Application of Improved Singular Spectrum Decomposition Method for Composite Fault Diagnosis of Gear Boxes

Abstract
1. Introduction
2. Singular Spectral Decomposition Theory
2.1. The Basic Principle of Singular Spectrum Decomposition
2.2. Comparison of Simulation Results between Singular Spectrum Decomposition and Ensemble Empirical Mode Decomposition
3. Minimum Entropy Deconvolution Adjusted Theory
4. Improved Singular Spectrum Decomposition Method
4.1. Limitations of Singular Spectrum Decomposition
4.2. Advantages and Limitations of the Minimum Entropy Deconvolution Adjusted
4.3. Improved Singular Spectrum Decomposition
4.4. Flow Chart of Improved Singular Spectrum Decomposition
5. Simulation
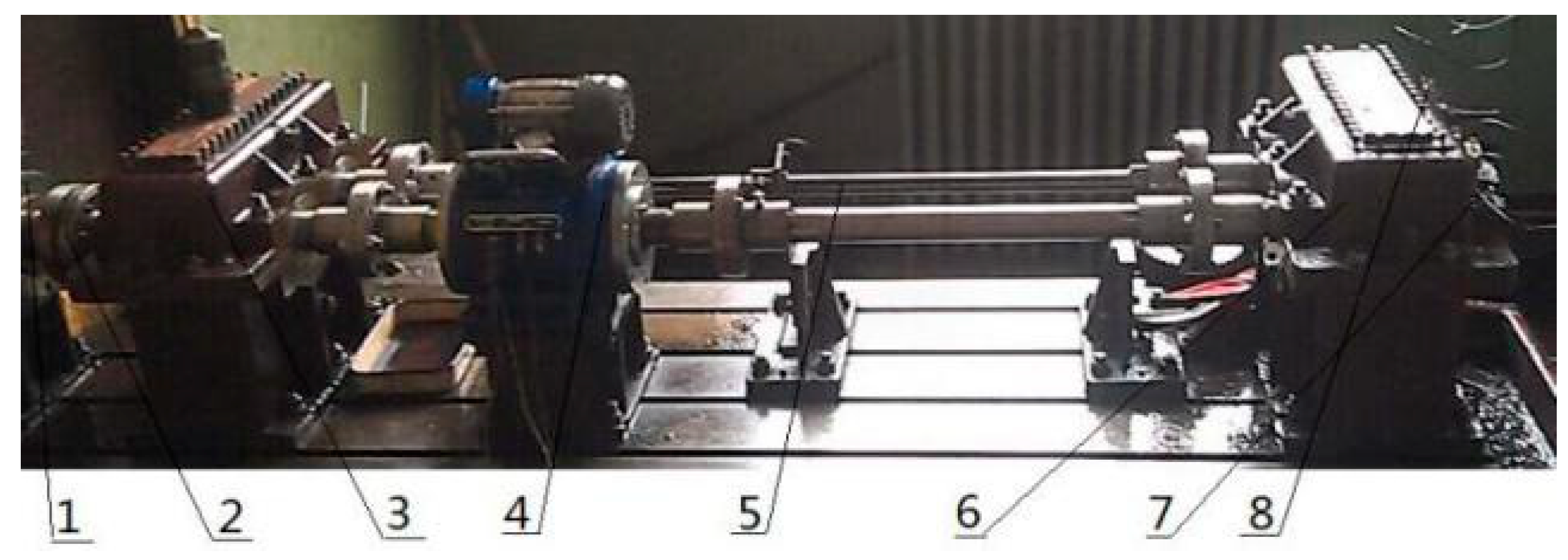
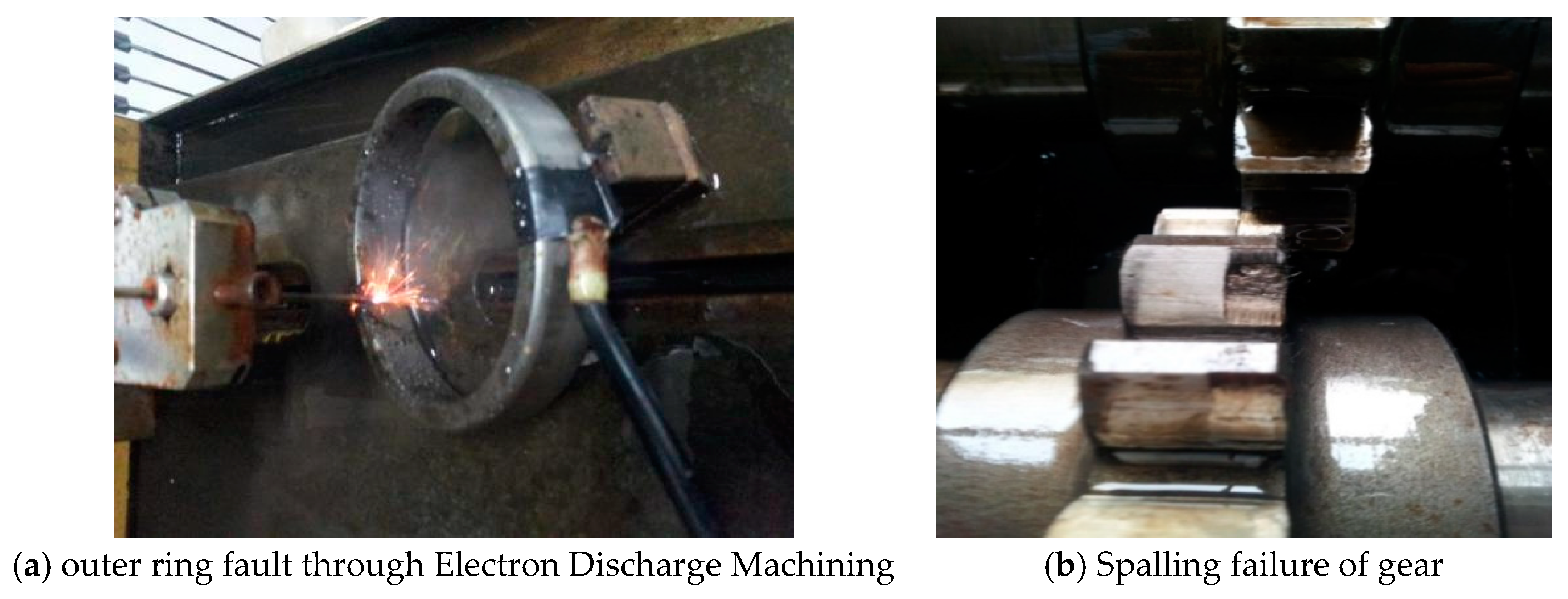
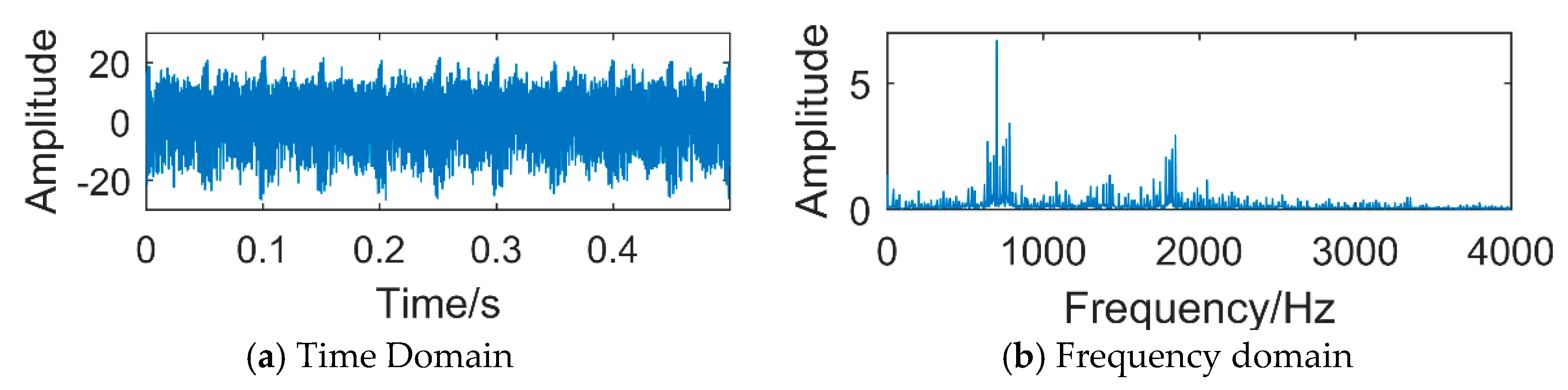
6. Experimental Verification
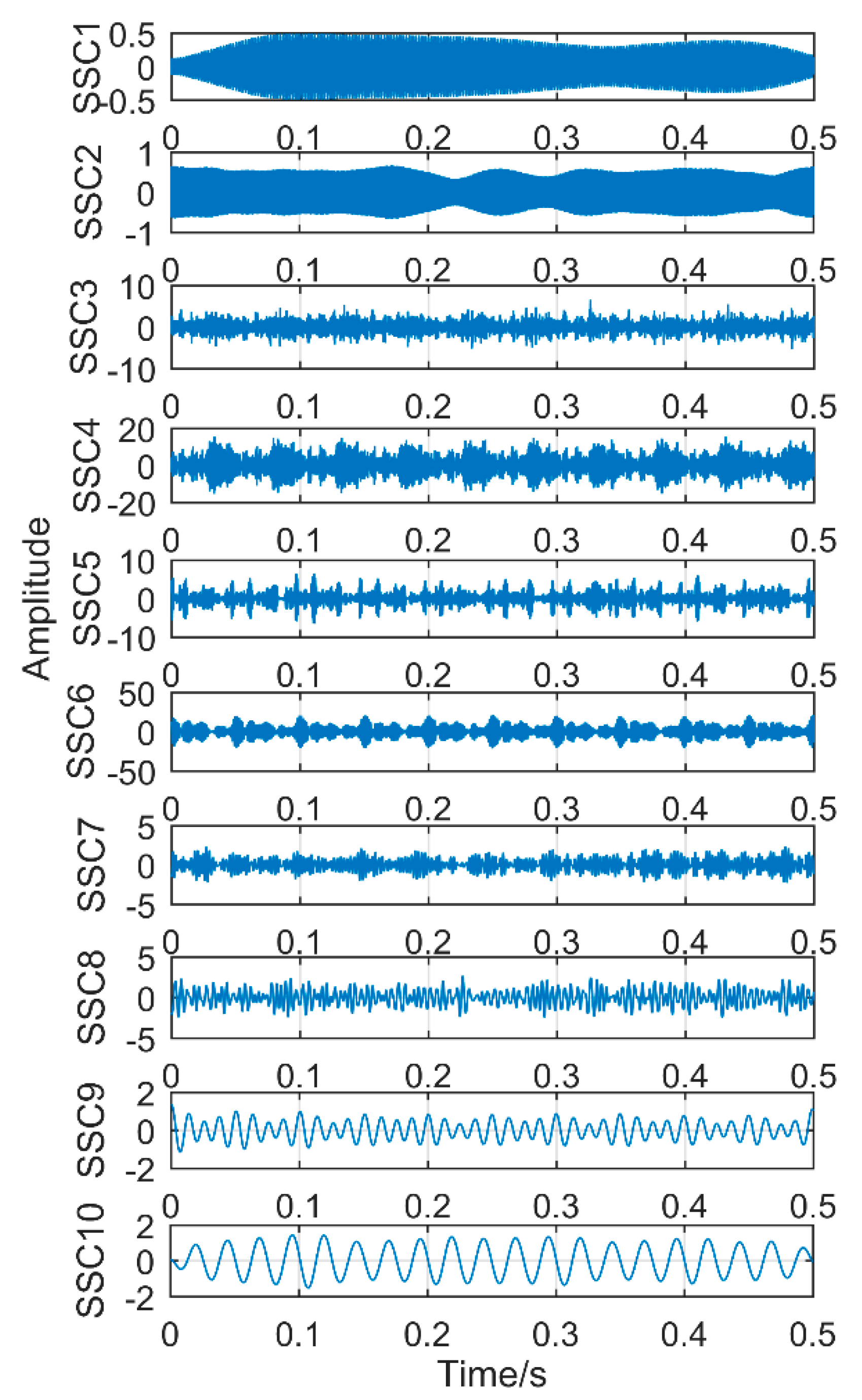
6.1. Decomposition Results Obtained by Traditional Singular Spectrum Decomposition
6.2. Decomposition Resultsobtained by Singular Spectrum Decompositiontraditional
6.3. Decomposition Results Obtained by the Proposed Method
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lei, Y.; Liu, Z.; Wu, X.; Li, N.; Chen, W.; Lin, J. Health condition identification of multi-stage planetary gearboxes using a mrvm-based method. Mech. Syst. Signal Process. 2015, 60–61, 289–300. [Google Scholar] [CrossRef]
- He, S.; Chen, J.; Zhou, Z.; Zi, Y.; Wang, Y.; Wang, X. Multifractal entropy based adaptive multiwavelet construction and its application for mechanical compound-fault diagnosis. Mech. Syst. Signal Process. 2016, 76–77, 742–758. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J.; Zhao, Z.; Wang, R. A Novel Method for Multi-Fault Feature Extraction of a Gearbox under Strong Background Noise. Entropy 2017, 20, 10. [Google Scholar] [CrossRef]
