V-RBNN Based Small Drone Detection in Augmented Datasets for 3D LADAR System

 ,
,  ,
,
Abstract
1. Introduction
2. Related Works
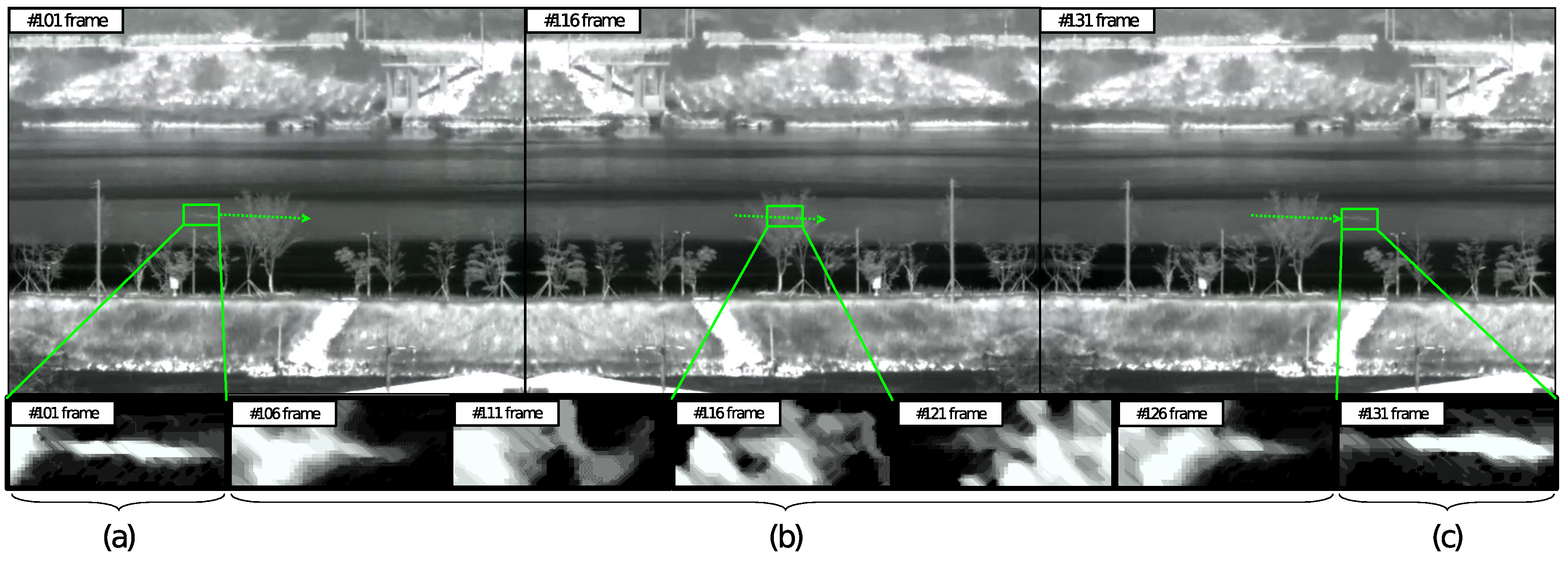
2.1. EO/IR Imaging System for Drone Detection
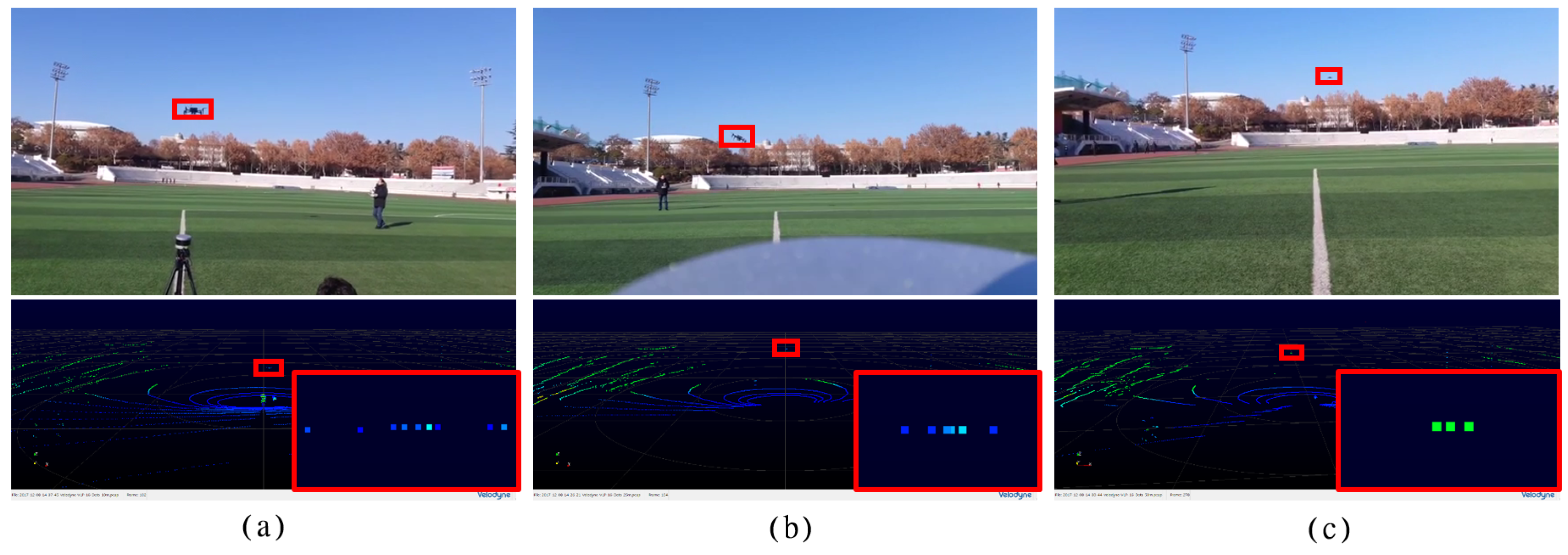
2.2. Basic Experiment Using 3D LiDAR
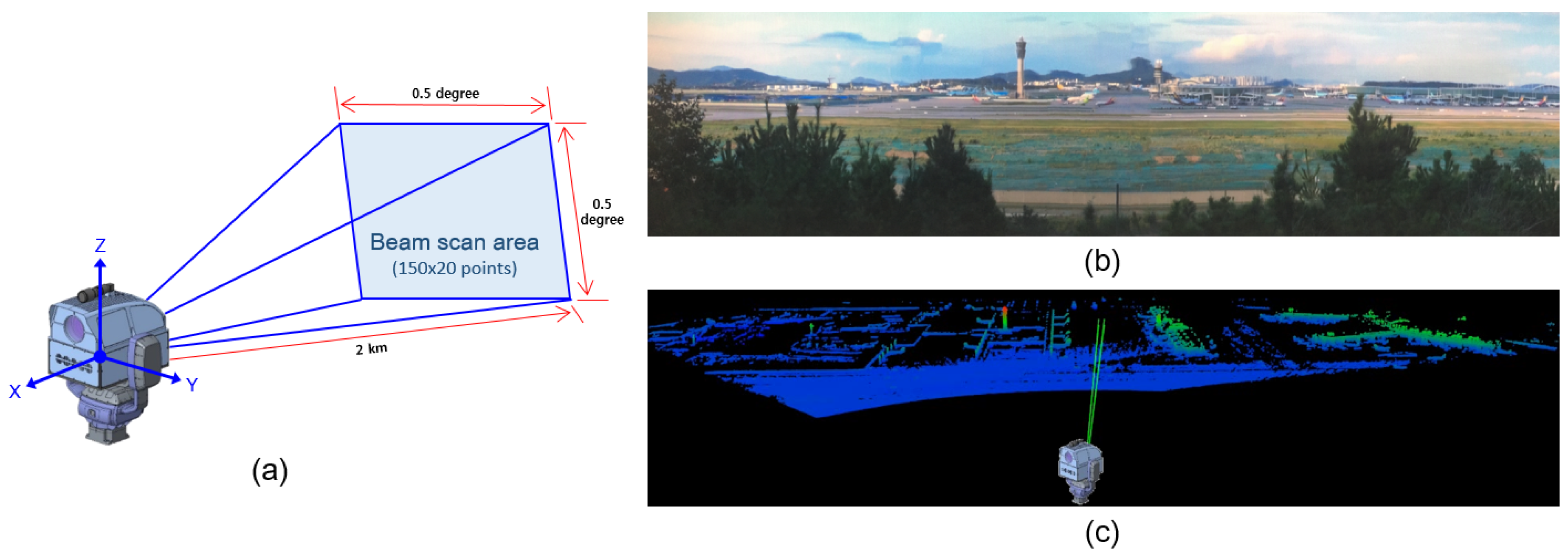
2.3. Proposed 3D Scanning System (LADAR)
2.4. Detection Speed of LADAR
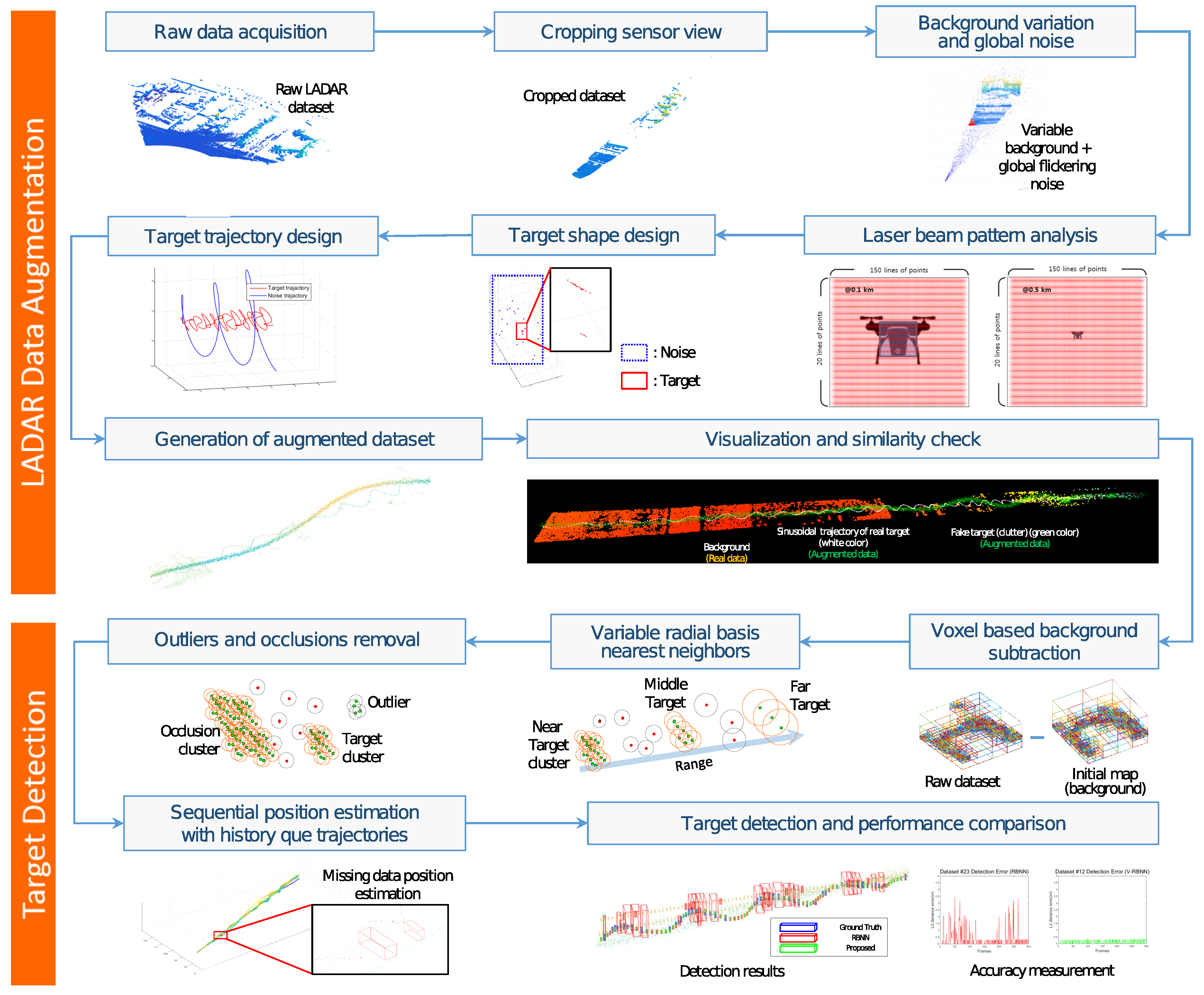
3. Generation of Targets and Noises
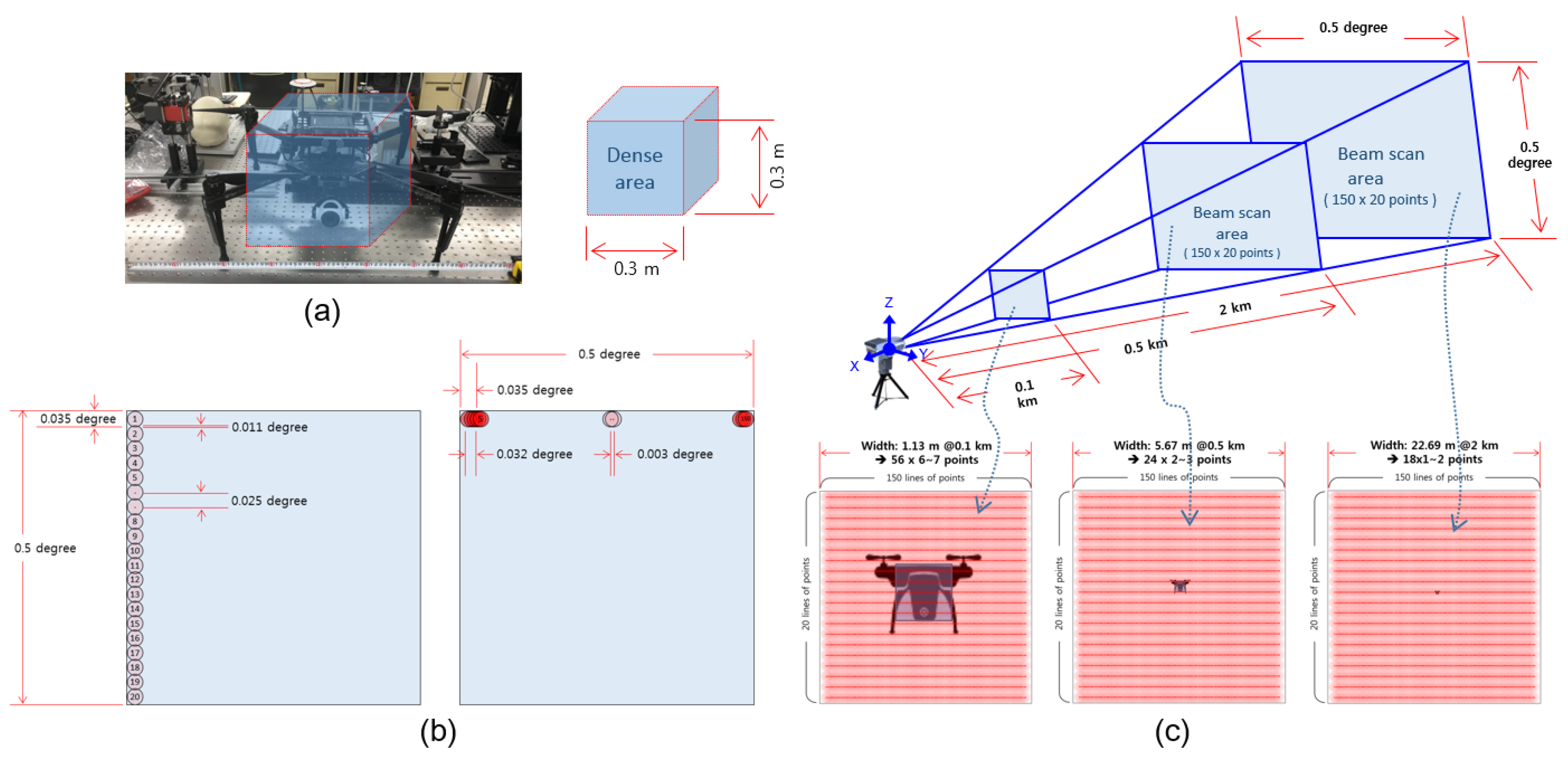
3.1. Laser Beam Analysis
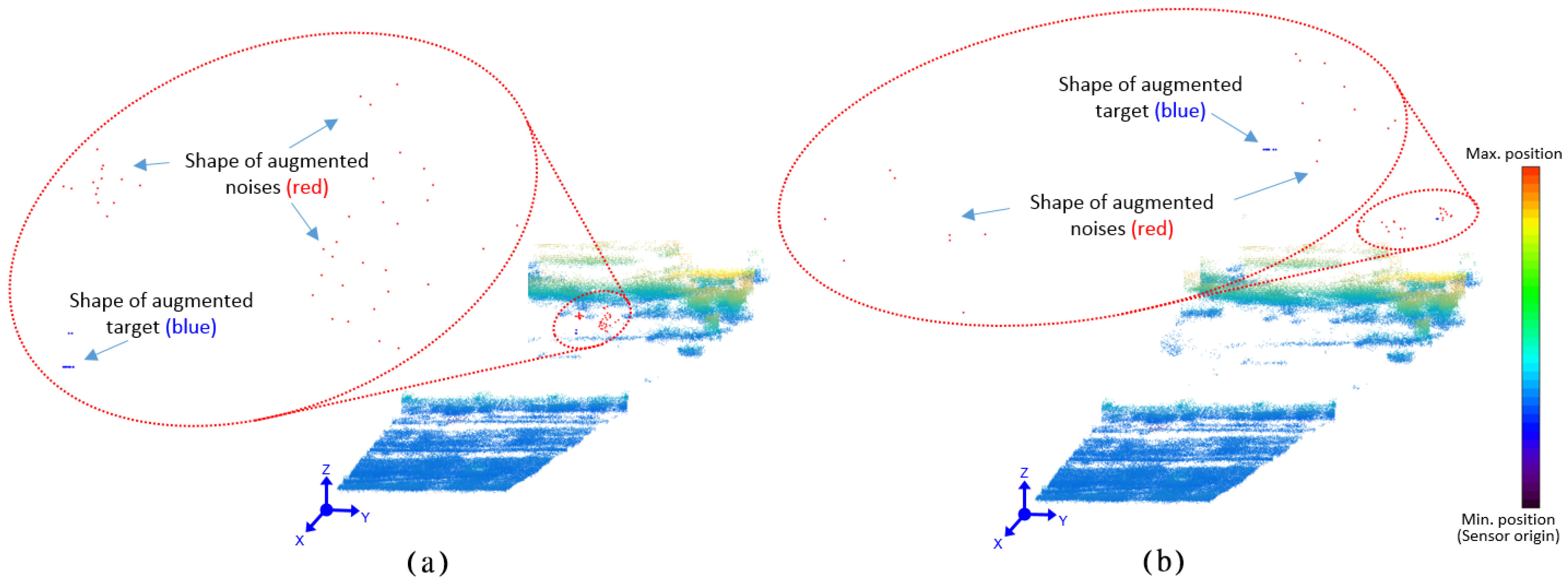
3.2. Shape of Target and Noise
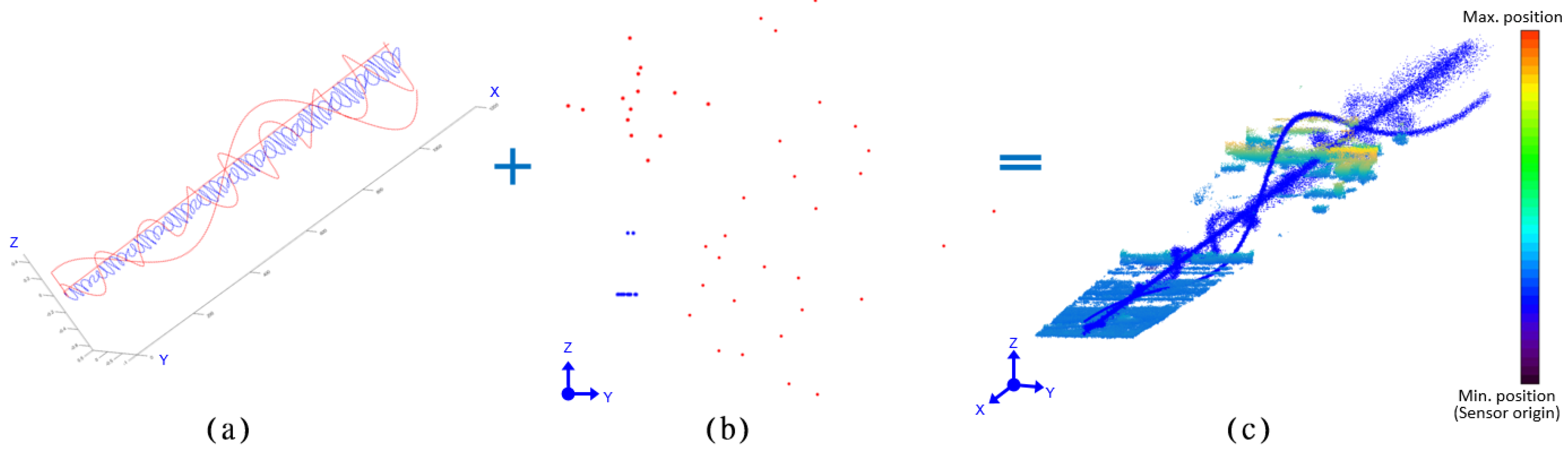
3.3. Trajectory Design
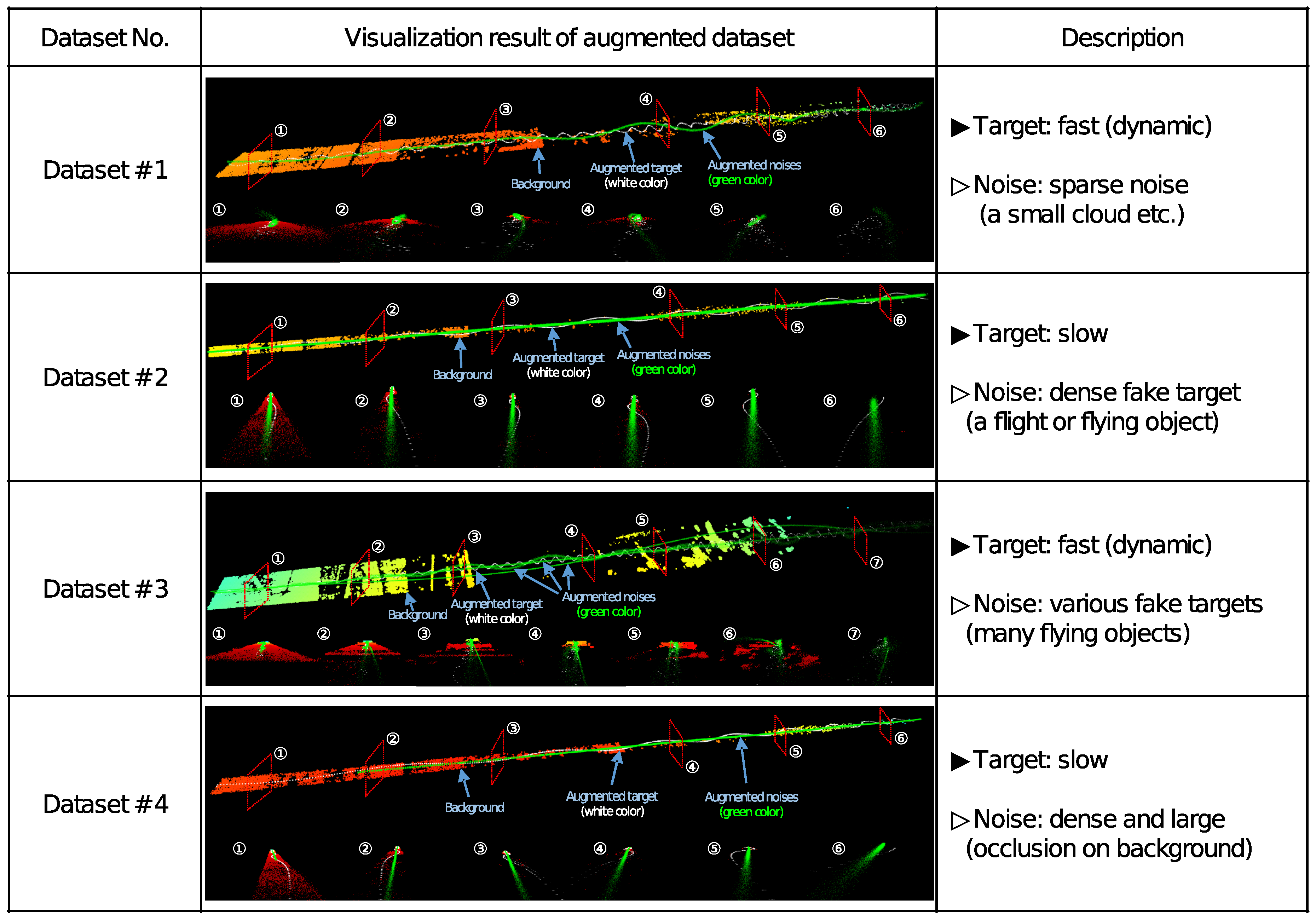
4. Augmentation and Visualization
5. Target Detection
| Algorithm 1: The V-RBNN-based target detection. |
1: // Background subtraction 2: 3: 4: 5: // V-RBNN 6: 7: (//tunable constant parameters) 8: 9: 10: // Outlier and occlusion removal 11: 12: if ( ) 13: 14: else 15: 16: // Sequential position estimation 17: if ( ) 18: 19: else 20: |
5.1. 3D Background Subtraction
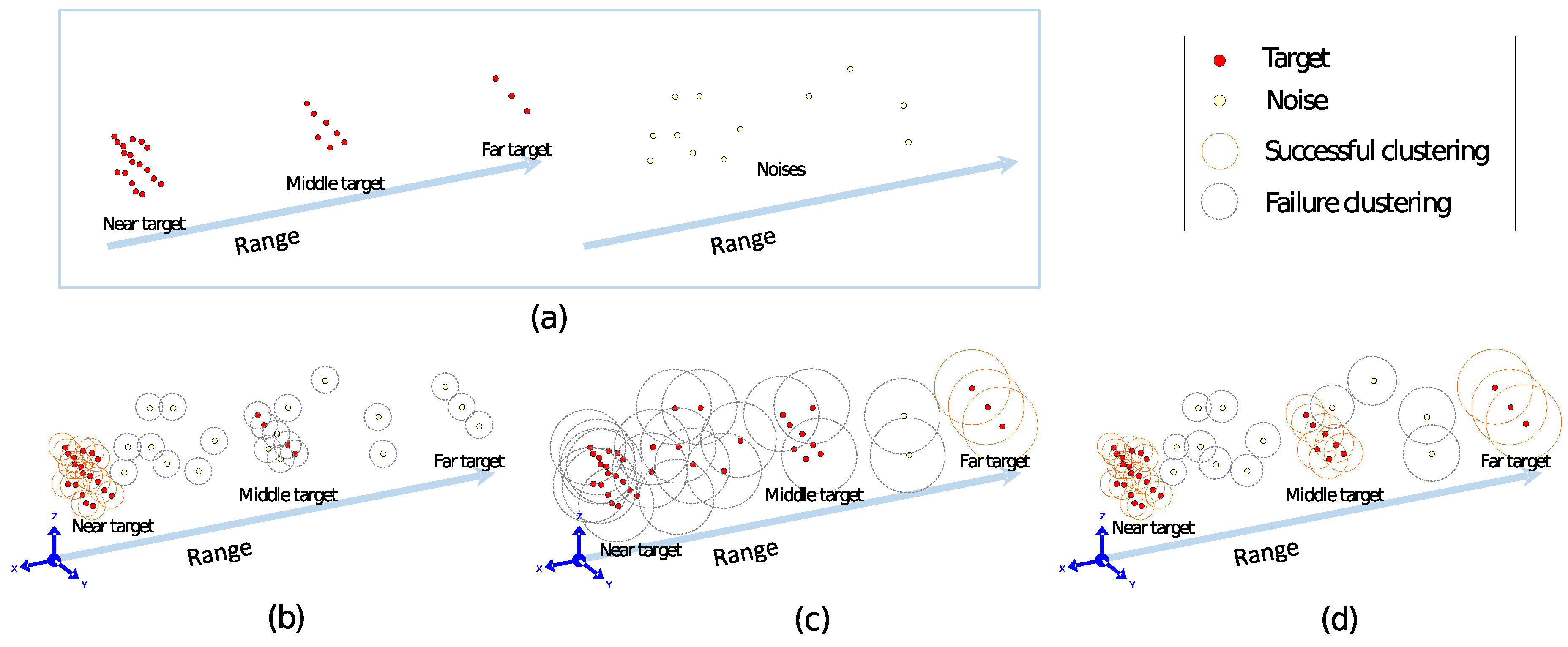
5.2. Variable Radially Bounded Nearest Neighbor (V-RBNN)
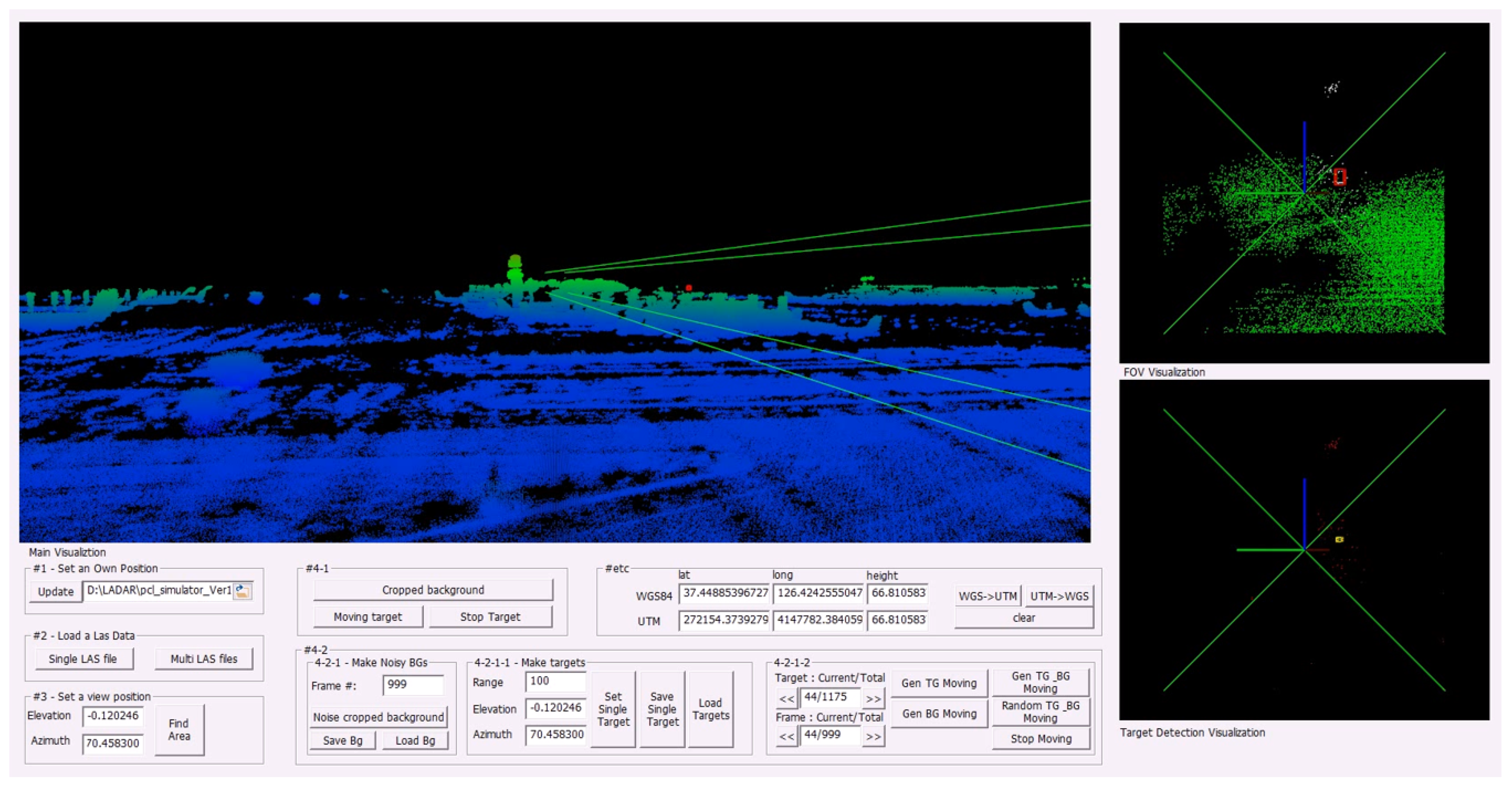
