An Enhanced Map-Matching Algorithm for Real-Time Position Accuracy Improvement with a Low-Cost GPS Receiver


Abstract
1. Introduction
2. Preliminaries
2.1. Specifications
- The performance of a low-cost GPS receiver is enhanced based on a GPS and the digital map information without using any additional sensors.
- The proposed method is simple. The necessary information includes the x-y coordinates, and heading. By ignoring the map data with no relation to the trajectory of a vehicle, computational efficiency can be enhanced. Thus, it is not limited by the computing power of a processor.
- The performance of the proposed method is verified through real-time experiments on a low-cost MCU-based embedded board.
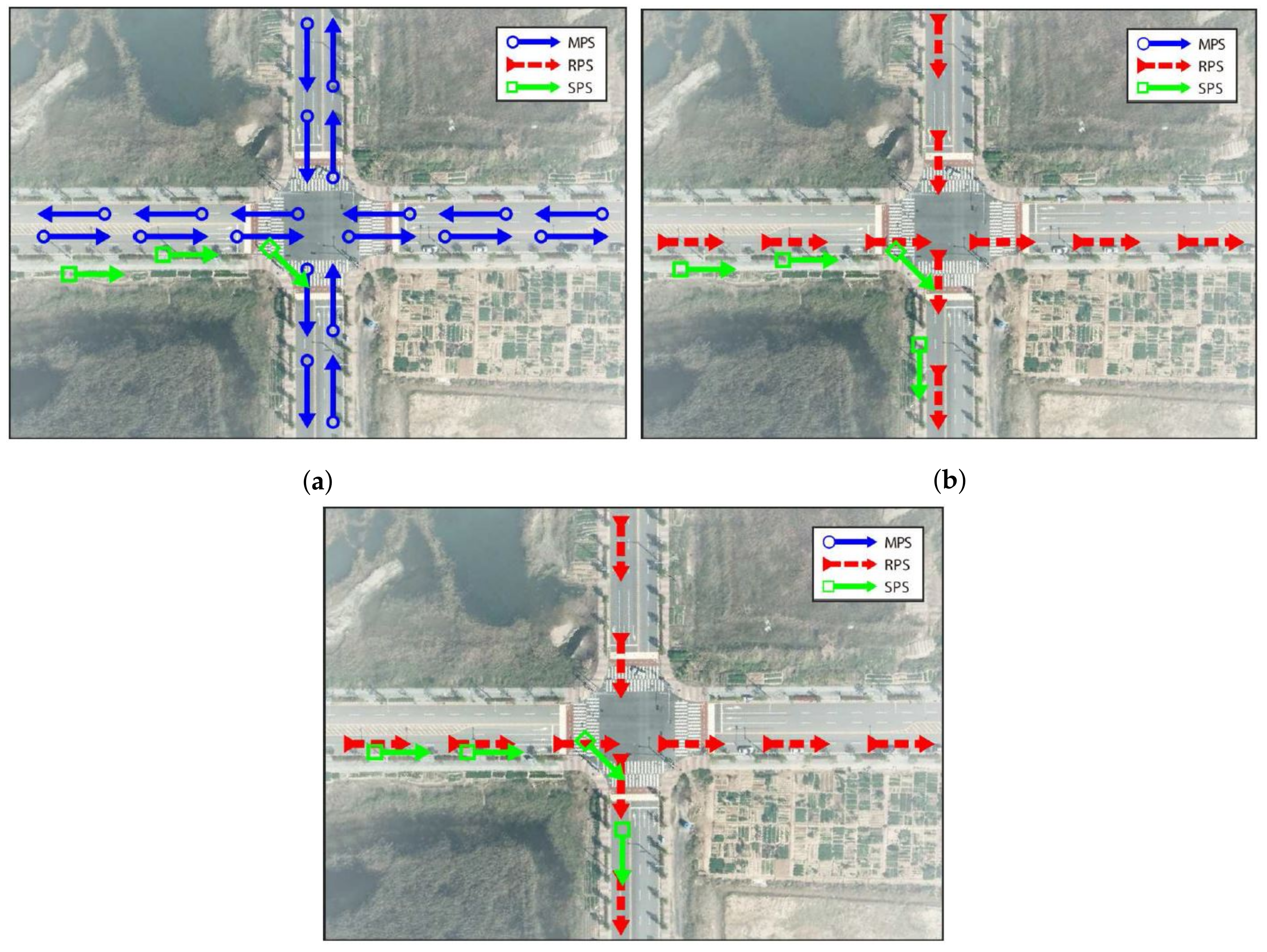
2.2. Description of the Vector Point Sets
- Assuming that a vehicle is traveling along the center of road, the map point set (MPS) is built prior to execution and composed of the vector points extracted from the center of roads.
- The source point set (SPS) is updated from a GPS receiver at each sampling time and contains the vector points of the vehicle trajectory.
- The reference point set (RPS) is created from the selected vector points in the MPS that a vehicle is expected to pass.
