Simultaneous Event-Triggered Fault Detection and Estimation for Stochastic Systems Subject to Deception Attacks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Statement
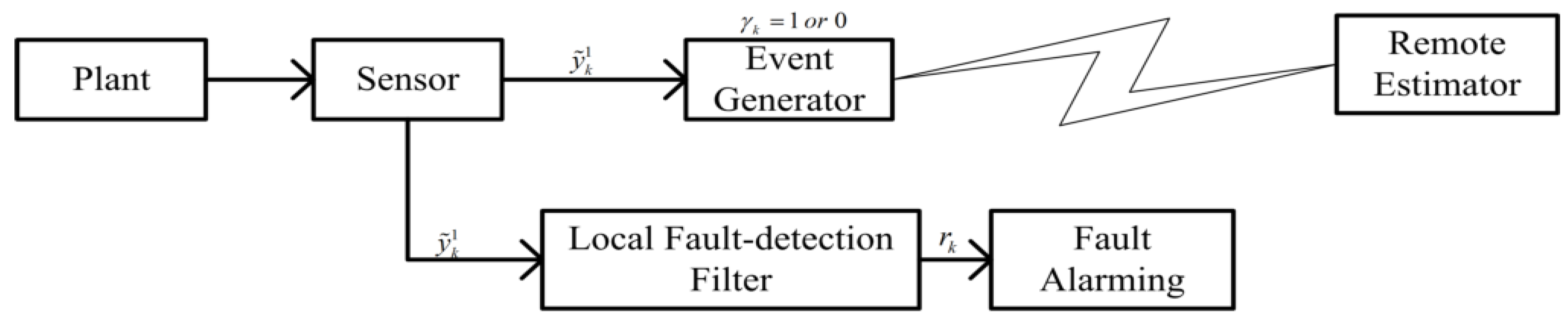
2.1. System Model
2.2. Transforming of the System into Two Subsystems
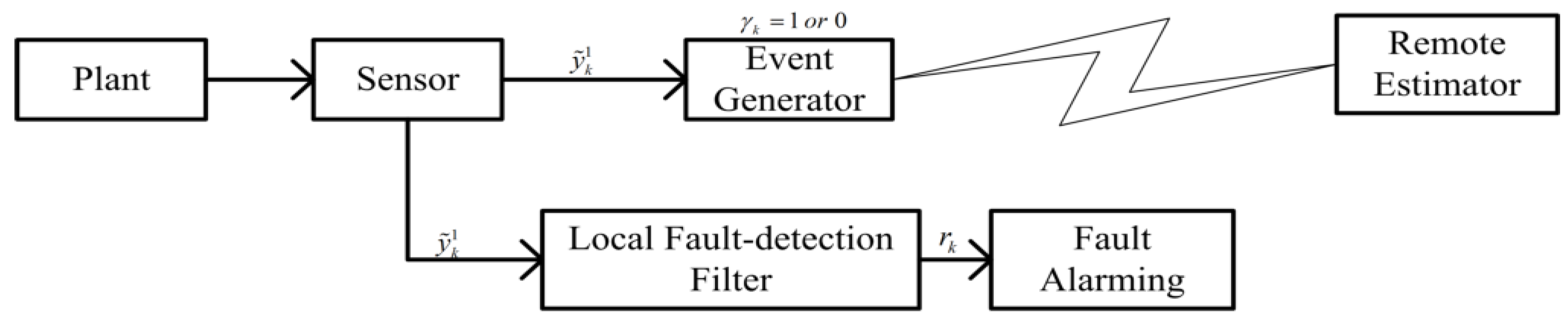
3. Event-Triggered Fault-Detection Strategy Based on Reduce-Order Filter
3.1. Residual Generator
3.2. Fault-Alarming Strategy
| Algorithm 1 Event-triggered fault detection. |
| Step 1: Design a bank of fault-detection filter of the form (13).
Step 2: Compute the fault-detection residuals , and choose a threshold which can be chosen as small as possible theoretically. Step 3: If , there exists no fault and the corresponding fault-alarming is turned off. Step 4: If , the current measurements can be sent to the remote estimator. Step 5: else , the remote estimator cannot receive the measurements to achieve energy saving. Step 6: end if Step 7: else , a fault has occured and the corresponding fault alarming is turned on. For the purpose of detecting system fault in the remote estimator, the current sensor measurements is sent to the remote estimator without entering the event-triggered decision. Step 8: end if Step 9: end |
