Optimized Sensor Network and Multi-Agent Decision Support for Smart Traffic Light Management




Abstract
1. Introduction
2. Related Work
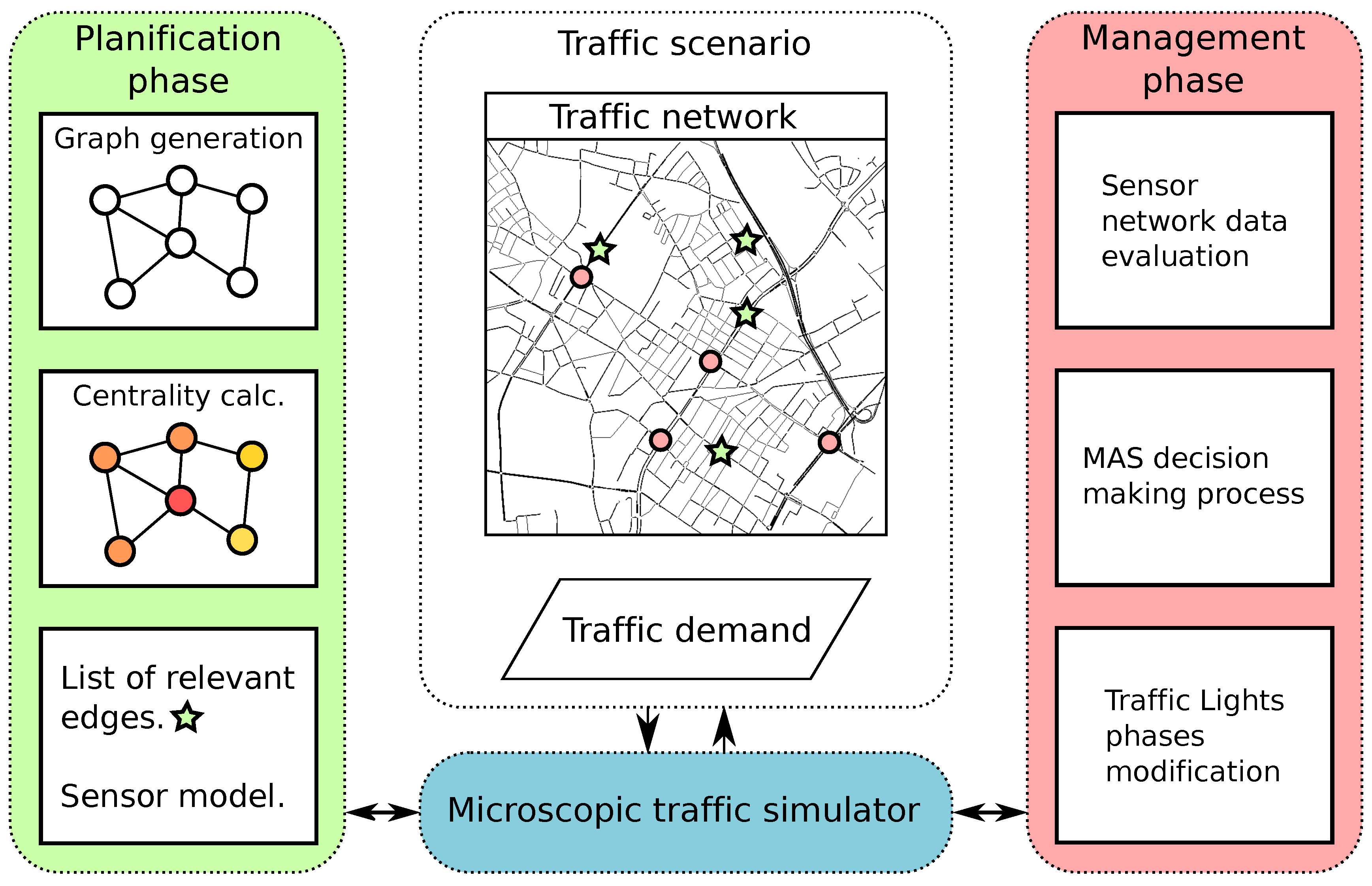
3. Design and Optimization of a Sensor Network for ITS
3.1. ITS Sensor Classification and Simulation Models
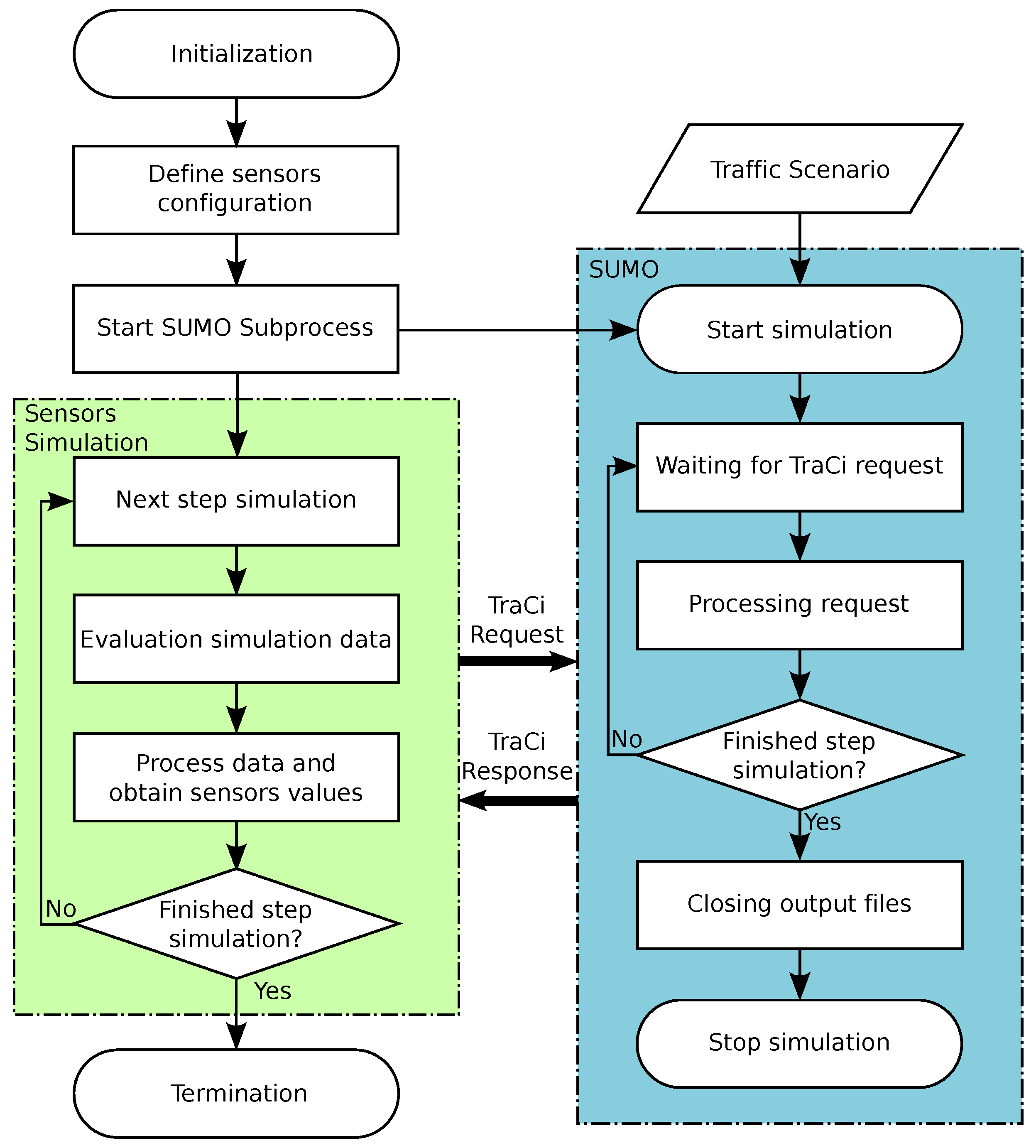
- System initialization: The application reads the data from the scenario, initializes the sensor configuration, including the definition of its features, and launches a subprocess that starts the SUMO simulator.
