Typically, routing systems are based on a graph whose nodes represent street junctions and edges represent street segments. The edges may or may not be directed depending on the mode of transportation and the street’s traffic direction(s). The graph’s edges are associated with weights representing the street segments’ lengths and speed limits. In our proposed system, the weight of each edge
i is a function of different variables
x, each of which represents one of the four factors that might influence a pedestrian’s route choice. As mentioned, presently, these factors are the streets length, greenness, sociability, and quietness. Each variable
x is normalized (notated as
) by dividing each of its values by the maximum value observed at our test-site (see
Section 5). Then,
is multiplied by a user-defined weight
wx ∈ [0,10]. Finally, the four terms,
iwx, are summed into a final overall weight for each street segment
i. As in other routing systems, an algorithm minimizes the summation of the final weights in the graph’s path from the origin to the destination. What is special about this system is that the user is able to define the weights
wx of each factor
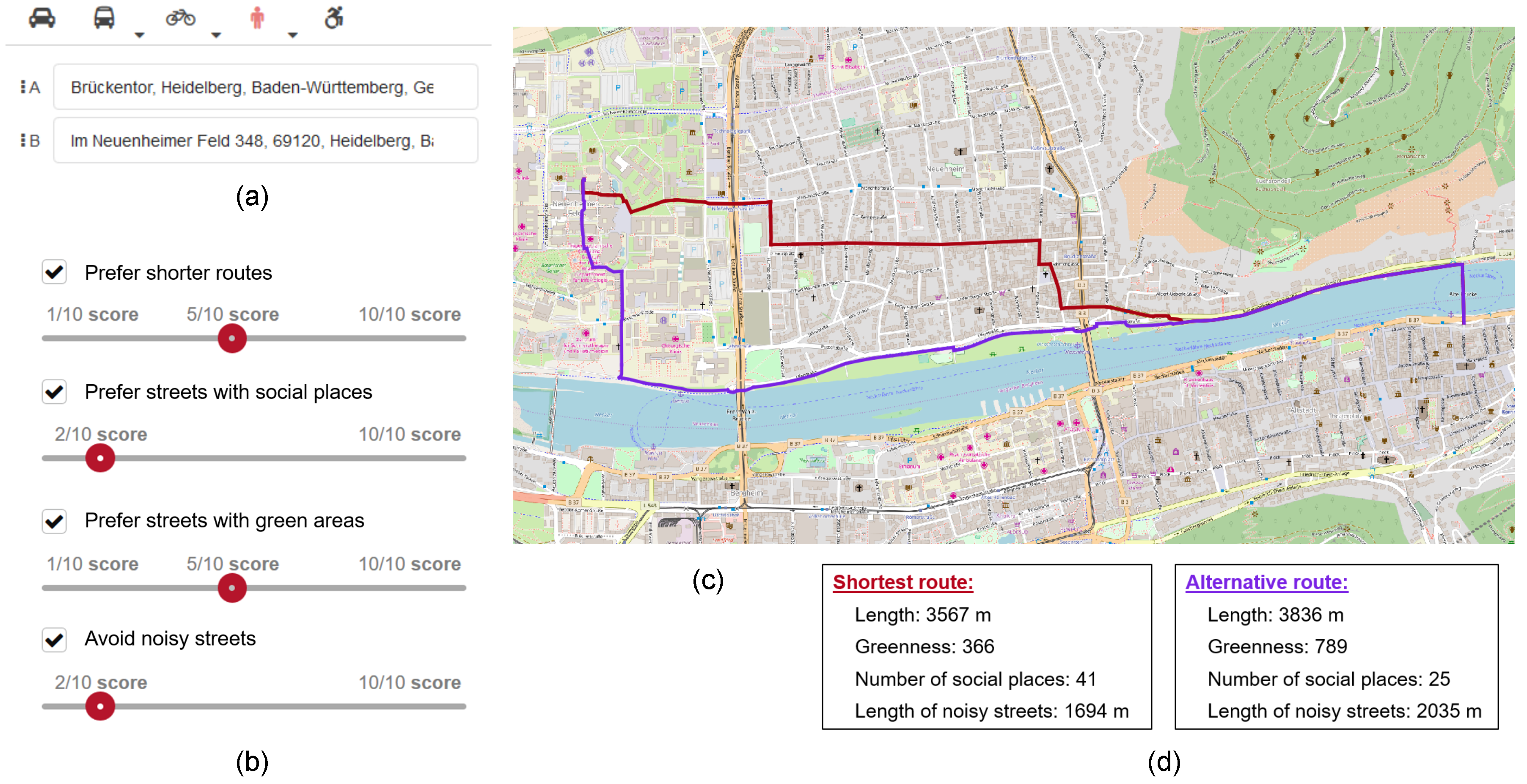
x in a interactive way by moving a slide-bar discretized into 11 levels from 0 to 10. The slide-bar configuration represents the subjective preferences of the user regarding the four factors that the system considers. Users may alter the slide-bar’s configuration for each trip according to their mood and other circumstantial aspects, such as weather conditions, time of day, purpose of the trip, etc.