4. Co-Design Scheme of Fault Estimator and Event-Triggered Generator
| Algorithm 2 Recursive algorithm of the event-triggered remote fault estimation. |
| Set the initial conditions , , , , , and ; |
|
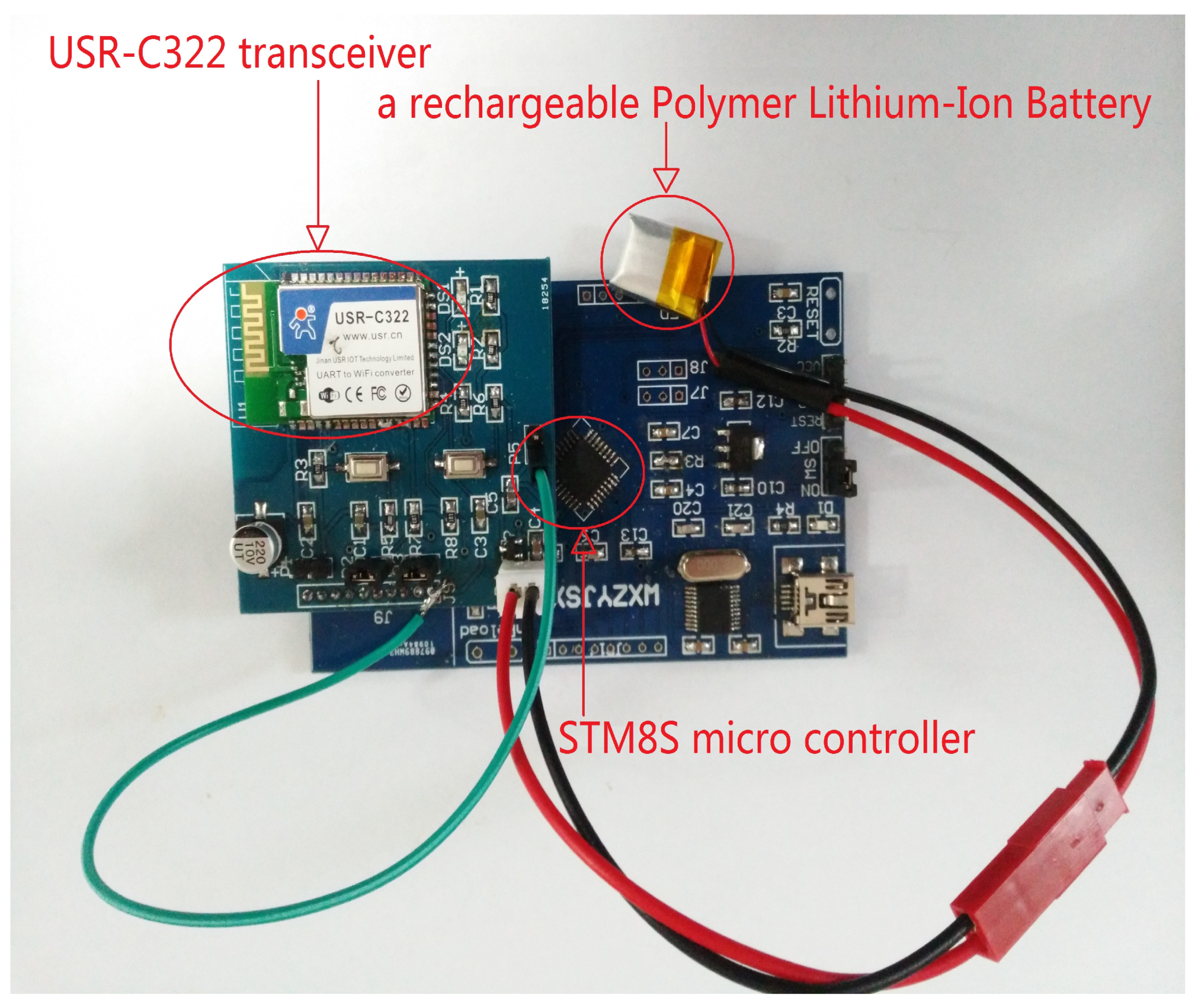
5. Experimental Verification
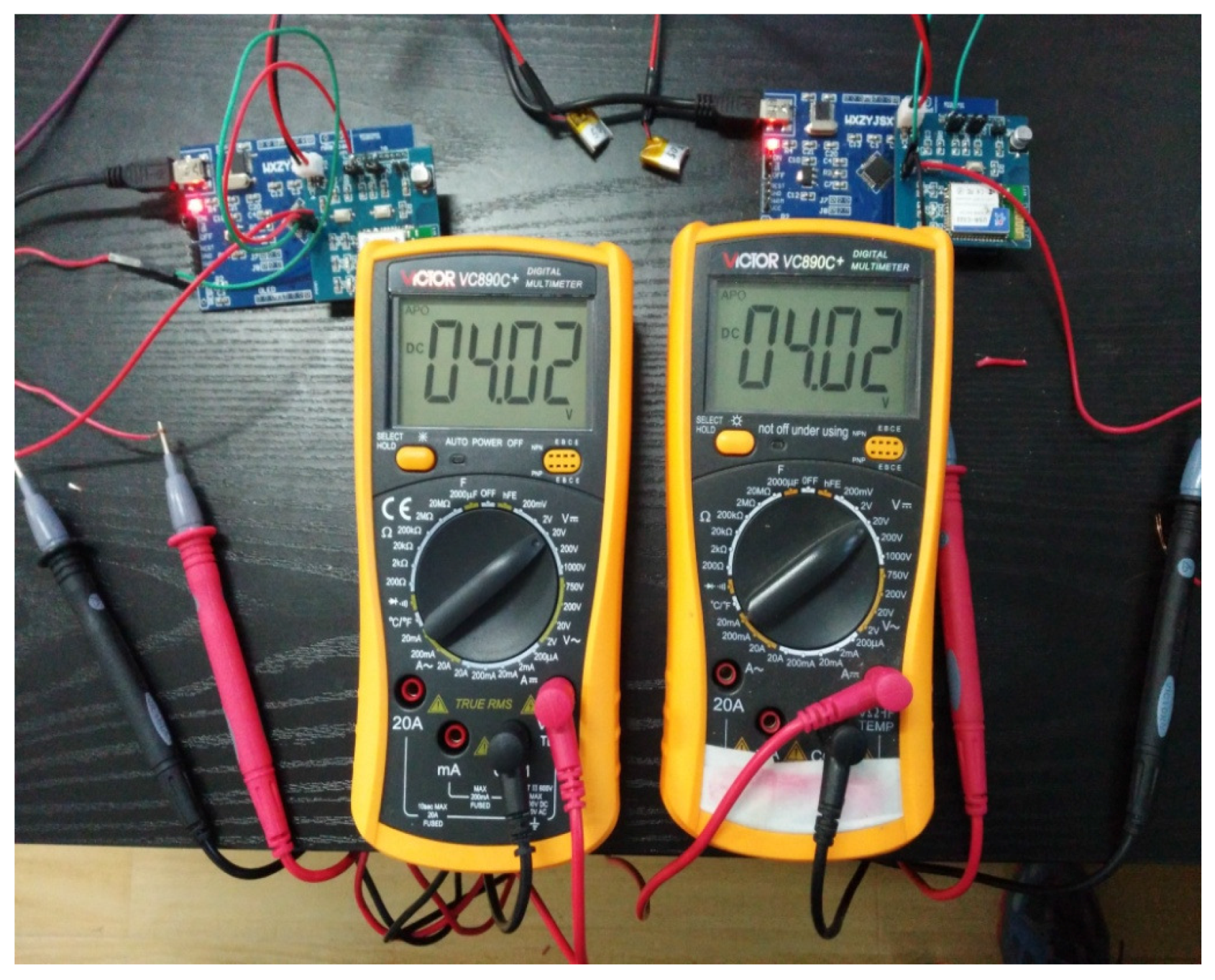
5.1. Experimental Setup
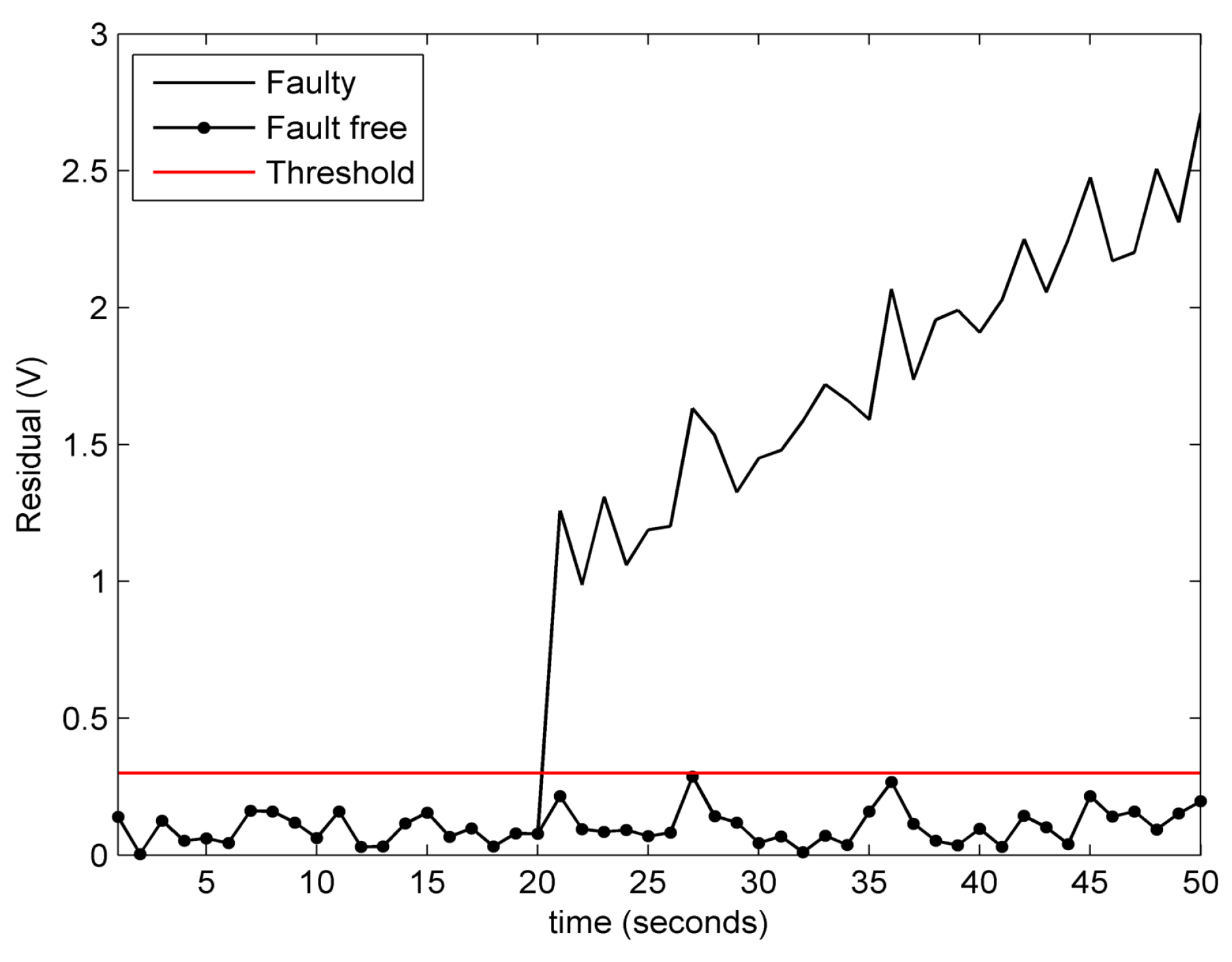
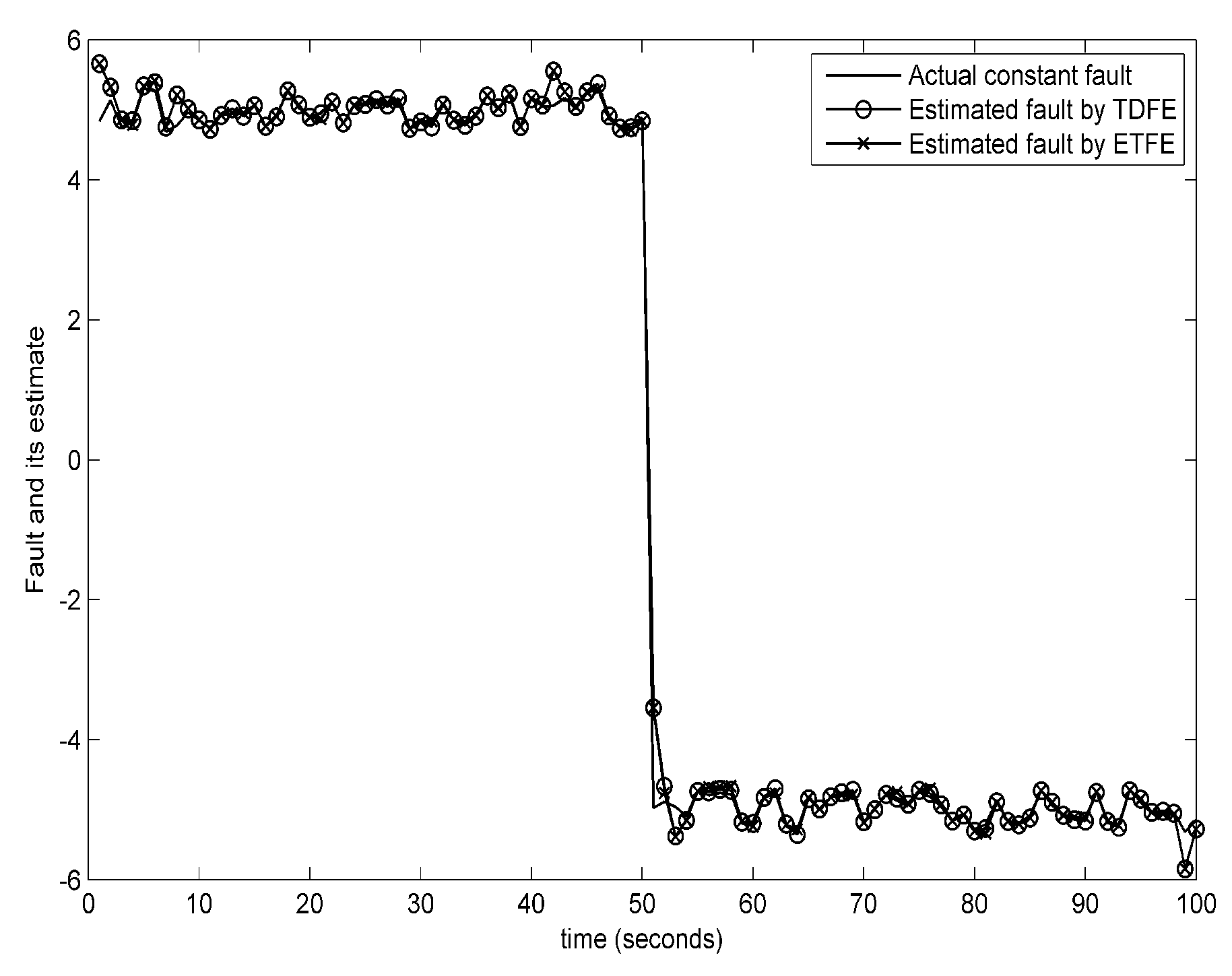
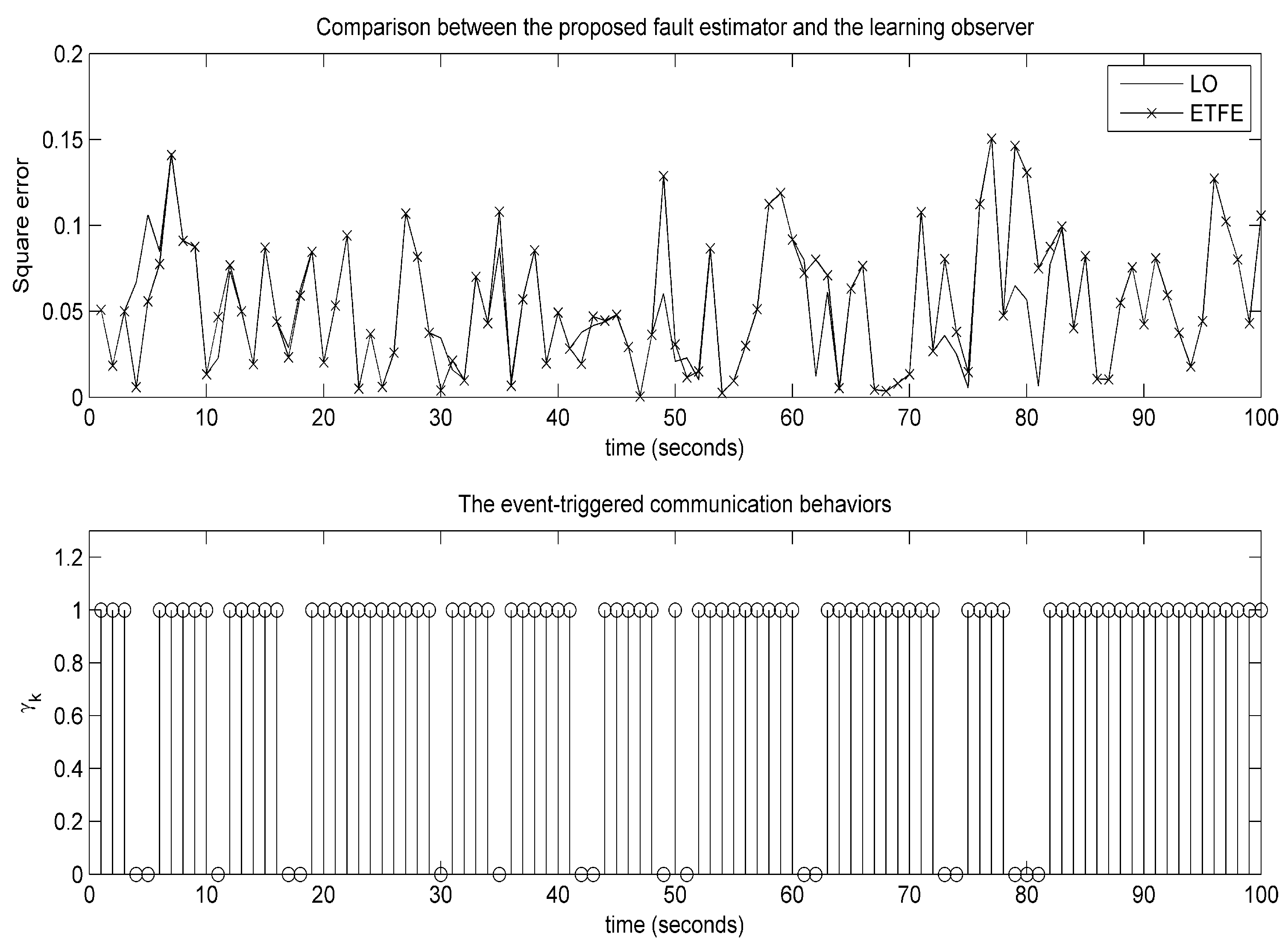
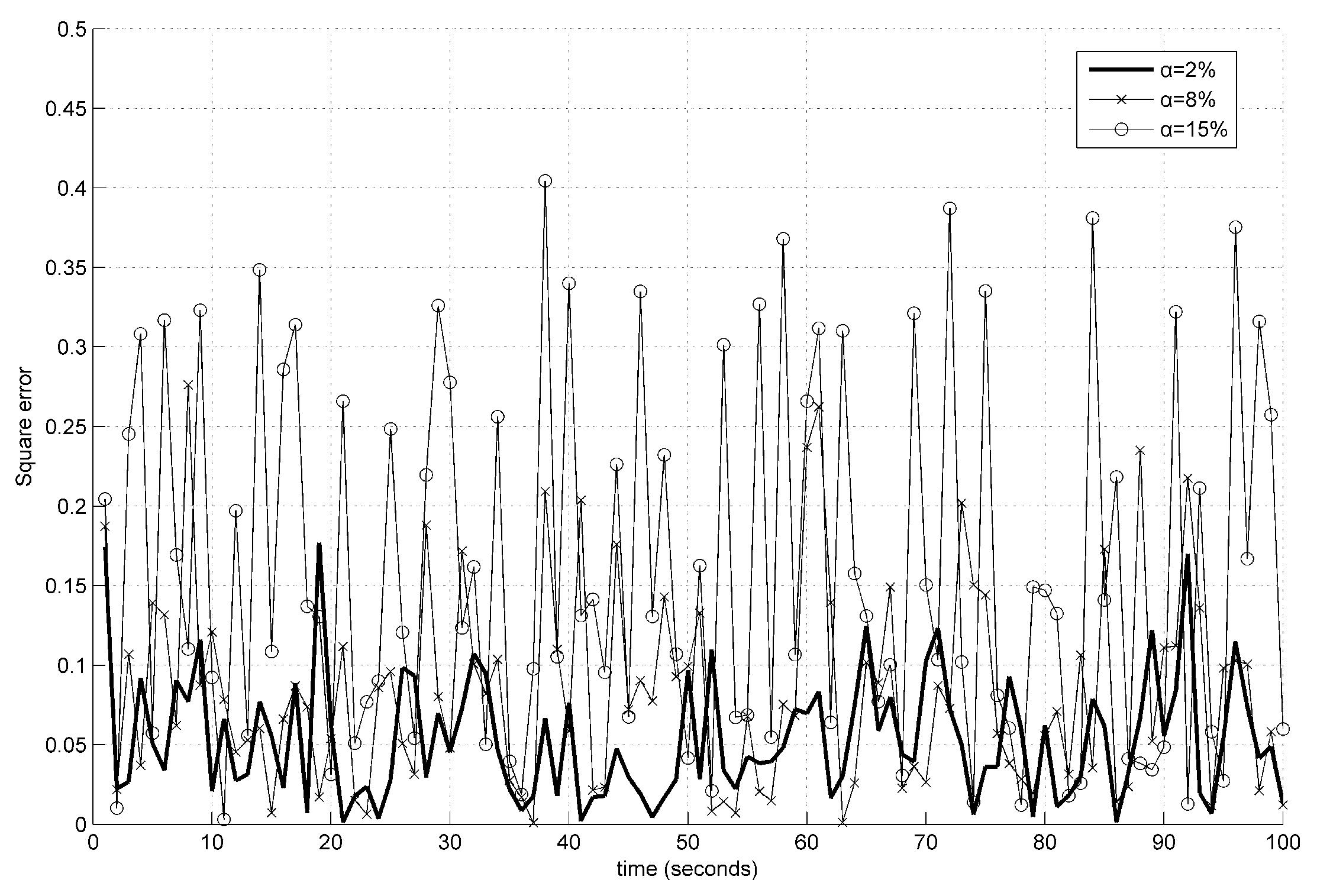
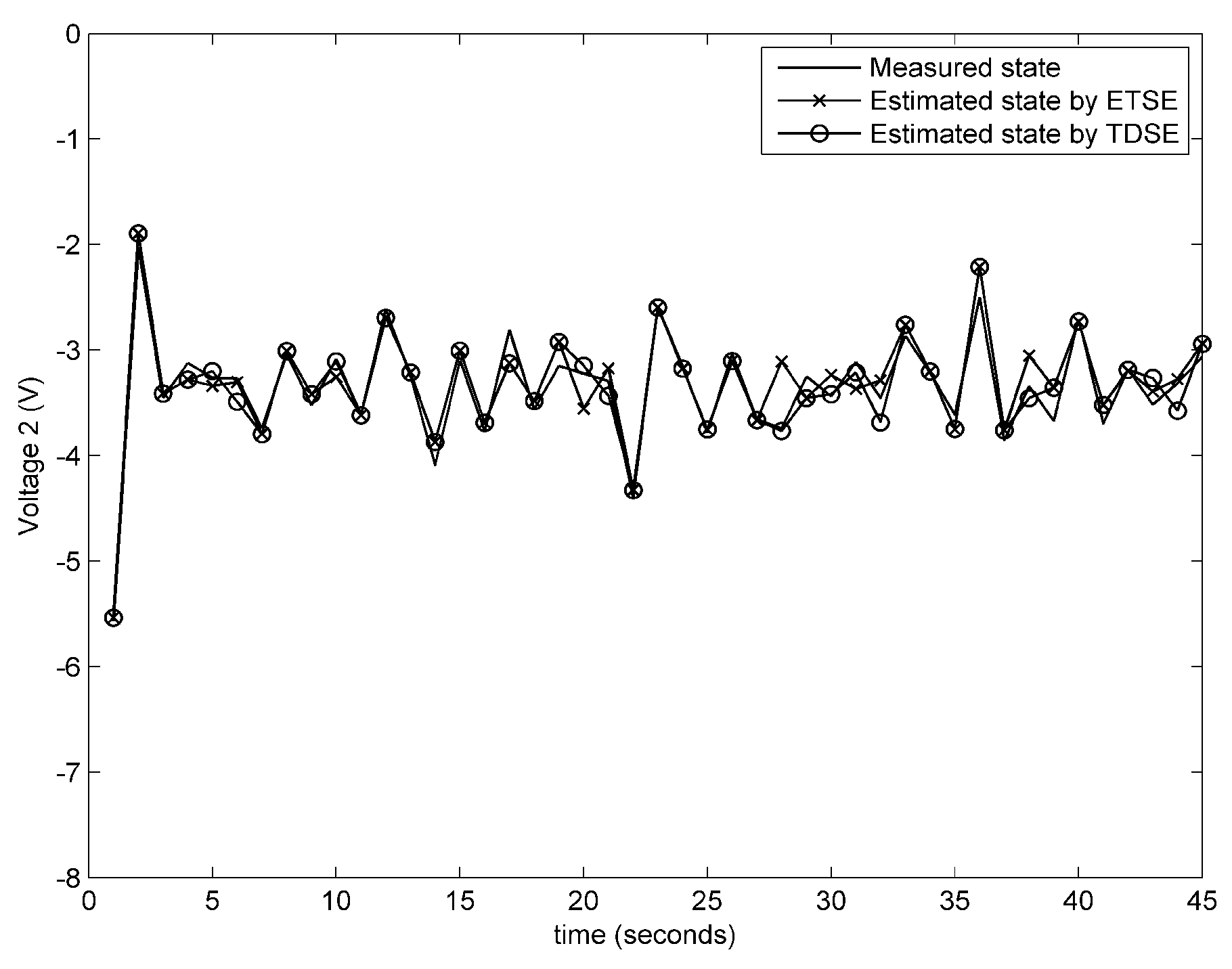
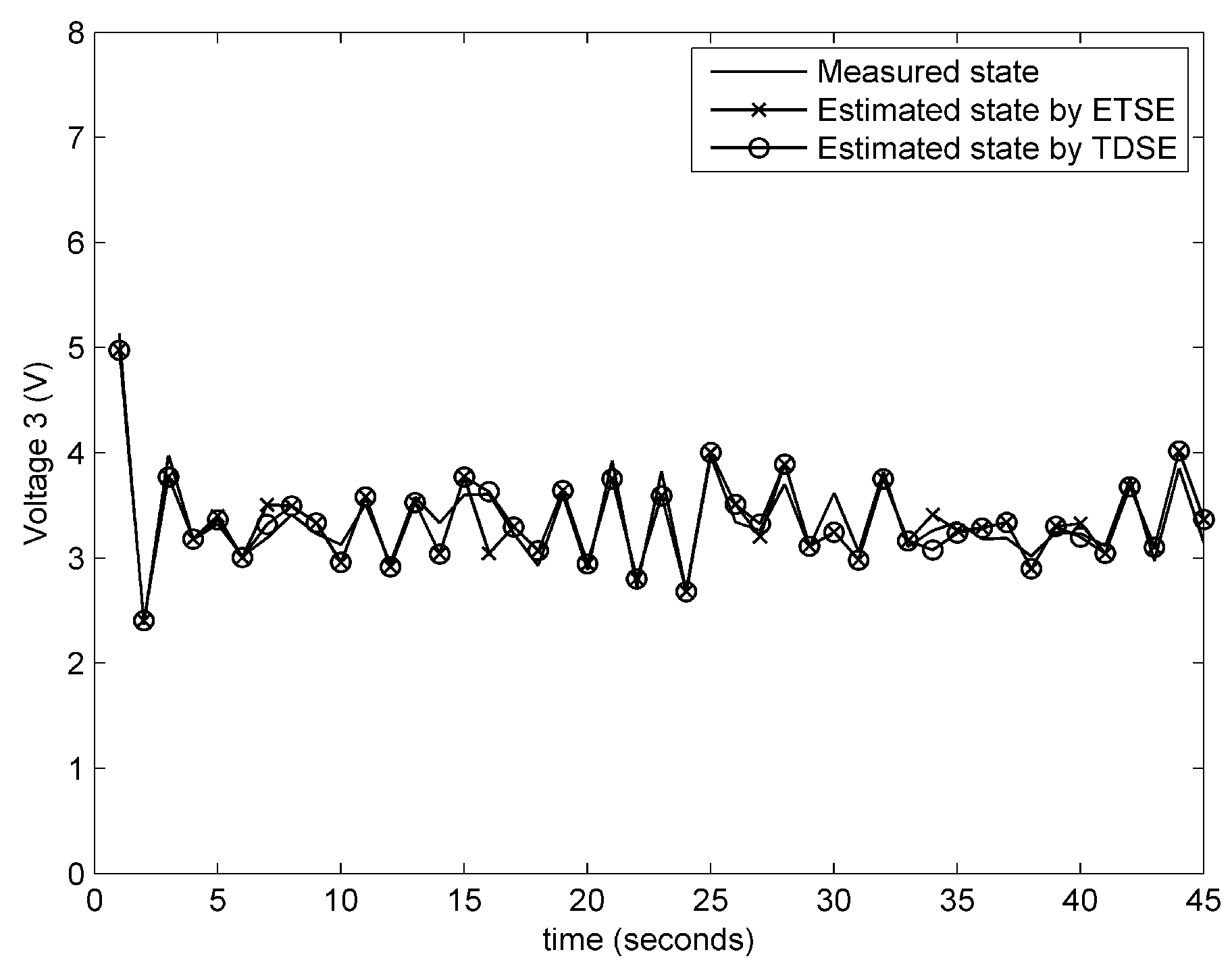
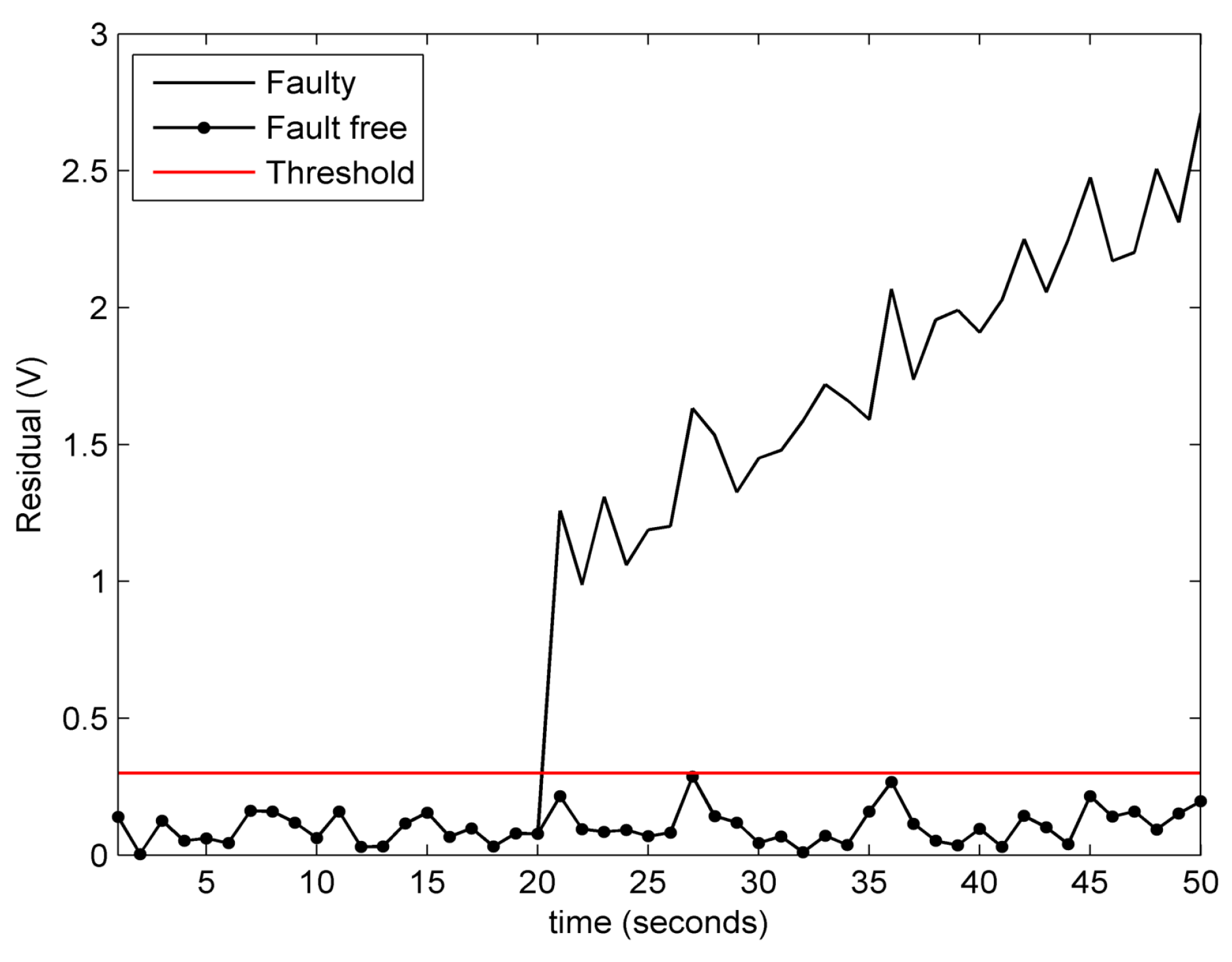
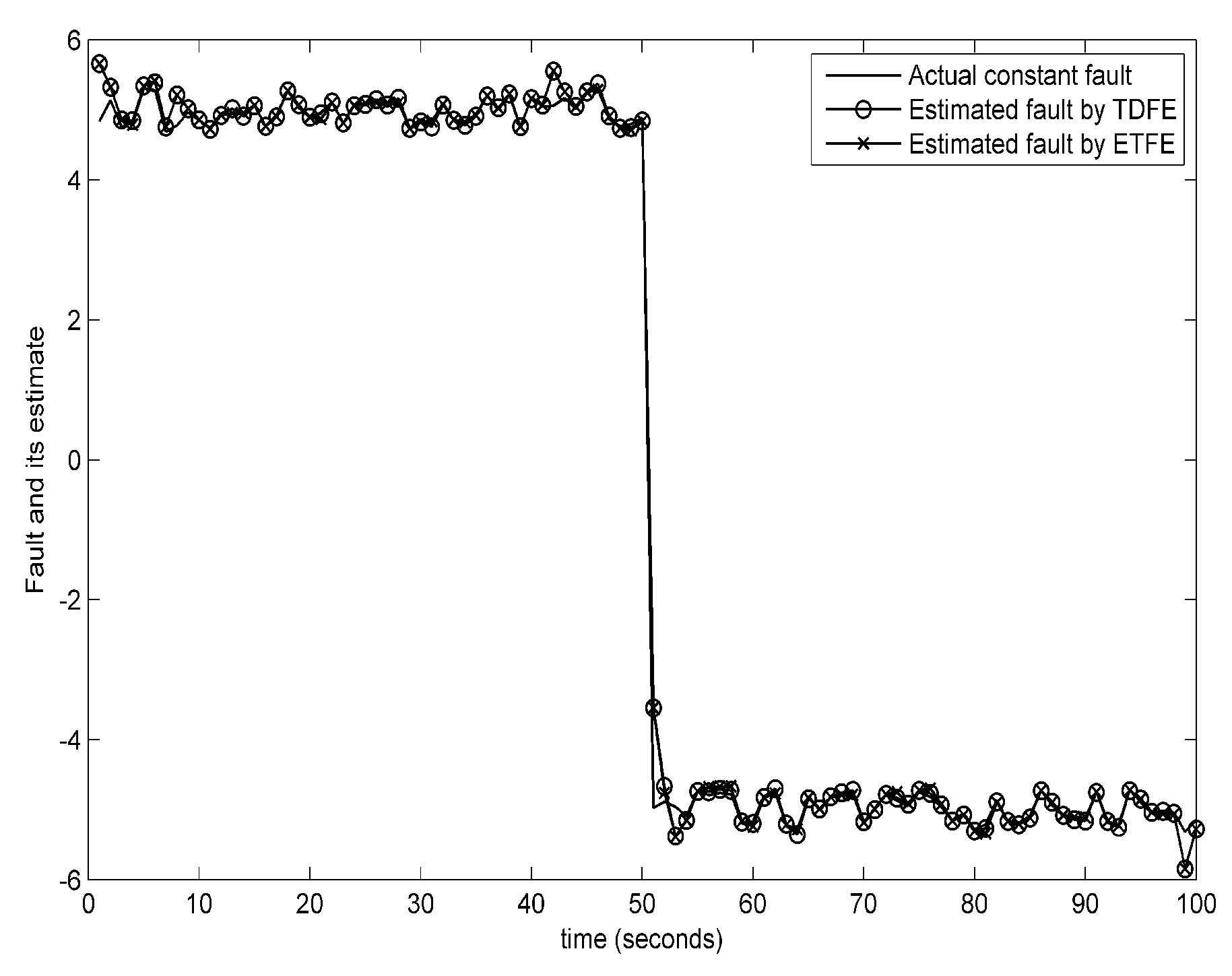
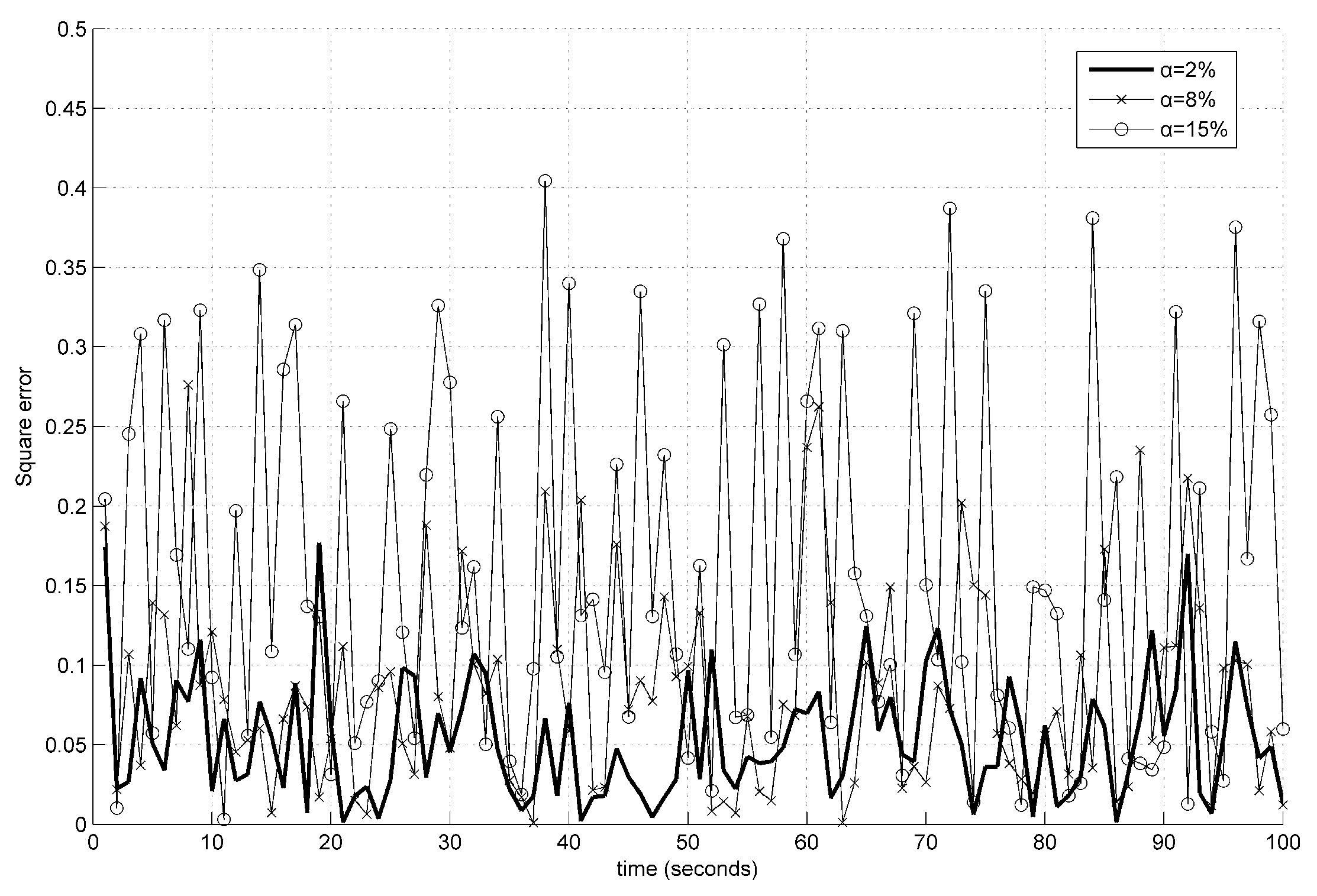
5.2. Experimental Results
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pandey, A.; Tripathi, R.C. A Survey on Wireless Sensor Networks Security. Int. J. Comput. Appl. 2010, 3, 43–49. [Google Scholar] [CrossRef]
- Tubaishat, M.; Madria, S. Sensor networks: An overview. IEEE Potentials 2003, 22, 20–23. [Google Scholar] [CrossRef]