2.3. ICP-Based Map-Matching Method
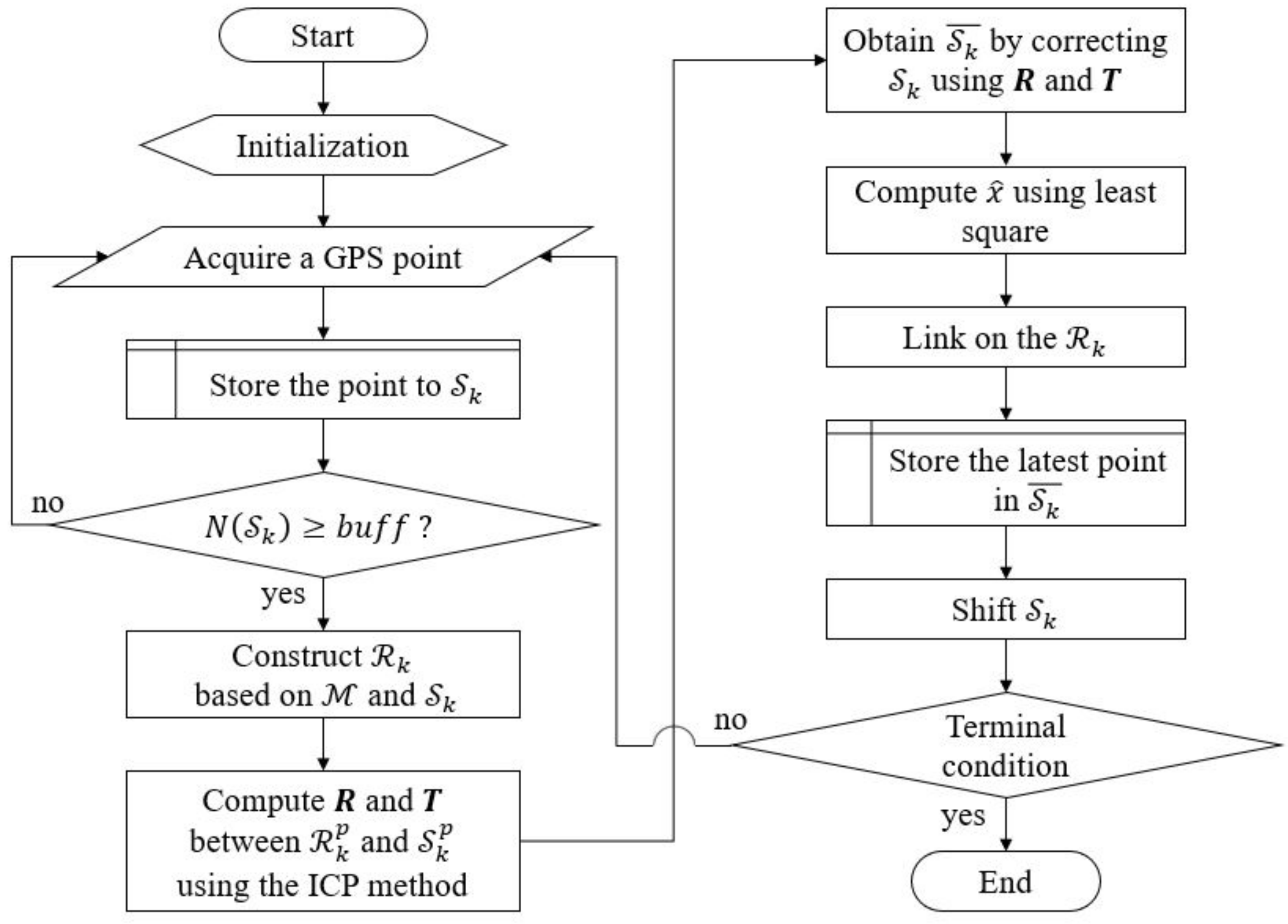
3. Enhanced Map-Matching Algorithm for Real-Time Position Accuracy Improvement
- step 1.
- Loading of the digital databases,
- step 2.
- Calculation of the disparity information,
- step 3.
- Calibration of the rotational error using the least squares method,
- step 4.
- Location of the vehicle position on the map.
3.1. Step 1: Loading of the Digital Databases
| Algorithm 1 Algorithm for constructing the RPS | |
| function Construction () | |
| Initialize: ← empty set | |
| for i ← 1 to buff do | |
| if is North then | |
| = ∪ | |
| = − | |
| else if is South then | |
| = ∪ | |
| = − | |
| end if | |
| if is East then | |
| = ∪ | |
| = − | |
| else if is West then | |
| = ∪ | |
| = − | |
| end if | |
| end for | |
| Return | |
| end function |
3.2. Step 2: Calculation of the Disparity Information
3.3. Step 3: Calibration of Rotational Error Using the Least Squares Method
3.4. Step 4: Location of the Vehicle Position on the Map
4. Experimental Setup and Results
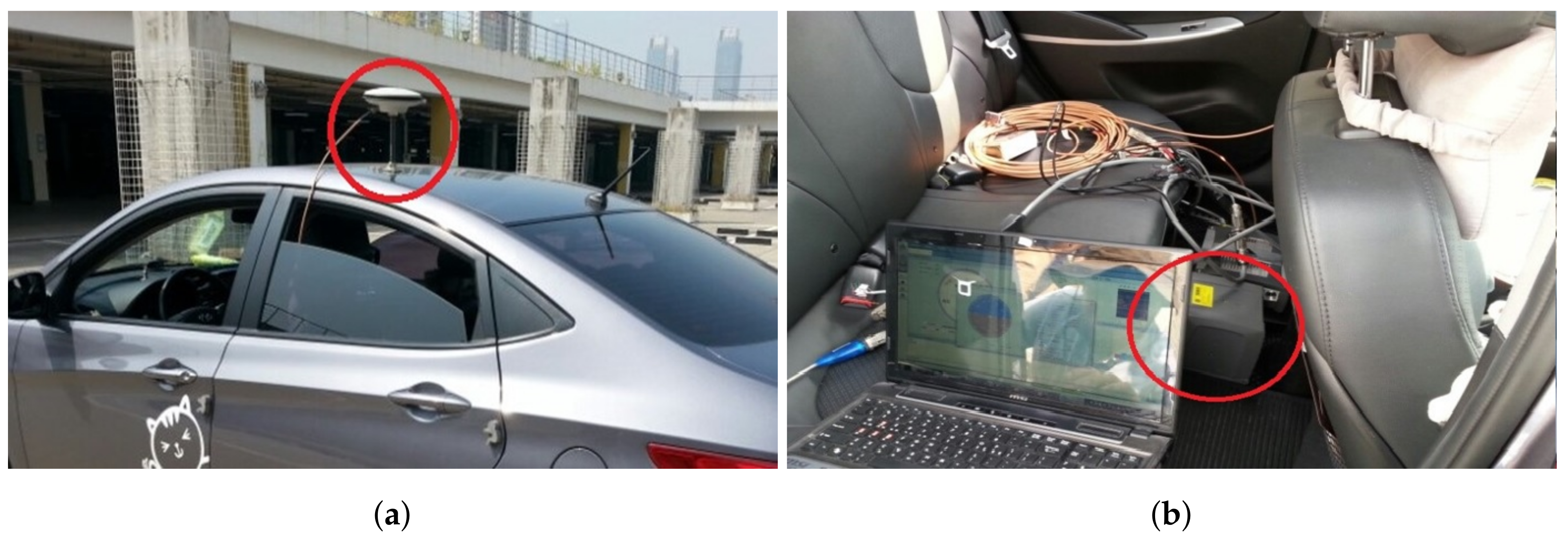
4.1. Hardware Implementation
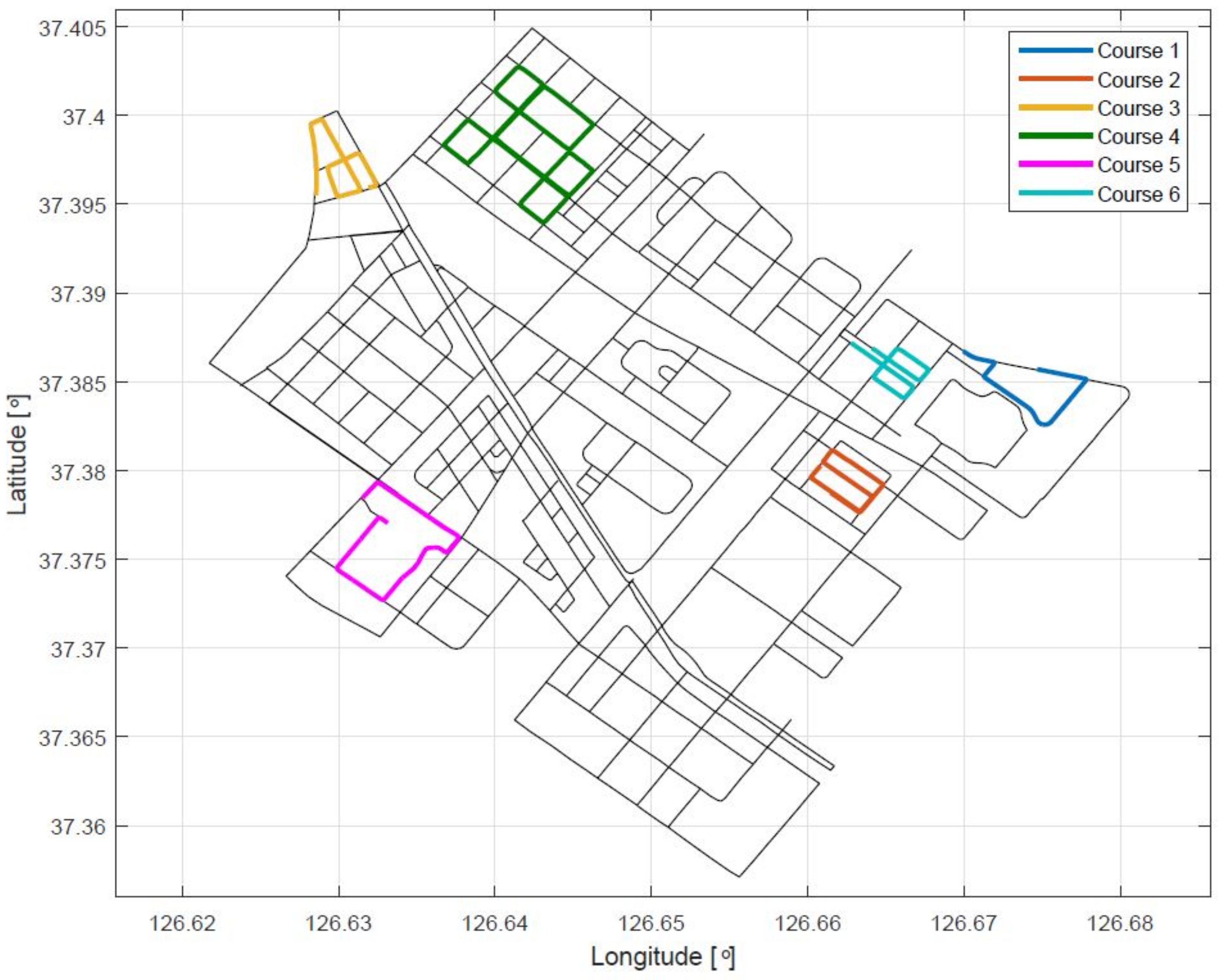
4.2. Experimental Setup
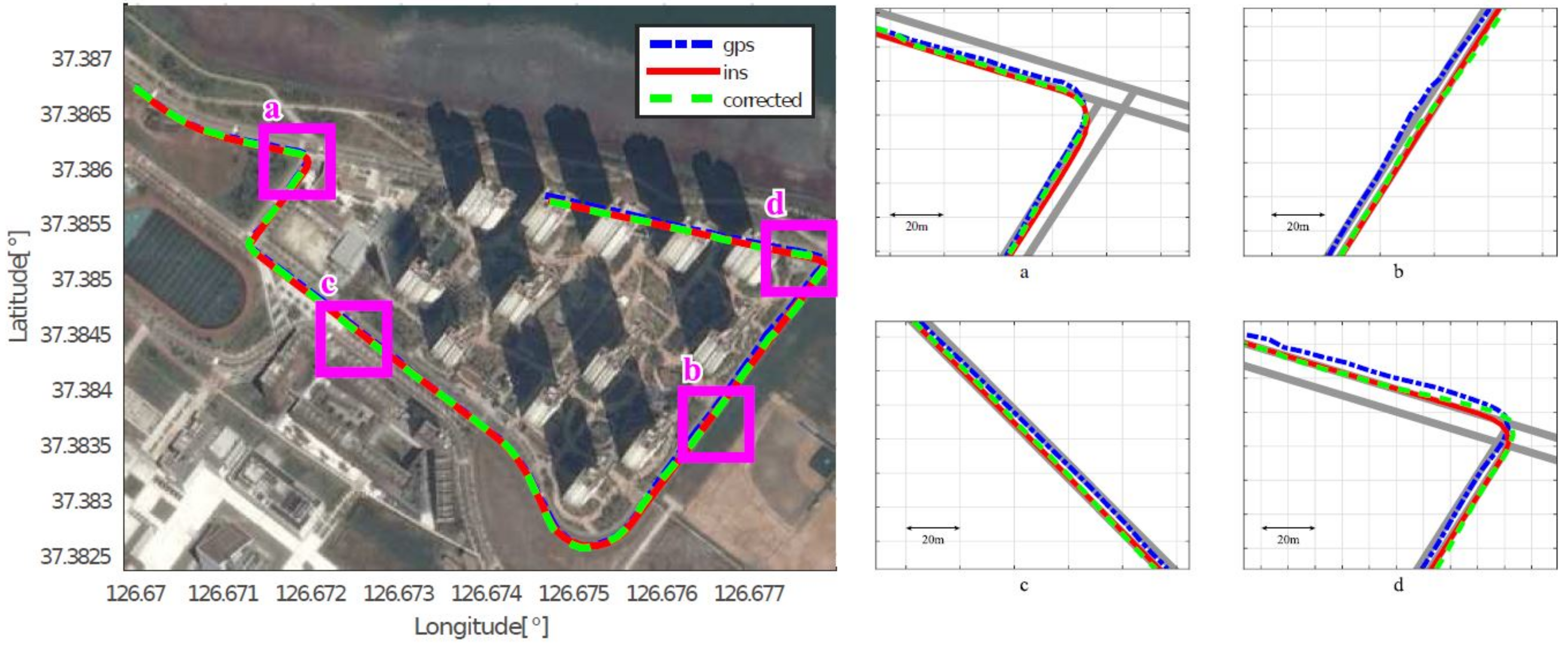
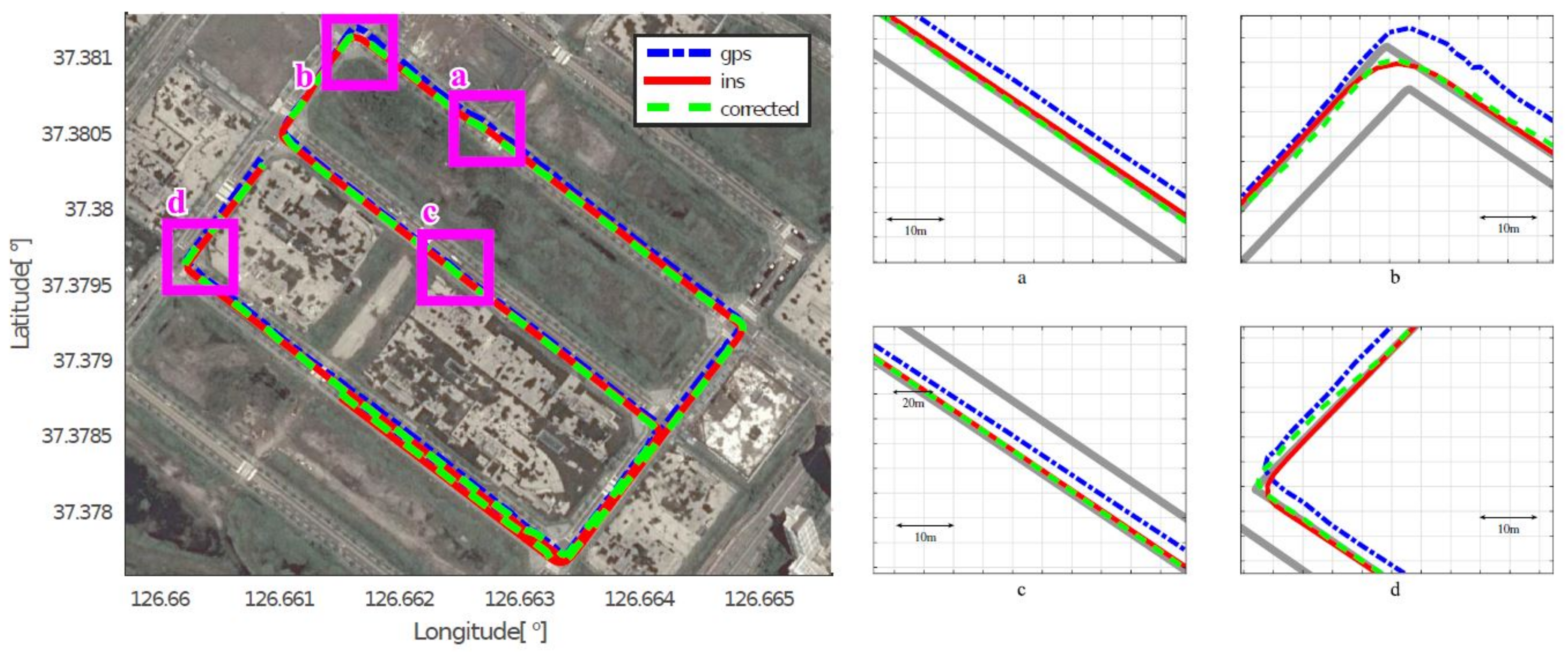