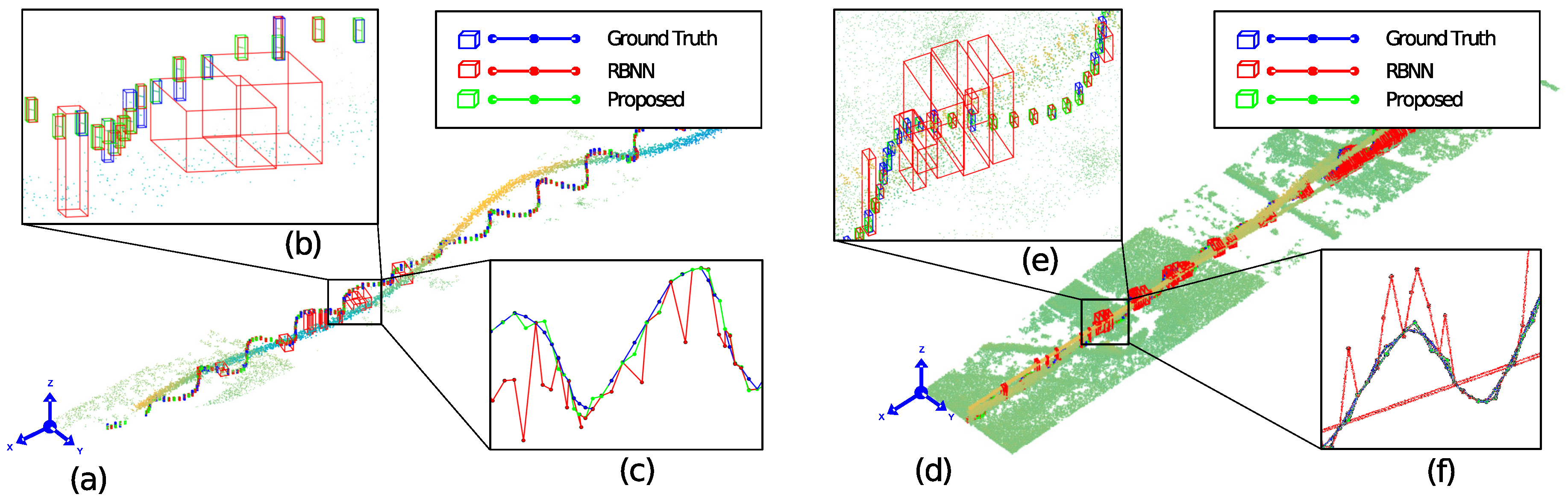
5.3. GUI Software and Experiments
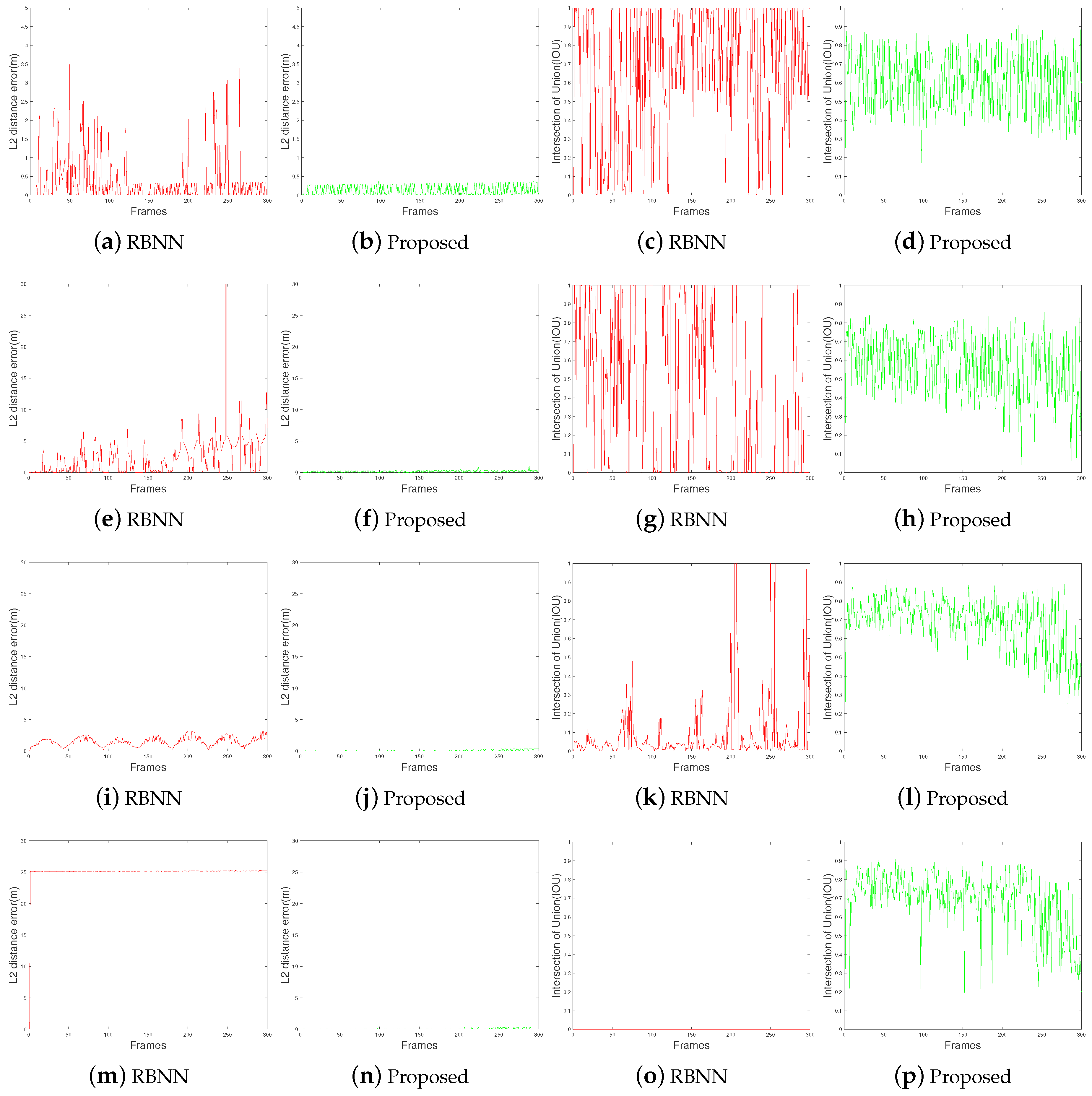
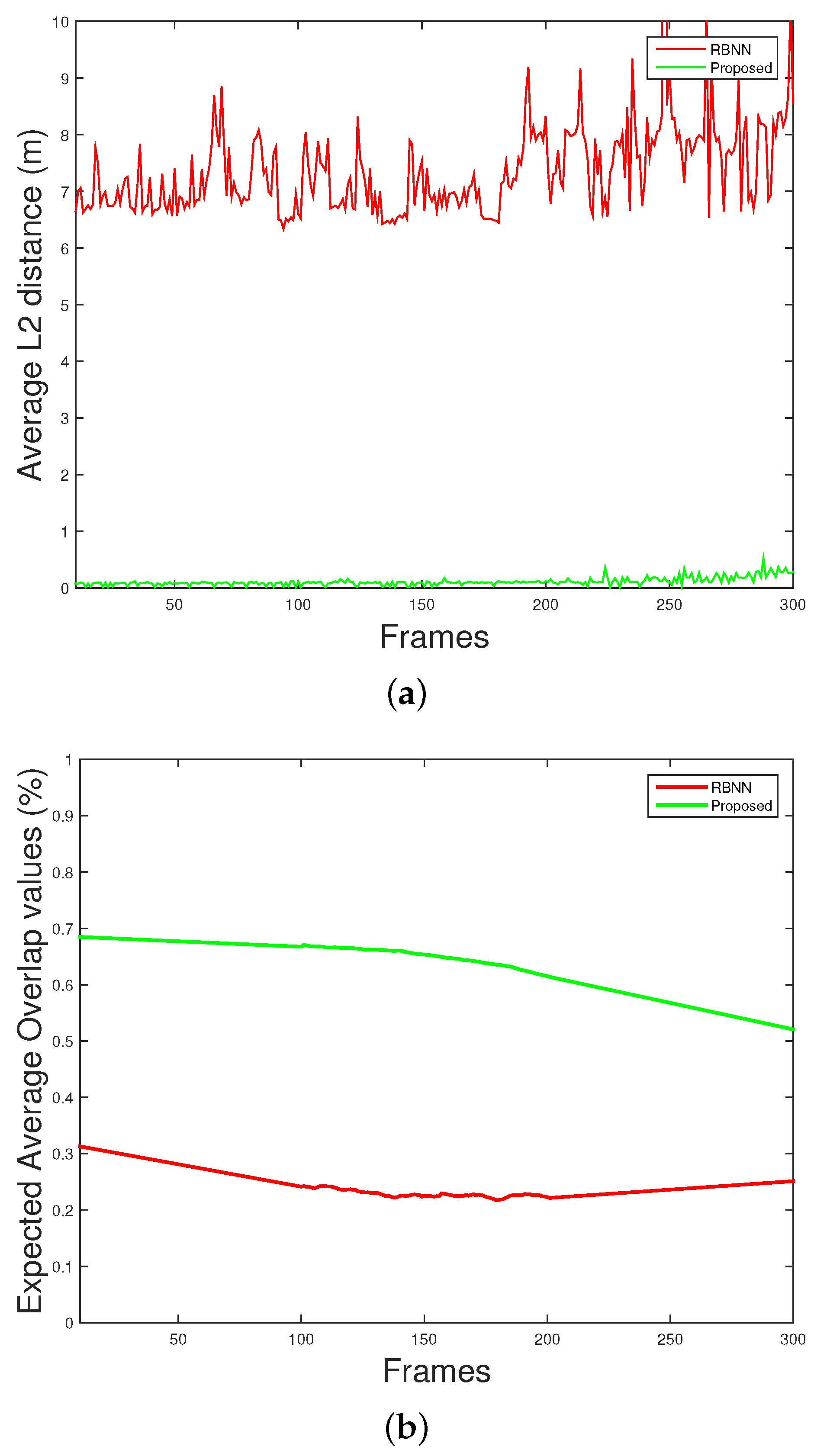
6. Quantitative Measurement
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Guvenc, I.; Koohifar, F.; Singh, S.; Sichitiu, M.L.; Matolak, D. Detection, tracking, and interdiction for amateur drones. IEEE Commun. Mag. 2018, 56, 75–81. [Google Scholar] [CrossRef]
- Solodov, A.; Williams, A.; Al Hanaei, S.; Goddard, B. Analyzing the threat of unmanned aerial vehicles (UAV) to nuclear facilities. Secur. J. 2018, 31, 305–324. [Google Scholar] [CrossRef]
- Drozdowicz, J.; Wielgo, M.; Samczynski, P.; Kulpa, K.; Krzonkalla, J.; Mordzonek, M.; Bryl, M.; Jakielaszek, Z. 35 GHz FMCW drone detection system. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016. [Google Scholar]
- Müller, T. Robust drone detection for day/night counter-UAV with static VIS and SWIR cameras. In Proceedings of the Ground/Air Multisensor Interoperability, Integration, and Networking for Persistent ISR VIII. International Society for Optics and Photonics, Anaheim, CA, USA, 10–13 April 2017; Volume 10190, p. 1019018. [Google Scholar]