- Rawat, P.; Singh, K.D.; Chaouchi, H.; Bonnin, J.M. Wireless sensor networks: A survey on recent developments and potential synergies. J. Supercomput. 2014, 68, 1–48. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Z.; Shen, B.; Alsaadi, F.E. Security-guaranteed filtering for discrete-time stochastic delayed systems with randomly occurring sensor saturations and deception attacks. Int. J. Robust Nonlinear Control 2017, 27, 1194–1208. [Google Scholar] [CrossRef]
- Ma, L.; Wang, Z.; Han, Q.L.; Lam, H.K. Variance-Constrained Distributed Filtering for Time-Varying Systems with Multiplicative Noises and Deception Attacks over Sensor Networks. IEEE Sens. J. 2017, 17, 2279–2288. [Google Scholar] [CrossRef]
- Ding, D.; Wang, Z.; Ho, D.W.C.; Wei, G. Observer-Based Event-Triggering Consensus Control for Multiagent Systems with Lossy Sensors and Cyber-Attacks. IEEE Trans. Cybern. 2017, 47, 1936–1947. [Google Scholar] [CrossRef]
- Jia, Q.; Chen, W.; Zhang, Y.; Li, H. Fault reconstruction and fault-tolerant control via learning observers in Takagi-Sugeno fuzzy descriptor systems with time delays. IEEE Trans. Ind. Electron. 2015, 62, 3885–3895. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, W.; Chen, X.; Jia, Q. Robust fault reconstruction via learning observers in linear parameter-varying systems subject to loss of actuator effectiveness. IET Control Theory Appl. 2014, 8, 42–50. [Google Scholar] [CrossRef]
