1. Introduction
Spectrum occupancy information is currently used to make an efficient usage of the spectrum [
1]. This information allows central manager to perform spectrum cartography by constructing Interference Maps (IM) with geo-referenced information in different frequency bands.
A central administrator constructs these maps by the information sent by spectral sensors. This construction is based on both the spectral power measured by each sensor and its location. The construction of these maps generally follows 5 stages: Filtering and sampling, interpolation, reduction data, data storage and visualization [
2]. In the filtering and sampling stage, energy measurements in different bands are continuously taken at all possible locations by the spectral sensors. In the second stage, different interpolation techniques are used to estimate spectral power values at points that have not been measured. Then, reduction data strategies are used to manage more efficiently the huge amount of recorded data by the spectral sensors. The store stage allows researchers and businesses to analyze aspects as environment modeling for cognitive radio systems, inference models or wide-band spectrum modeling and prediction. This analysis requires big data management and other methods for storing, transmitting and processing the spectral information. The final stage allows operators to visualize the information properly. This stage is used to perform spectrum availability analysis and optimize the network, among other processes.
The construction of IM for spectrum cartography have been extensively studied in the field of spectrum management. In [
2] the authors made a survey on the techniques used for the development of interference maps.
One of the first representative works in the construction of IM is [
3]. In this work, Ayala et al. constructed IM by locating some spectral sensors in certain geographical points. The sensors send spectral information to a server, and the power levels of all the points in the area are predicted using interpolation algorithms. In [
4], the authors presented a spline-based approach to field estimation, where the estimated field enables cartographing the space-frequency distribution of power generated by active RF sources.
In [
5,
6,
7,
8], the authors introduced compressive sensing (CS) techniques for the building of IM. In their works, a central manager constructs the maps by CS techniques rather than interpolation techniques, taking advantage of the sparsity in the model of location of the sensors. In [
9], the authors applied CS techniques in spectral signals, taking in count the sparsity of the users occupation in frequency or time domain. However, this work does not focus on the construction of IM.
Currently the construction of IM demands to storage, transmit and process an amount of data that is in the order of thousands of Terabytes [
2]. This amount of data requires the development of reduction data strategies that facilitates all the computational processes involved in the construction of these maps. In this sense, several works have used CS techniques as reduction data strategy [
5,
6,
7,
8], in the context of cartography. These works have focused only on the spatial sparsity.
In this paper, we consider the possibility to apply a previous subsampling process in the frequency domain. The aim is to reduce the amount of data send by the sensors, which are subsequently processed into the management center. In this way, we can take advantage both spatial and frequency sparsity. Besides, this strategy allows us to analyze simultaneously several IM, since the research works have addressed this problem by processing the IM separately.
We propose a Compressive Sensing Multiespectral Cartography (CSMC) model to construct IM. The proposed model conceives several IM as a data cube of multispectral images [
10], which allowed us to apply compressive sensing image (CSI) techniques [
11]. In addition, we propose a CSMC architecture for the Spectral Management in a wireless network. This architecture defines the components of the proposed model and the tasks of these components.
Since the data processing in CSI are consistent with the physic model used for acquisition of multispectral images [
12], it was required to adapt some stages of the traditional CSI technique and include some new ones. In this sense, our CSMC model takes in consideration aspects as: the spectrum sensing process, the spectrum management devices, operation of radio spectral sensors and smart wireless devices.
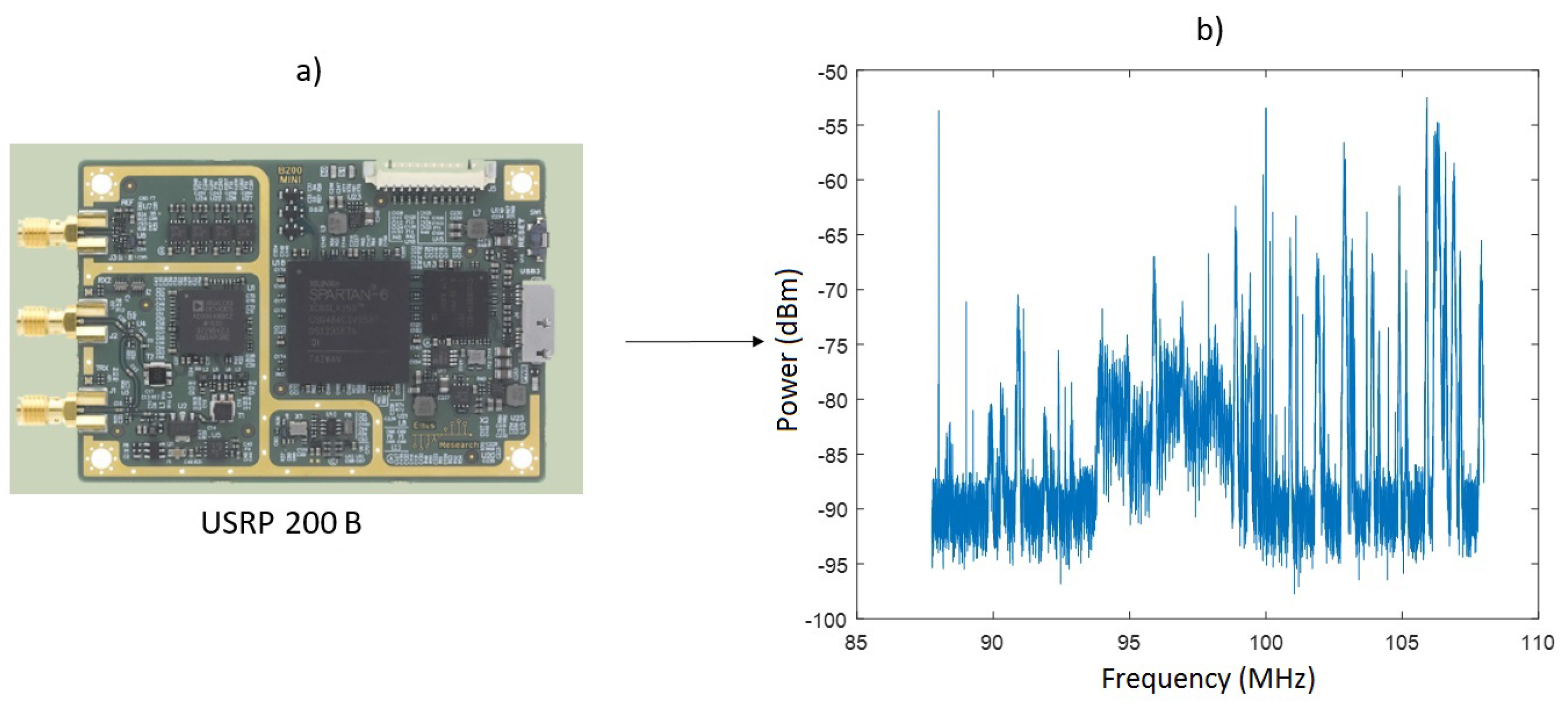
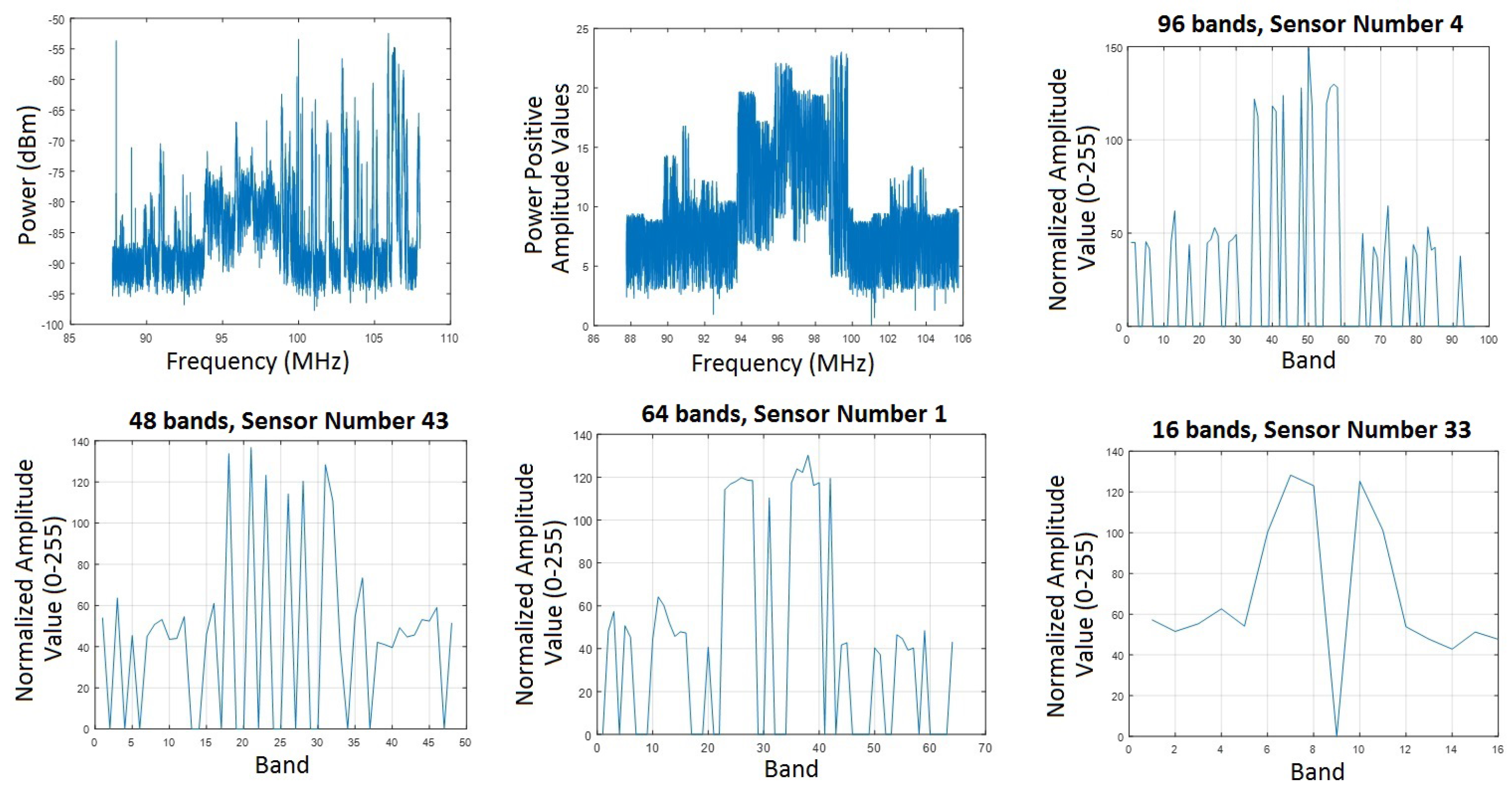
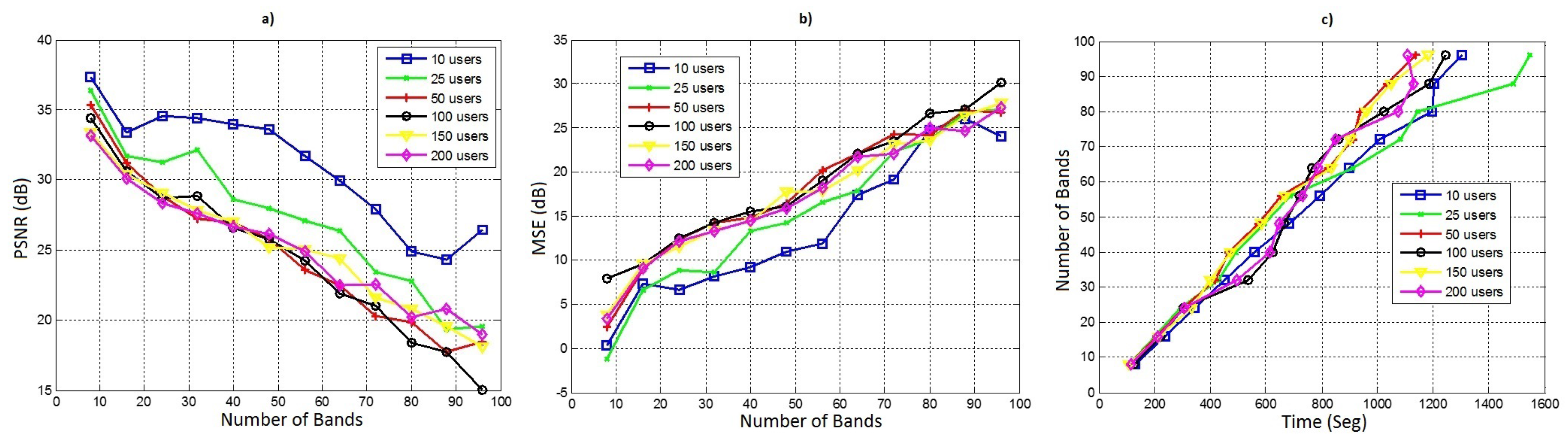
We tested our CSMC model with spectral signals acquired by USRP 200 B Software Defined Radios (SDR). Based on these acquired signals, we construct multispectral data cubes up to 96 multispectral maps, which have a size around 6 million samples. We analyze the performance of our model by measuring the PSNR between the original map and the CSMC map. We show how the PSNR is affected when both the number of sensors and IM are increased. The results show that CSMC allows the use of only a 50% of the samples generated by the sensors, as well as, the spectrum cartography information can be stored using only a 6.25% of the original data. The reconstruction process achieved a PSNR above 24 dB for cubes of 96 IM. A higher PSNR can be achieved by using a lower number of maps per data cube.
