Fast Phase-Only Positioning with Triple-Frequency GPS



Abstract
:1. Introduction
2. Processing Strategy
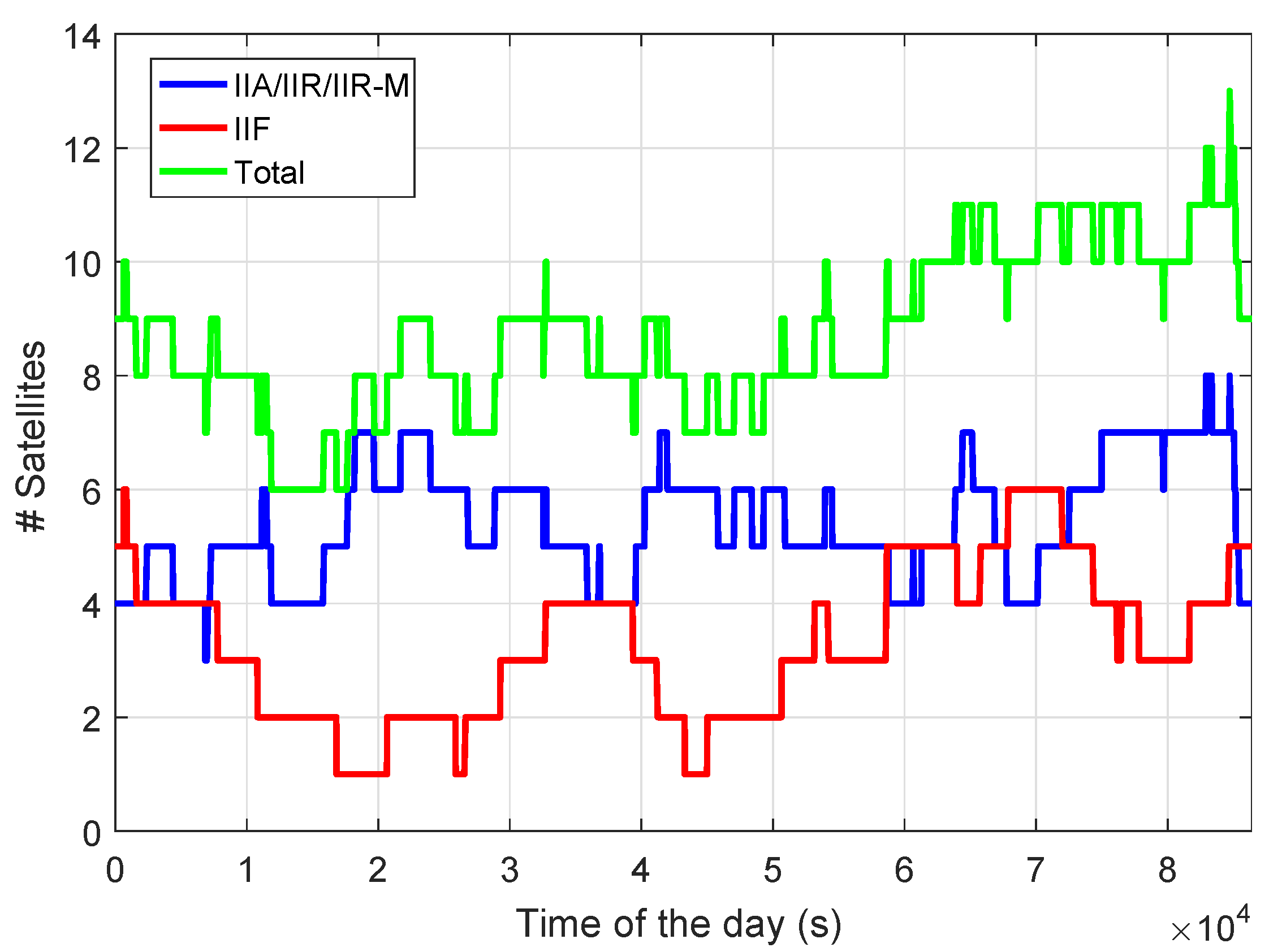
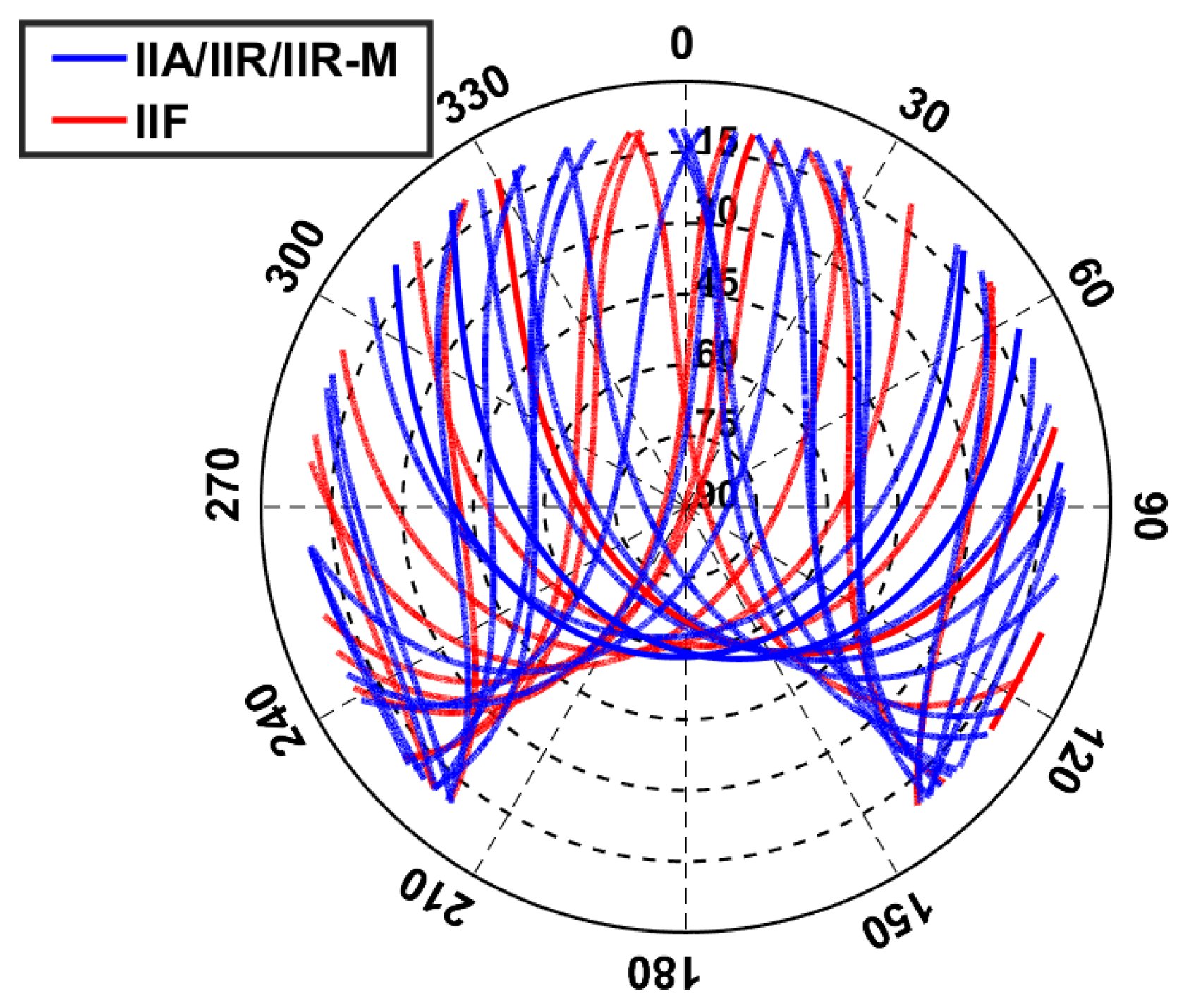
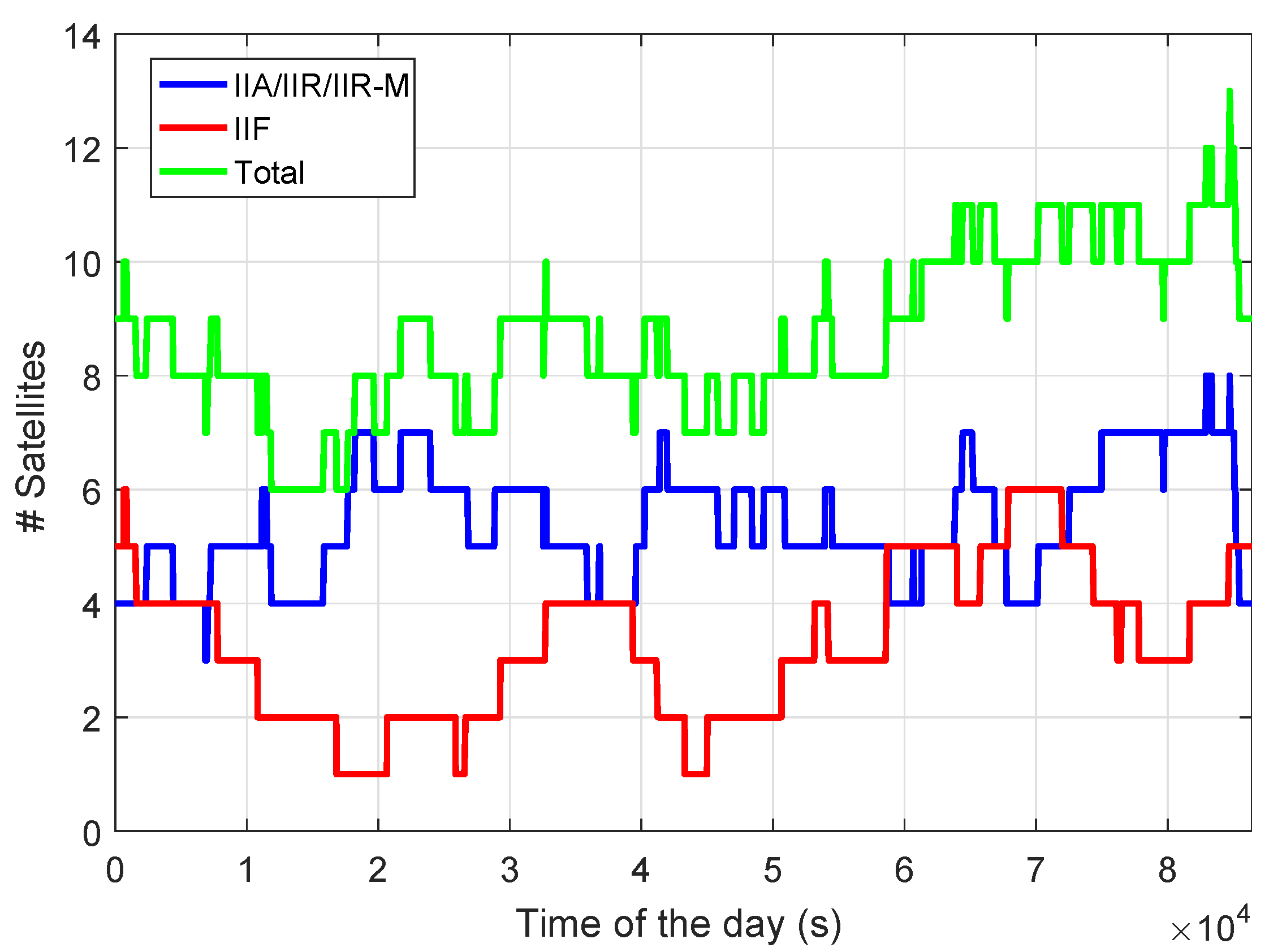
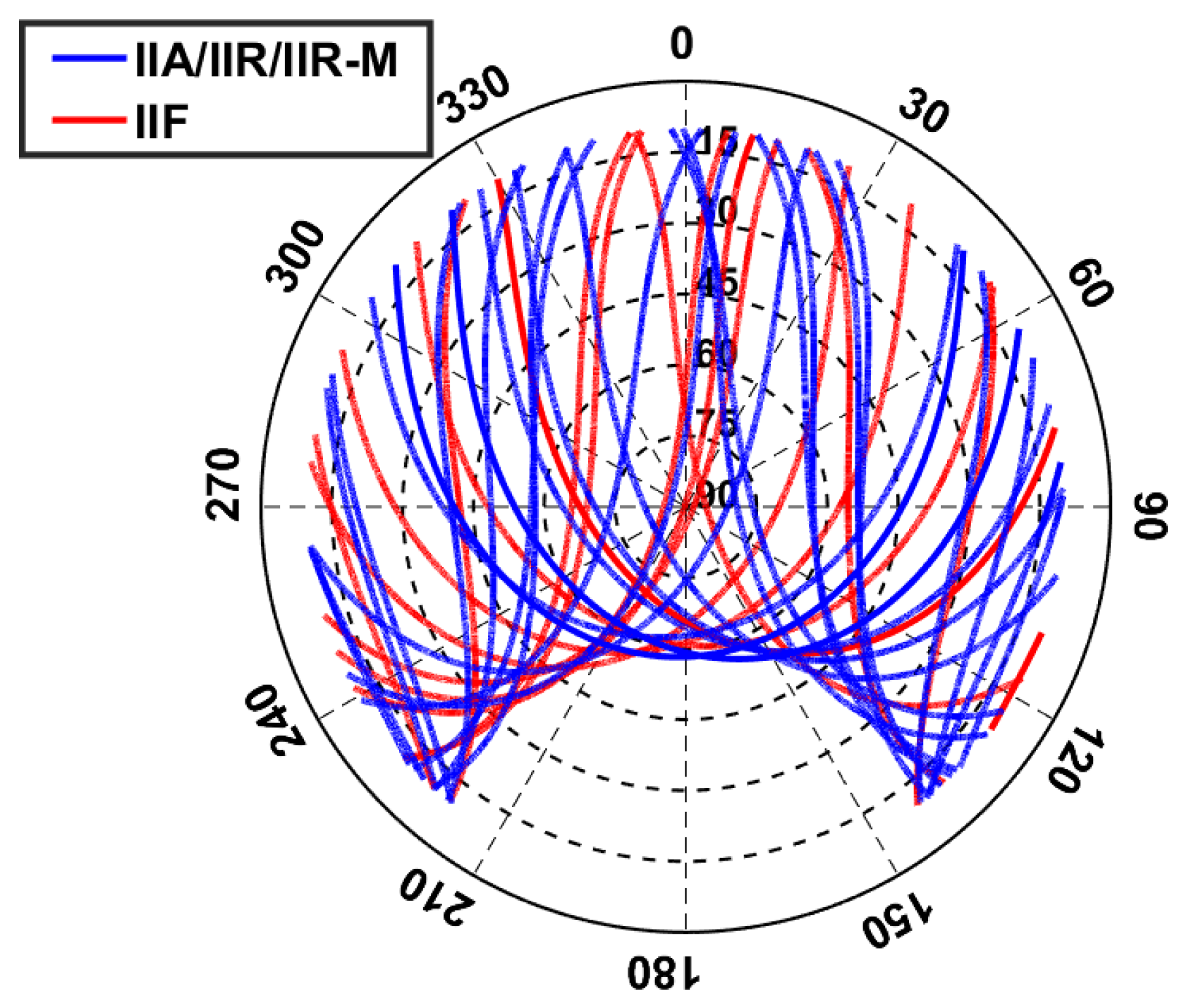