- Chen, W.; Saif, M. An iterative learning observer for fault detection and accommodation in nonlinear time-delay systems. Int. J. Robust Nonlinear Control 2006, 16, 1–19. [Google Scholar] [CrossRef]
- Alavi, S.M.M.; Saif, M. Fault detection in nonlinear stable systems over lossy networks. IEEE Trans. Control Syst. Technol. 2013, 21, 2129–2142. [Google Scholar] [CrossRef]
- Chen, W.; Chen, W.T.; Saif, M.; Li, M.F.; Wu, H. Simultaneous Fault Isolation and Estimation of Lithium-Ion Batteries via Synthesized Design of Luenberger and Learning Observers. IEEE Trans. Control Syst. Technol. 2014, 22, 290–298. [Google Scholar] [CrossRef]
- Li, F.; Shi, P.; Lim, C.C.; Wu, L. Fault detection filtering for nonhomogeneous markovian jump systems via fuzzy approach. IEEE Trans. Fuzzy Syst. 2017. [Google Scholar] [CrossRef]
- Chadli, M.; Abdo, A.; Ding, S.X. H-/H∞ fault detection filter design for discrete-time Takagi-Sugeno fuzzy system. Automatica 2013, 49, 1996–2005. [Google Scholar] [CrossRef]
- Chibani, A.; Chadli, M.; Peng, S.; Braiek, N.B. Fuzzy fault detection filter design for t-s fuzzy systems in finite frequency domain. IEEE Trans. Fuzzy Syst. 2017. [Google Scholar] [CrossRef]
- Youssef, T.; Chadli, M.; Karimi, H.R.; Wang, R. Actuator and sensor faults estimation based on proportional integral observer for TS fuzzy model. J. Franklin Inst. 2017, 354, 2524–2542. [Google Scholar] [CrossRef]
- Shi, P.; Zhang, Y.; Chadli, M.; Agarwal, R.K. Mixed H-Infinity and Passive Filtering for Discrete Fuzzy Neural Networks With Stochastic Jumps and Time Delays. IEEE Trans. Neural Networks Learn. Syst. 2016, 27, 903–909. [Google Scholar] [CrossRef]
- Chibani, A.; Chadli, M.; Braiek, N.B. A sum of squares approach for polynomial fuzzy observer design for polynomial fuzzy systems with unknown inputs. Int. J. Control Autom. Syst. 2016, 14, 323–330. [Google Scholar] [CrossRef]
- Meng, X.; Chen, T. Optimal sampling and performance comparison of periodic and event based impulse control. IEEE Trans. Autom. Control 2012, 57, 3252–3259. [Google Scholar] [CrossRef]
- Guinaldo, M.; Fábregas, E.; Farias, G.; Dormido-Canto, S.; Chaos, D.; Sánchez, J.; Dormido, S. A mobile robots experimental environment with event-based wireless communication. Sensors 2013, 13, 9396–9413. [Google Scholar] [CrossRef]