- Loop until end of the simulation: There is a parameter in the application configuration that states the duration in seconds of each simulation step. The sensor simulation module will perform the following tasks including requests to the simulation module (via TraCI):
- (a)
- Requests one step simulation and then waits for the end of the step,
- (b)
- Requests the current parameters of each vehicle that was active in that step of simulation and the edge information,
- (c)
- Processes the information, and models it for the specific sensors,
- (d)
- Returns the values generated for the sensor,
- End of the simulation.
3.2. Sensor Location Proposal
- : List of edges ordered by their centrality value. Obtained following the next steps:
- (a)
- Transformation of the traffic network in a directed graph (G):where V is the set of network nodes and E is the set of network edges.
- (b)
- Calculation of the betweenness centrality of G. There are implementations that allow to calculate the betweenness centrality of the edges of the graph [40]. Another option would be to transform the directed graph G into a Line-graph (), in which the nodes are constituted by the edges of G and the edges are the possible turns from one edge to other in the original graph [41]:where is E from G and is the set composed by the possible turns from one edge to other in G. We obtain the centrality measurement of in the set :Applying Equation (4) in Equation (5):where is each of the n elements in E (set of edges of the original graph G) and is the centrality value of .
- (c)
- is obtained from the ordination of the set from the highest to the lowest centrality value, and the normalization of the centrality values over 1.
- : List of edges ordered by their historical occupation level. Obtained following the next steps:
- (a)
- Obtaining of the historical traffic values. These values might be already grouped or might be a traffic model that should be simulated to obtain numerical values. We define as:where is each of the n elements in E and is the historical occupation value for .
- (b)
- is obtained from the ordination of the set from the highest to the lowest historical occupation value, and the normalization of the historical occupation values over 1.
- : List obtained using the combination of and , and using a reliability factor for the historical values ():
- (a)
- is a value between 0 and 1 that measures the reliability level of the historical data, where 1 would be the closest possible value to the real-life one.
- (b)
- Ordination of from the highest to the lowest value.

4. Multi-Agent System for Intelligent Traffic Light Management
4.1. Agents
4.1.1. “TLAgent” Traffic Light Management Agent
- Description: This kind of agent is defined for the traffic light phases’ changing management. It will be aware of the other agents of the same type in the intersection.
- Location: Each traffic light in each intersection of the network will be provided with one of these agents.
- Behavior: In an initial state, the traffic light changes will follow a static predefined pattern. Once the agent receives a message indicating a change, it will reconfigure the phases accordingly. The changes will always be performed within a given maximum and minimum time thresholds.
4.1.2. “TJamAgent” Traffic Jam Detection Agent
- Description: These agents are in charge of obtaining data from their environment and then making a decision about the traffic state, with the ultimate goal of communicating a possible traffic jam in their surroundings.
- Location: These agents are deployed across the sensor network. They can be located both in sensors installed in the network or aboard sensors embedded in the vehicles that transit through it.
- Behavior: Agents located in vehicles will base their decision on the data provided by sensors (specifically, the geographic position and instantaneous velocity of the vehicle). A threshold will be defined for this data, and once the sensors provide higher values than expected for a period, the agent will consider a traffic jam situation and notify it. The sensors installed in the network will make the decision using the same mechanism, but relying on different types of data depending on the type of sensor installed.
4.1.3. “IntersectionAgent”
- Description: These agents are the ones that decide how the traffic lights of an intersection should be changed. They receive messages from the TLAgents near them, and then decide which traffic flow in the intersection should be prioritized.
- Location: They can be located anywhere within the communications coverage of the TLAgents of each intersection.
- Behavior: Using the current state of the TLAgents they control (the specific number of agents will depend on the number of lanes ending in the intersection) and information from TJamAgents, they will perform a decision-making process based on a state machine. The decisions will be sent again to the TLAgents. These agents are also communicating between them and they can operate in two modes regarding these communications:
- -
- Altruistic or Collaborative: This mode allow agents to listen to requests from other agents of the same type. The information given by the other IntersectionAgents will be added to the information obtained from the TJamAgents to make a more informed decision on how to prioritize flows.
- -
- Selfish or Isolated: The agents enter this mode when they determine that the zone that they are managing is much too congested and therefore they should make their own decisions instead of pursuing a global cooperative goal. Once in this mode, the agents will ignore any message from other IntersectionAgents until the congestion is lower or a defined timer expires. This timer is set to avoid system blocking if the agents stay too much time in this mode.