- Cardone, D.; Merla, A. New frontiers for applications of thermal infrared imaging devices: Computational psychopshysiology in the neurosciences. Sensors 2017, 17, 1042. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wang, B.; Liu, B.; Meng, X.; Yang, G. Pedestrian recognition and tracking using 3D LiDAR for autonomous vehicle. Robot. Auton. Syst. 2017, 88, 71–78. [Google Scholar] [CrossRef]
- Premebida, C.; Ludwig, O.; Nunes, U. LIDAR and vision-based pedestrian detection system. J. Field Robot. 2009, 26, 696–711. [Google Scholar] [CrossRef]
- Musleh, B.; García, F.; Otamendi, J.; Armingol, J.M.; De la Escalera, A. Identifying and tracking pedestrians based on sensor fusion and motion stability predictions. Sensors 2010, 10, 8028–8053. [Google Scholar] [CrossRef] [PubMed]
- Azim, A.; Aycard, O. Detection, classification and tracking of moving objects in a 3D environment. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium (IV), Alcala de Henares, Spain, 3–7 June 2012; pp. 802–807. [Google Scholar]
- Lenac, K.; Kitanov, A.; Cupec, R.; Petrović, I. Fast planar surface 3D SLAM using LIDAR. Robot. Auton. Syst. 2017, 92, 197–220. [Google Scholar] [CrossRef]
- Morris, D.D.; Colonna, B.; Haley, P. Ladar-based mover detection from moving vehicles. Gen. Dyn. Robot. Syst. 2006, arXiv:1709.08515. [Google Scholar]