- Jiang, W.L.; Niu, H.F.; Liu, S.Y. Composite fault diagnosis method and its verification experiments. J. Vib. Shock 2011, 30, 176–180. [Google Scholar]
- Wang, P.F.; Jian-Zhong, H.U. Application of envelope spectrum characteristics based on LMD to gearbox fault diagnosis. J. Mech. Electr. Eng. 2016, 5, 7. [Google Scholar]
- Wang, Z.; Wang, J.; Kou, Y.; Zhang, J.; Ning, S.; Zhao, Z. Weak Fault Diagnosis of Wind Turbine Gearboxes Based on MED-LMD. Entropy 2017, 19, 277. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhu, H.; Li, Z. A new compound faults detection method for rolling bearings based on empirical wavelet transform and chaotic oscillator. Chaos Solitons Fractals 2016, 89, 8–19. [Google Scholar] [CrossRef]
- Chen, H.; Chen, P.; Chen, W.; Wu, C.; Liand, J.; Wu, J. Wind Turbine Gearbox Fault Diagnosis Based on Improved EEMD and Hilbert Square Demodulation. Appl. Sci. 2017, 7, 128. [Google Scholar] [CrossRef]
- Yang, F.; Shen, X.; Wang, Z. Multi-Fault Diagnosis of Gearbox Based on Improved Multipoint Optimal Minimum Entropy Deconvolution. Entropy 2018, 20, 611. [Google Scholar] [CrossRef]
- Wang, Z.; Han, Z.; Gu, F.; Gu, J.X.; Ning, S. A novel procedure for diagnosing multiple faults in rotating machinery. ISA Trans. 2015, 55, 208–218. [Google Scholar] [CrossRef] [PubMed]
- Mahgoun, H.; Bekka, R.E.; Felkaoui, A. Gearbox fault diagnosis using ensemble empirical mode, decomposition (EEMD) and residual signal. Mech. Ind. 2012, 13, 33–44. [Google Scholar] [CrossRef]