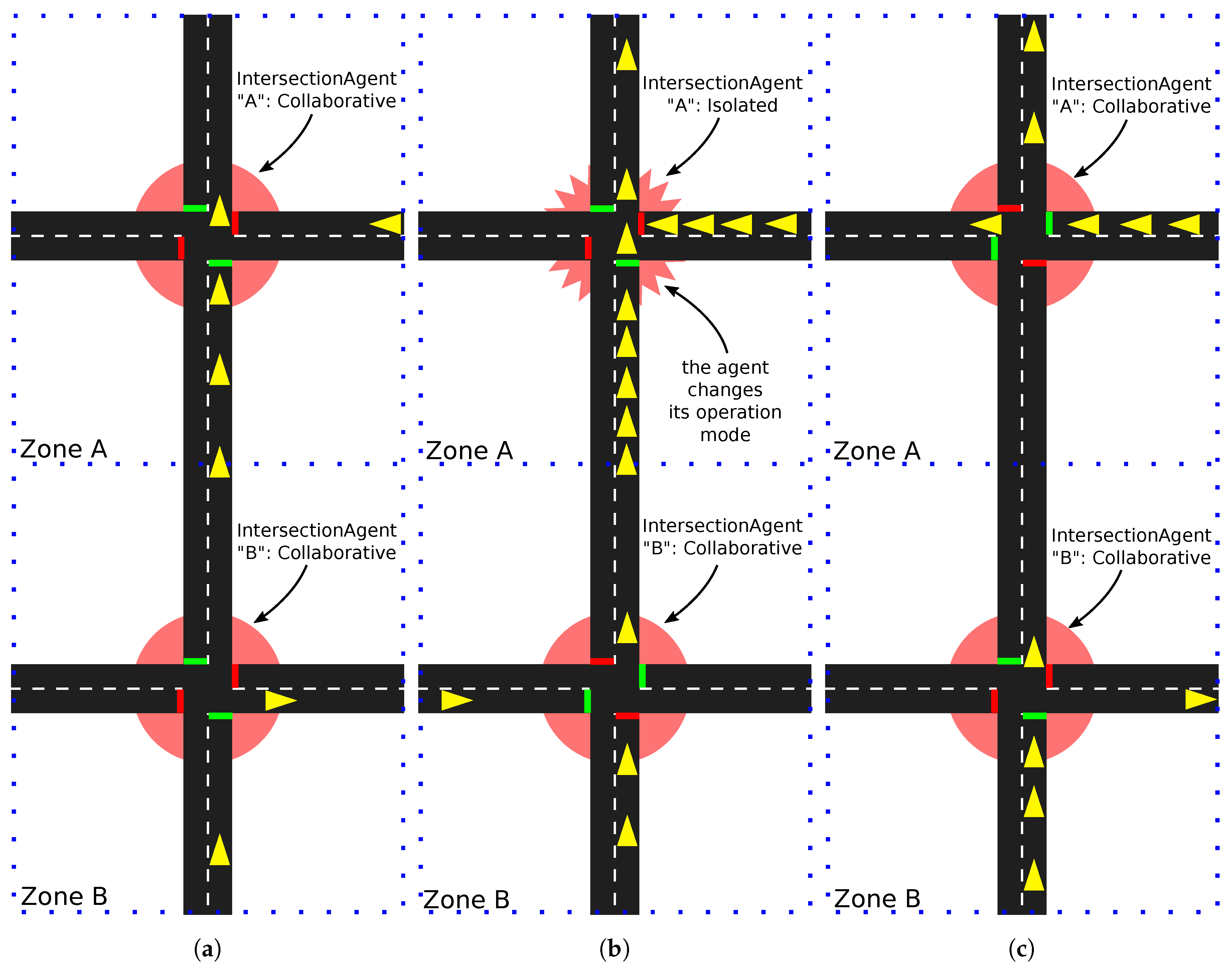
4.2. MAS Behaviour
- Initial state (Figure 3a): Both IntersectionAgents (“A” and “B”) will begin their operations in altruistic mode. This means that they will exchange information to help each other.The vehicles in the vertical traffic flow inside the zone “A” circulate at a speed below the optimal in that road. Therefore, the TJamAgent included in each one, will report a possible traffic jam situation to IntersectionAgent of the zone “A”.Once the IntersectionAgent collects the information from the TJamAgents in its zone, it starts the decision-making process and finally decides to prioritize the vertical traffic flow. The actions performed by the agent are: sending the new phases configuration to the TLAgents in the intersection, and advertising the changes to the nearby IntersectionAgents (in this case, the agent in zone“B”) to maintain the synchronization of the adjacent intersections.
- Zone “A” Congested (Figure 3b): Once an IntersectionAgent determines it is in a blocking situation due to a very high traffic volume, it changes its behavior by entering selfish mode. In this example, the IntersectionAgent in zone “A” determines that all the vehicles that are entering the intersection are blocked. Because of this, it enters selfish mode and stops using the information received from the nearby IntersectionAgents (in this case, the agent in zone “B”).The actions performed by the agent are: Ir