Recent advances on Urban Sensing [
13] and Participatory Sensor Network [
14] suggest that in future generation scenarios is feasible to use smart devices as spectrum sensors. In this sense, the proposed model could facilitate the spectrum management in a CSMC network, in the context of smart cities.
The paper is structured in the following sections:
Section 1.1 presents the CS theory and how it can be used in multispectral image.
Section 1.2 shows the comparison between CSI and CSMC model.
Section 2.1 describes the functional architecture of the whole sensing system. In
Section 2.2 the CSMC math model is formally presented. The key aspects of proposed model are described in
Section 2.3,
Section 2.4 and
Section 2.5.
Section 3 shows the results regarding the implementation of the proposed model.
Section 4 shows a discussion of the obtained results. Finally, the conclusions are presented in
Section 5.
1.1. Compressive Sensing and Compressive Spectral Imaging
Compressive Sensing (CS) is a signal processing technique that can be used for reducing the number of samples in the spectrum sensing operation. CS allows the capturing and reconstruction of a signal using far less samples than those required by traditional approaches [
15].
A signal
is
K-sparse if
, where
has at most
K non-zeros values. It is possible that the signal has less non-zeros values in another representation basis
where
. CS takes advantage of the sparsity principle of the signals in order to apply sensing protocols that capture the essential information of the signal with a small number of samples. The sensing process can be represented by
where
is a sampling matrix. Note that Equation (
1) is an undetermined linear system if
, but if
is sparse, it is possible to find a unique solution solving
CS generally involves solving
or the equivalent convex unconstrained optimization problem:
where
is the Euclidean norm and
is the
norm.
Compressive Spectral Imaging (CSI) is an interesting CS application where the data of a multispectral image involves a large amount of spatial and spectral information that can be represented with fewer compressive samples. In some cases, the amount of data in CSI can be reduced up to 90%. In this field, three of the most remarkable CSI architectures are the spatio-spectral encoded compressive HS imager (SSCSI) [
16], the coded aperture snapshot spectral imagers (CASSI) [
12] and snapshot colored compressive spectral imager (SCCSI) [
11].
In CSI, the multispectral image is modeled as a data cube
where
are the spatial dimensions and
L is the number of spectral bands. CSI measurements can be modeled as Equation (
1) and the signal can be reconstructed by solving the optimization problem Equation (
4). In this case, the sampling matrix
corresponds to an optical system. For instance, CASSI system [
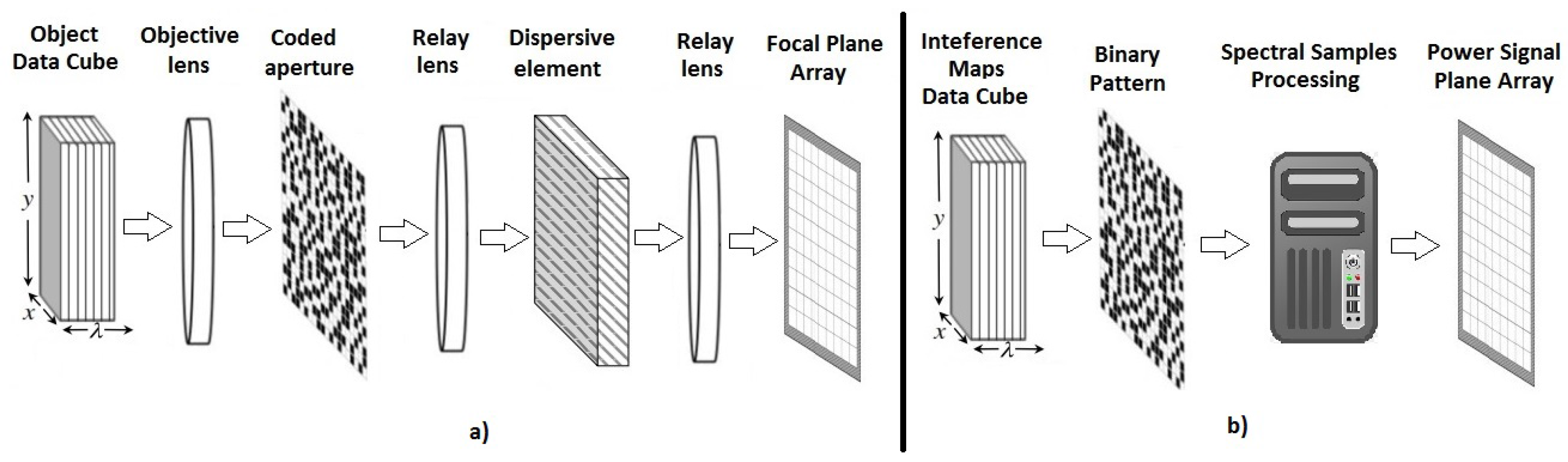
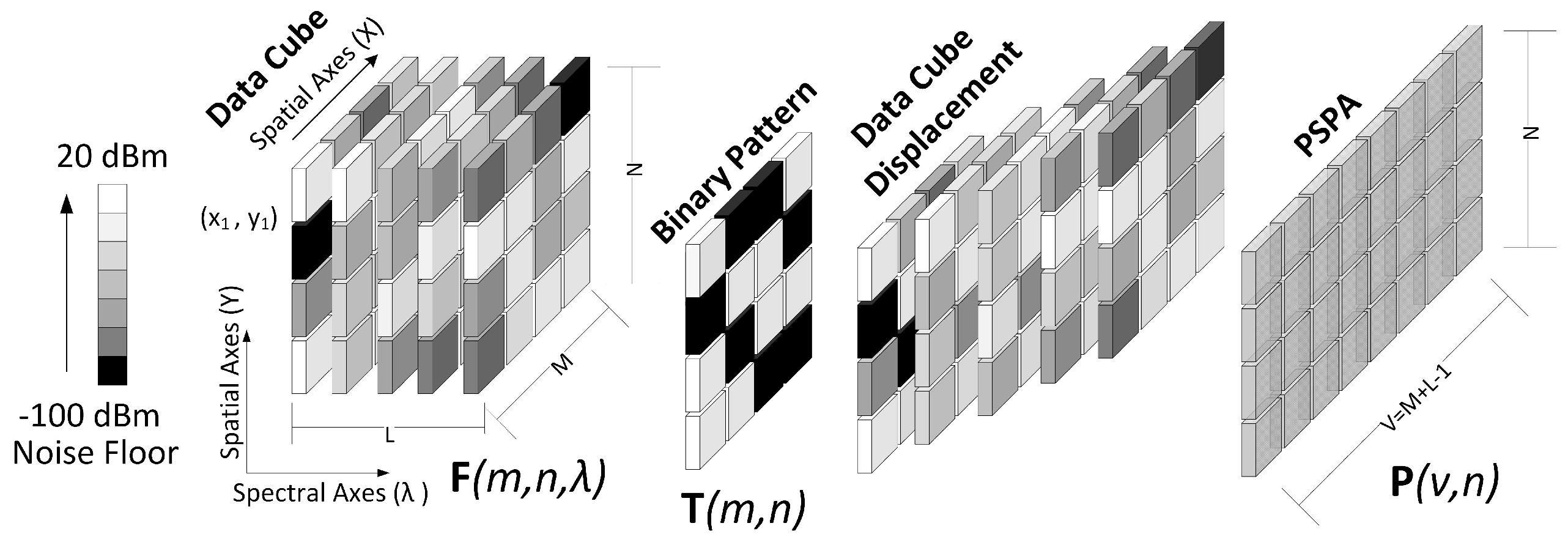
12] is an architecture that attains CSI measurements, in three main steps: first encoding the information with a code aperture pattern, second using a prism as a dispersive element that shifts the spectral information and finally impinging in a focal plane array (FPA) detector. The process is shown in the
Figure 1a.
1.2. Analogy Between Compressive Spectral Imaging and Compressive Sensing Multispectral Cartography Architectures
Let us consider a scenario where there are J sensors located in a geographical area of square meters. The sensors are broadcasting power information of L spectral bands and the location of the sensors is known. It is possible to model this power-spectral information as a group of IM in different frequencies by building a 3D data cube. In this 3D data cube, the X and Y axis correspond to different IM and the Z axis corresponds to the different spectral bands. Our proposal is called Compressive Sensing Multispectral Cartography (CSMC) and combines both the CS and CSI techniques to significantly reduce the data involved in the process.
The CSI and CSMC architectures have several key points in common:
In CSI, the image is modelled as a 3D data cube where each pixel has a position and a spectral signature that is represented by the vector . In CSMC, each sensor is located in a geographical point and can sense the spectrum in L frequency bands, whose central frequencies are represented by the vector .
In CSI, each pixel has a colour intensity that depends on its wavelength. In CSMC, each pixel corresponds to a power level, in dB, that depends on the spectral band measured. Therefore, chromatic intensity in CSI corresponds to spectral power level in CSMC.
CSI is applied to the visible electromagnetic spectrum, while CSMC is applied to the electromagnetic radio-microwaves spectrum.