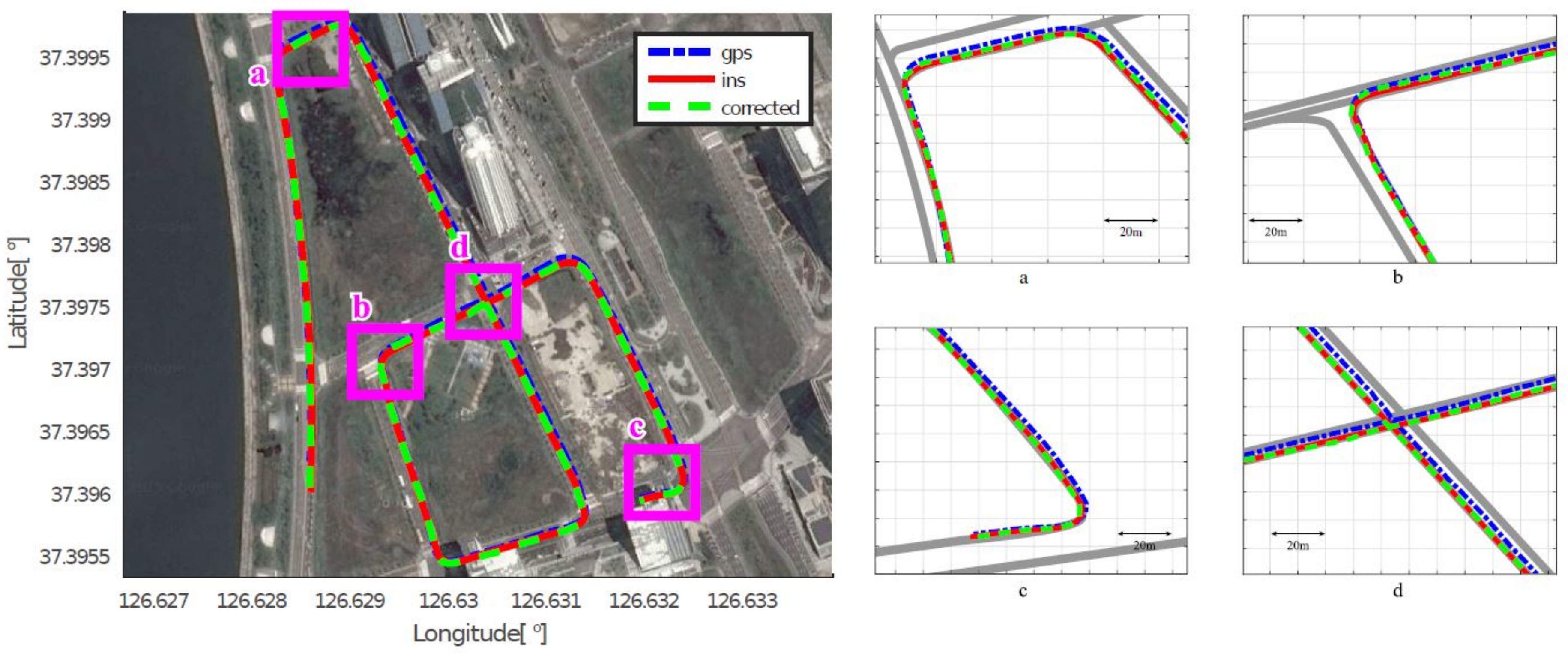
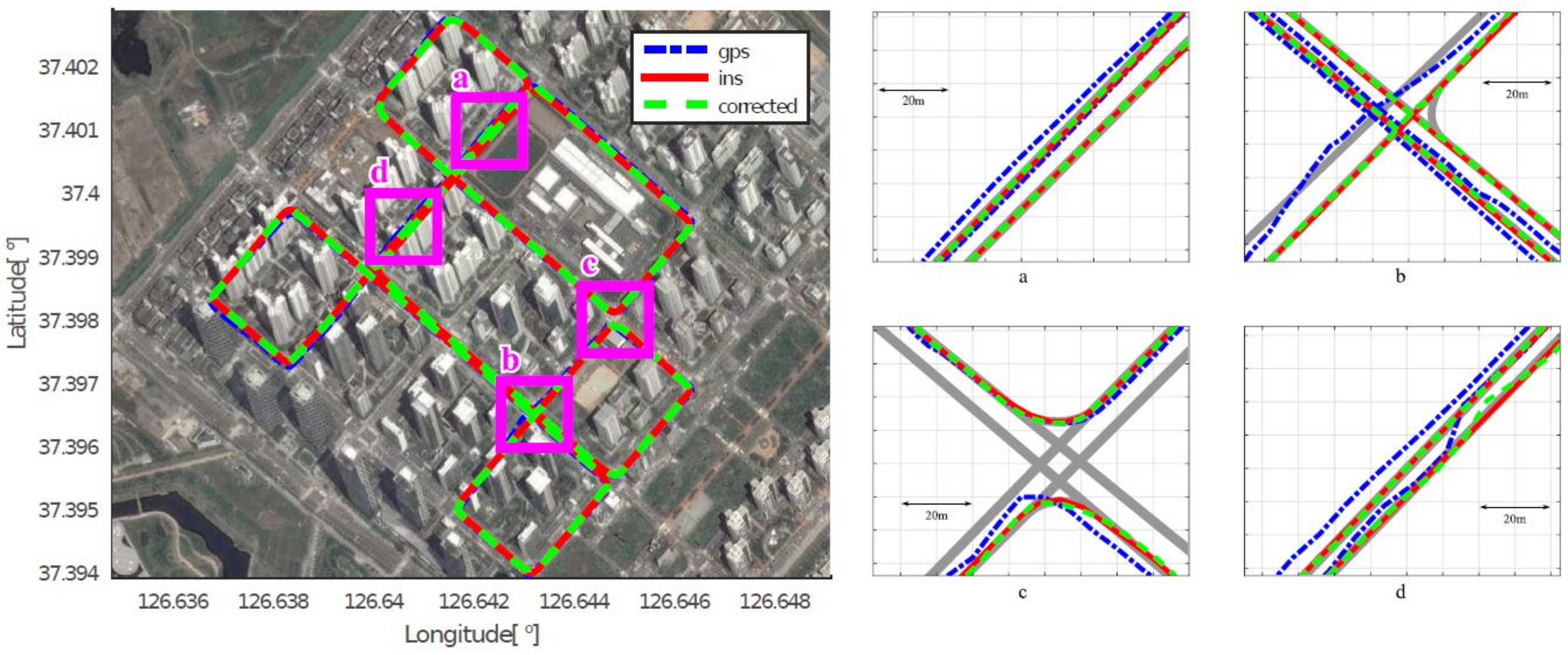
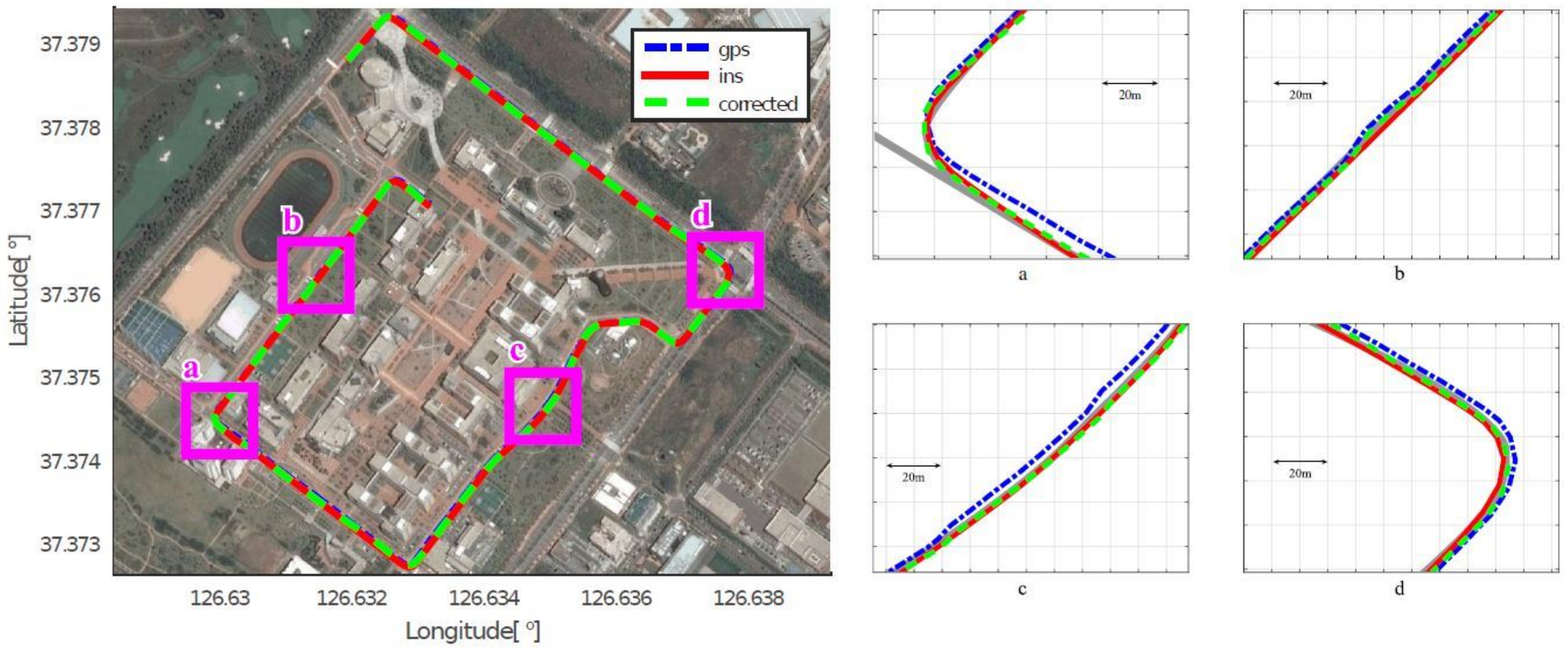
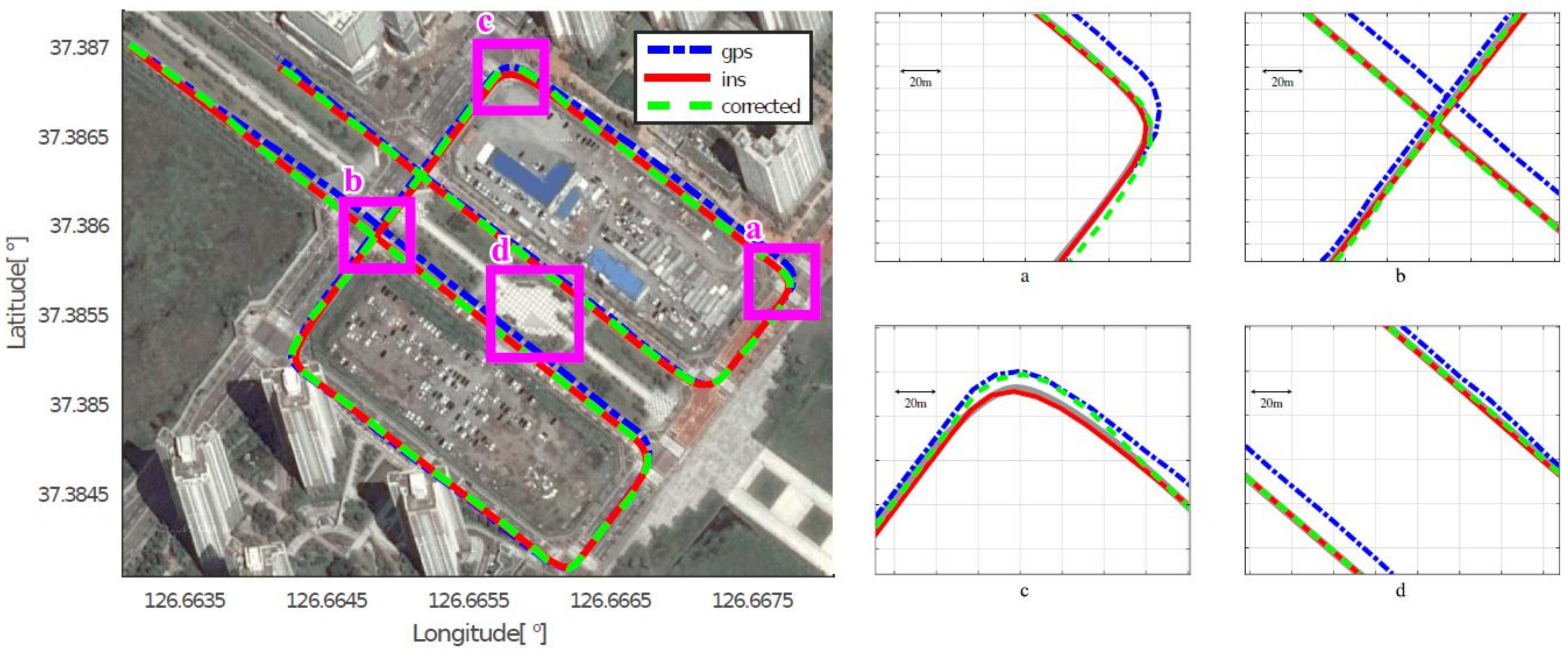
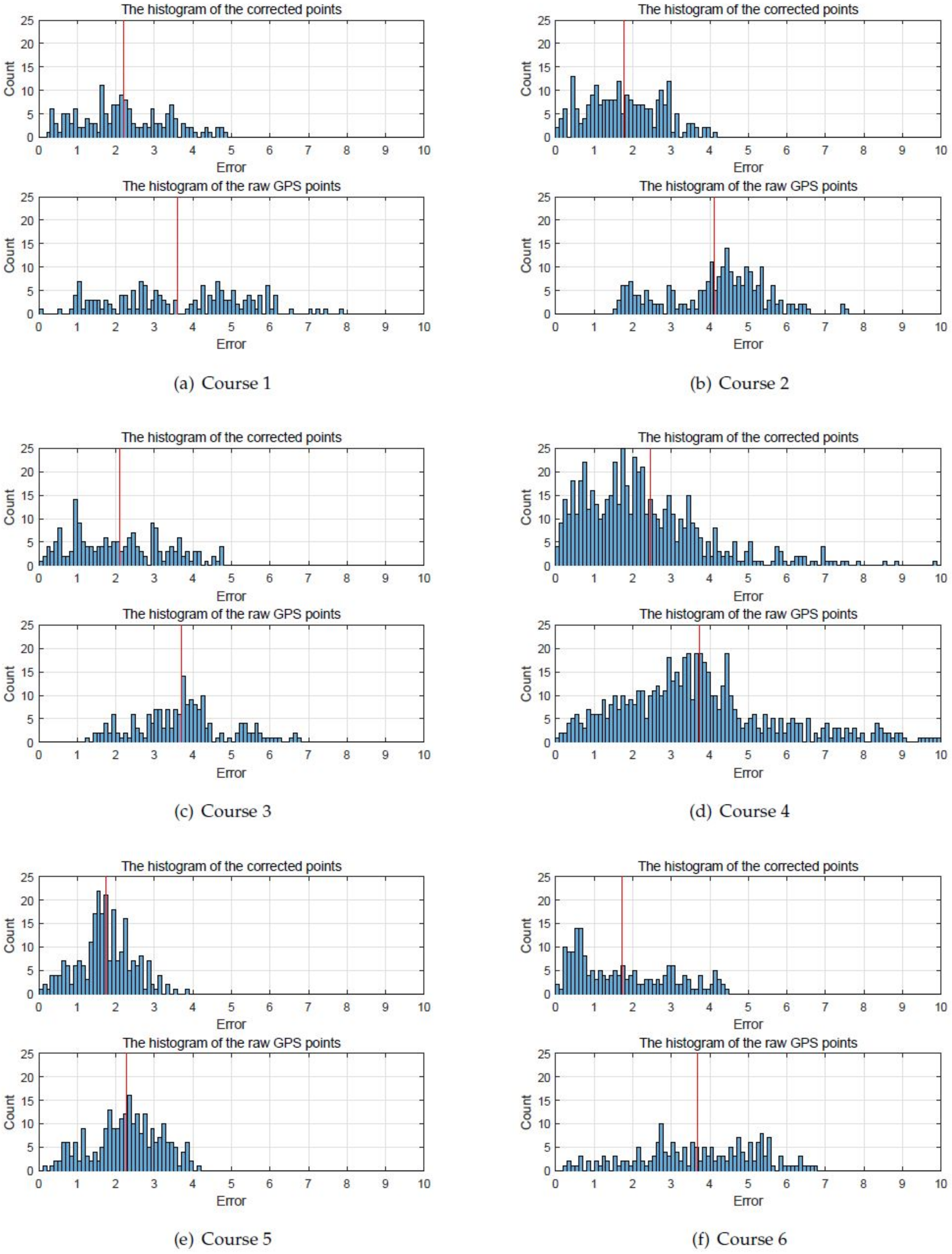
4.3. Experimental Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shin, J.; Huh, J.; Park, Y. Asymptotically stable path following for lateral motion of unmanned ground vehicle. Control Eng. Pract. 2013, 40, 102–112. [Google Scholar] [CrossRef]
- Thrun, S. Toward robotic cars. Commun. ACM 2010, 53, 99–106. [Google Scholar] [CrossRef]
- Kim, G.; Lee, D.G.; Kim, B. Path planning for avoiding obstacles for unmanned ground vehicles. In Advanced Multimedia and Ubiquitous Engineering; Springer: Berlin/Heidelberg, Germany, 2015; Volume 354, pp. 211–217. [Google Scholar]
- Kim, D.; Oh, S.M.; Rehg, J.M. Traversability classification for UGV navigation: A comparison of patch and superpixel representations. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 3166–3173. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Gioia, C.; Borio, D. A statistical characterization of the Galileo-to-GPS inter-system bias. J. Geod. 2016, 90, 1279–1291. [Google Scholar] [CrossRef]