requests the IntersectionAgent in “B” to limit the vertical traffic flow (the IntersectionAgent in “B” will acknowledge this request because it is in altruistic mode yet), and then it sends the new phases configuration to the TLAgents in the intersection.
- Zone “A” normal flow (Figure 3c): The decisions taken by the IntersectionAgent in the previous case have been successful, and, therefore, the congestion situation is over. This allows the IntersectionAgent in zone “A” to change back its behavior to altruistic mode. Now, the vertical traffic flow in the zone “B” is higher than before. This is because of the traffic light phase duration changes performed in “B” to help the IntersectionAgent in “A”. Once the blocking state is solved, the phases duration can be reverted to the best possible values for intersection “B”.
5. Results
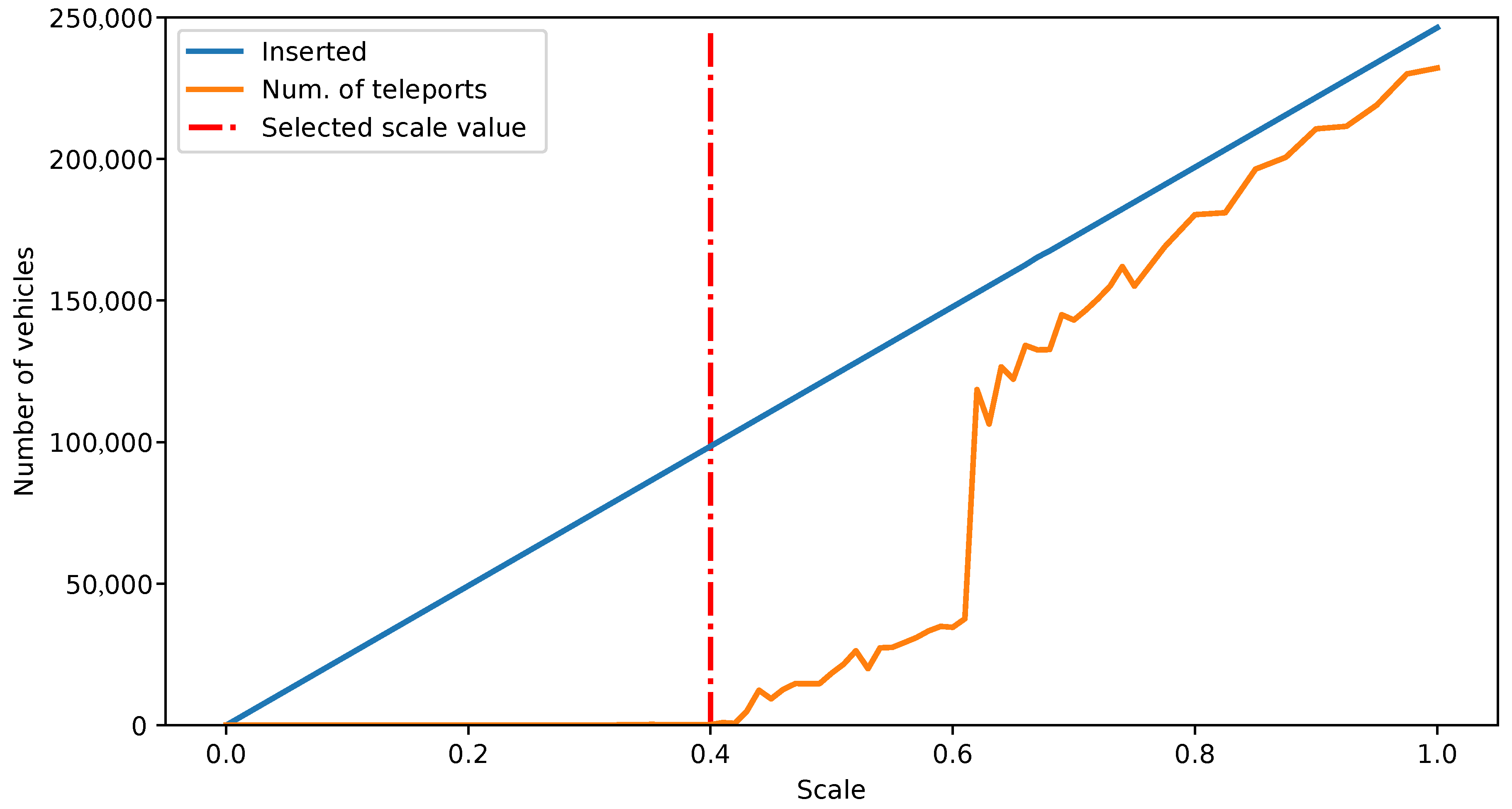
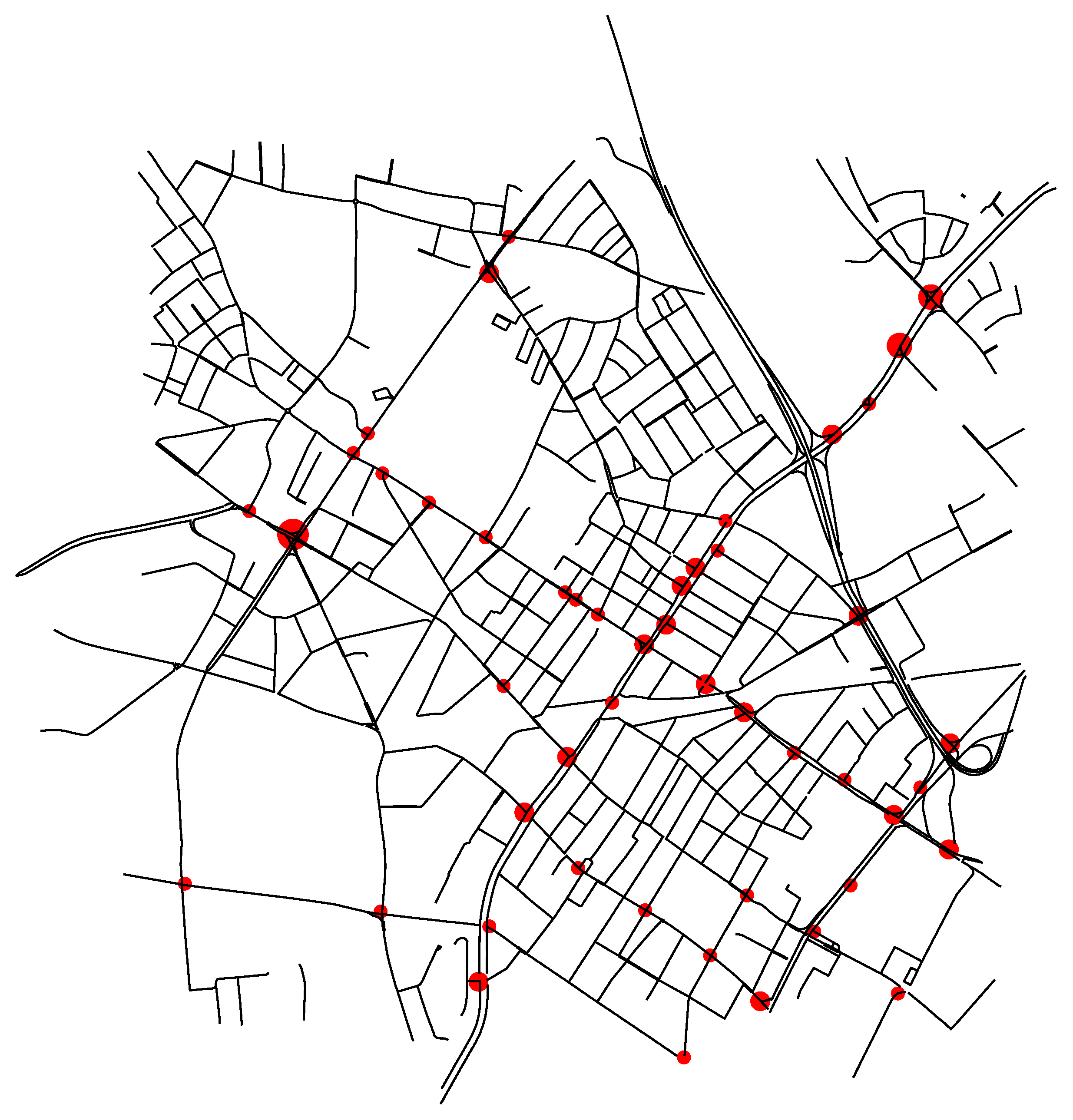
5.1. Simulation Scenario
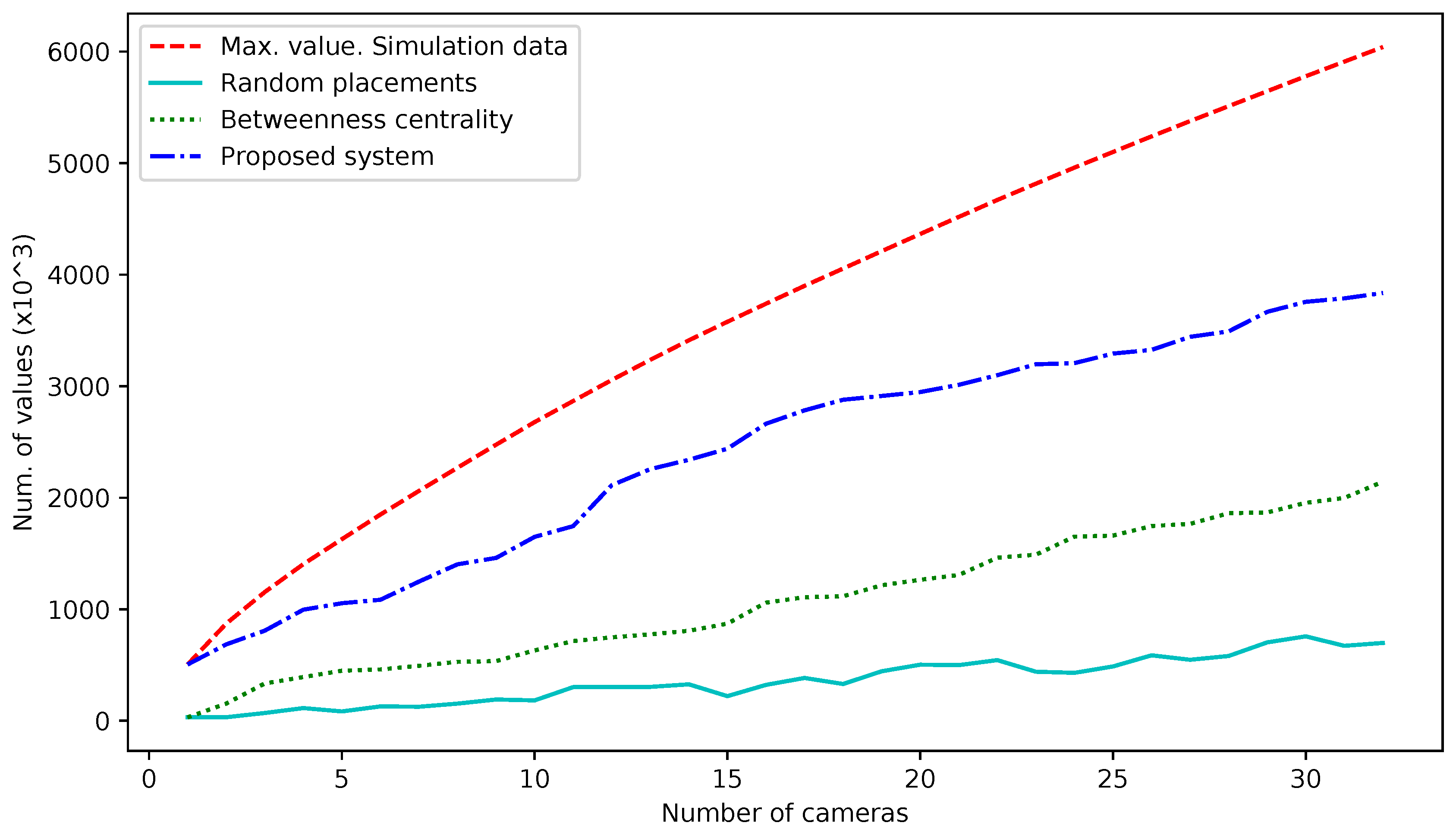
5.2. Sensor Network Optimization Experiments
- Max. value (Simulation data): A simulation is carried out, and the position of every vehicle is stored in each simulation step (setting simulation step to 1s). If an edge is longer than 120 m, the edge is divided in sub-edges, so the limit of the camera vision is not surpassed. We use a counter for each edge (or sub-edge), and it is incremented each time there is a vehicle located in it. At the end of the simulation, we get a list of edges ordered by the occupation level.