- Bogoslavskyi, I.; Stachniss, C. Fast range image-based segmentation of sparse 3D laser scans for online operation. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 163–169. [Google Scholar]
- Laurenzis, M.; Hengy, S.; Hommes, A.; Kloeppel, F.; Shoykhetbrod, A.; Geibig, T.; Johannes, W.; Naz, P.; Christnacher, F. Multi-sensor field trials for detection and tracking of multiple small unmanned aerial vehicles flying at low altitude. In Proceedings of the Signal Processing, Sensor/Information Fusion, and Target Recognition XXVI. International Society for Optics and Photonics, Anaheim, CA, USA, 11–12 April 2017; Volume 10200, p. 102001. [Google Scholar]
- Anjum, N.; Cavallaro, A. Multifeature object trajectory clustering for video analysis. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 1555–1564. [Google Scholar] [CrossRef]
- Navarro-Serment, L.E.; Mertz, C.; Hebert, M. Pedestrian detection and tracking using three-dimensional ladar data. Int. J. Robot. Res. 2010, 29, 1516–1528. [Google Scholar] [CrossRef]
- Kim, B.H.; Khan, D.; Bohak, C.; Kim, J.K.; Choi, W.; Lee, H.J.; Kim, M.Y. Ladar data generation fused with virtual targets and visualization for small drone detection system. In Proceedings of the Technologies for Optical Countermeasures XV. International Society for Optics and Photonics, Berlin, Germany, 10–13 September 2018; Volume 10797, p. 107970. [Google Scholar]
- Girardeau-Montaut, D.; Roux, M.; Marc, R.; Thibault, G. Change detection on points cloud data acquired with a ground laser scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, W19. [Google Scholar]
- Klasing, K.; Wollherr, D.; Buss, M. A clustering method for efficient segmentation of 3D laser data. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 4043–4048. [Google Scholar]
- Ling, B.; Agarwal, S.; Olivera, S.; Vasilkoski, Z.; Phan, C.; Geyer, C. Real-time buried threat detection and cueing capability in VPEF environment. In Proceedings of the Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XX, International Society for Optics and Photonics, Baltimore, MD, USA, 20–24 April 2015; Volume 9454, p. 94540. [Google Scholar]
- Busset, J.; Perrodin, F.; Wellig, P.; Ott, B.; Heutschi, K.; Rühl, T.; Nussbaumer, T. Detection and tracking of drones using advanced acoustic cameras. In Proceedings of the Unmanned/Unattended Sensors and Sensor Networks XI, and Advanced Free-Space Optical Communication Techniques and Applications International Society for Optics and Photonics, Toulouse, France, 23–24 September 2015; Volume 9647, p. 96470. [Google Scholar]