- Gioia, C. GNSS Navigation in Difficult Environments: Hybridization and Reliability. Ph.D. Thesis, University Parthenope of Naples, Naples, Italy, 2014. [Google Scholar]
- Angrisano, A.; Gaglione, S.; Gioia, C. Perfermance assessment of aided Global Navigation Satellite System for land navigation. IET Radar Sonar Navig. 2013, 7, 671–680. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglione, S.; Del Core, G.; Gioia, C. GNSS reliability testing in signal-degraded scenario. Int. J. Navig. Obs. 2013, 2013, 870365. [Google Scholar] [CrossRef]
- Rezaei, S.; Sengupta, R. Kalman filter-based integration of DGPS and vehicle sensors for localization. IEEE Trans. Control Syst. Technol. 2007, 15, 1080–1088. [Google Scholar] [CrossRef]
- Busse, F.D.; How, J.P.; Simpson, J. Demonstration of adaptive extended kalman filter for low-earth-orbit formation estimation Using CDGPS. Navigation 2003, 50, 19–93. [Google Scholar] [CrossRef]
- Tamura, Y.; Matsui, M.; Pagnini, L.C.; Ishibashi, R.; Yoshida, A. Measurement of wind-induced response of building using RTK-GPS. J. Wind Eng. Ind. Aerod. 2012, 49, 18–22. [Google Scholar] [CrossRef]
- Lee, B.H.; Im, S.H.; Heo, M.B.; Jee, G.I. Curve-Modeled lane detection based GPS lateral error correction enhancement. J. Inst. Control Robot. Syst. 2015, 21, 81–86. [Google Scholar] [CrossRef]