- Bonizzi, P.; Karel, J.M.H.; Meste, O.; Peeters, R.M. Singular spectrum decomposition: A new method for time series decomposition. Adv. Adapt. Data Anal. 2014, 6, 1–34. [Google Scholar] [CrossRef]
- Movahedifar, M.; Yarmohammadi, M.; Hassani, H. Bicoid signal extraction: Another powerful approach. Math. Biosci. 2018, 303, 52–61. [Google Scholar] [CrossRef] [PubMed]
- Yan, X. Morphological Demodulation Method Based on Improved Singular Spectrum Decomposition and Its Application in Rolling Bearing Fault Diagnosis. J. Mech. Eng. 2017, 53, 104. [Google Scholar] [CrossRef]
- Zhang, Z.; Entezami, M.; Stewart, E.; Roberts, C. Enhanced fault diagnosis of roller bearing elements using a combination of empirical mode decomposition and minimum entropy deconvolution. Arch. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 231. [Google Scholar] [CrossRef]
- Endo, H.; Randall, R.B. Application of a Minimum Entropy Deconvolution Filter to Enhance Autoregressive Model Based Gear Tooth Fault Detection Technique. Mech. Syst. Signal Process. 2007, 21, 906–919. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B.; Endo, H. The Enhancement of Fault Detection and Diagnosis in Rolling Element Bearings Using Minimum Entropy Deconvolution Combined with Spectral Kurtosis. Mech. Syst. Signal Process. 2007, 21, 2616–2633. [Google Scholar] [CrossRef]
- He, D.; Wang, X.; Li, S.; Lin, J.; Zhao, M. Identification of multiple faults in rotating machinery based on minimum entropy deconvolution combined with spectral kurtosis. Mech. Syst. Signal Process. 2016, 81, 235–249. [Google Scholar] [CrossRef]
- Li, J.; Li, M.; Zhang, J. Rolling bearing fault diagnosis based on time-delayed feedback monostable stochastic resonance and adaptive minimum entropy deconvolution. J. Sound Vib. 2017, 401, 139–151. [Google Scholar] [CrossRef]
