Model of a Light Extinction Sensor for Assessing Wear Particle Distribution in a Lubricated Oil System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Incomplete sampling, Section 6.1, shows how particle spatial position and aperture dimension influence the probability of particles being only partially sampled.
- (2)
- Particle concentration, Section 6.2, shows how a high concentration of identically sized particles may be sampled simultaneously, making them appear larger than their true size.
- (3)
- Influence of measurement noise is investigated in Section 6.3, where it is shown how different noise levels may influence particle size evaluation, when using a simple amplitude-based detection algorithm. Each subsection in Section 6 also contains a discussion of the obtained results, while conclusions are made in Section 7.
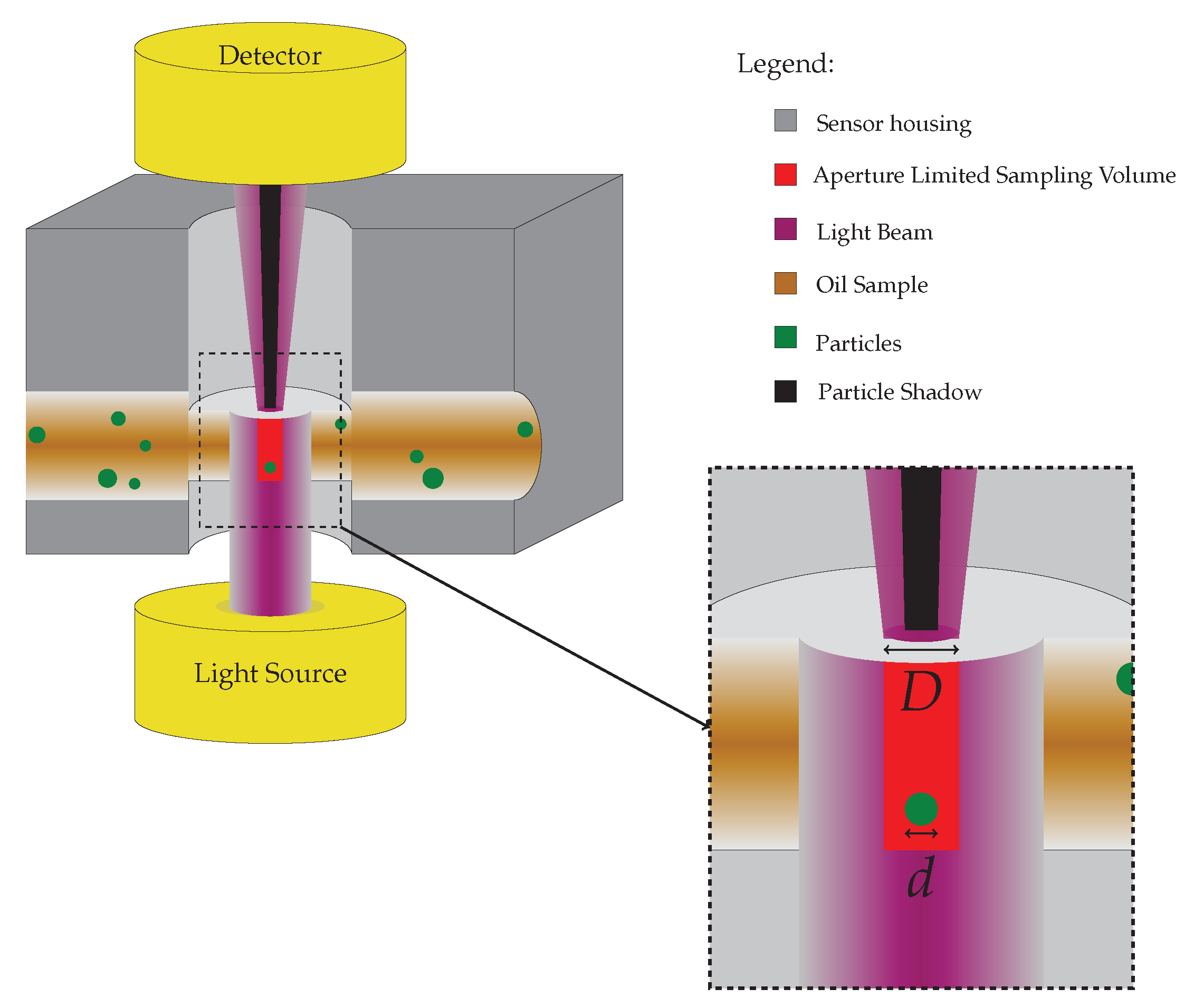
2. Introduction to Working Principle of Light Extinction Based OPCs
3. Theory
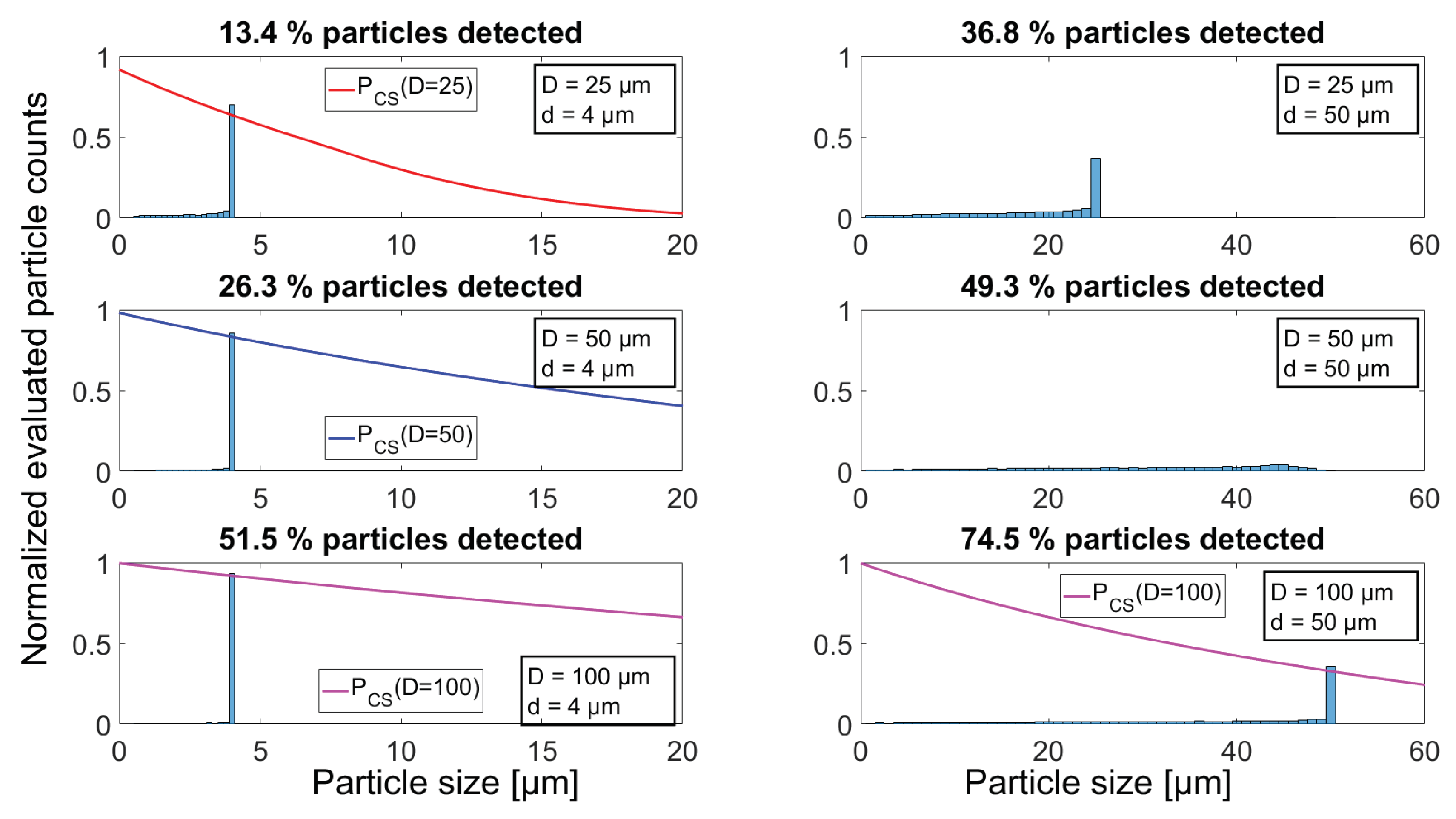
3.1. Incomplete Sampling
4. Simulation Tool
5. Algorithm for Particle Detection
- The first particle, arriving after approximately , has a diameter of 6 , and is placed far enough from the second particle, arriving after approximately , to be sampled individually.
- The next three particles arriving at 0.12–0.2 consists of a 6, 10 and 4 particle, which are positioned close to one another, but are still separable for the algorithm.
- Lastly, a 4 and 6 particle are passed through the sampling volume, with the distance between them so small that the algorithm only detects a single 6 particle, in the time window from ≈0.27 to .