- Chen, T.; Meng, X. Event triggered robust filter design for discrete-time systems. IET Control Theory Appl. 2014, 8, 104–113. [Google Scholar] [CrossRef]
- Liu, J.; Yue, D. Event-based fault detection for networked systems with communication delay and nonlinear perturbation. J. Franklin Inst. 2013, 350, 2791–2807. [Google Scholar] [CrossRef]
- Hajshirmohamadi, S.; Davoodi, M.; Meskin, N.; Sheikholeslam, F. Event-triggered fault detection and isolation for discrete-time linear systems. IET Control Theory Appl. 2016, 10, 526–533. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z.; Wu, L.; Lam, H.-K.; Du, H. Event-Triggered Fault Detection of Nonlinear Networked Systems. IEEE Trans. Cybern. 2017, 47, 1041–1052. [Google Scholar] [CrossRef]
- Corless, M.; Tu, J. State and input estimation for a class of uncertain systems. Automatica 1998, 34, 757–764. [Google Scholar] [CrossRef]
- Chen, W.; Chowdhury, F.N. A synthesized design of sliding-mode and Luenberger observers for early detection of incipient faults. Int. J. Adapt. Control Signal Process. 2010, 24, 1021–1035. [Google Scholar] [CrossRef]
- Mao, J.; Ding, D.; Song, Y.; Liu, Y.; Alsaadi, F.E. Event-based recursive filtering for time-delayed stochastic nonlinear systems with missing measurements. Signal Process. 2017, 134, 158–165. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006; ISBN 0471708585. [Google Scholar]
- Chang, J.L. Applying discrete-time proportional integral observers for state and disturbance estimations. IEEE Trans. Autom. Control 2005, 51, 814–818. [Google Scholar] [CrossRef]
- Hu, J.; Liu, S.; Ji, D.; Li, S. On co-design of filter and fault estimator against randomly occurring nonlinearities and randomly occurring deception attacks. Int. J. Gen. Syst. 2016, 45, 619–632. [Google Scholar] [CrossRef]
- Heemels, W.P.M.H.; Johansson, K.H.; Tabuada, P. An introduction to event-triggered and self-triggered control. In Proceedings of the IEEE Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012; pp. 3270–3285. [Google Scholar]
- Miskowicz, M. Send-On-Delta Concept: An Event-Based Data Reporting Strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- USR-C322 Instructions, USR IOT Experts. Available online: http://www.usriot.com/p/ti-wifi-module/ (accessed on 30 November 2017).