- Mirčeta, K.; Bohak, C.; Kim, B.H.; Kim, M.Y.; Marolt, M. Drone segmentation and tracking in grounded sensor scanned LiDAR datasets. In Proceedings of the Zbornik sedemindvajsete mednarodne Elektrotehniške in računalniške konference ERK 2018, Portorož, Slovenija, 17–18 September 2018; pp. 384–387. [Google Scholar]
- Pak, J.M.; Kim, P.S.; You, S.H.; Lee, S.S.; Song, M.K. Extended least square unbiased FIR filter for target tracking using the constant velocity motion model. Int. J. Control Autom. Syst. 2017, 15, 947–951. [Google Scholar] [CrossRef]
- Shackleton, J.; VanVoorst, B.; Hesch, J. Tracking people with a 360-degree lidar. In Proceedings of the 2010 7th IEEE International Conference on Advanced Video and Signal Based Surveillance, Boston, MA, USA, 29 August–1 September 2010; pp. 420–426. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Fournier, J.; Ricard, B.; Laurendeau, D. Mapping and exploration of complex environments using persistent 3D model. In Proceedings of the Fourth Canadian Conference on Computer and Robot Vision (CRV ’07), Montreal, QC, Canada, 28–30 May 2007; pp. 403–410. [Google Scholar]