6. Results
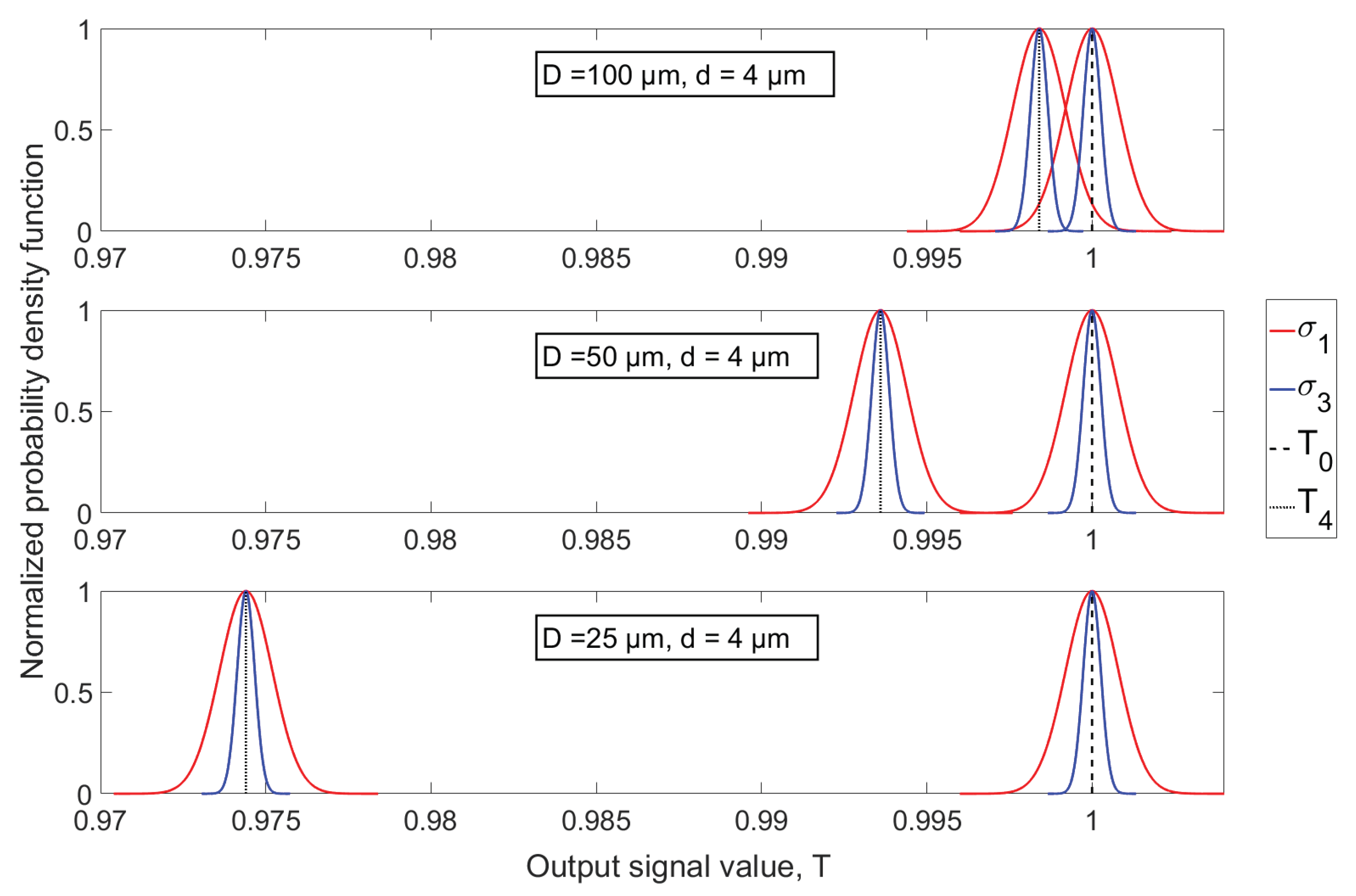
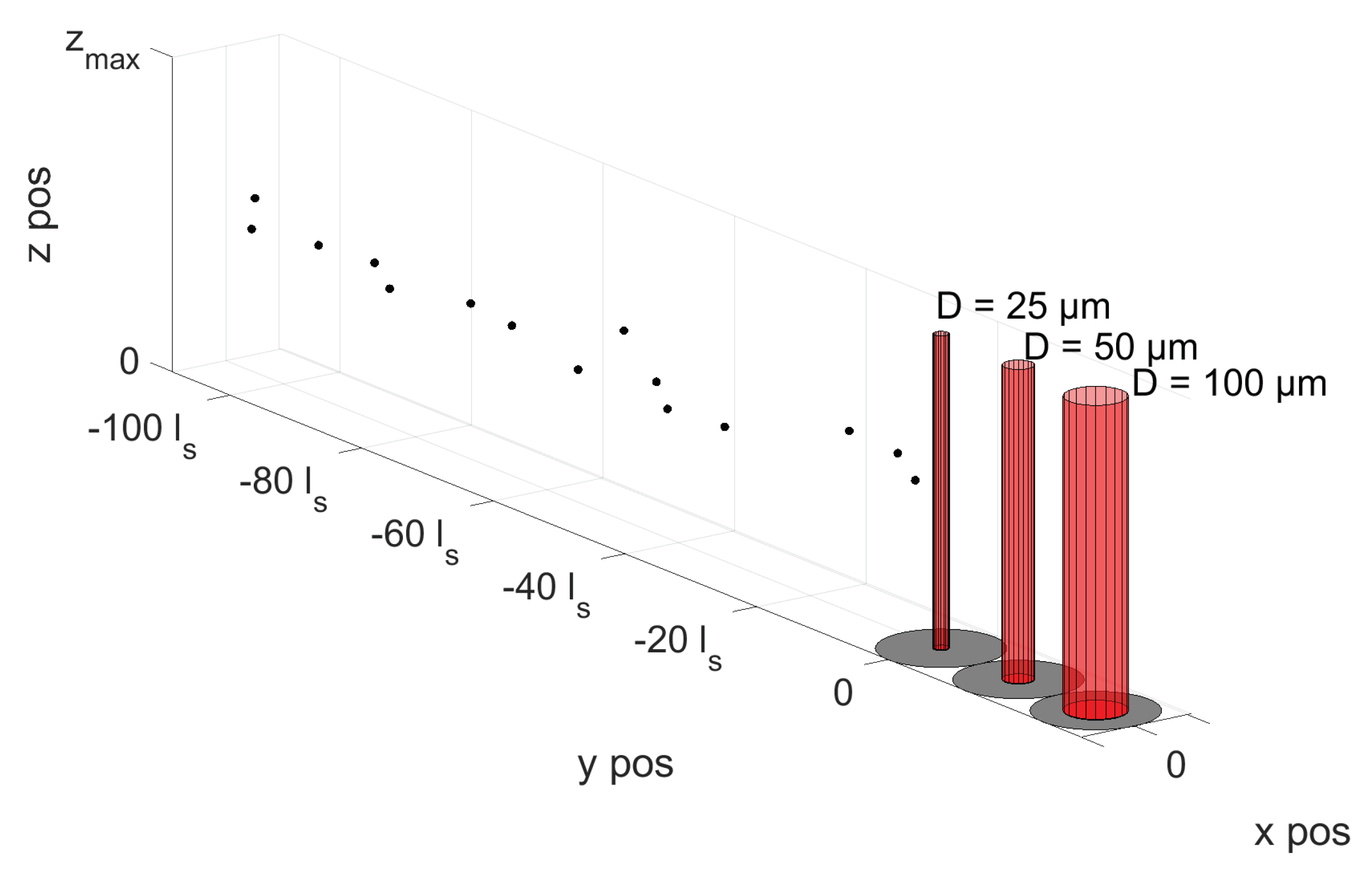
6.1. Incomplete Sampling of Particles
- A uniform probability distribution governs the y-position of the particles (direction of flow), with the constraint that subsequent particles are placed far enough from each other to avoid simultaneous sampling.
- A uniform probability distribution governs particle position in the x-direction, within a defined range of , thus resulting in a number of particles to pass the aperture without intercepting the sampling volume.
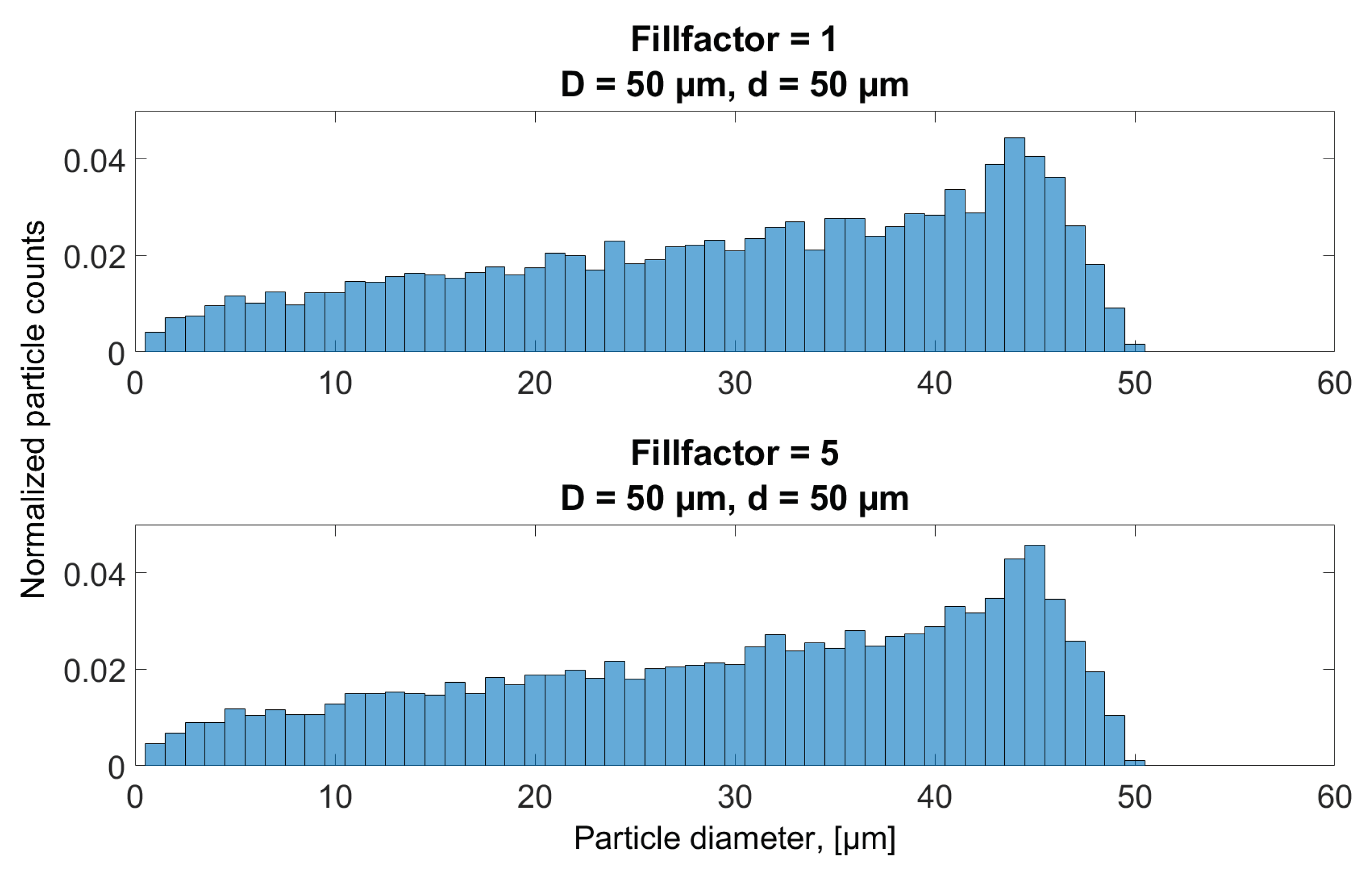
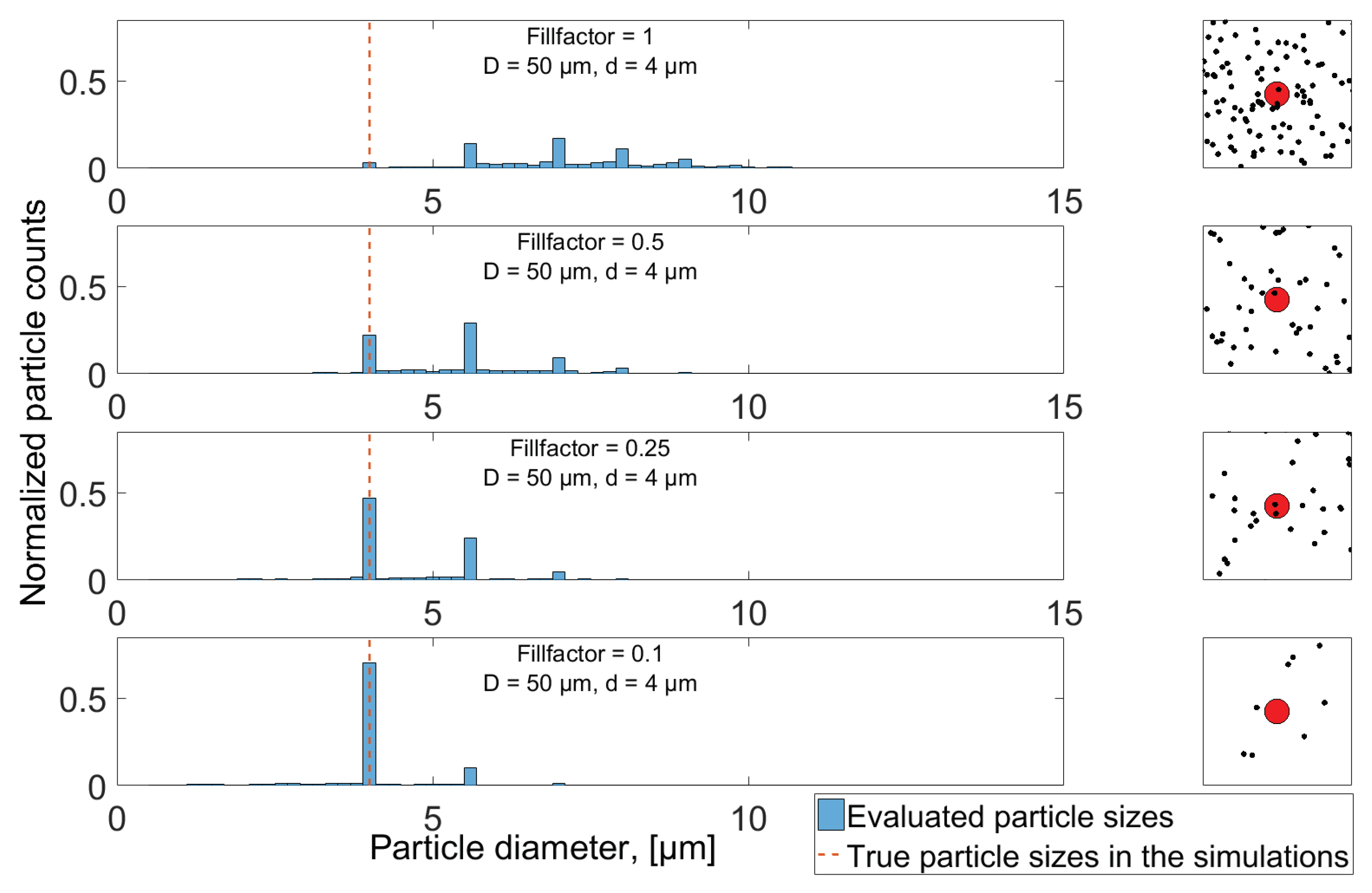
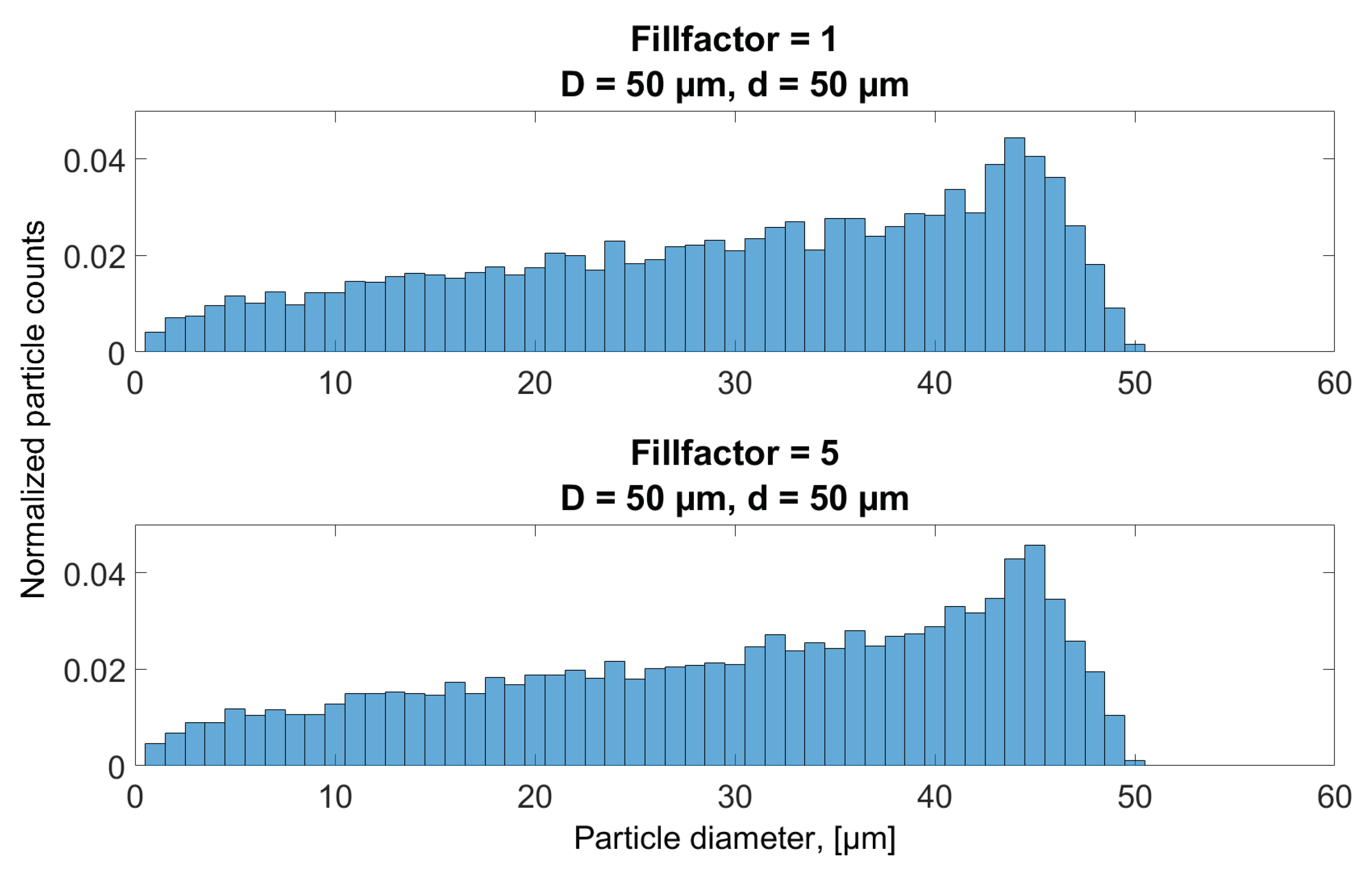
6.2. Particle Concentration Influence on Size Evaluation
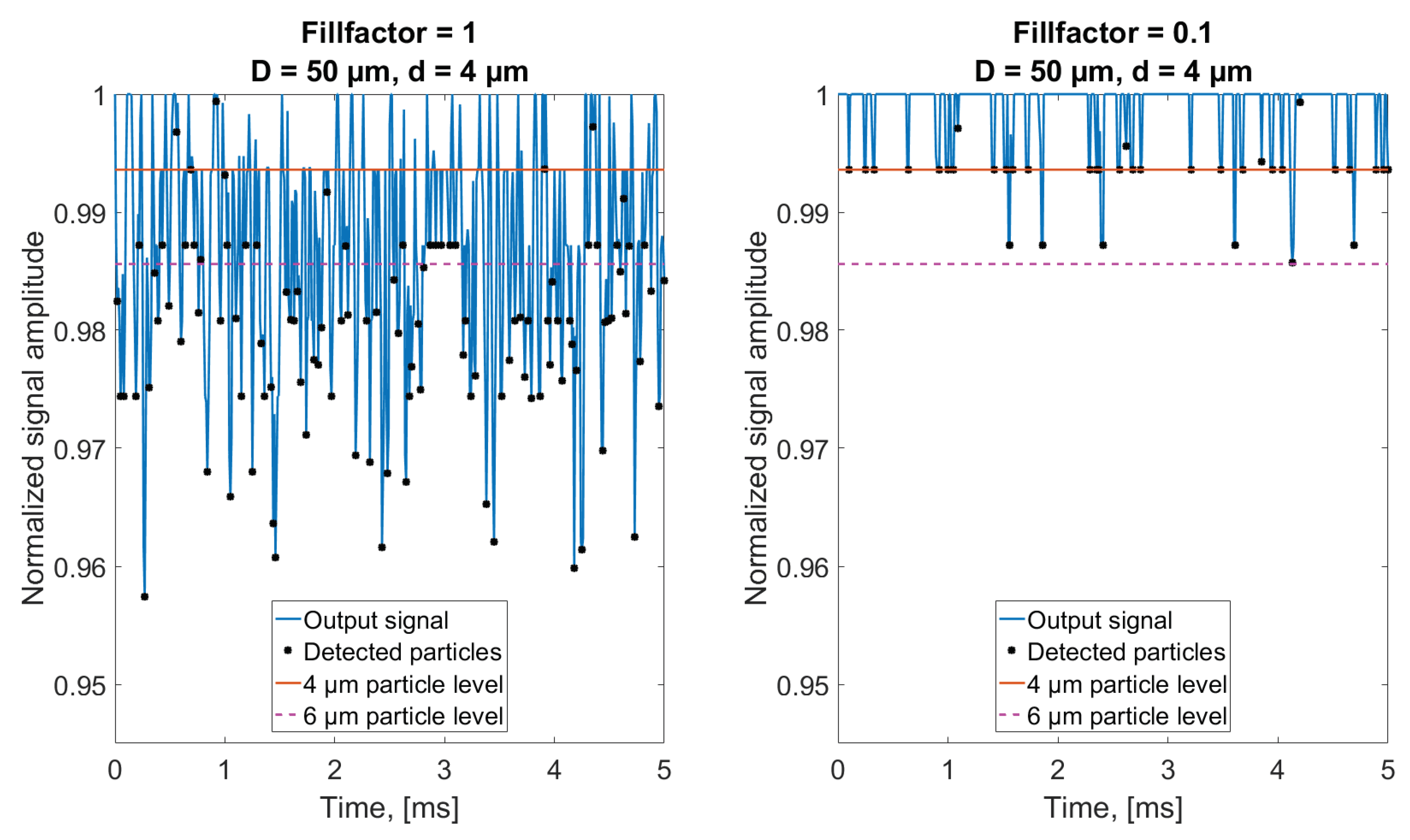
6.3. The Influence of Measurement Noise
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| OPC | Optical Particle Counter |