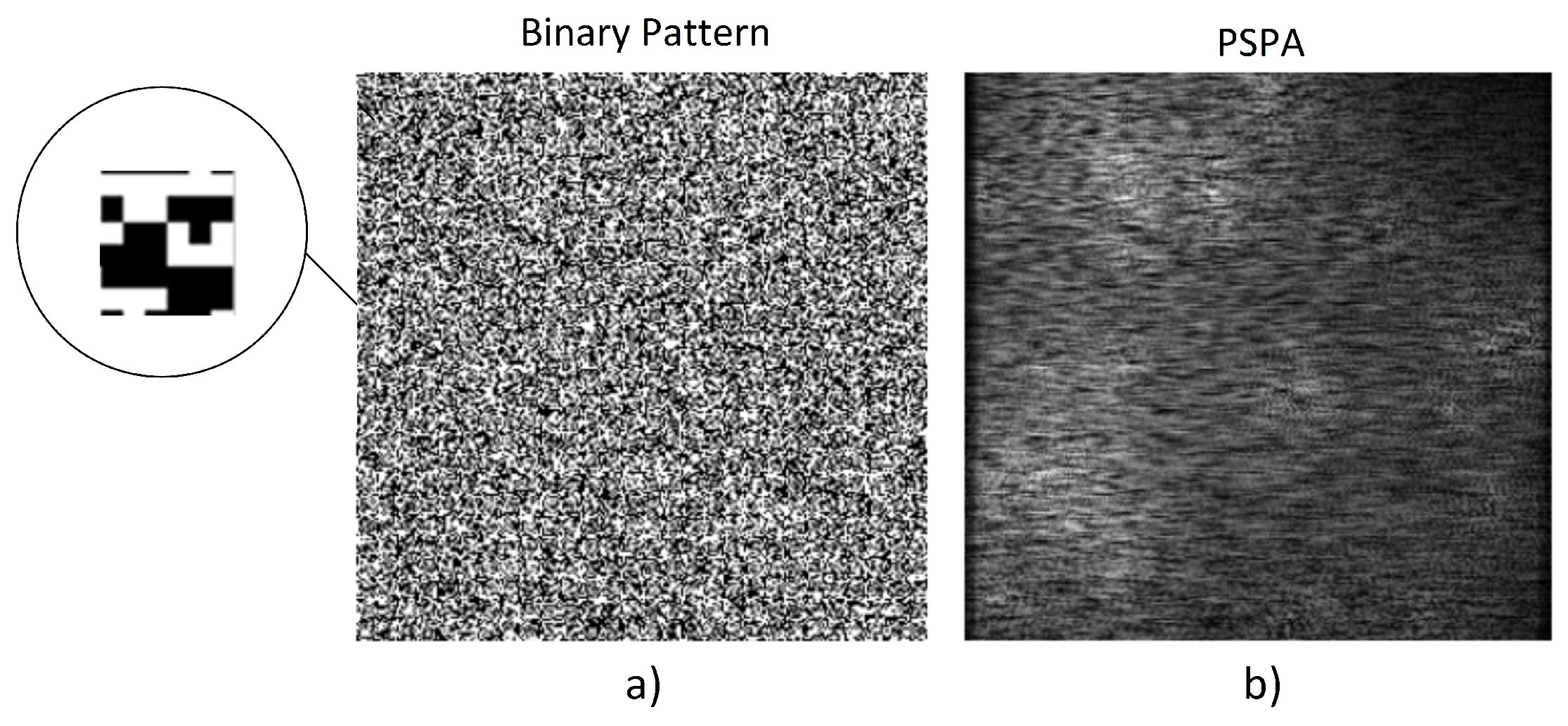
CSI uses aperture codes to select what to sample in the CS process. These codes allow the selective passage of the light into the multispectral digital cameras. In the same style, CSMC uses binary patterns to select what spectral power values will be acquired by the sensors, and to select the spectral band.
In CSI, the spectral imaging information of a 3D cube is projected onto a single 2D plane called Focal Plane Array (FPA). The projection is developed as linear combinations of the coded and spectral dispersed versions of the underlying signal. In CSMC, the spectral manager builds a Power Signal Plane Array (PSPA) as linear combinations of the coded and spectral versions of the power spectral signal.
In CSI, the original multispectral image is reconstructed only using the FPA samples, solving the optimization problem described. In CSMC, the spectral manager takes the 3D data cube that was built and solves the optimization problem previously described. In both cases, the 3D original data cubes are unknown.
The CSMC measures, as in the CSI case, are processed in three stages: First, the spectral information is sampled using binary patterns, then, the samples are computationally processed. Finally, the information is stored in the PSPA (
Figure 1b).
2. Materials and Methods
Eskola et al. [
2] show the stages of creating Cartographic Interference Maps: Filtering and sampling, Interpolation, Reduction of data, Data Storage and Visualization. Following this approach, our CSMC model implements these stages as follows:
In order to implement CSMC, we first propose a functional architecture based on the three main devices involved: the sensors, the server and the spectrum broker. Then, we describe the algorithms and the mathematical model associated with each stage.
2.1. System Description and Associated Functions
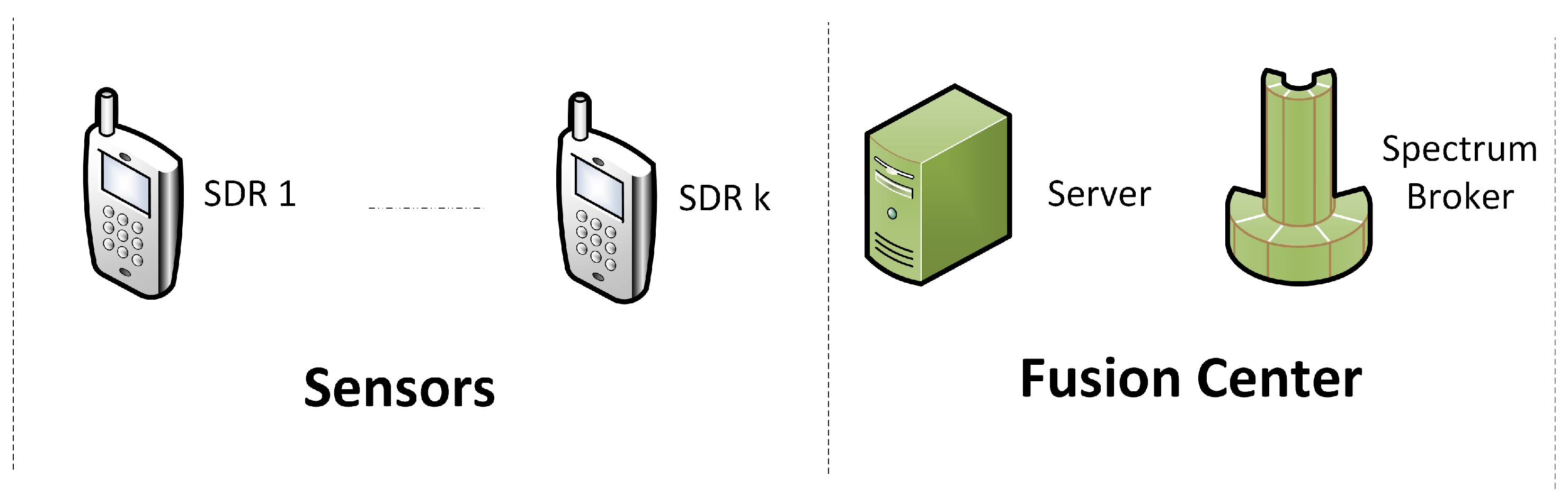
The CSMC system is made up of two components: The Fusion Center and the Sensors (
Figure 2).
The global target is to make cooperative spectrum sensing, where several sensors send spectral power information to the Fusion Center, which processes the information with its two main components: a Server and a Spectral Manager. The Spectral Manager, commonly called Spectrum Broker (SB), is known in wireless networks as the device that controls and distributes spectral resources [
17,
18]. In our context, the sensors correspond to SDR, which can modify their own spectrum configuration, modulation scheme or transmission level power, and specially, they can measure the power spectrum values of a given frequency range.
The three components of the system are inter-related and have specific functions. These components have inputs and outputs clearly defined.
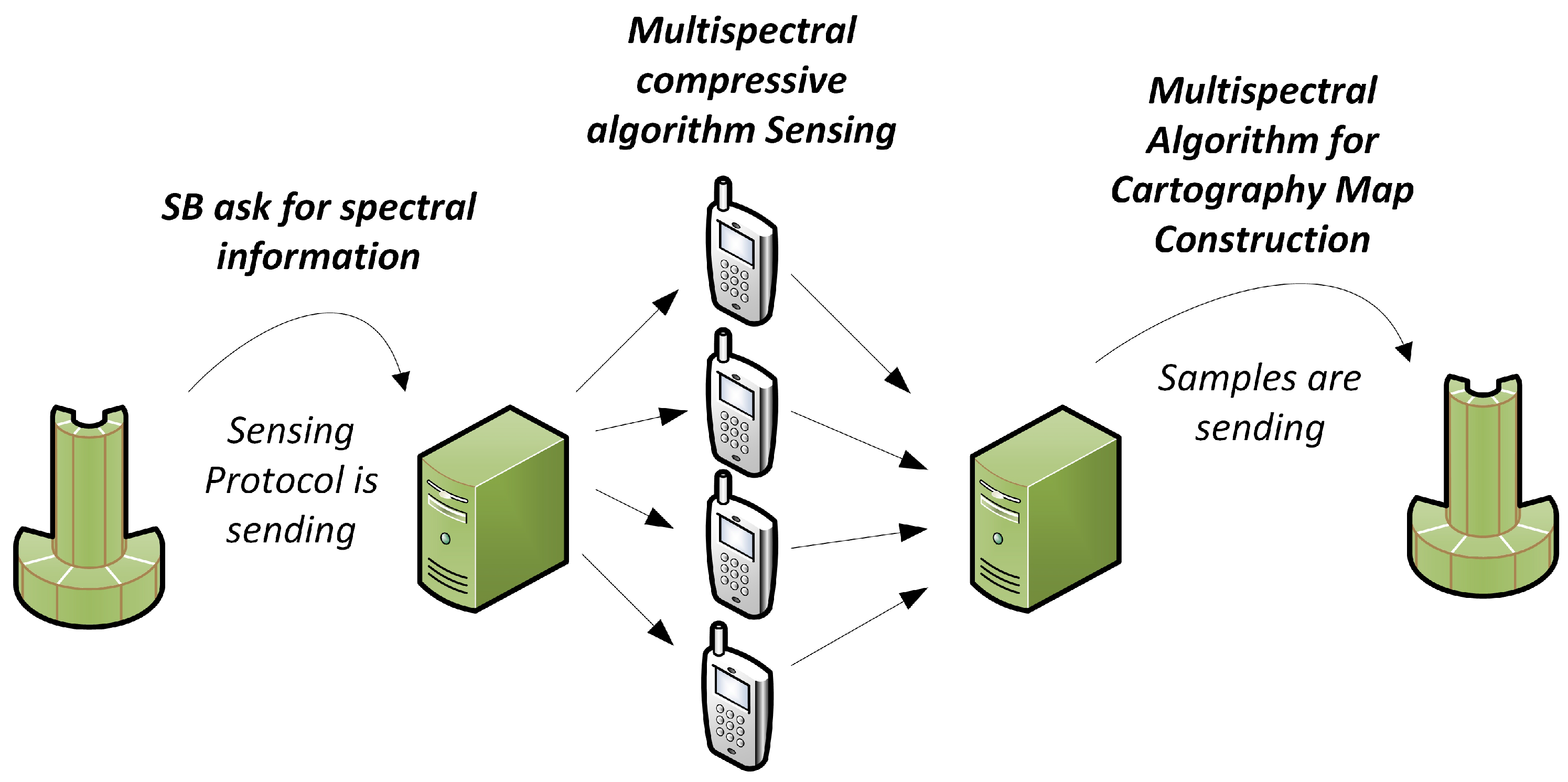
Figure 3 shows the general process associated with the construction of a new interference map, where all the sensors of the network send information to the Fusion Center.