- Jessup, J.; Givigi, S.N.; Beaulieu, A. Merging of octree based 3d occupancy grid maps. In Proceedings of the 2014 IEEE International Systems Conference Proceedings, Ottawa, ON, Canada, 31 March–3 April 2014; pp. 371–377. [Google Scholar]
- Shen, Y.; Lindenbergh, R.; Wang, J. Change analysis in structural laser scanning point clouds: The baseline method. Sensors 2016, 17, 26. [Google Scholar] [CrossRef] [PubMed]
- Aijazi, A.K.; Checchin, P.; Trassoudaine, L. Segmentation based classification of 3D urban point clouds: A super-voxel based approach with evaluation. Remote Sens. 2013, 5, 1624–1650. [Google Scholar] [CrossRef]
- Dohan, D.; Matejek, B.; Funkhouser, T. Learning hierarchical semantic segmentations of LIDAR data. In Proceedings of the 2015 International Conference on 3D Vision, Washington, DC, USA, 19–22 October 2015; pp. 273–281. [Google Scholar]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Range | FOV | Target Angle | AZ Lines | EL Lines | AZ + BI | EL + BI | Target |
|---|---|---|---|---|---|---|---|
| (R_m) | (FOV_m) | (T_deg) | (BL_AZ) | (BL_EL) | (TBI_AZ) | (TBI_EL) | (TP) |
| 200 | 2.27 | 0.086 | 20 | 3 | 0.519 | 0.322 | 105 |