| ISO | International Organization for Standardization |
| SNR | Signal-to-Noise Ratio |
References
- Zhu, J.; He, D.; Bechhoefer, E. Survey of Lubrication Oil Condition Monitoring, Diagnostics, Prognostics Techniques and Systems. J. Chem. Sci. Technol. 2013, 2, 100–115. [Google Scholar]
- Kumar, A.; Gosh, S.K. Oil condition monitoring for HEMM—A case study. Ind. Lubr. Tribol. 2016, 68, 718–722. [Google Scholar] [CrossRef]
- Henneberg, M.; Jørgensen, B.; Eriksen, R.L. Oil condition monitoring of gears onboard ships using a regression approach for multivariate T2 control charts. J. Process Control 2016, 46, 1–10. [Google Scholar] [CrossRef]
- Krasmik, V.; Röbken, N.; Martin, C.; Martin, P.; Schlattmann, J. Characterising the friction and wear behaviour of lubricated metal-metal pairings with an optical online particle detection system. Lubr. Sci. 2017. [Google Scholar] [CrossRef]
- Peng, Y.; Wu, T.; Wang, S.; Peng, Z. Wear state identification using dynamic features of wear debris for on-line purpose. Wear 2017, 376–377, 1885–1891. [Google Scholar] [CrossRef]
- Zhu, X.; Zhong, C.; Zhe, J. Lubricating oil conditioning sensors for online machine health monitoring—A review. Tribol. Int. 2017, 109, 473–484. [Google Scholar] [CrossRef]
- Han, L.; Hong, W.; Wang, S. The Key Points of Inductive Wear Debris Sensor. In Proceedings of the 2011 International Conference on Fluid Power and Mechatronics, Beijing, China, 17–20 August 2011. [Google Scholar]
- Carver, L.D. Light blockage by particles as a measurement tool. Ann. N. Y. Acad. Sci. 1969, 158, 710–721. [Google Scholar] [CrossRef]
- ISO 11171:2016(E). Hydraulic Fluid Power—Calibration of Automatic Particle Counters for Liquids; International Organization for Standardization: Geneva, Switzerland, 2016. [Google Scholar]