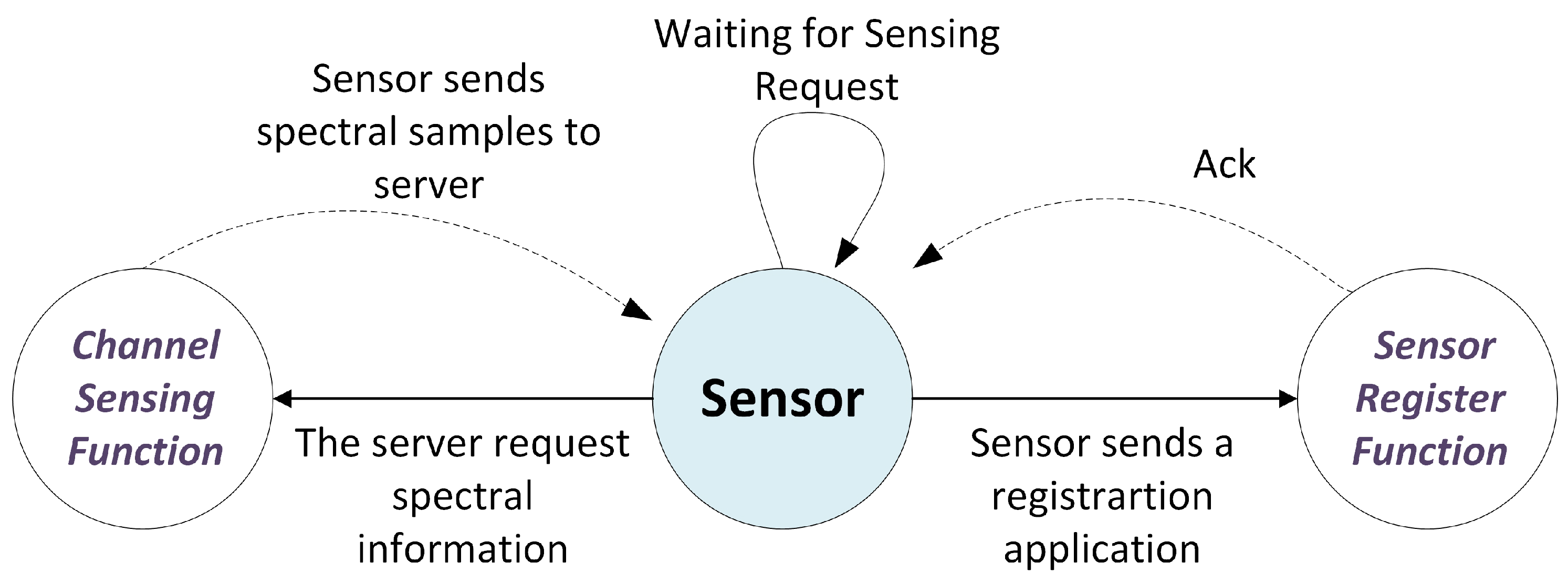
The functions of the sensors are shown in
Figure 4 and correspond to channel sensing and sensor registering functions. The Sensor Registering Function is activated when a new sensor log into the system, so therefore the server has an updated list of all the sensors and their geographical location. The Channel Sensing Function is activated when the Fusion Center asks the sensors to send their spectral power values. It is important to emphasize that in this CSMC proposal, the sensors only acquire and send the values requested by the Fusion Center. Therefore, the server must send the specific code that defines which samples must be acquired together with the sensing request.
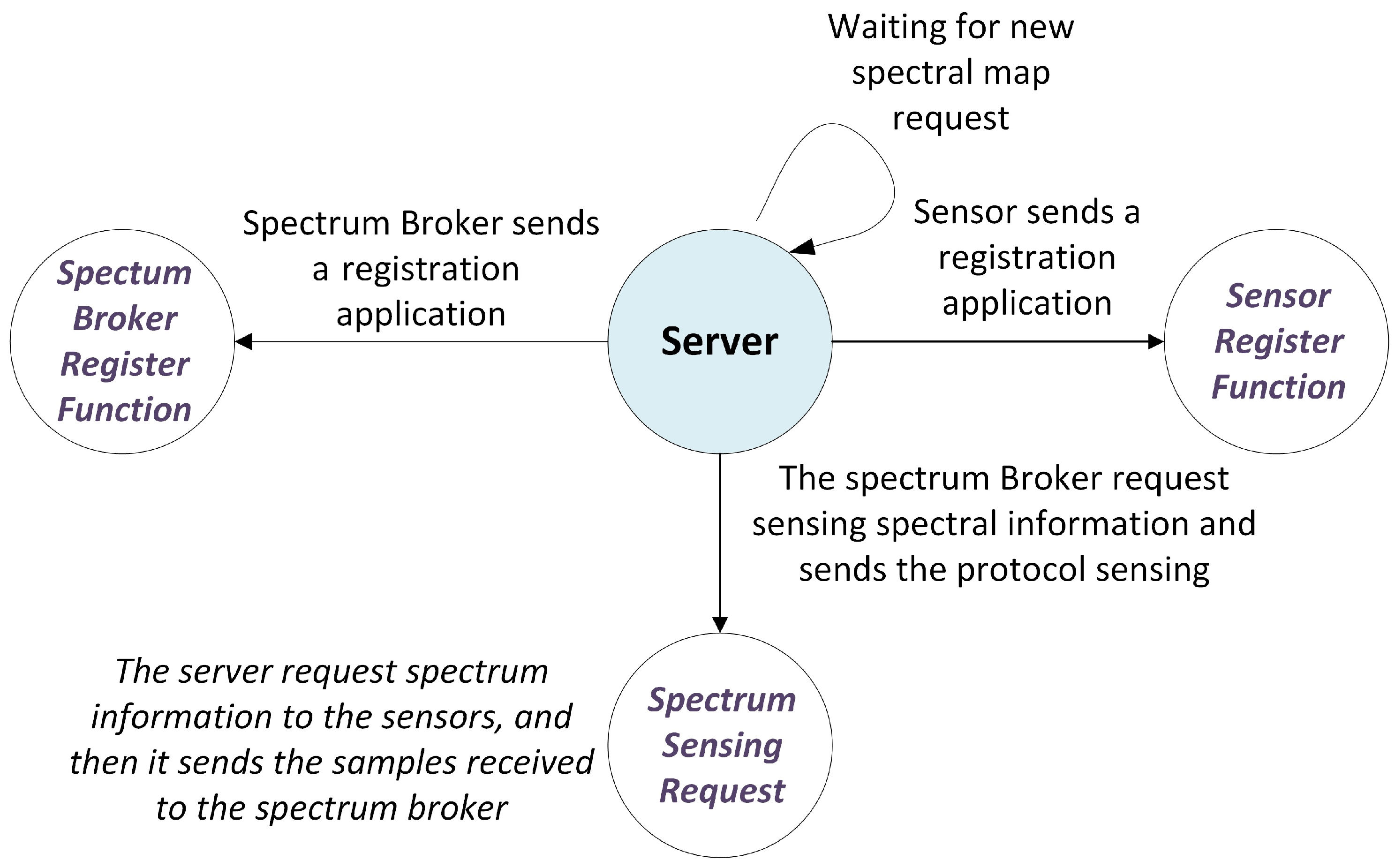
The functions related to the Server are shown in
Figure 5. The Server has two main functions: serving as a bridge between the SDRs and the SB, and registering. There are two main registering functions: the SB register and the register of the sensors. The Server stores the list of sensors and Spectrum Brokers registered in the system. The advantage of being able to work with different Spectrum Brokers is that it allows the system to scale and work with different domains of sensors. For this reason, if there is more than one SB, the sub-system is called Spectrum Broker Domain (SBD).
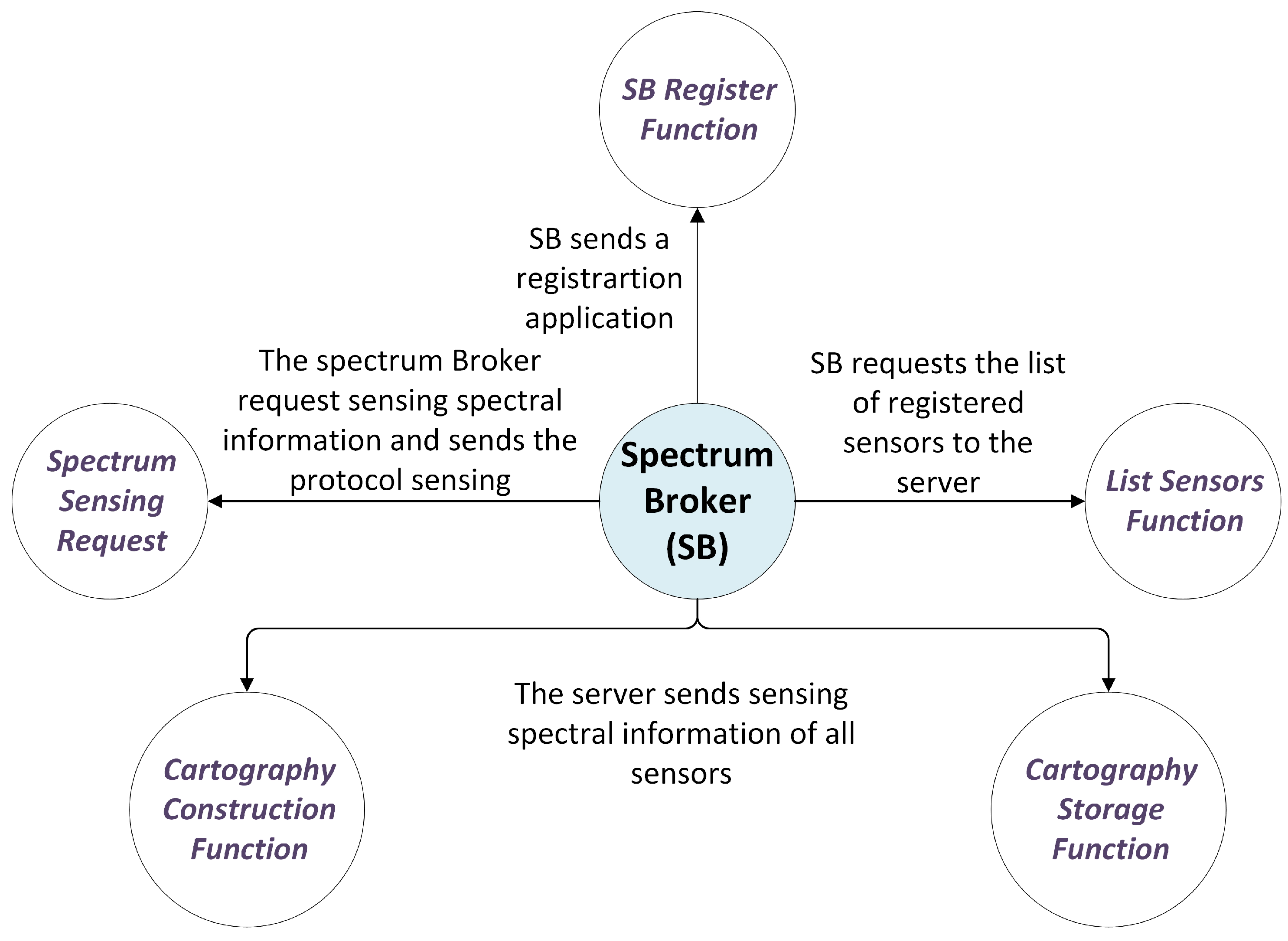
Finally, the five functions of the SB are shown in
Figure 6. The SB register function allows the SB to be registered in the system. The List Sensors function let the Server to request the list of sensors assigned to its domain. In this way, the Server can design the sensing algorithms or the binary patterns, and generates reports. The Spectrum Sensing Request function allows the activation of the sensors, which sense the Spectrum and acquire the power samples. The Cartographic Construction function constructs the cartographic map. The last function, Cartography Storage, allows the system to store the IM.
2.2. Compressive Spectrum Sensing Multispectral Model
Let
J be the number of sensors associated with an interference map. Let
the received signal at the
j sensor, where
. The signal
has the form,
where
is the channel impulse response,
is the transmitted signal,
is the white Gaussian noise and ∗ denotes convolution. By performing a Fourier transformation on the received signal, we can obtain
where
,
,
and
corresponds to the Fourier transformation of
,
,
and
respectively.