- Levinson, J.; Thrun, S. Robust vehicle localization in urban environments using probabilistic maps. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4372–4378. [Google Scholar]
- Serfling, M.; Schweiger, R.; Ritter, W. Road course estimation in a night vision application using a digital map, a camera sensor and a prototypical imaging radar system. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 810–815. [Google Scholar]
- Bernstein, D.; Kornhauser, A. An Introduction to Map Matching for Personal Navigation Assistants; The National Academies of Sciences, Engineering, and Medicine: Washington, WA, USA, 1998. [Google Scholar]
- White, C.E.; Bernstein, D.; Kornhauser, A.L. Some map matching algorithms for personal navigation assistants. Transp. Res. Part C Emerg. Technol. 2000, 8, 91–108. [Google Scholar] [CrossRef]
- Jimenez, F.; Monzon, S.; Naranjo, J.E. Definition of an enhanced map-matching algorithm for urban environments with poor GNSS signal quality. Sensors 2016, 16, 193. [Google Scholar] [CrossRef] [PubMed]
- Lou, Y.; Zhang, C.; Zheng, Y.; Xie, X.; Wang, W.; Huang, Y. Map-matching for low-sampling-rate GPS trajectories. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information System, Seattle, WA, USA, 4–6 November 2009; pp. 352–361. [Google Scholar]