- ISO 4406:2017. Hydraulic Fluid Power—Fluids—Method for Coding the Level of Contamination by Solid Particles; International Organization for Standardization: Geneva, Switzerland, 2017. [Google Scholar]
- Tic, V.; Lovrec, D.; Edler, J. Operation and accuracy of particle counters for online condition monitoring of hydraulic oils. Ann. Fac. Eng. Hunedoara Int. J. Eng. 2012, 3, 425–428. [Google Scholar]
- Yang, K.; Sun, X.; Zeng, X.; Wu, T. Research on influence of water content to the measurement of wear particle concentration in turbine oil online monitoring simulation. Wear 2017, 376–377, 1222–1226. [Google Scholar] [CrossRef]
- Iwai, Y.; Honda, T.; Miyajima, T.; Yoshinaga, S.; Higashi, M.; Fuwa, Y. Quantitative estimation of wear amounts by real time measurement of wear debris in lubricating oil. Tribol. Int. 2010, 43, 388–394. [Google Scholar] [CrossRef]
- Ding, Y.; Wang, Y. A design of oil debris monitoring and sensing system. In Proceedings of the 2015 IEEE Workshop on Signal Processing Systems (SiPS), Hangzhou, China, 14–16 October 2015. [Google Scholar]
- Zhan, H.; Song, Y.; Zhao, H.; Gu, J.; Yang, H.; Li, S. Study of the Sensor for On-line Lubricating Oil Debris Monitoring. Sens. Transducers 2014, 175, 214–219. [Google Scholar]
- Kim, H.; Rajwa, B.; Bhunia, A.K.; Robinson, J.P.; Bae, E. Development of a multispectral light-scatter sensor for bacterial colonies. J. Biophotonics 2017, 10, 634–644. [Google Scholar] [CrossRef] [PubMed]
- Zhan, Y.; Zhang, J.; Zeng, J.; Li, B.; Chen, L. The design of a small flow optical sensor of particle counter. Opt. Commun. 2018, 407, 296–300. [Google Scholar] [CrossRef]
- Bohren, C.F.; Hoffmann, D.R. Absorption and Scattering of Light by Small Particles; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1998; pp. 99–101. [Google Scholar]
- Khodier, S.A. Refractive index of standard oils as a function of wavelength and temperature. Opt. Laser Technol. 2002, 34, 125–128. [Google Scholar] [CrossRef]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krogsøe, K.; Henneberg, M.; Eriksen, R.L. Model of a Light Extinction Sensor for Assessing Wear Particle Distribution in a Lubricated Oil System. Sensors 2018, 18, 4091. https://doi.org/10.3390/s18124091
Krogsøe K, Henneberg M, Eriksen RL. Model of a Light Extinction Sensor for Assessing Wear Particle Distribution in a Lubricated Oil System. Sensors. 2018; 18(12):4091. https://doi.org/10.3390/s18124091
Chicago/Turabian StyleKrogsøe, Kevin, Morten Henneberg, and René Lynge Eriksen. 2018. "Model of a Light Extinction Sensor for Assessing Wear Particle Distribution in a Lubricated Oil System" Sensors 18, no. 12: 4091. https://doi.org/10.3390/s18124091
APA StyleKrogsøe, K., Henneberg, M., & Eriksen, R. L. (2018). Model of a Light Extinction Sensor for Assessing Wear Particle Distribution in a Lubricated Oil System. Sensors, 18(12), 4091. https://doi.org/10.3390/s18124091