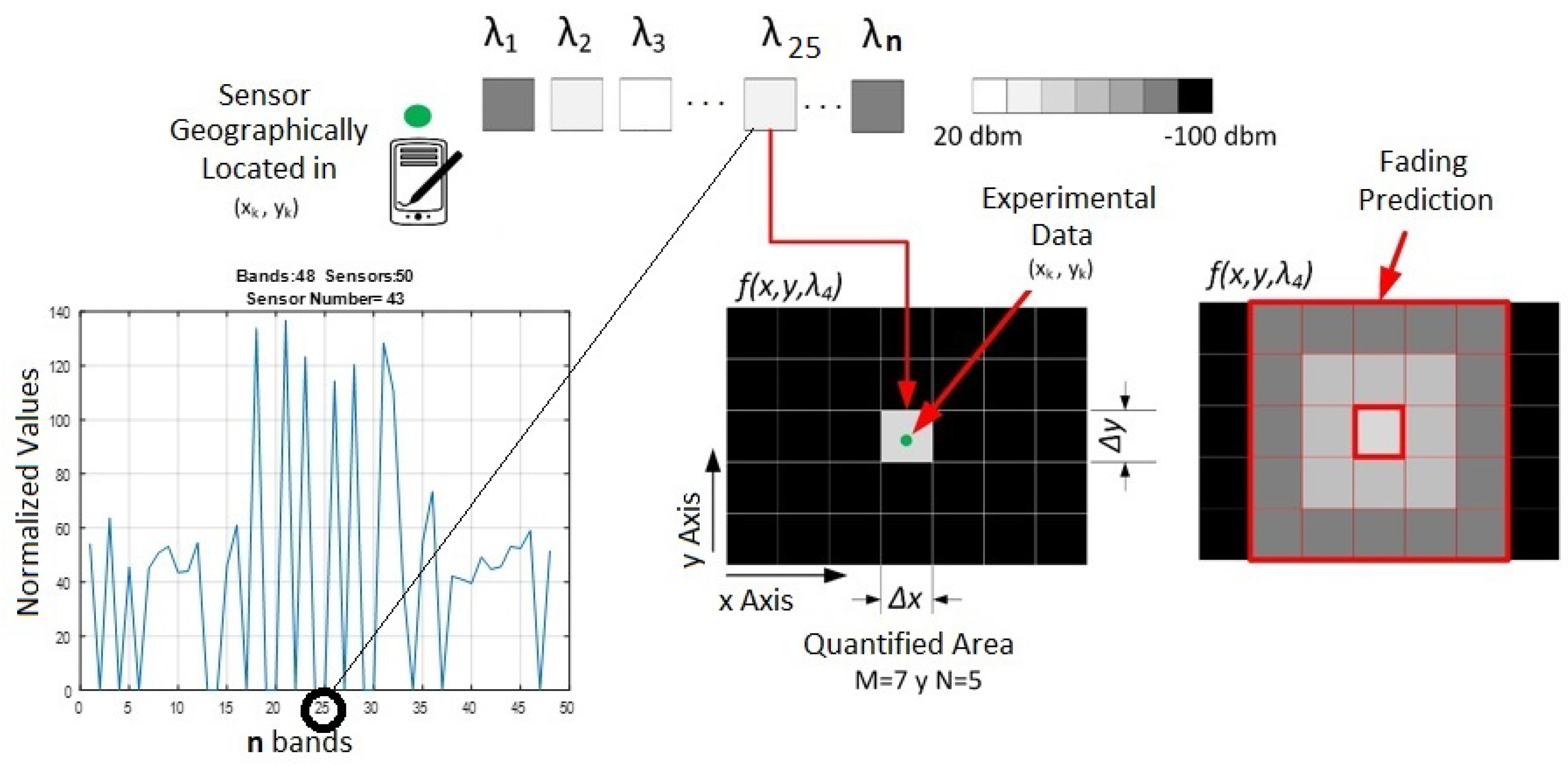
Once the signal is acquired by the SB, it performs a discretization process. Let be a vector with L frequency-domain samples, where , and . The SB can built L IM, that is, one interference map for each subchannel . In this work, each interference map corresponds to a frequency . Since there are J wireless smart devices connected, the SB builds an interference map based on the information of all the devices.
Let be an area of meters, and let A be the discretized version of with a grid of points. We propose to represent several IM as a data cube where corresponds to the spatial location of the power transmitted by wireless devices, and L are the possible spectrum slot bands. Let be a interference map at frequency . Let be a 3D data cube with L interference maps, and let be the respective central frequency of each map.
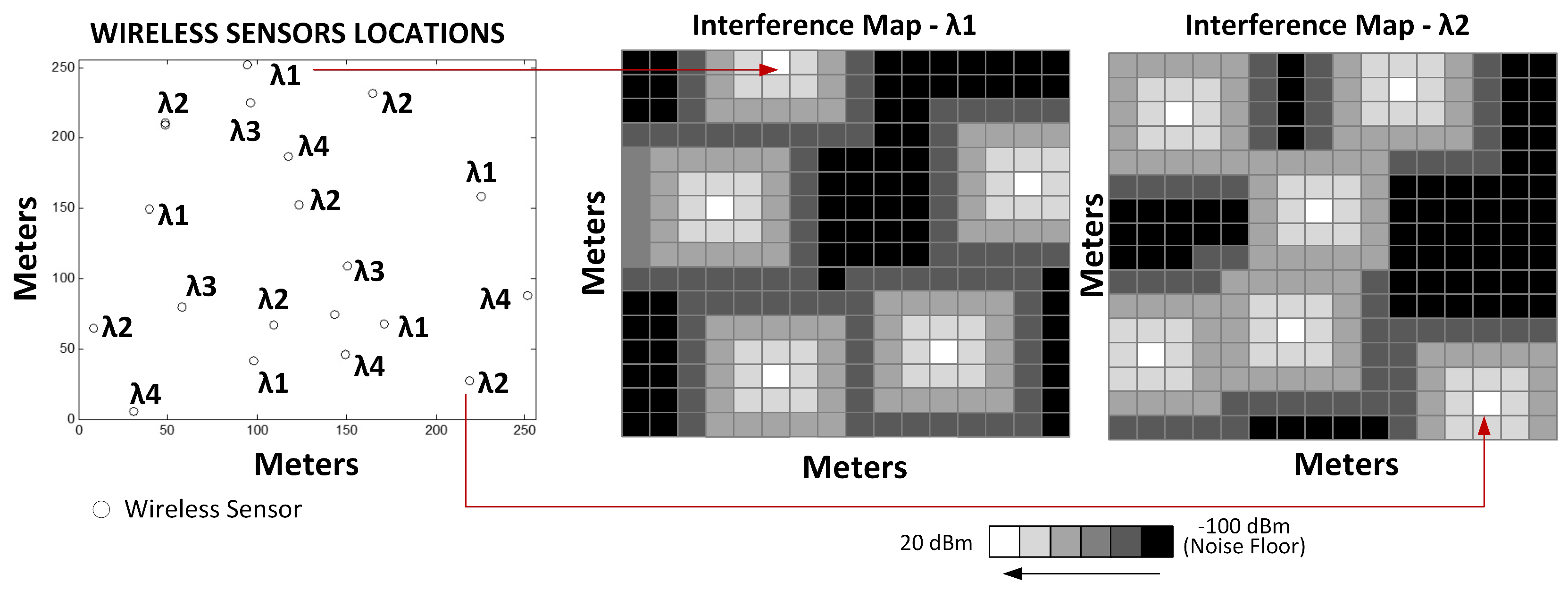
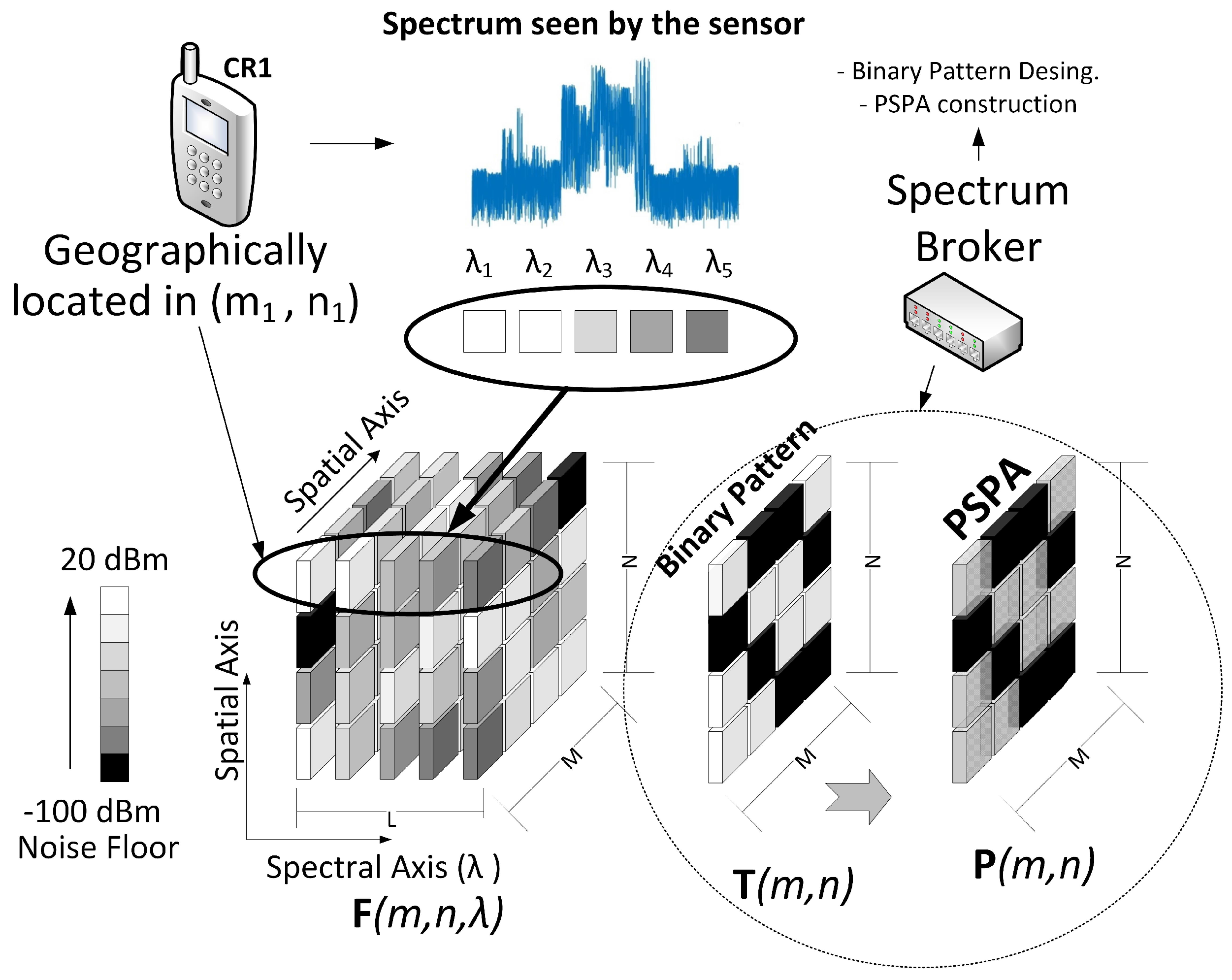
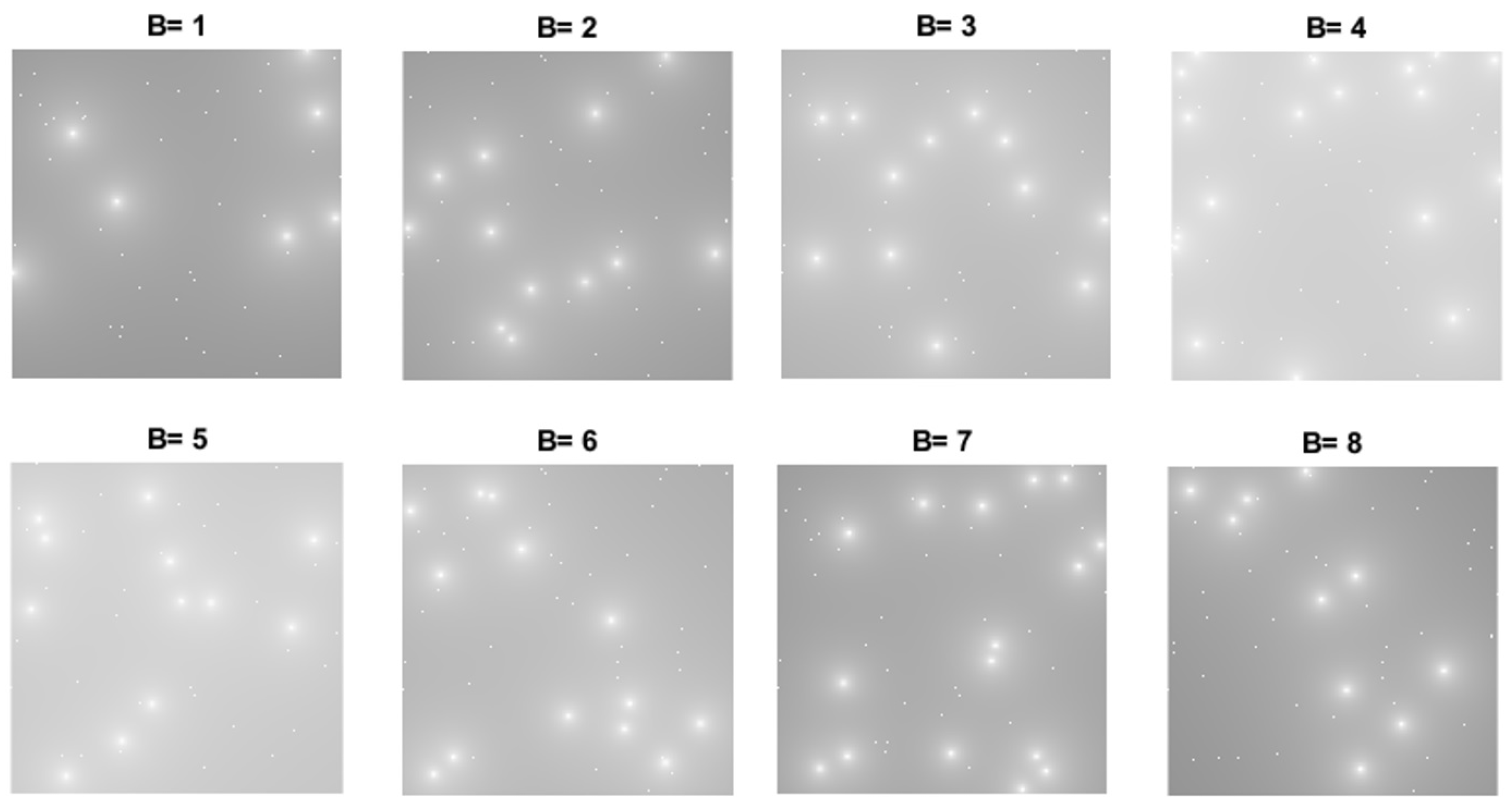
For example,
Figure 7 shows the representation of two IM in an scenario with several wireless devices transmitting at 20 dBm. In this scenario the wireless devices are located in a geographical area
A and are transmitting in four possible bands:
,
,
and
, i.e,
. The grayscale pixels of each interference map represents power levels, where white is the highest power level and black the lowest one.