- Mcdonald, G.L.; Zhao, Q. Multipoint Optimal Minimum Entropy Deconvolution and Convolution Fix: Application to vibration fault detection. Mech. Syst. Signal Process. 2017, 82, 461–477. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo search: Recent advances and applications. Neural Comput. Appl. 2014, 24, 169–174. [Google Scholar] [CrossRef]
- Xuan, H.; Zhang, R.; Shi, S. An Efficient Cuckoo Search Algorithm for System-Level Fault Diagnosis. Chin. J. Electron. 2016, 25, 999–1004. [Google Scholar] [CrossRef]
- Kumar, N.M.; Panda, R. A novel adaptive cuckoo search algorithm for intrinsic discriminant analysis based face recognition. Appl. Soft Comput. 2016, 38, 661–675. [Google Scholar]
- Cheng, J.; Wang, L.; Xiong, Y. An algorithm and its application in vibration fault diagnosis for a hydroelectric generating unit. Eng. Optim. 2018, 50, 1593–1608. [Google Scholar] [CrossRef]
- Durgun, İ.; Yildiz, A.R. Structural Design Optimization of Vehicle Components Using Cuckoo Search Algorithm. Materialprufung 2012, 54, 185–188. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Z.; Miao, Q.; Wang, L. An optimized time varying filtering based empirical mode decomposition method with grey wolf optimizer for machinery fault diagnosis. J. Sound Vib. 2018, 418, 55–78. [Google Scholar] [CrossRef]
- Zeng, D.T.; Zhou, D.J.; Tan, C.Q.; Jiang, B.Y. Research on Model-Based Fault Diagnosis for a Gas Turbine Based on Transient Performance. Appl. Sci. 2018, 8, 148. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J.; Du, W. Research on Fault Diagnosis of Gearbox with Improved Variational Mode Decomposition. Sensors 2018, 10, 3510. [Google Scholar] [CrossRef] [PubMed]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter Length | 10 | 30 | 50 | 70 | 90 |
