaptive UPF. Sensors 2015, 15, 21807–21823. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.Y.; Tang, X.Q.; Wu, M. Application of 5th-degree CKF in SINS nonlinear initial alignment. Syst. Eng. Electron. 2015, 37, 633–638. [Google Scholar]
- Yan, G.M.; Yan, W.S.; Xu, D.M. A SINS nonlinear error model reflecting better characteristics of SINS errors. J. Northwest. Polytech. Univ. 2009, 27, 511–516. [Google Scholar]
- Wu, Y.X.; Hu, D.W.; Wu, M.P.; Hu, X.P. A numerical-integration perspective on Gaussian filters. IEEE Trans. Signal Process. 2006, 54, 2910–2921. [Google Scholar] [CrossRef]
- Long, R.; Qin, Y.Y.; Jia, J.C. Observable degree analysis of SINS initial alignment based on singular value decomposition. In Proceedings of the 2008 IEEE International Symposium on Knowledge Acquisition and Modeling Workshop, Wuhan, China, 21–22 December 2008; pp. 444–448. [Google Scholar]
- Yan, G.M.; Yan, W.S. Application of simplified UKF in SINS initial alignment for large misalignment angles. J. Chin. Inert. Technol. 2008, 16, 253–264. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EKF | UKF | CKF3 | CKF5 | ICKF5 | IICKF5 | |
|---|---|---|---|---|---|---|
| error of pitch (°) | −7.0205 | 0.0899 | 0.1270 | 0.1590 | 0.0829 | 0.0291 |
| error of roll (°) | 7.8234 | −0.1464 | −0.1634 | −0.2078 | −0.2949 | −0.2738 |
| error of heading (°) | 62.7783 | 157.7361 | 61.2902 | 13.6403 | −1.2458 | −0.0878 |
| EKF | UKF | CKF3 | CKF5 | ICKF5 | IICKF5 | |
|---|---|---|---|---|---|---|
| error of pitch (°) | −3.2814 | −1.2868 | −2.6771 | −3.7189 | 3.0270 | 5.9149 |
| error of roll (°) | −1.2960 | −0.2867 | 3.3751 | 5.4245 | −2.9030 | 1.8357 |
| error of heading (°) | −139.5622 | −266.3212 | −204.3457 | 7.9986 | 42.5004 | −1.9540 |
| EKF | UKF | CKF3 | CKF5 | ICKF5 | IICKF5 | |
|---|---|---|---|---|---|---|
| Mean (°) | −155.2618 | −264.1352 | −201.1962 | 1.6920 | −6.1625 | −0.6852 |
| SD (°) | 38.8935 | 3.8062 | 11.5359 | 10.2307 | 41.2056 | 4.6229 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Chen, X. Application of Improved 5th-Cubature Kalman Filter in Initial Strapdown Inertial Navigation System Alignment for Large Misalignment Angles. Sensors 2018, 18, 659. https://doi.org/10.3390/s18020659
Wang W, Chen X. Application of Improved 5th-Cubature Kalman Filter in Initial Strapdown Inertial Navigation System Alignment for Large Misalignment Angles. Sensors. 2018; 18(2):659. https://doi.org/10.3390/s18020659
Chicago/Turabian StyleWang, Wei, and Xiyuan Chen. 2018. "Application of Improved 5th-Cubature Kalman Filter in Initial Strapdown Inertial Navigation System Alignment for Large Misalignment Angles" Sensors 18, no. 2: 659. https://doi.org/10.3390/s18020659
APA StyleWang, W., & Chen, X. (2018). Application of Improved 5th-Cubature Kalman Filter in Initial Strapdown Inertial Navigation System Alignment for Large Misalignment Angles. Sensors, 18(2), 659. https://doi.org/10.3390/s18020659