| 500 | 5.67 | 0.034 | 8 | 2 | 0.848 | 0.355 | 46 |
| 800 | 9.08 | 0.021 | 5 | 1 | 1.177 | 0.389 | 20 |
| 1100 | 12.48 | 0.016 | 4 | 1 | 1.506 | 0.422 | 19 |
| 1400 | 15.88 | 0.012 | 3 | 1 | 1.834 | 0.455 | 18 |
| 1700 | 19.29 | 0.010 | 3 | 1 | 2.163 | 0.489 | 17 |
| 2000 | 22.69 | 0.009 | 2 | 1 | 2.492 | 0.522 | 17 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, B.H.; Khan, D.; Bohak, C.; Choi, W.; Lee, H.J.; Kim, M.Y. V-RBNN Based Small Drone Detection in Augmented Datasets for 3D LADAR System. Sensors 2018, 18, 3825. https://doi.org/10.3390/s18113825
Kim BH, Khan D, Bohak C, Choi W, Lee HJ, Kim MY. V-RBNN Based Small Drone Detection in Augmented Datasets for 3D LADAR System. Sensors. 2018; 18(11):3825. https://doi.org/10.3390/s18113825
Chicago/Turabian StyleKim, Byeong Hak, Danish Khan, Ciril Bohak, Wonju Choi, Hyun Jeong Lee, and Min Young Kim. 2018. "V-RBNN Based Small Drone Detection in Augmented Datasets for 3D LADAR System" Sensors 18, no. 11: 3825. https://doi.org/10.3390/s18113825
APA StyleKim, B. H., Khan, D., Bohak, C., Choi, W., Lee, H. J., & Kim, M. Y. (2018). V-RBNN Based Small Drone Detection in Augmented Datasets for 3D LADAR System. Sensors, 18(11), 3825. https://doi.org/10.3390/s18113825