| Kurtosis | 4.0765 | 5.2952 | 7.7863 | 9.2581 | 10.4318 |
| Component | SSC1 | SSC2 | SSC3 | SSC4 | SSC5 | SSC6 |
|---|---|---|---|---|---|---|
| CC | 0.0452 | 0.2364 | 0.5421 | 0.4327 | 0.3644 | 0.0835 |
| Method | SSD | EEMD | ISSD | MVMD |
|---|---|---|---|---|
| Time/s | 2.14 | 4.39 | 8.53 | 5.68 |
| Rotation Speed | Rotational Frequency | Gear Meshing Frequency | Fault Frequency of Outer Ring |
|---|---|---|---|
| 1200 rpm | 20 Hz | 360 Hz | 160.2 Hz |
| Components | SSC1 | SSC2 | SSC3 | SSC4 | SSC5 | SSC6 | SSC7 | SSC8 |
|---|---|---|---|---|---|---|---|---|
| CC | 0.0678 | 0.1023 | 0.0756 | 0.1432 | 0.3624 | 0.2715 | 0.0125 | 0.0416 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, W.; Zhou, J.; Wang, Z.; Li, R.; Wang, J. Application of Improved Singular Spectrum Decomposition Method for Composite Fault Diagnosis of Gear Boxes. Sensors 2018, 18, 3804. https://doi.org/10.3390/s18113804
Du W, Zhou J, Wang Z, Li R, Wang J. Application of Improved Singular Spectrum Decomposition Method for Composite Fault Diagnosis of Gear Boxes. Sensors. 2018; 18(11):3804. https://doi.org/10.3390/s18113804
Chicago/Turabian StyleDu, Wenhua, Jie Zhou, Zhijian Wang, Ruiqin Li, and Junyuan Wang. 2018. "Application of Improved Singular Spectrum Decomposition Method for Composite Fault Diagnosis of Gear Boxes" Sensors 18, no. 11: 3804. https://doi.org/10.3390/s18113804
APA StyleDu, W., Zhou, J., Wang, Z., Li, R., & Wang, J. (2018). Application of Improved Singular Spectrum Decomposition Method for Composite Fault Diagnosis of Gear Boxes. Sensors, 18(11), 3804. https://doi.org/10.3390/s18113804