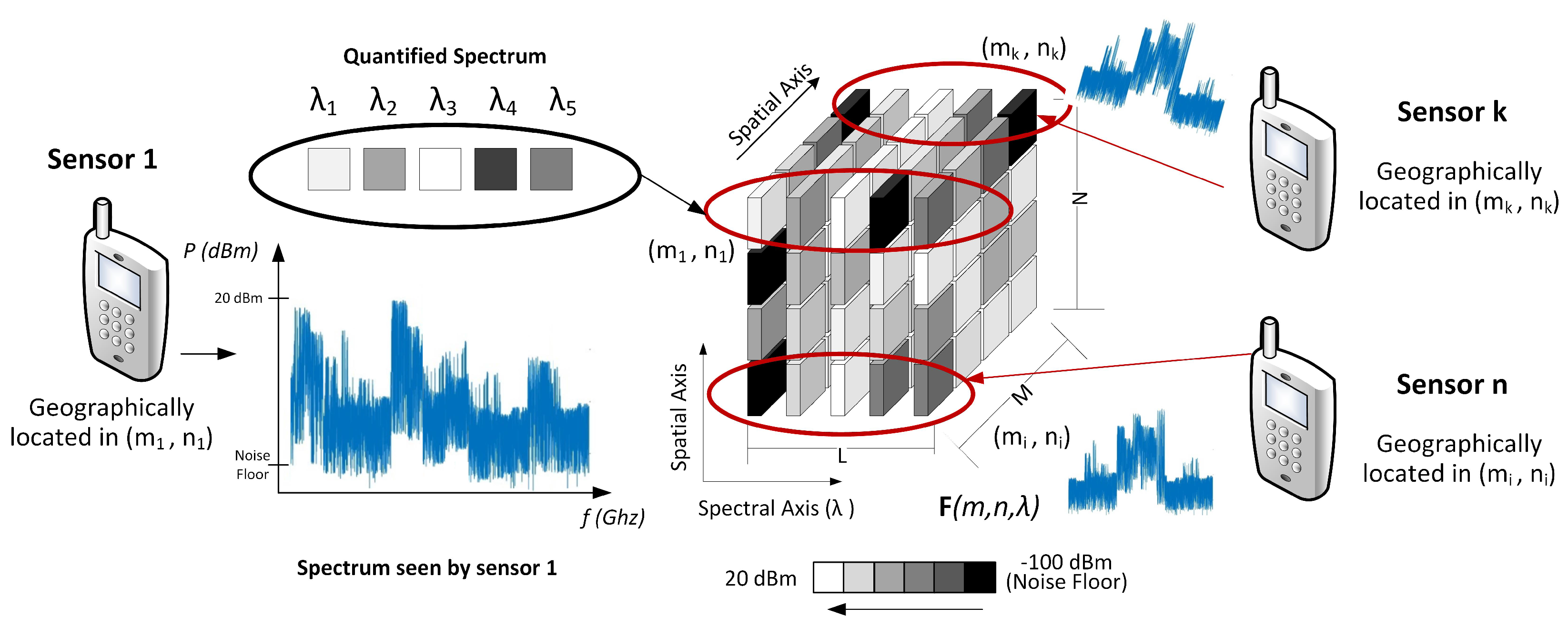
In order to construct the 3D data cube
of the proposed model, suppose that there are
J sensors located in
A. We are considering that the smart wireless devices can also operate as sensors.
Figure 8 shows how the data cube is built using the samples sent from each sensor.
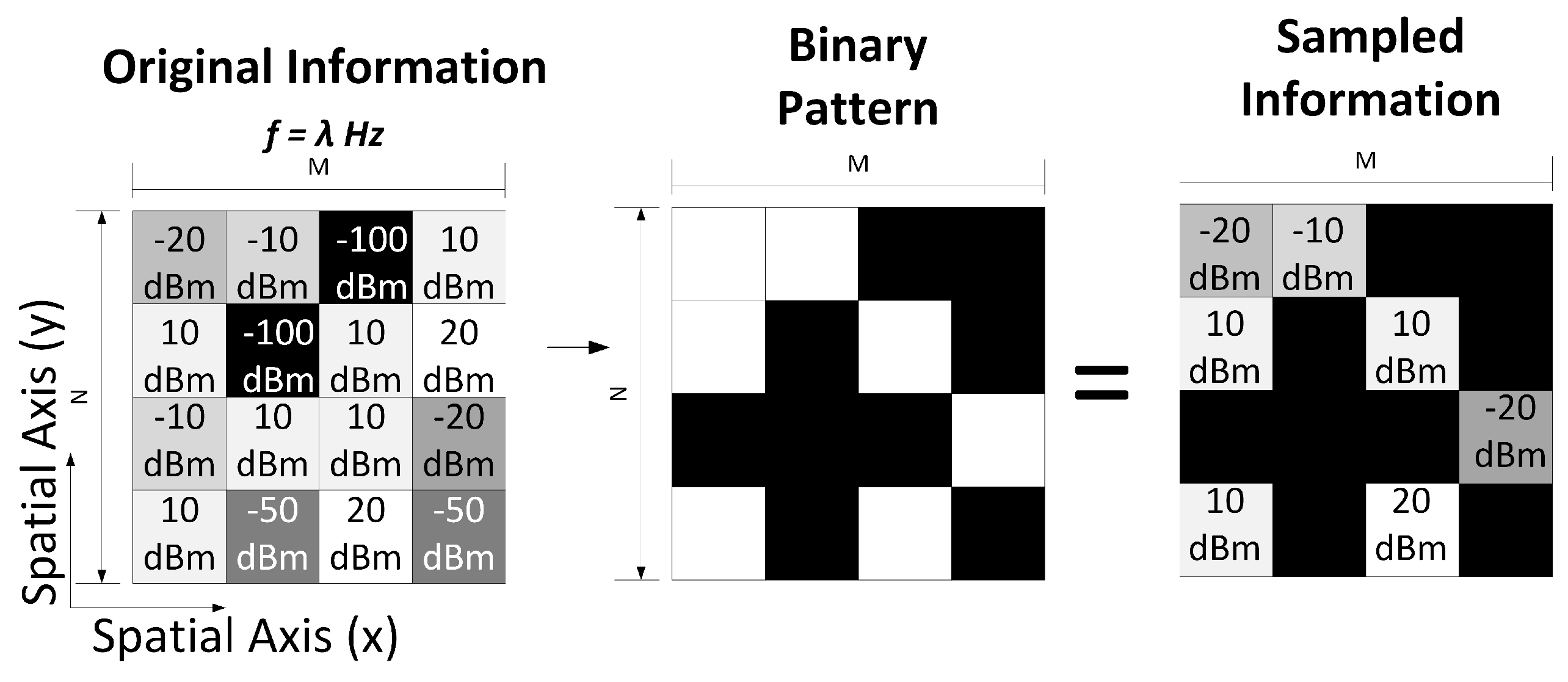
2.3. Binary Patterns and Transmittance
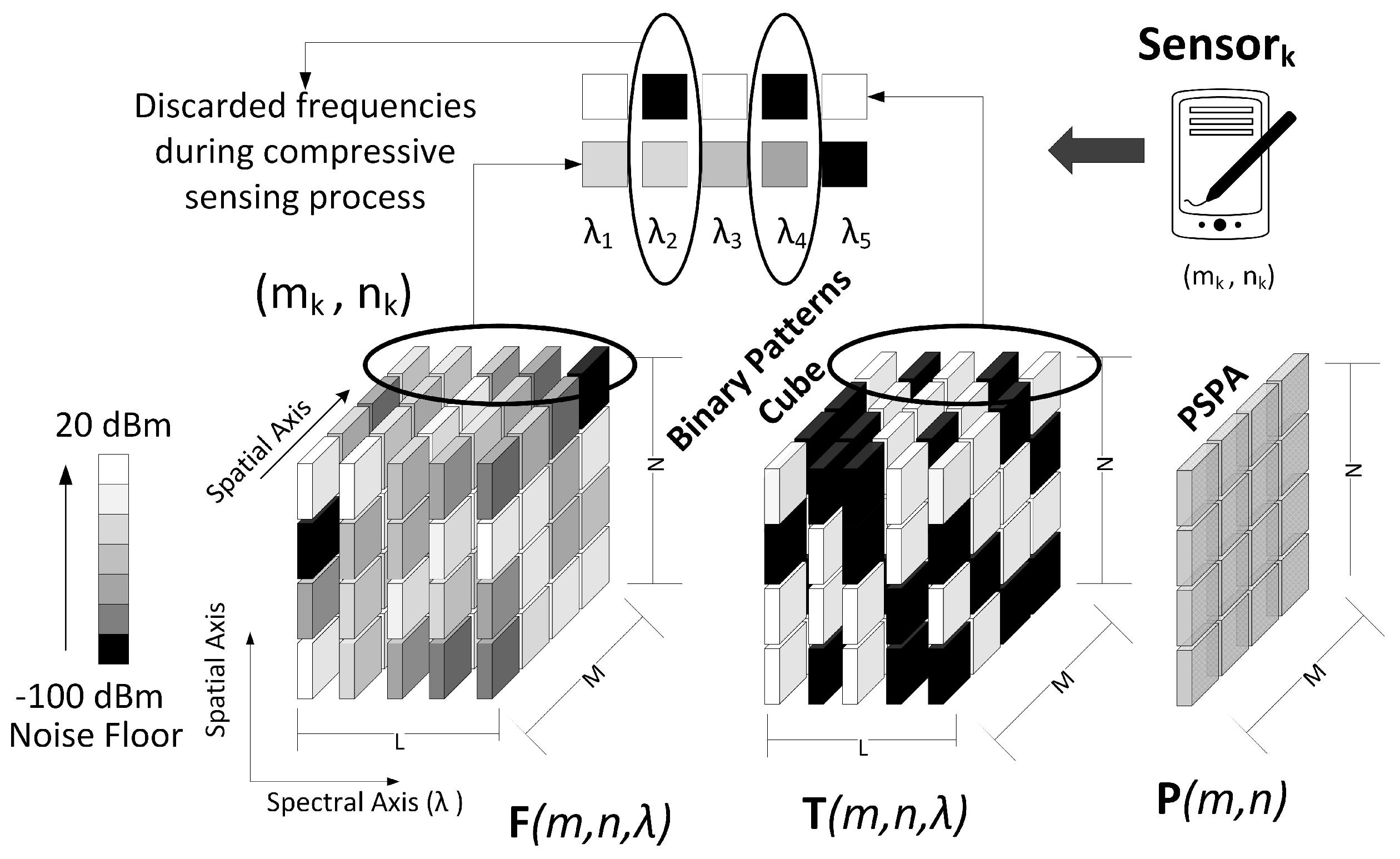
The data cube shown in
Figure 8 is constructed using all samples of the spectral signals sent by the sensors, and knowing the values of all geographic points of the maps. However, in CSMC model only compressive samples in the frequency and spatial domains are used to construct the IM. In this sense, we propose the use of binary patterns that define which samples to take in each domain.