- Random locations: In this experiment, we have simulated the results of applying a random location selection for sensors. We have selected from 1 to 32 random locations, and then we have obtained the results of the simulation. This process has been repeated 10 times, choosing new random locations each time. Once finished, the resultant values are the result of calculating the average value for the 10 repetitions.
- Betweenness centrality: Using the SUMO libraries, the network is loaded in the computer memory and then transformed into a graph using the NetworkX library. This directed graph is then transformed into a line-graph and then the “betweenness_centrality” is applied. Using the resulting list, we carry out a set of simulations where we place from 1 to 32 cameras in the places indicated by the first positions of the list. Then, we store the number of vehicles that were counted by the cameras.
- Proposed system: The process followed in order to obtain the betweenness centrality list is repeated. Then, we create a list with historical traffic data (we use the results of a previous simulation) and then we generate a list that combines both using an factor equal to 0.5.
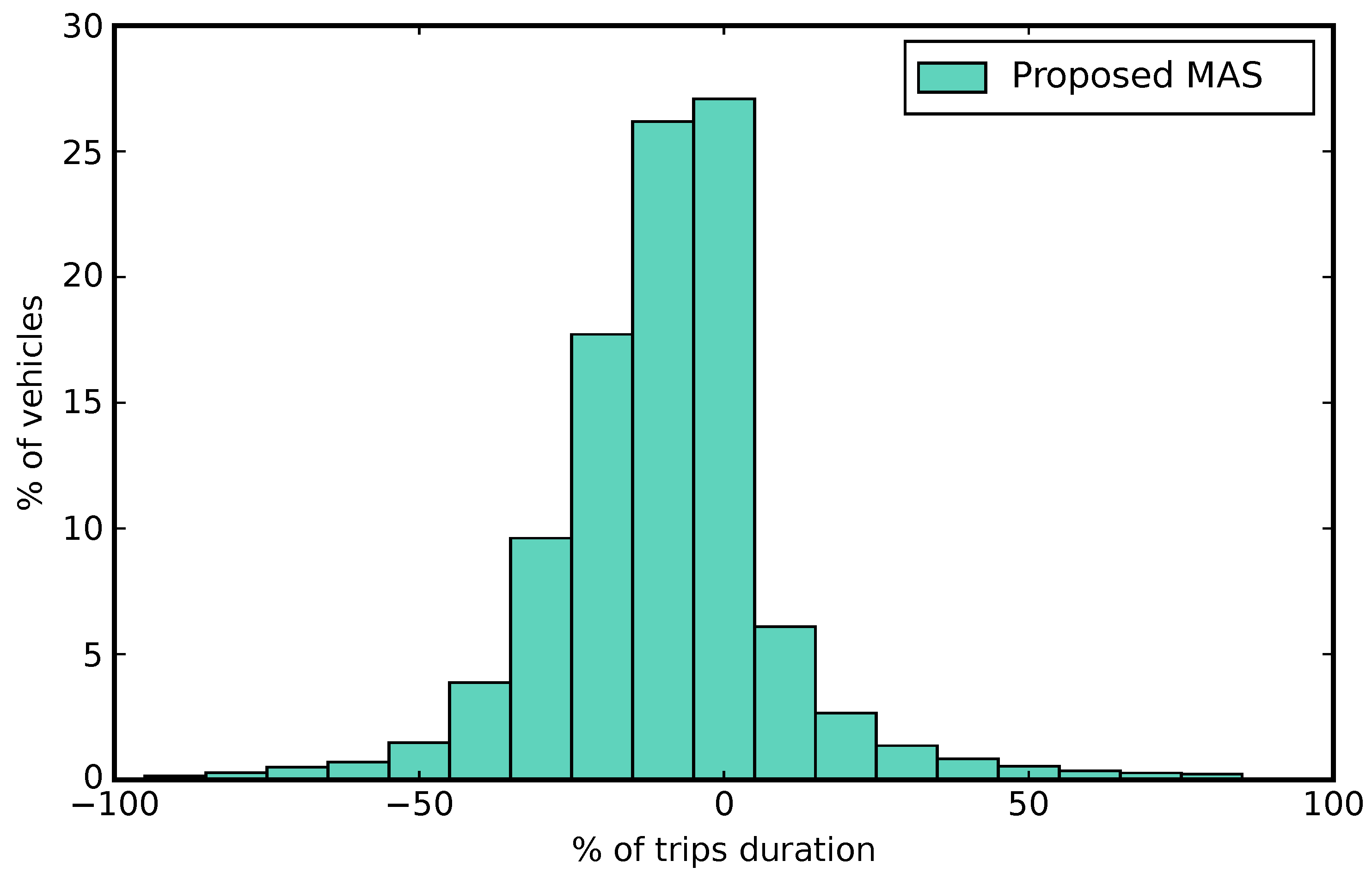
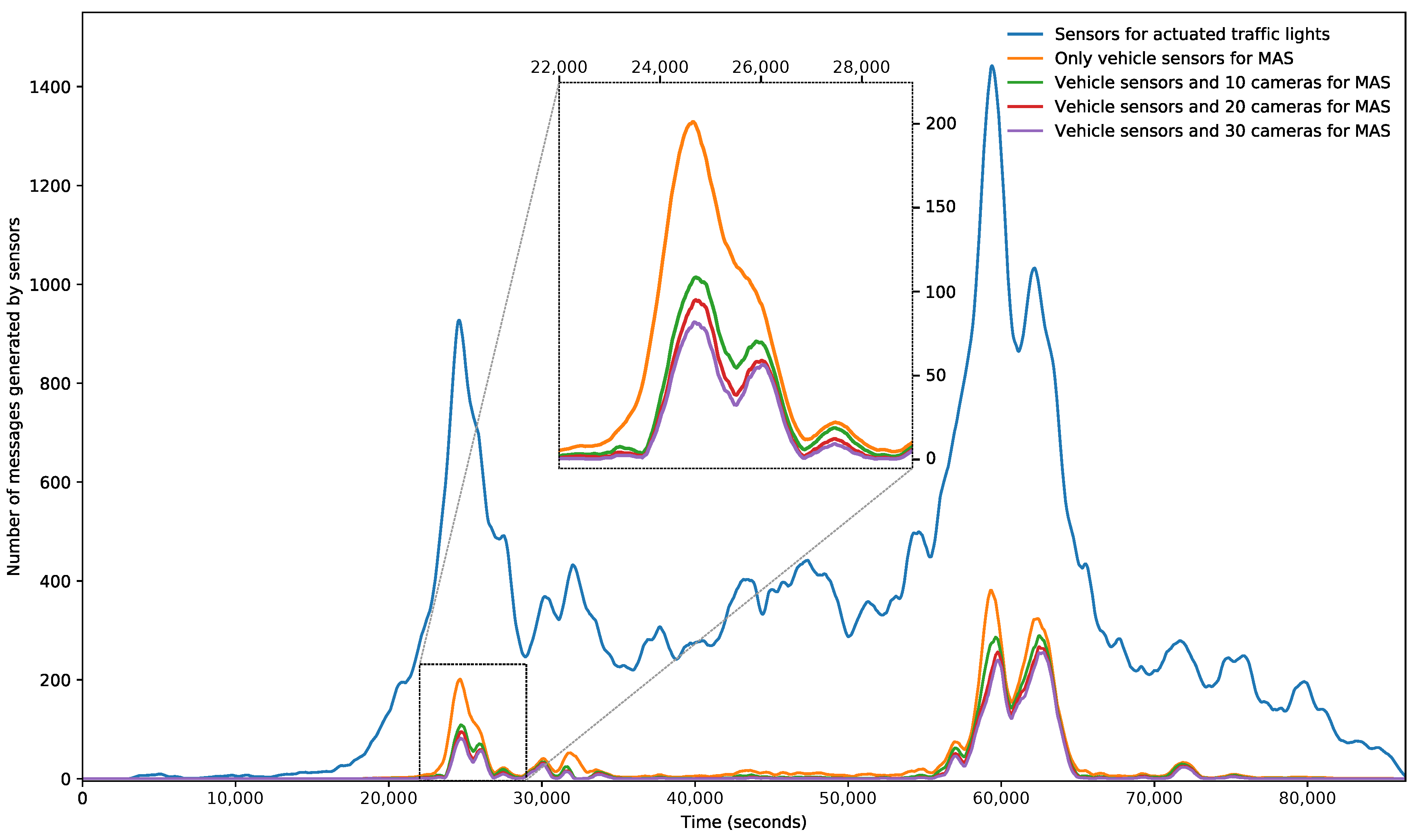
5.3. MAS Traffic Light Management Experiments
- Static phases: In this experiment, we use the default TAPAS scenario configuration. The TAPAS traffic network defines a set of static phases for traffic lights in each one of its intersections. These phases do not change during the simulations. There are no sensors deployed in the network.
- Actuated traffic lights: This kind of traffic lights management is based on the location of sensors in a fixed distance to intersections. The traffic lights phases change depending on the information received from these sensors. We use in this experiment the SUMO traffic simulator actuated traffic lights feature, included among the network configuration possibilities. In this case, there are induction loop sensors deployed in the network at a fixed distance from each intersection controlled by traffic lights. These sensors send a message each time a vehicle activates them by passing over.
- Proposed MAS: We integrate the proposed MAS into SUMO to change the traffic lights phases dynamically during the simulation. When a camera sensor is deployed, it monitors the vehicles in its coverage area. If traffic jams are detected in that area, it sends a message. In addition, every vehicle in the system emulates a GPS sensor. If the velocity of the vehicle is less than half of the minimum between its maximum velocity and the maximum velocity of the road, it sends a message, notifying the situation. Note that, when the vehicle is in the coverage area of a camera sensor, it will not notify the situation, relying on the camera information.
6. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ACTAM | Adaptive and Cooperative Traffic light Agent Model |
| ARLM | Arterial Road Location Method |
| ATMS | Advanced Traffic Management Systems |
| EA | Evolutionary Algorithms |
| GA | Genetic Algorithm |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| ITS | Intelligent Transportation Systems |
| MAS | Multi-Agent Systems |
| NSLP | Network Sensor Location Problem |
| O-D | Origin-Destination |
| PSO | Particle Swarm Optimization |
| RRLM | Random Road Location Method |
| SUMO | Simulation of Urban MObility |
| TAPAS | Travel and Activity PAtterns Simulation |
| TCP | Transmission Control Protocol |
| TIS-DLR | Institute of Transportation Systems at the German Aerospace Center |
| TraCI | Traffic Control Interface |
| WSN | Wireless Sensor Networks |
References
- Cruz-Piris, L.; Rivera, D.; Marsa-Maestre, I.; de la Hoz, E.; Fernandez, S. Intelligent Traffic Light Management using Multi-Behavioral Agents. In Proceedings of the XIII Jornadas de Ingeniería Telemática (JITEL 2017), Valencia, Spain, 27–29 September 2017. [Google Scholar]
- Lee, W.H.; Tseng, S.S.; Wang, C.H. Design and implementation of electronic toll collection system based on vehicle positioning system techniques. Comput. Commun. 2008, 31, 2925–2933. [Google Scholar] [CrossRef]
- Qi, L. Research on intelligent transportation system technologies and applications. In Proceedings of the PEITS’08 Workshop on Power Electronics and Intelligent Transportation System, Guangzhou, China, 2–3 August 2008; pp. 529–531. [Google Scholar]
- Messelodi, S.; Modena, C.M.; Zanin, M.; De Natale, F.G.; Granelli, F.; Betterle, E.; Guarise, A. Intelligent extended floating car data collection. Expert Syst. Appl. 2009, 36, 4213–4227. [Google Scholar] [CrossRef]
- Chen, S.; Chen, F.; Liu, J.; Wu, J.; Bienkiewicz, B. Mobile mapping technology of wind velocity data along highway for traffic safety evaluation. Transp. Res. Part C Emerg. Technol. 2010, 18, 507–518. [Google Scholar] [CrossRef]
- Jun, J.; Guensler, R.; Ogle, J. Differences in observed speed patterns between crash-involved and crash-not-involved drivers: Application of in-vehicle monitoring technology. Transp. Res. Part C Emerg. Technol. 2011, 19, 569–578. [Google Scholar] [CrossRef]
- Qin, X.; Khan, A.M. Control strategies of traffic signal timing transition for emergency vehicle preemption. Transp. Res. Part C Emerg. Technol. 2012, 25, 1–17. [Google Scholar] [CrossRef]
- Smith, H.R.; Hemily, B.; Ivanovic, M. Transit Signal Priority (TSP): A Planning and Implementation Handbook; ITS America: Washington, DC, USA, 2005; pp. 529–531. [Google Scholar]
- Davey, E. Rail traffic management systems (TMS). In Proceedings of the IET Professional Development Course on Railway Signalling and Control Systems (RSCS), London, UK, 21–24 May 2012; pp. 126–143. [Google Scholar]
- Nellore, K.; Hancke, G.P. A Survey on Urban Traffic Management System Using Wireless Sensor Networks. Sensors 2016, 16, 157. [Google Scholar] [CrossRef] [PubMed]
- Faye, S.; Chaudet, C. Characterizing the topology of an urban wireless sensor network for road traffic management. IEEE Trans. Veh. Technol. 2016, 65, 5720–5725. [Google Scholar] [CrossRef]
- Zhou, B.; Cao, J.; Zeng, X.; Wu, H. Adaptive traffic light control in wireless sensor network-based intelligent transportation system. In Proceedings of the 72nd Vehicular Technology Conference Fall (VTC 2010-Fall), Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5. [Google Scholar]
- Yousef, K.M.; Al-Karaki, M.N.; Shatnawi, A.M. Intelligent traffic light flow control system using wireless sensors networks. J. Inf. Sci. Eng. 2010, 26, 753–768. [Google Scholar]
- Fernandez, S.; Hadfi, R.; Ito, T.; Marsa-Maestre, I.; Velasco, J.R. Ontology-Based Architecture for Intelligent Transportation Systems Using a Traffic Sensor Network. Sensors 2016, 16, 1287. [Google Scholar] [CrossRef] [PubMed]
- Collotta, M.; Bello, L.L.; Pau, G. A novel approach for dynamic traffic lights management based on Wireless Sensor Networks and multiple fuzzy logic controllers. Expert Syst. Appl. 2015, 42, 5403–5415. [Google Scholar] [CrossRef]
- Kulkarni, R.V.; Venayagamoorthy, G.K. Particle Swarm Optimization in Wireless-Sensor Networks: A Brief Survey. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2011, 41, 262–267. [Google Scholar] [CrossRef]
- Shan, Z.; Zhu, Q. Camera location for real-time traffic state estimation in urban road network using big GPS data. Neurocomputing 2015, 169, 134–143. [Google Scholar] [CrossRef]
- Castillo, E.; Nogal, M.; Rivas, A.; Sánchez-Cambronero, S. Observability of traffic networks. Optimal location of counting and scanning devices. Transp. B Transp. Dyn. 2013, 1, 68–102. [Google Scholar] [CrossRef]
- Hu, S.R.; Peeta, S.; Chu, C.H. Identification of vehicle sensor locations for link-based network traffic applications. Transp. Res. Part B Methodol. 2009, 43, 873–894. [Google Scholar] [CrossRef]
- Taale, H.; Bäck, T.; Preuss, M.; Eiben, A.; De Graaf, J.; Schippers, C. Optimizing traffic light controllers by means of evolutionary algorithms. In Proceedings of the 6th European Congress on Intelligent Techniques and Soft Computing, Aachen, Germany, 7–10 September 1998; Volume 3, pp. 1730–1734. [Google Scholar]
- Garcia-Nieto, J.; Alba, E.; Olivera, A.C. Swarm intelligence for traffic light scheduling: Application to real urban areas. Eng. Appl. Artif. Intell. 2012, 25, 274–283. [Google Scholar] [CrossRef]
- Lau, S.P.; Merrett, G.V.; Weddell, A.S.; White, N.M. A traffic-aware street lighting scheme for Smart Cities using autonomous networked sensors. Comput. Electr. Eng. 2015, 45, 192–207. [Google Scholar] [CrossRef]
- Adler, J.L.; Blue, V.J. A cooperative multi-agent transportation management and route guidance system. Transp. Res. Part C Emerg. Technol. 2002, 10, 433–454. [Google Scholar] [CrossRef]
- Bazzan, A.L.C.; Klugl, F. A review on agent-based technology for traffic and transportation. Knowl. Eng. Rev. 2014, 29, 375–403. [Google Scholar] [CrossRef]
- Chen, B.; Cheng, H.H. A review of the applications of agent technology in traffic and transportation systems. IEEE Trans. Intell.Transp. Syst. 2010, 11, 485–497. [Google Scholar] [CrossRef]
- Tubaishat, M.; Shang, Y.; Shi, H. Adaptive traffic light control with wireless sensor networks. In Proceedings of the 4th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 11–13 January 2007; pp. 187–191. [Google Scholar]
- Roozemond, D.A. Using intelligent agents for pro-active, real-time urban intersection control. Eur. J. Oper. Res. 2001, 131, 293–301. [Google Scholar] [CrossRef]
- Choy, M.C.; Srinivasan, D.; Cheu, R.L. Cooperative, hybrid agent architecture for real-time traffic signal control. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2003, 33, 597–607. [Google Scholar] [CrossRef]
- Ruey-Shun, C.; Duen-Kai, C.; Szu-Yin, L. Actam: Cooperative multi-agent system architecture for urban traffic signal control. IEICE Trans. Inf. Syst. 2005, 88, 119–126. [Google Scholar]
- Logi, F.; Ritchie, S.G. A multi-agent architecture for cooperative inter-jurisdictional traffic congestion management. Transp. Res. Part C Emerg. Technol. 2002, 10, 507–527. [Google Scholar] [CrossRef]
- Chen, B.; Cheng, H.H.; Palen, J. Integrating mobile agent technology with multi-agent systems for distributed traffic detection and management systems. Transp. Res. Part C Emerg. Technol. 2009, 17, 1–10. [Google Scholar] [CrossRef]
- Cruz-Piris, L.; Rivera, D.; Marsa-Maestre, I.; de la Hoz, E. Optimizing vehicle trips using agent negotiation through a traffic matrix. In Proceedings of the The Tenth International Workshop on Agent-based Complex Automated Negotiations (ACAN2017), São Paulo, Brazil, 8–9 May 2017. [Google Scholar]
- Sastre, D.; Torres, J.; Menendez, J.M. Sistemas de AdquisicióN de InformacióN de TráFico: Estado Actual y Futuro; Technical Report; Plataforma Tecnológica de la Carretera (PTC): Madrid, Spain, 2011. (In Spanish) [Google Scholar]
- Kell, J.H.; Fullerton, I.J.; Mills, M.K. Traffic Detector Handbook; FHWA-HRT-06-108; Federal Highway Administration (US Department of Transportation): Washington, DC, USA, 2006; Volume I.