- Li, Y.; Huang, Q.; Kerber, M.; Zhang, L.; Guibas, L. Large-scale joint map matching of GPS traces. In Proceedings of the 21st ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Orlando, FL, USA, 5–8 November 2013; pp. 214–223. [Google Scholar]
- Ochieng, W.Y.; Quddus, M.A.; Noland, R.B. Map-matching in complex urban road networks. Braz. J. Cartogr. 2003, 55, 1–14. [Google Scholar]
- Quddus, M.A.; Noland, R.B.; Ochieng, W.Y. A high accuracy fuzzy logic-based map-matching algorithm for road transport. J. Intell. Transp. Syst. 2006, 10, 103–115. [Google Scholar] [CrossRef]
- Hashemi, M.; Karimi, H.A. A critical review of real-time map-matching algorithms: Current issues and future directions. Comput. Environ. Urban Syst. 2014, 48, 153–165. [Google Scholar] [CrossRef]
- Xiao, Z.; Jiang, K.; Xie, S.; Wen, T.; Yu, C.; Yang, D. Monocular vehicle self-localization method based on compact semantic map. arXiv, 2018; arXiv:1805.06155. [Google Scholar]
- Wang, L.; Zhang, Y.; Wang, J. Map-based localization method for autonomous vehicles using 3D-LIDAR. IFAC-PapersOnLine 2017, 50, 276–281. [Google Scholar] [CrossRef]