3. Measurement Geometry
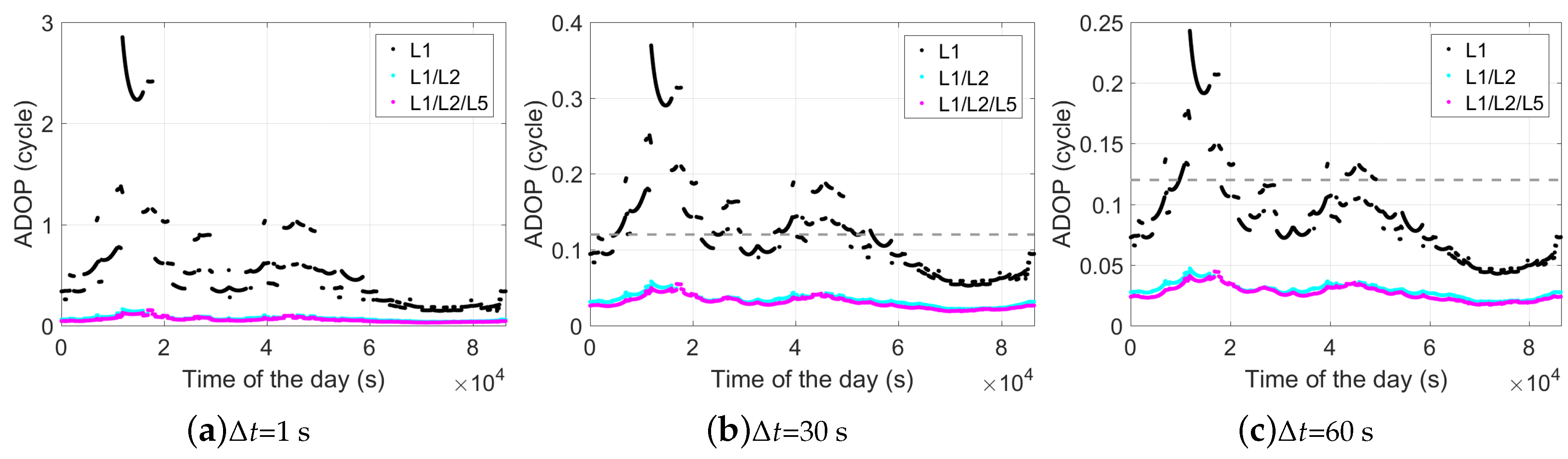
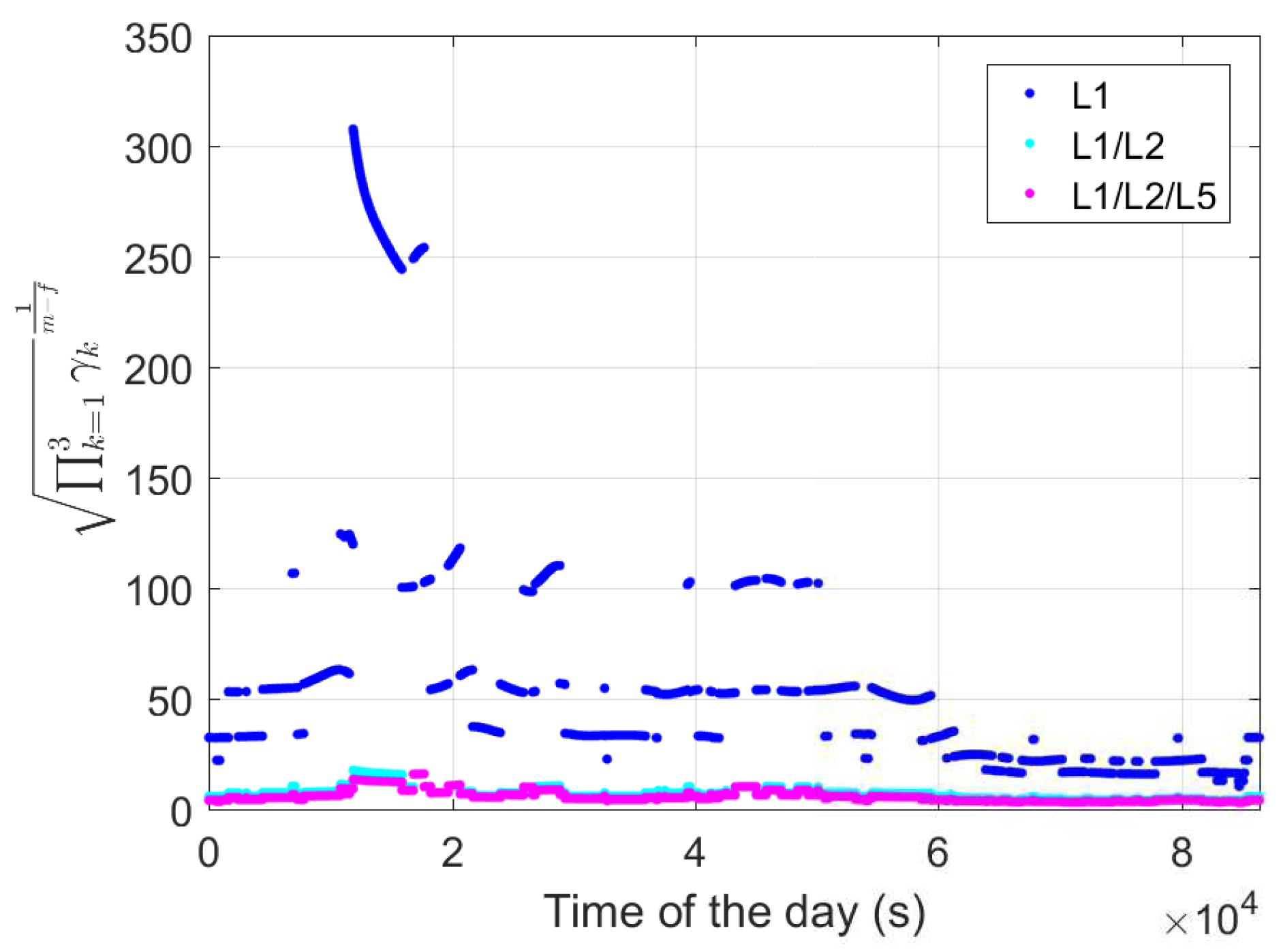
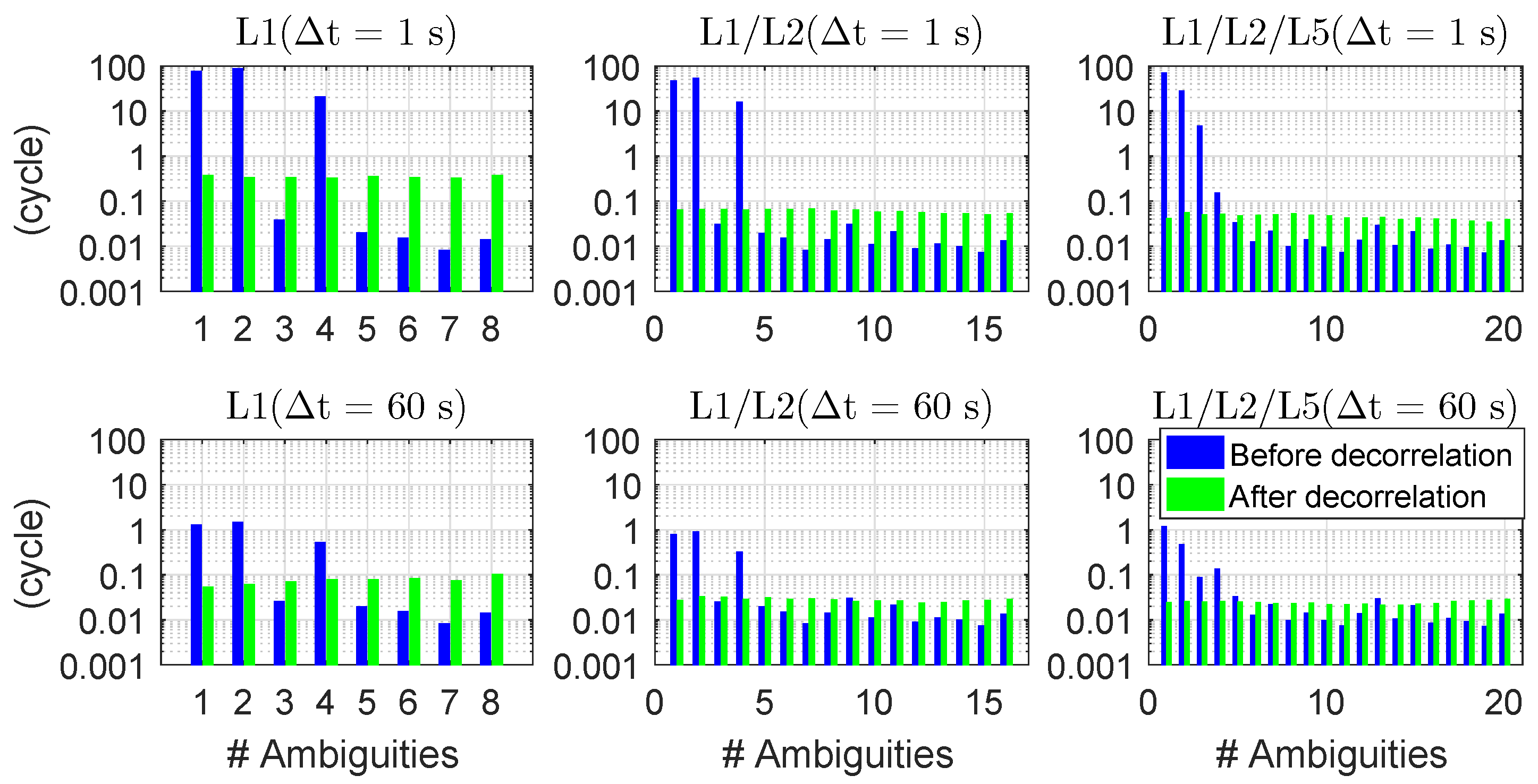
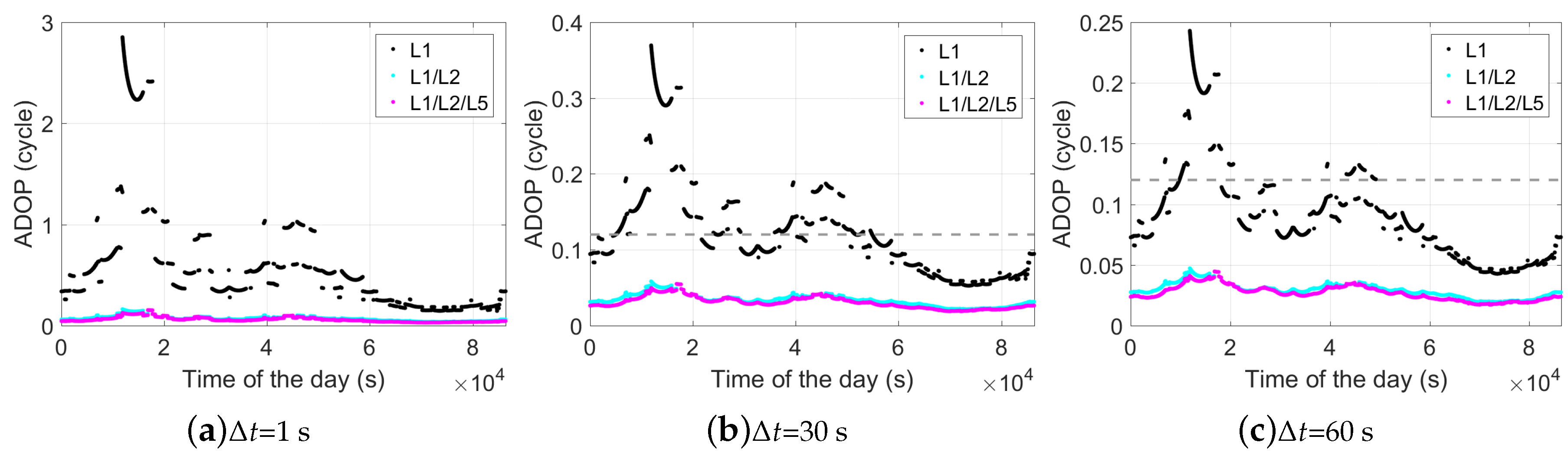
4. Ambiguity Resolution
5. Positioning Performance
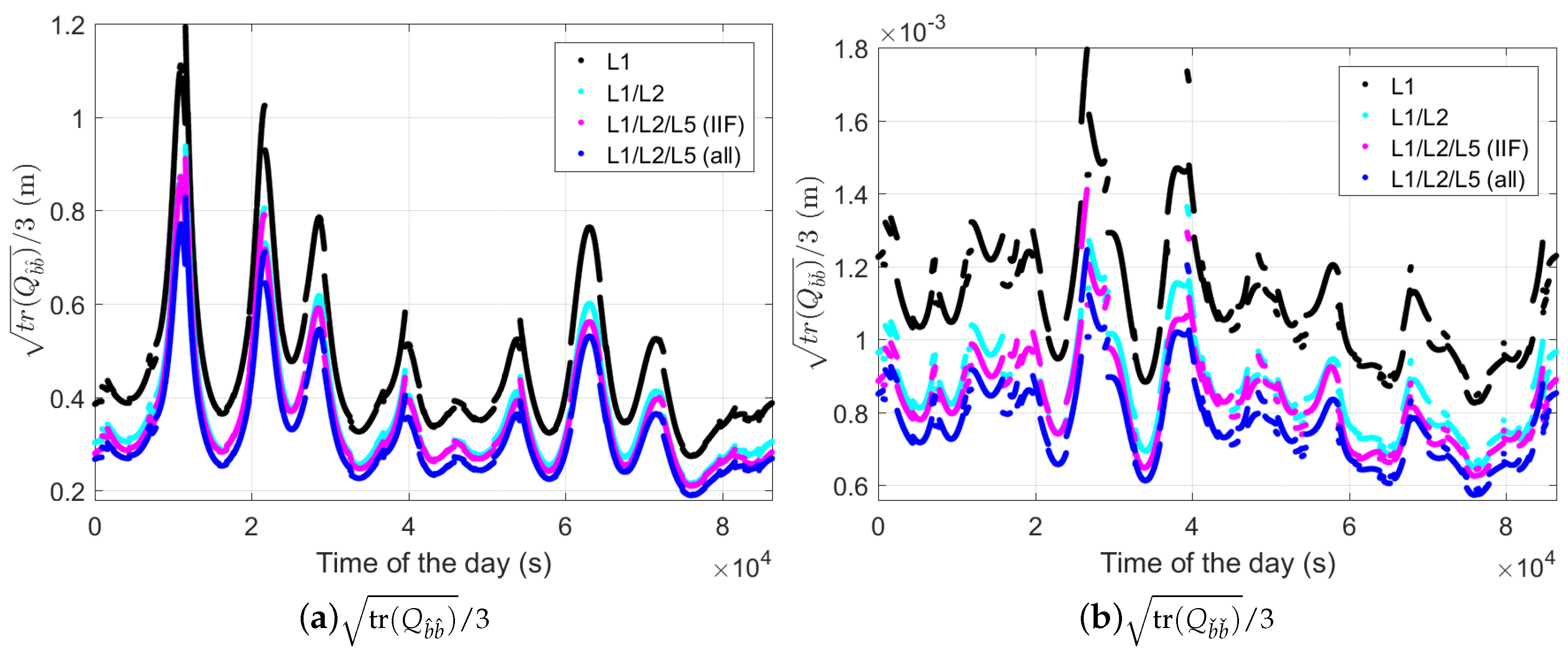