- STM8S105 Instructions, STMicroelectronics. Available online: http://www2.st.com/content/st_com/en/products/ (accessed on 30 November 2017).
- Chen, W.; Chowdhury, F.N. Simultaneous identification of time-varying parameters and estimation of system states using iterative learning observers. Int. J. Syst. Sci. 2007, 38, 39–45. [Google Scholar] [CrossRef]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Wu, Q.; Peng, L. Simultaneous Event-Triggered Fault Detection and Estimation for Stochastic Systems Subject to Deception Attacks. Sensors 2018, 18, 321. https://doi.org/10.3390/s18020321
Li Y, Wu Q, Peng L. Simultaneous Event-Triggered Fault Detection and Estimation for Stochastic Systems Subject to Deception Attacks. Sensors. 2018; 18(2):321. https://doi.org/10.3390/s18020321
Chicago/Turabian StyleLi, Yunji, QingE Wu, and Li Peng. 2018. "Simultaneous Event-Triggered Fault Detection and Estimation for Stochastic Systems Subject to Deception Attacks" Sensors 18, no. 2: 321. https://doi.org/10.3390/s18020321
APA StyleLi, Y., Wu, Q., & Peng, L. (2018). Simultaneous Event-Triggered Fault Detection and Estimation for Stochastic Systems Subject to Deception Attacks. Sensors, 18(2), 321. https://doi.org/10.3390/s18020321