Let
be a binary pattern matrix associated with the frequency band
, where its elements are ones or zeros, and
. Let
be the 3D matrix with all
2D matrices. Each matrix
should select the coordinates
of
that will be sampled by the SB, and which will be rejected. Specifically, we have a matrix
where
represents a transmissive element and
represents a block element. Note that if
,
is sampled, and if
,
is rejected.
Figure 9 shows an example of a binary pattern
of 16 pixels that defines the samples to take in the
spectral band. Note that the binary pattern discards 9 samples.
Let
be the transmittance value of a binary pattern
, where
. This value depends on the percentage of ones in the
2D matrix. The transmittance value of the
is calculated as
where
N are the horizontal pixels and
M the vertical pixels of
. For example,
means that the 20% of the binary pattern are transmissive and the remaining 80% are blocking.
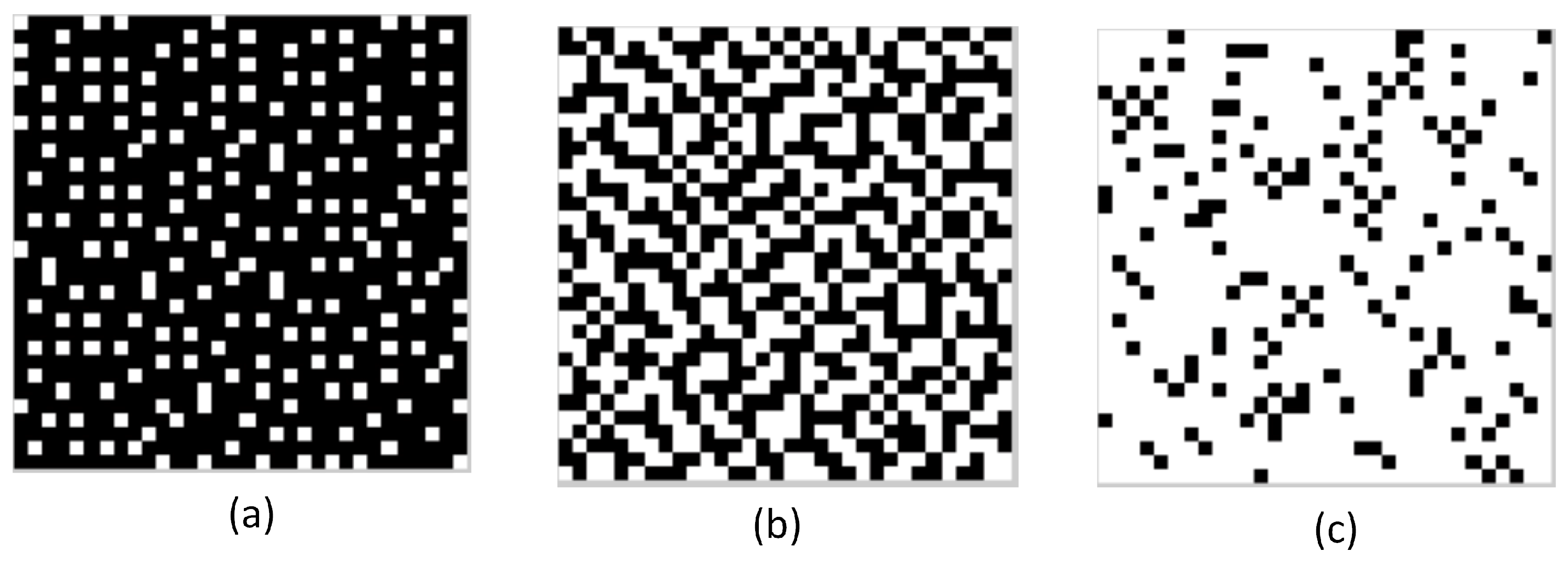
Figure 10 shows three binary patterns with different transmittance values. The binary patterns are constructed following the methodology used in [
12], where the coded apertures are optimally designed using the restricted isometry property (RIP) to provide the optimization criteria.
2.4. CSMC Architectures
In this work, we propose three architectures based on the operation of binary patterns to perform the CSMC. The sampling process is different in each architecture. In architectures one and three, only one binary pattern is designed for all L bands. Therefore, in these cases, the same samples and the same geographic points are selected in all IM. In architecture two there are a binary pattern different for each interference map, therefore, different spectral samples and different geographic points are selected, depending on the map that is being processed.
In CSMC architectures, the main objective is to map all IM in a single 2D matrix called Power Signal Plane Array (PSPA). The key aspect of the CSMC model is the subsequent construction of the IM from the PSPA. Let
be the PSPA matrix, where in architectures one and two,
and
, and in architecture three
and
. The pixels of
matrix are calculated by linear combinations of the voxels of
and
. Specifically the pixels of the matrix
in the three architectures are calculated by
where the Equation (
8a–c) corresponds to architecture one, two and three respectively.
The first architecture is shown in
Figure 11. In this case,
}. For this reason, we can represent
as a 2D matrix. In this architecture the power level information of several geographical points in all the bands is discarded, therefore, it is possible to have an ill-conditioning problem. In the second architecture, shown in
Figure 12,
}. This mean that
is a 3D matrix. Finally, in order to get a closer analogy with the CASSI system, we propose Architecture 3 (
Figure 13), where the PSPA is calculated by the linear combination of displaced data samples. In this case also
corresponds to 2D matrix.
2.5. The IMs Data Cube Construction
In all the architectures, the PSPA matrix can be represented by a one-dimensional vectorized array. Let
be the vectorized representation of the matrix
, which can be rewritten in the form of an underdetermined system of linear equations by
where
is the vectorized representation of the IM data cube
.
is a representation basis and
is the multispectral sensing matrix that accounts for the effects of the binary patterns. Note that (
9) corresponds to the Equation (
1). In multispectral imaging it is common to use the Kronecker representation basis [
12].
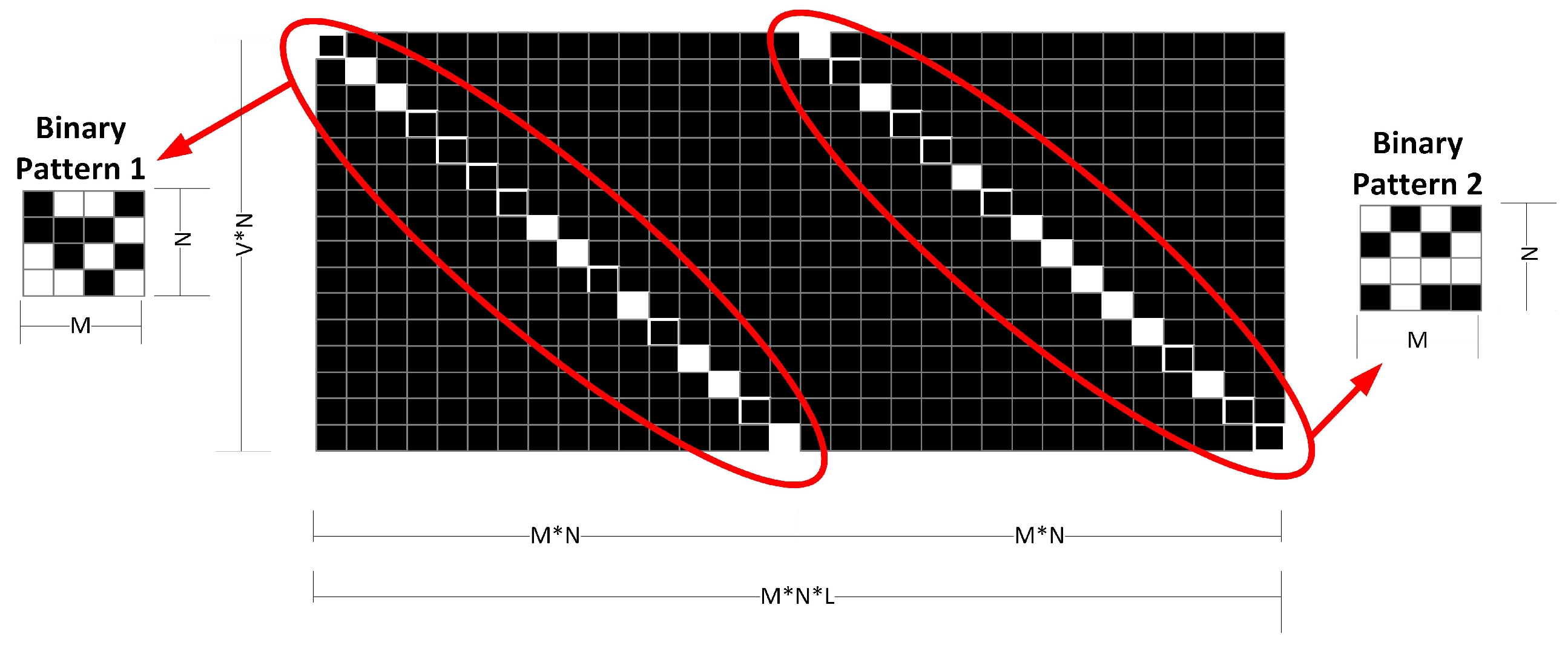
Figure 14 shows the structure of the sensing matrix
in the case where
, and the second architecture is used (
). The diagonal patterns of
correspond to the binary patterns
and
. The structure of
in the architecture one is similar, except that
would be equal to
. In architecture three
, and the second set of diagonal pattern would be displaced.