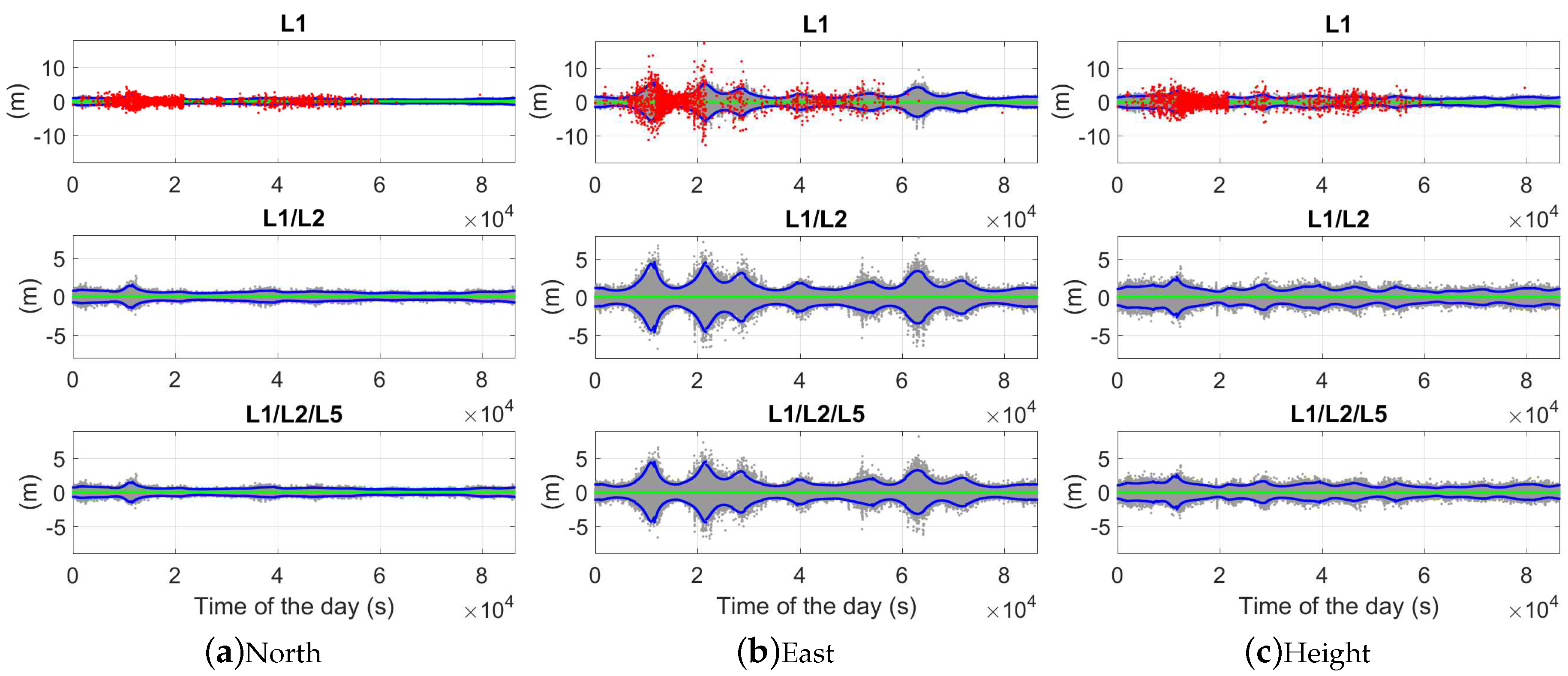
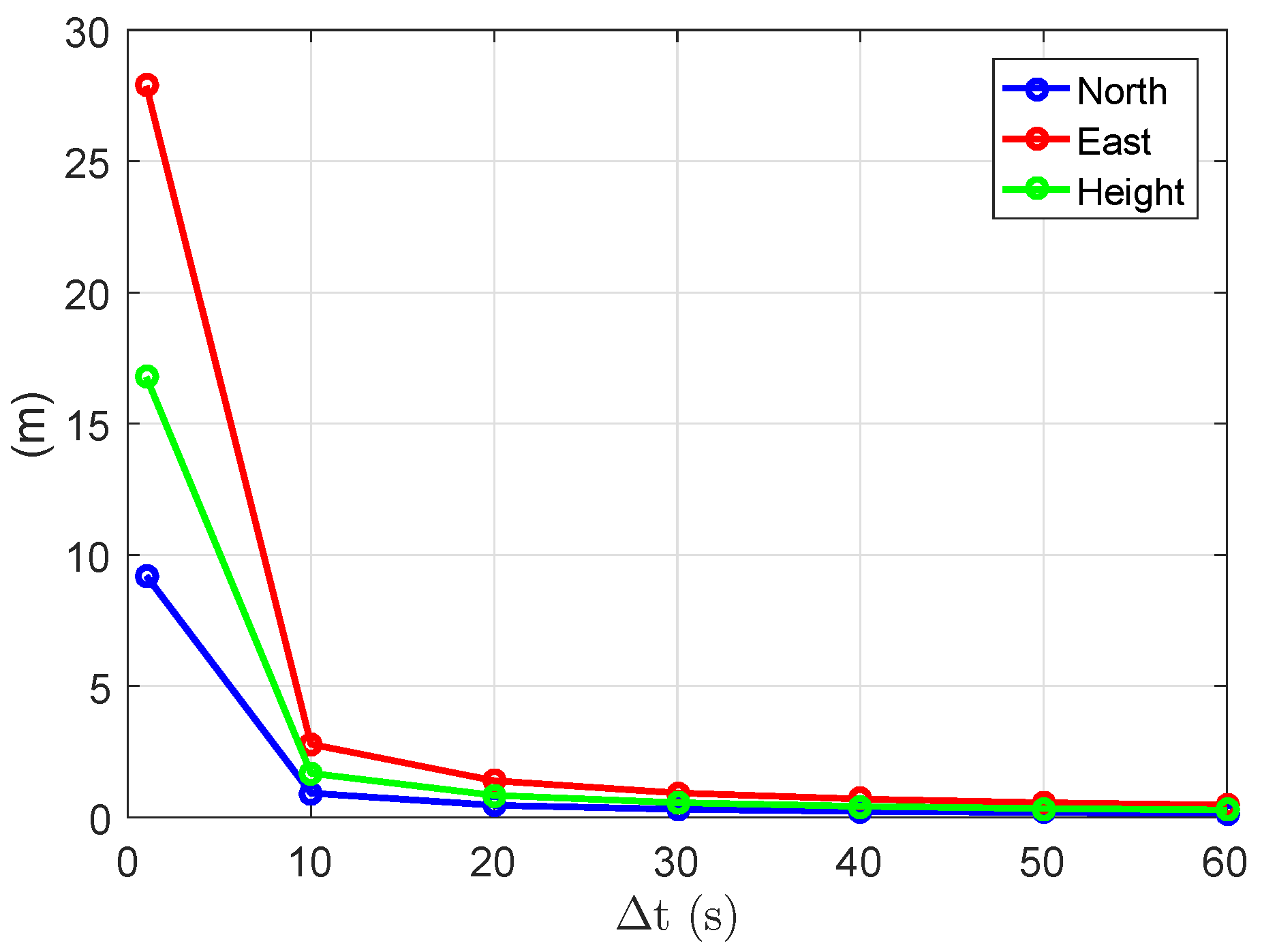
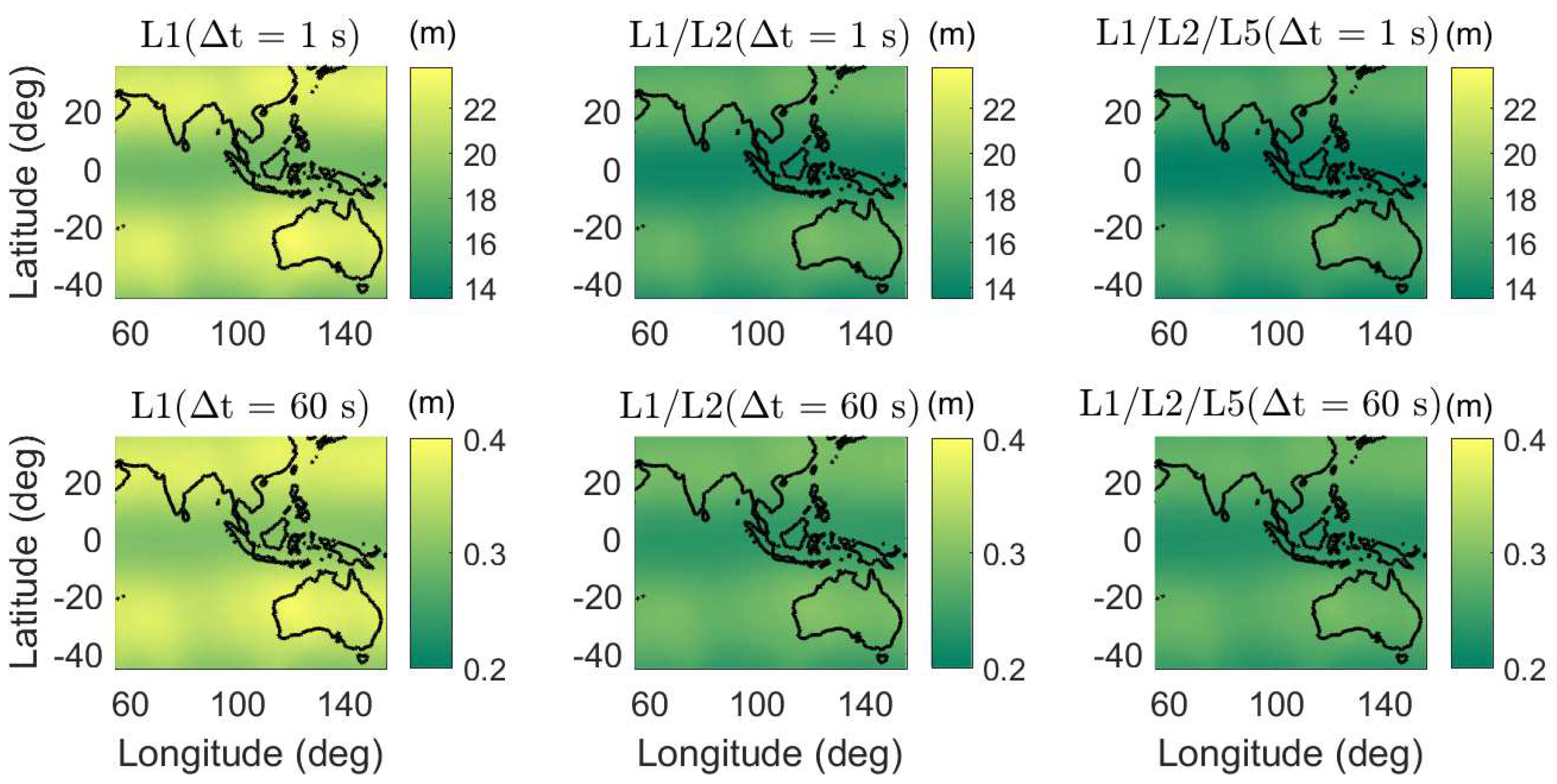
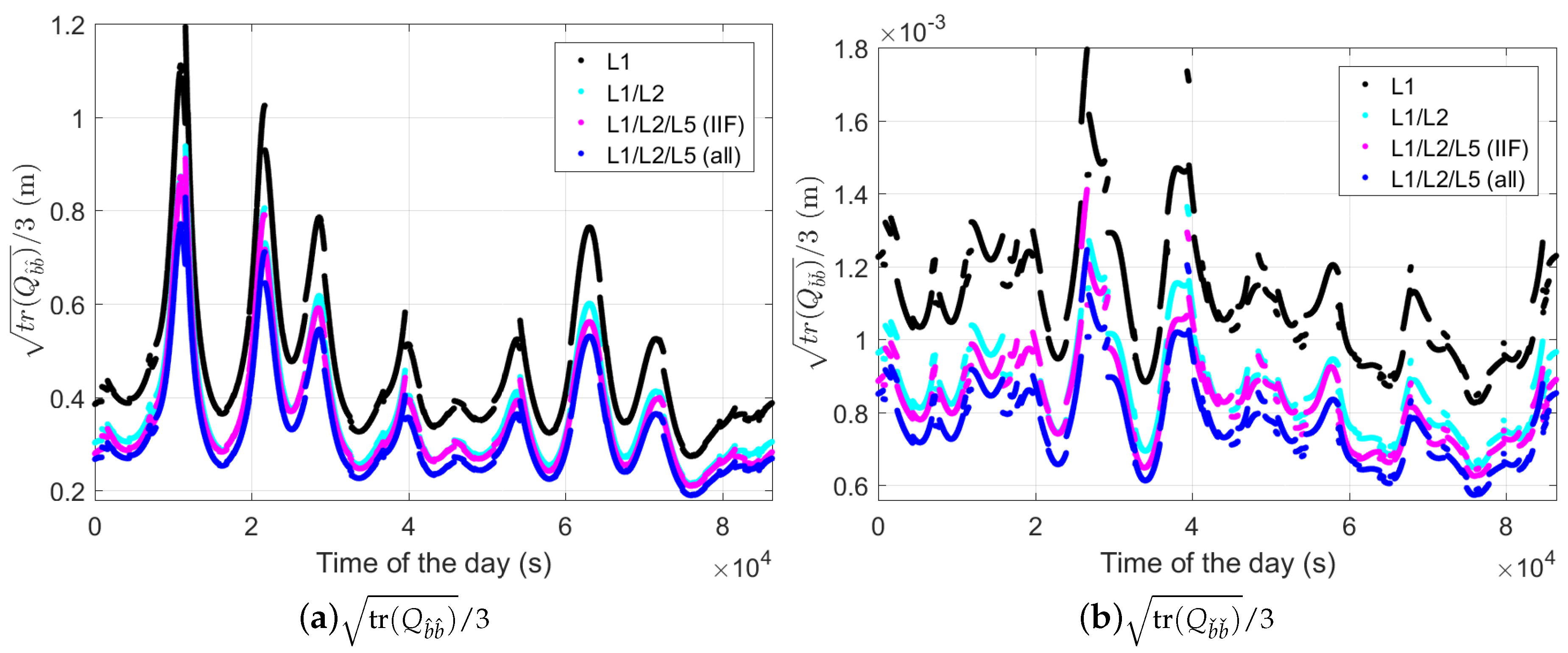
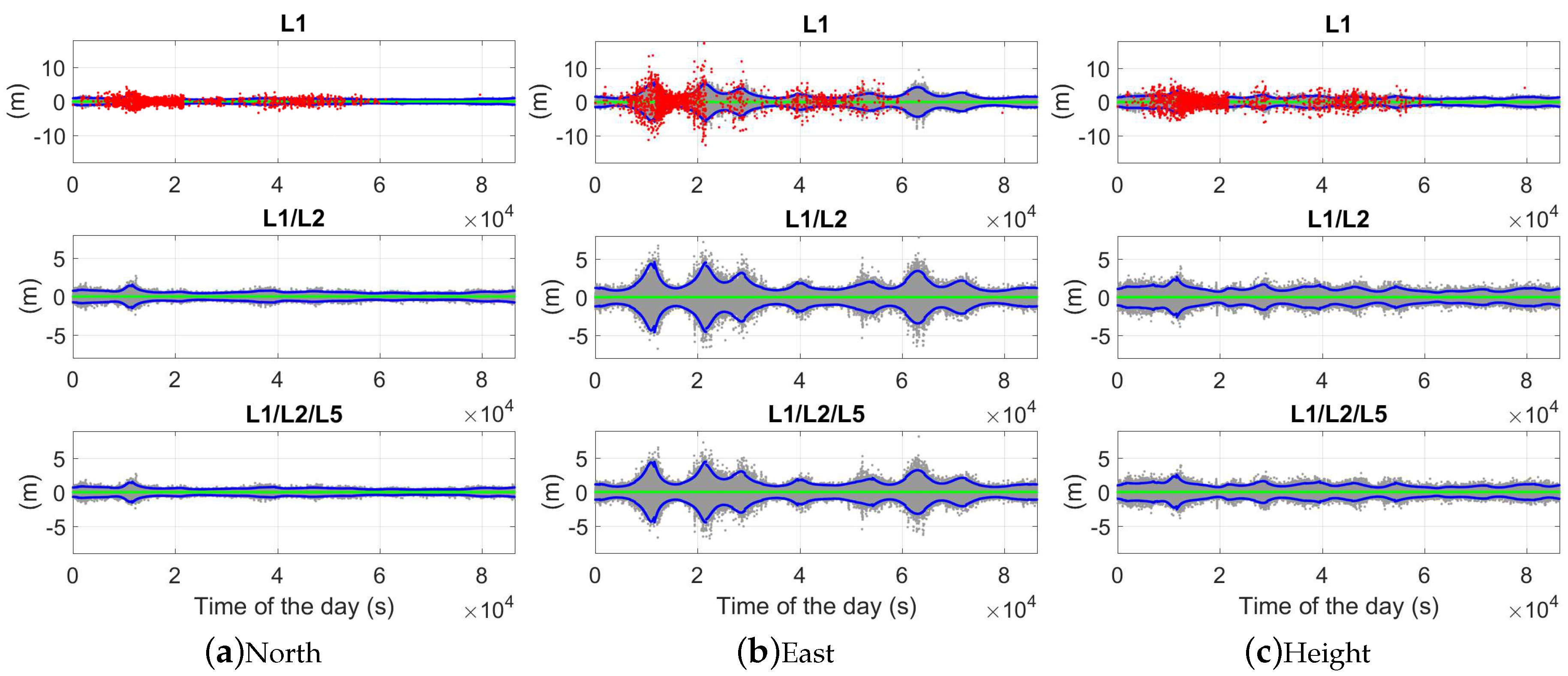
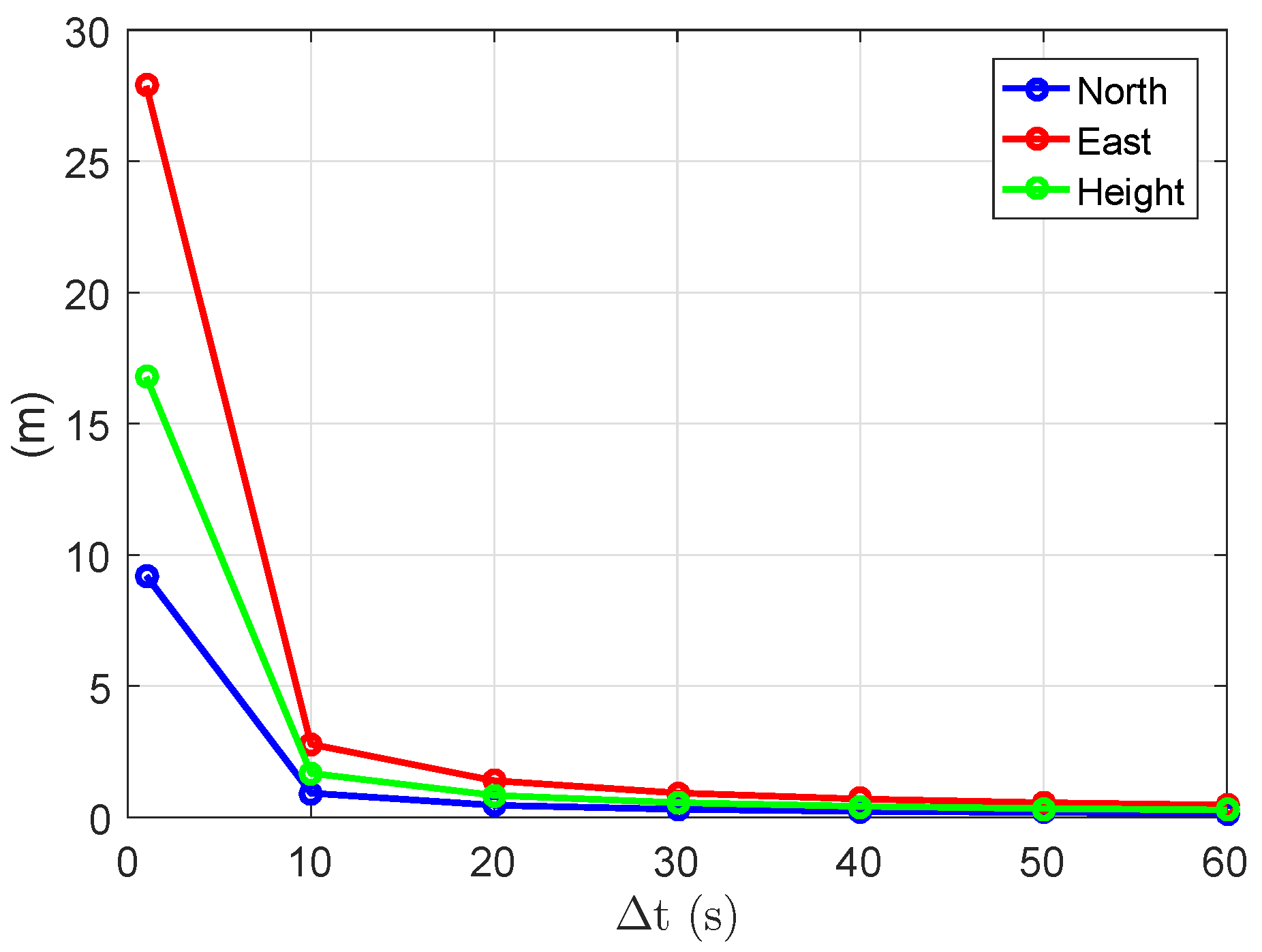
5.1. Ambiguity-Float Solutions