- Wegener, A.; Piórkowski, M.; Raya, M.; Hellbrück, H.; Fischer, S.; Hubaux, J.P. TraCI: An Interface for Coupling Road Traffic and Network Simulators. In Proceedings of the 11th Communications and Networking Simulation Symposium; ACM: New York, NY, USA, 2008; pp. 155–163. [Google Scholar]
- Van Diggelen, F.; Enge, P. The worlds first gps mooc and worldwide laboratory using smartphones. In Proceedings of the 28th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 361–369. [Google Scholar]
- Kazerani, A.; Winter, S. Can betweenness centrality explain traffic flow. In Proceedings of the 12th AGILE International Conference on Geographic Information Science, Hannover, Germany, 2–5 June 2009; pp. 1–9. [Google Scholar]
- Wang, P.; Hunter, T.; Bayen, A.M.; Schechtner, K.; González, M.C. Understanding road usage patterns in urban areas. Sci. Rep. 2012, 2, 1001. [Google Scholar] [CrossRef] [PubMed]
- Brandes, U. On variants of shortest-path betweenness centrality and their generic computation. Soc. Netw. 2008, 30, 136–145. [Google Scholar] [CrossRef]
- NetworkX. Edge_Betweenness_Centrality. Available online: https://networkx.github.io/documentation/\networkx-1.10/reference/generated/networkx.algorithms.centrality.edge_betweenness_centrality.html#\networkx.algorithms.centrality.edge_betweenness_centrality (accessed on 13 December 2017).
- Winter, S. Modeling costs of turns in route planning. GeoInformatica 2002, 6, 345–361. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of SUMO—Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- TAPASCologne Scenario. Available online: http://sumo.dlr.de/wiki/Data/Scenarios/TAPASCologne (accessed on 14 July 2017).
- Uppoor, S.; Trullols-Cruces, O.; Fiore, M.; Barcelo-Ordinas, J.M. Generation and analysis of a large-scale urban vehicular mobility dataset. IEEE Trans. Mob. Comput. 2014, 13, 1061–1075. [Google Scholar] [CrossRef]
- El-Tantawy, S.; Abdulhai, B.; Abdelgawad, H. Multiagent Reinforcement Learning for Integrated Network of Adaptive Traffic Signal Controllers (MARLIN-ATSC): Methodology and Large-Scale Application on Downtown Toronto. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1140–1150. [Google Scholar] [CrossRef]
- Simulation of Urban MObility Wiki: Simulation/Why Vehicles Are Teleporting. Available online: http://sumo.dlr.de/wiki/Simulation/Why_Vehicles_are_teleporting (accessed on 7 December 2017).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors equipped in vehicles | Global navigation Satellite System (GNSS) | GPS and Galileo are the most well-known systems of this type. They provide information about the position and current velocity of the vehicles. |
| Autonomous sensors | In-roadway sensors | Senses the presence of a conductive metal object by inducing currents in the object, which reduce the loop inductance. |
| Magnetic sensors: Similar to the inductive-loop detectors, are able to sense the presence of vehicles using the perturbation they cause in the magnetic field. | ||
| Over-roadway sensors | Microwave or laser radar sensors: Detect vehicles by transmitting microwave or laser signals and receiving the echoes from them. | |
| Infrared sensors: Detect vehicles by receiving the energy emitted by roadways and vehicles or energy reflected from them. | ||
| Cameras: It is possible to detect vehicles by the processing of the images taken by one or more video cameras. |
| Trip duration | Lower | Equal | Higher |
|---|---|---|---|
| Actuated Traffic Lights | 58.70 | 28.41 | 12.89 |
| Proposed Multi-Agent System | 60.52 | 27.08 | 12.41 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cruz-Piris, L.; Rivera, D.; Fernandez, S.; Marsa-Maestre, I. Optimized Sensor Network and Multi-Agent Decision Support for Smart Traffic Light Management. Sensors 2018, 18, 435. https://doi.org/10.3390/s18020435
Cruz-Piris L, Rivera D, Fernandez S, Marsa-Maestre I. Optimized Sensor Network and Multi-Agent Decision Support for Smart Traffic Light Management. Sensors. 2018; 18(2):435. https://doi.org/10.3390/s18020435
Chicago/Turabian StyleCruz-Piris, Luis, Diego Rivera, Susel Fernandez, and Ivan Marsa-Maestre. 2018. "Optimized Sensor Network and Multi-Agent Decision Support for Smart Traffic Light Management" Sensors 18, no. 2: 435. https://doi.org/10.3390/s18020435
APA StyleCruz-Piris, L., Rivera, D., Fernandez, S., & Marsa-Maestre, I. (2018). Optimized Sensor Network and Multi-Agent Decision Support for Smart Traffic Light Management. Sensors, 18(2), 435. https://doi.org/10.3390/s18020435