Several numerical algorithms can be used to solve the inverse problem in Equation (
3) [
19]. We select the Constrained-Split Augmented Lagrangian Shrinkage algorithm: C-SALSA [
20] to construct the IM data cube from compressed measurements. We select C-SALSA because our IM images are characterized by spatial smoothing and the data cube present high spectral correlation. In this case, where total variation (TV) base regularization can be used, C-SALSA was found to be faster than other state-of-the-art methods [
20], therefore, this algorithm is widely used in recent works [
21,
22]. C-SALSA solve the optimization problem
where
is an ellipsoid that corresponds to the feasible set in problem Equation (
3),
In Equation (
10),
is a closed
radius Euclidean ball centered on the origen of
, and
denotes the indicator function of set
,
The SB performs the data cube construction process described in the Algorithm 1.
| Algorithm 1 The general process for building the data cube with the IM |
Require: There are J sensors in the area. There are L spectral bands. There are geographic points.- 1:
The SB requires L IMs (one for each spectral band). - 2:
for do - 3:
The SB defines the samples to request from the using a binary pattern. - 4:
The SB request the samples from the - 5:
end for - 6:
The SB builds the model of the Equation ( 9). - 7:
The SB solves the optimization problem of the Equation ( 10).
|
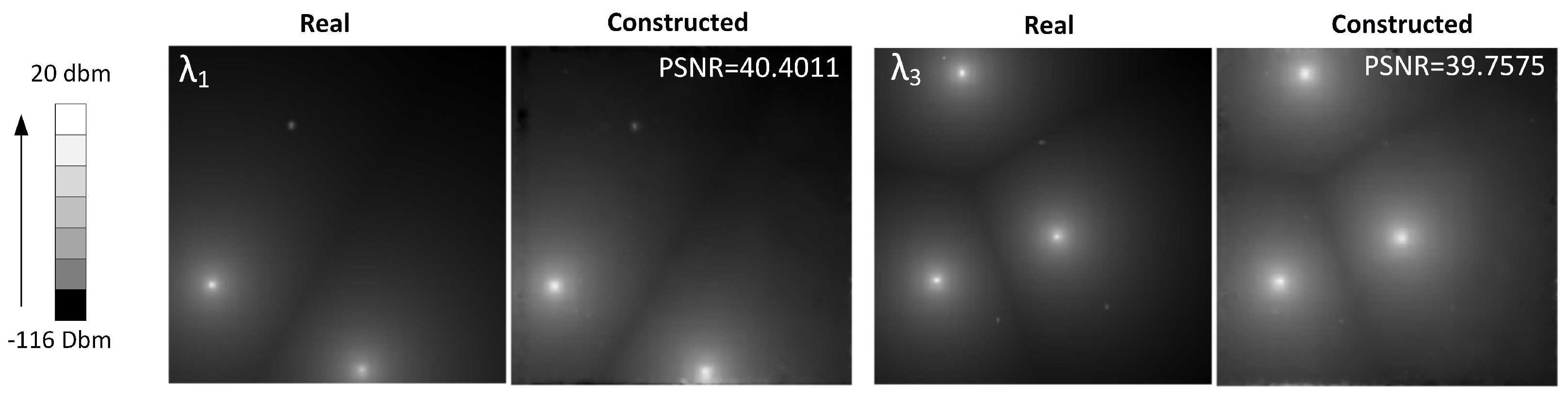
4. Discussion
In the preliminary test of the model, we calculate the PSNR between the real and constructed IM data cubes for all bands. We obtained PSNR values above of 39 dBs, and no artifacts were observed in the reconstructed images.
The data cube construction only involves 50% of the samples of the real data cube, i.e., the binary pattern transmittance is 0.5. In this way, only 50% of the spectral information is sent from the sensors and the SB only calculates 50% of the power levels in the geographical positions.
A considerable reduction is obtained, when the compressive samples are condensed in the PSPA. For example,
Table 1 shows a DR value of 16, which corresponds to a 6.25% of the original amount of data of the 3D cube with 8 bands.
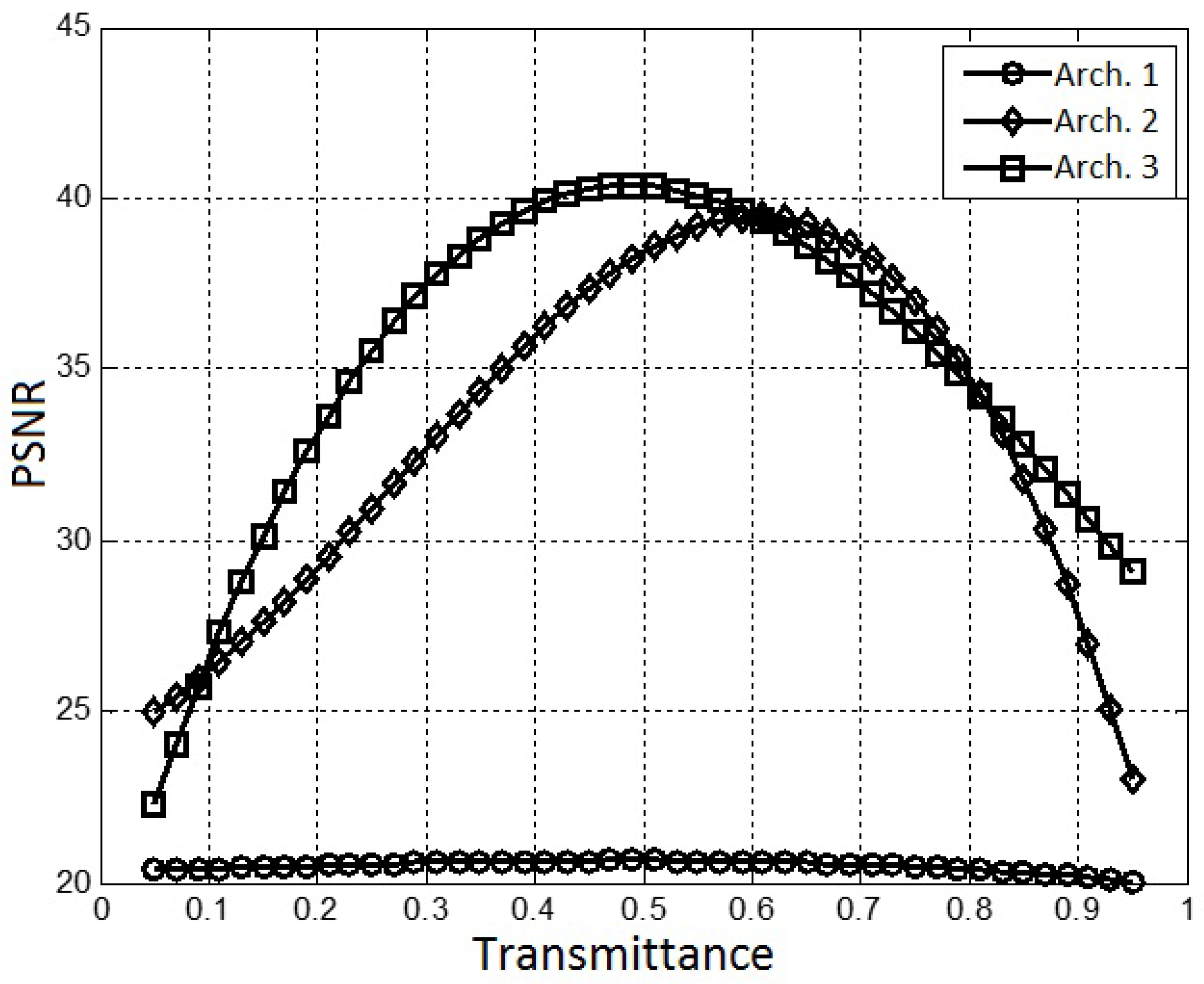
We found that there is a value of transmittance that offers the best data cube construction for each architecture. Our results suggest a transmittance between 0.4 and 0.6 offers the better results, i.e., an increment in the transmittance does not necessarily mean an increment in the performance.
It is important to note that the results shown in
Figure 17 are consistent with the the relationship between the transmittance of the coded apertures and the RIP determined in [
23] for CASSI systems. In [
23] the authors find a mathematical expression for the RIP in CASSI, and determine the transmittance that provides the best value of a constant present in these mathematical expression. They found that the best value for the transmittance is 0.5. Therefore, due the great similarity of our CSMC model with the CASSI model, we can affirm that a value of 0.5 for transmittance will generally be a good choice.
Architecture 1 offers the worst performance because all samples of the bands in specific geographical points are discarded.
Preliminary results allowed us to select the Architecture 2 to test the model under different number of bands and sensors. Unlike Architecture 1, note that Architecture 2 has one binary pattern for each band, which allowed us to select frequency samples for all the sensors in different frequency points of the spectrum.
The original data cube, shown in
Figure 21, has 8 bands with
geographical points, that corresponds to 524.288 samples.
Table 1 shows how the number of data samples required to construct the data cube is greatly reduced. Note that only
samples were required to construct the 524.288 samples data cube, which corresponds to RD=16 for 8 bands.
In our model, the data reduction is constant whatever the number of bands, therefore the DR increases with the number of bands (
Table 2). However, the bigger the number of bands in the data cube, the lower the quality of the constructed map.
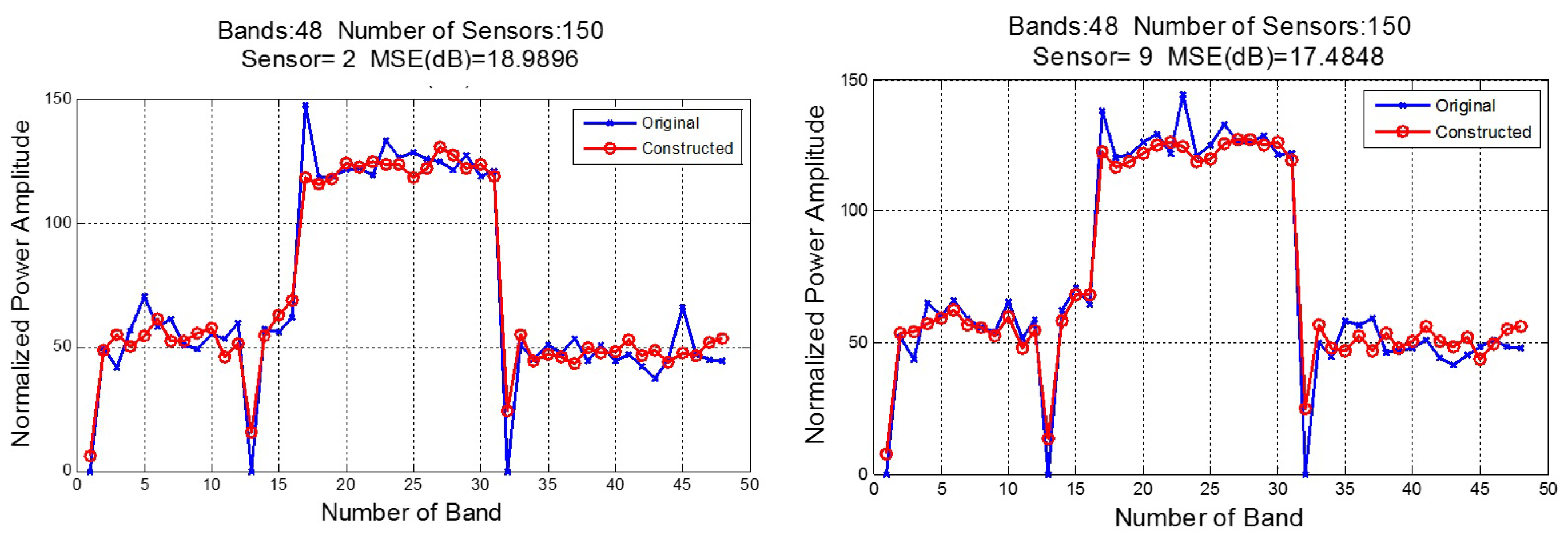
There is a trade-off between decimated rate and construction quality that should be taken into account. The required quality depends on the application. For example, in cases where the spectral signals are used only for establishing whether the channel is busy or free, the reconstruction does not have to be so accurate, in this case, it is only necessary to know if the signal exceeds a fixed threshold. For instance, in
Figure 22, despite the MSE value being around 18 dB, the constructed signal takes the form of the original signal and it is possible to establish an occupation channel criterion.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}