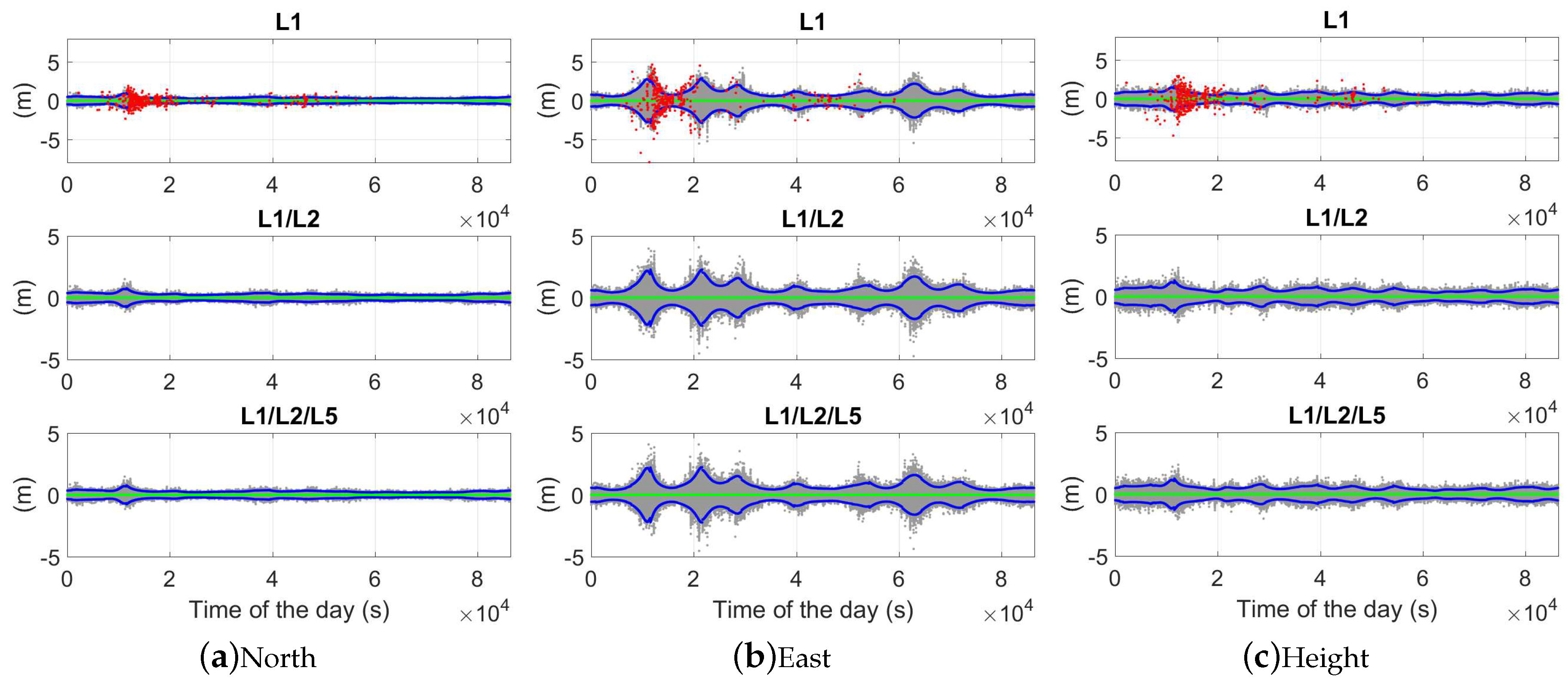
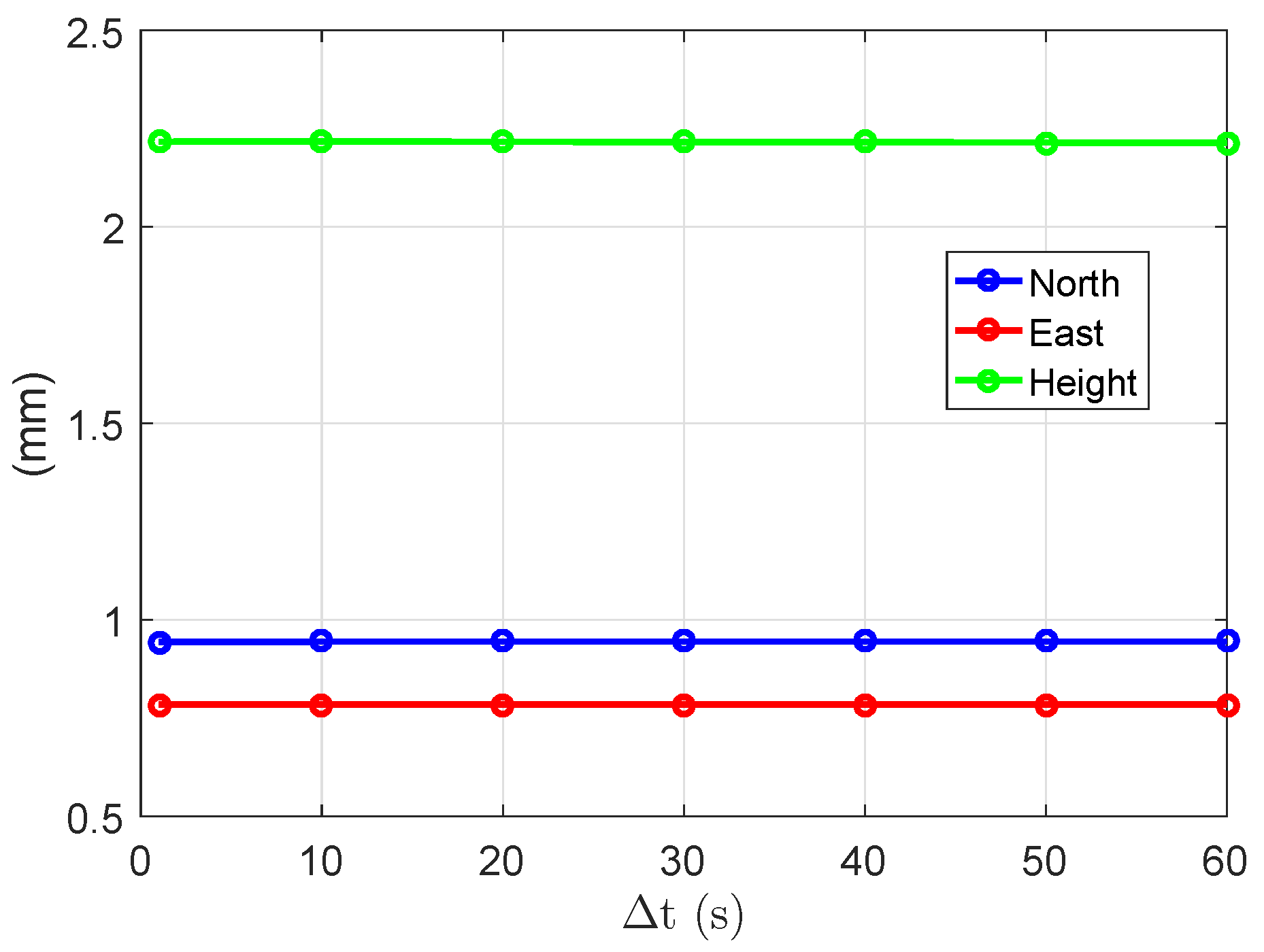
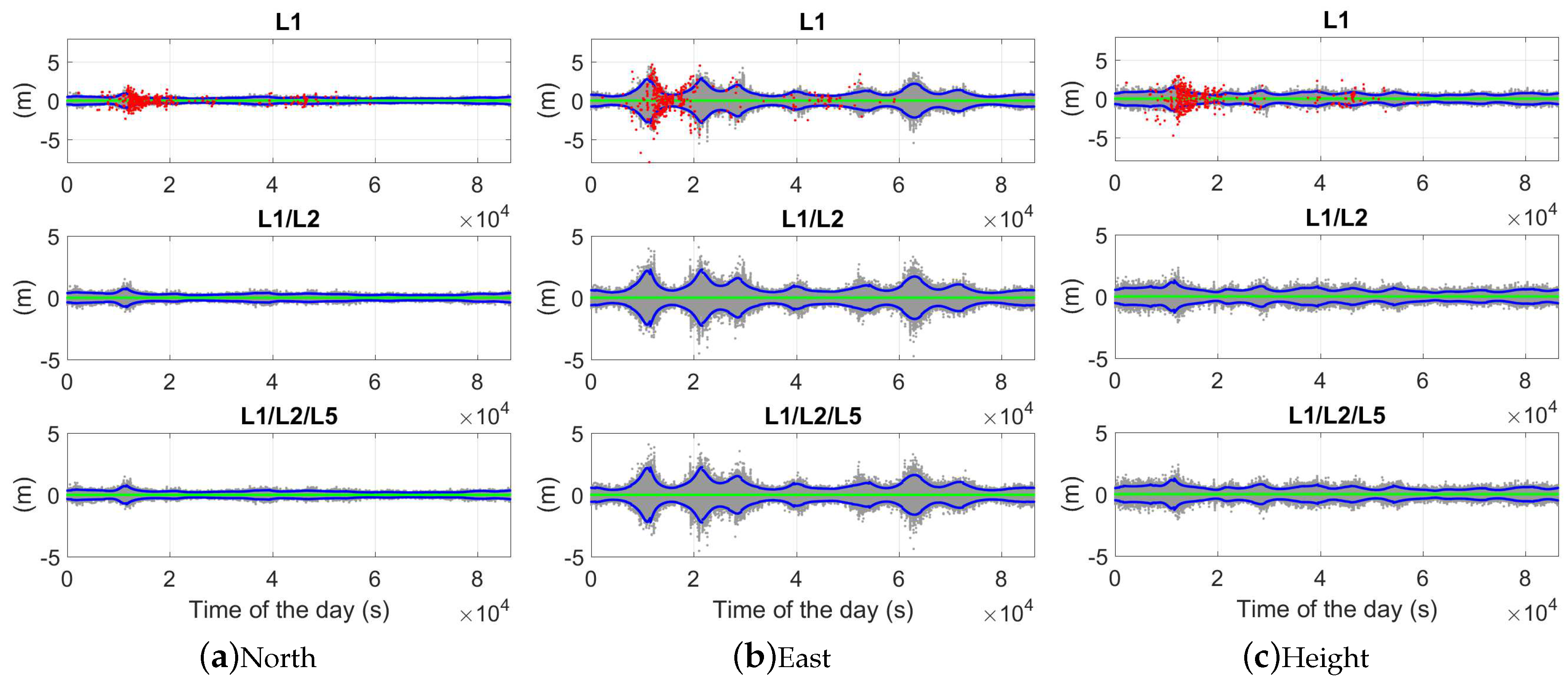
5.2. Ambiguity-Fixed Solutions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Codol, J.M.; Monin, A. Improved triple difference GPS carrier phase for RTK-GPS positioning. In Proceedings of the 2011 IEEE Statistical Signal Processing Workshop (SSP), Nice, France, 28–30 June 2011. [Google Scholar] [CrossRef]
- Remondi, B.W.; Brown, G. Triple Differencing with Kalman Filtering: Making It Work. GPS Solut. 2000, 3, 58–64. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; de Jonge, P.J.; Tiberius, C.C.J.M. The least-squares ambiguity decorrelation adjustment: Its performance on short GPS baselines and short observation spans. J. Geodesy 1997, 71, 589–602. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation. J. Geodesy 1995, 70, 65–82. [Google Scholar] [CrossRef]
- GPS Constellation Status for 09/05/2018, Navigation Center. Available online: https://www.navcen.uscg.gov/?Do=constellationStatus (accessed on 5 September 2018).