- Choe, T.S.; Kang, J.M.; Kim, H.S.; Park, J.B. Low-end GPS position accuracy enhancement method by using map information. Trans. Korean Inst. Electr. Eng. 2017, 65, 659–665. [Google Scholar] [CrossRef]
- Chiang, Y.Y.; Knoblock, C.A. Automatic extraction of road intersection position, connectivity, and orientations from raster maps. In Proceedings of the 16th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Irvine, CA, USA, 5–7 November 2008; pp. 1–10. [Google Scholar]
- Besl, P.J.; Mckay, N.D. Method for registration of 3-D shapes. In Sensor Fusion IV: Control Paradigms and Data Structures; International Society for Optics and Photonics: Bellingham, WA, USA, 1992; Volume 1611, pp. 586–607. [Google Scholar]
- Specht, A.R.; Devy, M.; Sappa, A. Robustness to Initial Conditions in Registration of Range Images Using the ICP Algorithm. Available online: http://www.cvc.uab.es/ asappa/publications/CISRA.pdf (accessed on 8 November 2018).
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- STMicroelectronics Inc. STM32F405VG. Available online: http://www.webcitation.org/6hjayc5XG (accessed on 7 November 2018).
- NovAtel Inc. UIMU-H58. Available online: http://www.webcitation.org/6hjaRYLku (accessed on 7 November 2018).
- NovAtel Inc. SPAN-SE. Available online: http://www.webcitation.org/6hjarC9o9 (accessed on 7 November 2018).