- MGEX combined broadcast ephemeris in 2018. Available online: ftp://ftp.cddis.eosdis.nasa.gov/gnss/data/campaign/mgex/daily/rinex3/2018/brdm (accessed on 28 August 2018).
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.B.; Mervart, L.; Hugentobler, U. IGS-MGEX: Preparing the Ground for Multi-Constellation GNSS Science. Inside GNSS 2014, 9, 42–49. [Google Scholar]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Euler, H.J.; Goad, C.C. On optimal filtering of GPS dual frequency observations without using orbit information. Bull. Geod. 1991, 65, 130–143. [Google Scholar] [CrossRef]
- Amiri-Simkooei, A.R.; Teunissen, P.J.G.; Tiberius, C.C.J.M. Application of least-squares variance component estimation to GPS observables. J. Surv. Eng. 2009, 135, 149–160. [Google Scholar] [CrossRef]
- Wang, K.; Chen, P.; Zaminpardaz, S.; Teunissen, P.J.G. Precise Regional L5 Positioning with IRNSS and QZSS: stand alone and combined. GPS Solut. 2018, 23, 10. [Google Scholar] [CrossRef]
- Zaminpardaz, S.; Wang, K.; Teunissen, P.J.G. Australia-first high-precision positioning results with new Japanese QZSS regional satellite system. GPS Solut. 2018, 22, 101. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems, 1st ed.; Springer: Cham, Switzerland, 2017; ISBN 978-3-319-42926-7. [Google Scholar]
- Teunissen, P.J.G. A canonical theory for short GPS baselines. Part I: The baseline precision. J. Geodesy 1997, 71, 320–336. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. A canonical theory for short GPS baselines. Part IV: Precision versus reliability. J. Geodesy 1997, 71, 513–525. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.G. ADOP in closed form for a hierarchy of multi-frequency single-baseline GNSS models. J. Geodesy 2008, 82, 473–492. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G. An optimality property of the integer least-squares estimator. J. Geodesy 1999, 73, 587–593. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Success probability of integer GPS ambiguity rounding and bootstrapping. J. Geodesy 1998, 72, 606–612. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | CUAA-CUBB (mm) | CUAA-CUCC (mm) |
|---|---|---|
| L1 | 1 | 1 |
| L2 | 1 | 2 |
| L5 | 2 | 2 |
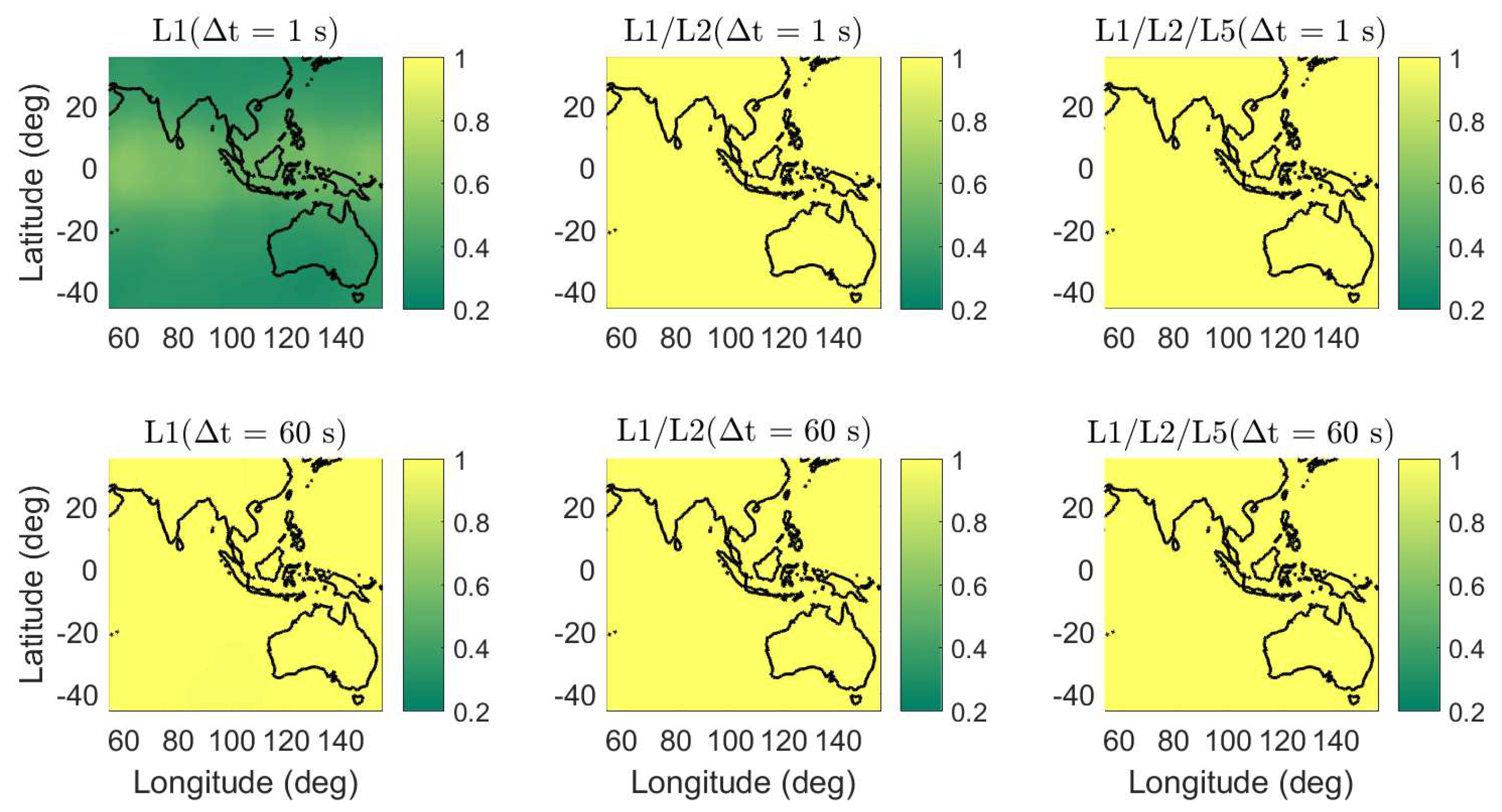
| Frequency | CUAA-CUBB | CUAA-CUCC | ||||
|---|---|---|---|---|---|---|
| 1 s | 10 s | 60 s | 1 s | 10 s | 60 s | |
| L1 | 0.186(0.317) | 0.695(0.823) | 0.966(0.989) | 0.185(0.303) | 0.677(0.808) | 0.961(0.987) |
| L1/L2 | 0.988(0.999) | 1.000(1.000) | 1.000(1.000) | 0.974(0.998) | 1.000(1.000) | 1.000(1.000) |
| L1/L2/L5 | 0.996(1.000) | 1.000(1.000) | 1.000(1.000) | 0.988(0.999) | 1.000(1.000) | 1.000(1.000) |
| Frequency | CUAA-CUBB (m) | CUAA-CUCC (m) | ||
|---|---|---|---|---|
| 1 s | 60 s | 1 s | 60 s | |
| L1 | 7(12)/23(37)/14(22) | 0.2(0.2)/0.6(0.6)/0.4(0.4) | 7(13)/23(38)/14(23) | 0.2(0.2)/0.6(0.6)/0.4(0.4) |
| L1/L2 | 8(10)/24(29)/15(17) | 0.2(0.2)/0.5(0.5)/0.3(0.3) | 7(11)/24(32)/15(19) | 0.2(0.2)/0.5(0.5)/0.3(0.3) |
| L1/L2/L5 | 8(9)/25(28)/15(17) | 0.2(0.2)/0.5(0.5)/0.3(0.3) | 7(10)/24(31)/15(18) | 0.2(0.2)/0.5(0.5)/0.3(0.3) |
| Frequency | CUAA-CUBB (mm) | CUAA-CUCC (mm) | ||
|---|---|---|---|---|
| 1 s | 60 s | 1 s | 60 s | |
| L1 | – | 2(1)/2(1)/4(3) | – | 2(1)/2(1)/4(3) |
| L1/L2 | 2(1)/2(1)/4(2) | 2(1)/1(1)/4(2) | 2(1)/2(1)/4(3) | 2(1)/2(1)/4(3) |
| L1/L2/L5 | 2(1)/2(1)/4(2) | 2(1)/1(1)/4(2) | 2(1)/2(1)/4(2) | 2(1)/1(1)/3(2) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Chen, P.; Teunissen, P.J.G. Fast Phase-Only Positioning with Triple-Frequency GPS. Sensors 2018, 18, 3922. https://doi.org/10.3390/s18113922
Wang K, Chen P, Teunissen PJG. Fast Phase-Only Positioning with Triple-Frequency GPS. Sensors. 2018; 18(11):3922. https://doi.org/10.3390/s18113922
Chicago/Turabian StyleWang, Kan, Pei Chen, and Peter J. G. Teunissen. 2018. "Fast Phase-Only Positioning with Triple-Frequency GPS" Sensors 18, no. 11: 3922. https://doi.org/10.3390/s18113922
APA StyleWang, K., Chen, P., & Teunissen, P. J. G. (2018). Fast Phase-Only Positioning with Triple-Frequency GPS. Sensors, 18(11), 3922. https://doi.org/10.3390/s18113922