- NovAtel Inc. GPS-703-GGG. Available online: http://www.webcitation.org/6hjcvSknC (accessed on 7 November 2018).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Course 1 | Course 2 | Course 3 | Course 4 | Course 5 | Course 6 | |
|---|---|---|---|---|---|---|
| Length (km) | 1.46 | 1.82 | 1.85 | 5.55 | 2.15 | 1.67 |
| Number of GPS points | 220 | 249 | 212 | 647 | 281 | 191 |
| Course | Avg. (GPS) (m) | Std. (GPS) (m) | Avg. (Prop.) (m) | Std. (Prop.) (m) | Improv. (%) |
|---|---|---|---|---|---|
| Course 1 | 3.6013 | 1.7243 | 2.0023 | 1.1261 | 44.4006 |
| Course 2 | 4.1199 | 1.3088 | 1.5535 | 0.9537 | 62.2927 |
| Course 3 | 3.7037 | 1.1829 | 1.9854 | 1.0841 | 46.3941 |
| Course 4 | 3.7408 | 2.1175 | 2.0153 | 2.2406 | 46.1264 |
| Course 5 | 2.2805 | 0.8799 | 1.5031 | 0.6587 | 34.0890 |
| Course 6 | 3.6874 | 1.5508 | 1.4432 | 1.2074 | 60.8613 |
| Course 1 | Course 2 | Course 3 | Course 4 | Course 5 | Course 6 | |
|---|---|---|---|---|---|---|
| w/o RPS (s) | 0.059 | 0.066 | 0.056 | 0.178 | 0.071 | 0.049 |
| w/ RPS (s) | 0.036 | 0.043 | 0.034 | 0.119 | 0.046 | 0.031 |
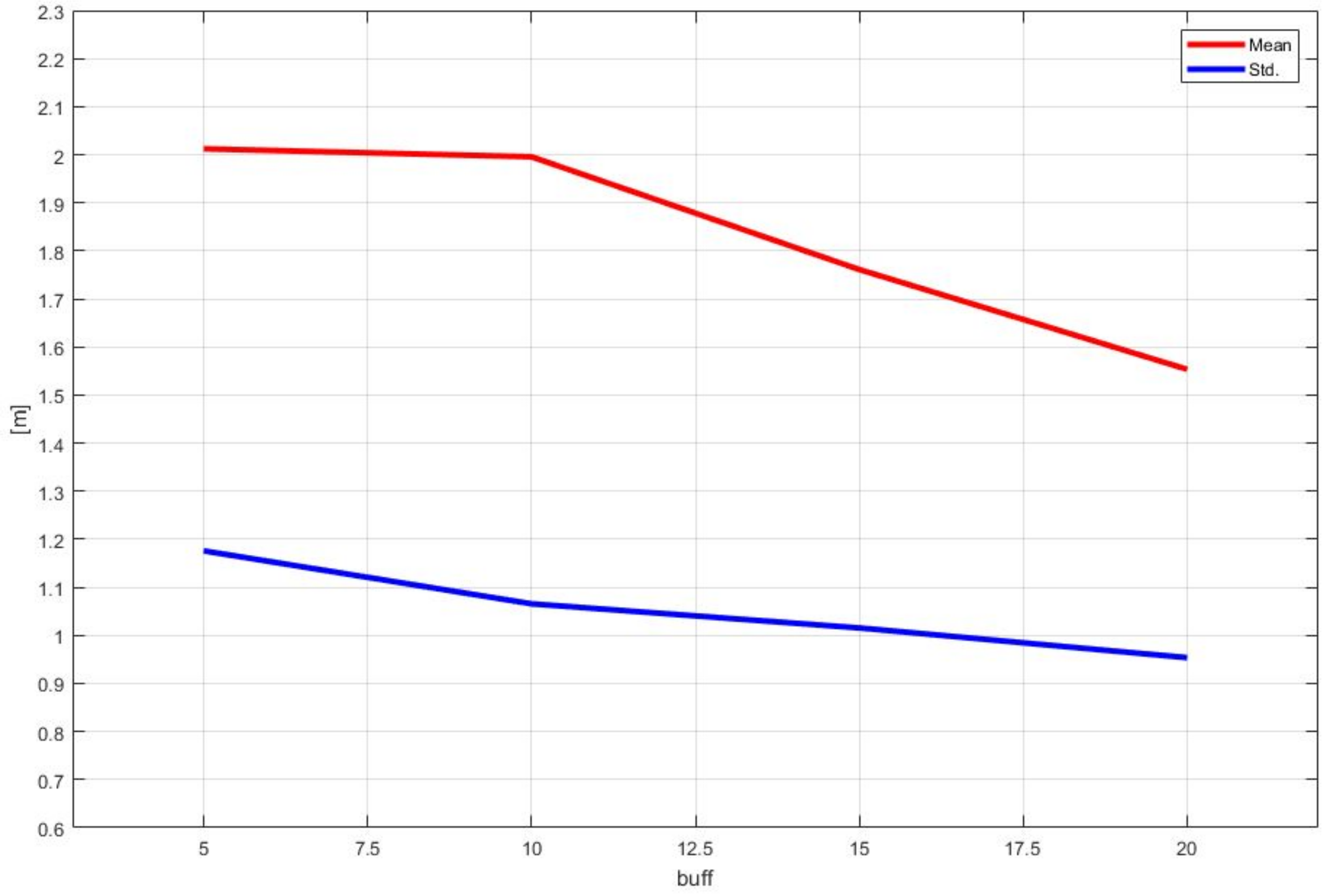
| buff | 5 | 10 | 15 | 20 |
|---|---|---|---|---|
| Mean (m) | 2.0123 | 1.9957 | 1.7611 | 1.5535 |
| Std. (m) | 1.1759 | 1.0657 | 1.0155 | 0.9537 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, J.M.; Kim, H.S.; Park, J.B.; Choi, Y.H. An Enhanced Map-Matching Algorithm for Real-Time Position Accuracy Improvement with a Low-Cost GPS Receiver. Sensors 2018, 18, 3836. https://doi.org/10.3390/s18113836
Kang JM, Kim HS, Park JB, Choi YH. An Enhanced Map-Matching Algorithm for Real-Time Position Accuracy Improvement with a Low-Cost GPS Receiver. Sensors. 2018; 18(11):3836. https://doi.org/10.3390/s18113836
Chicago/Turabian StyleKang, Jeong Min, Han Sol Kim, Jin Bae Park, and Yoon Ho Choi. 2018. "An Enhanced Map-Matching Algorithm for Real-Time Position Accuracy Improvement with a Low-Cost GPS Receiver" Sensors 18, no. 11: 3836. https://doi.org/10.3390/s18113836
APA StyleKang, J. M., Kim, H. S., Park, J. B., & Choi, Y. H. (2018). An Enhanced Map-Matching Algorithm for Real-Time Position Accuracy Improvement with a Low-Cost GPS Receiver. Sensors, 18(11), 3836. https://doi.org/10.3390/s18113836