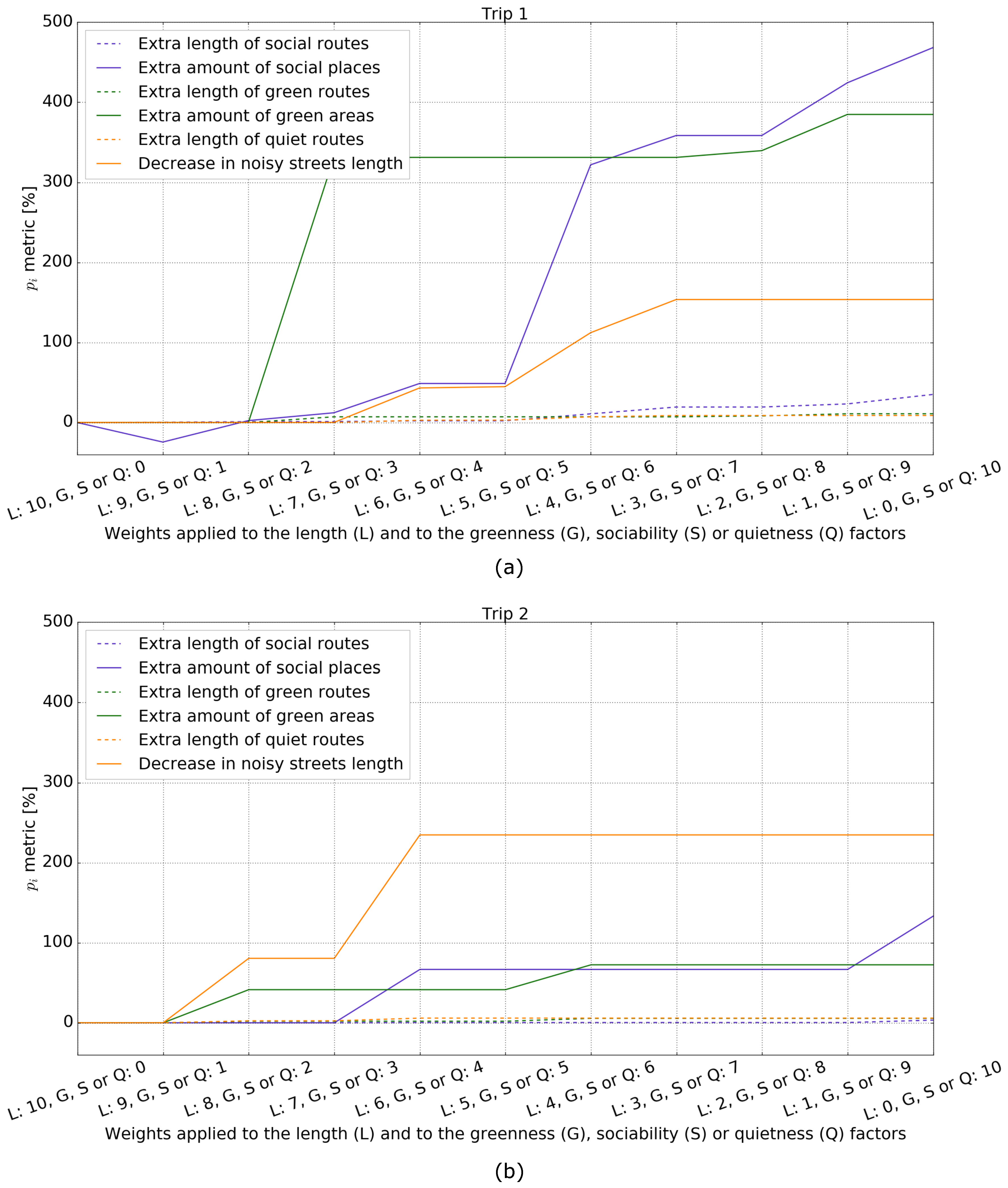
Figure 1 depicts the main interface components of the system. Besides visualizing the shortest and customized routes on the screen, users are able to see a quantitative comparison between the two routes in regard to the four factors. That means they are informed of the extra distance of the customized route (in relation to the shortest route) as well as how much more pleasant it is with respect to the other three factors.
3.1. Why These Factors?
The interactive routing system presented above is able to extract customized pedestrian routes considering the street length, greenness, sociability, and quietness. Below, we briefly discuss why the last three of these four factors were chosen.
Besides promoting outdoor activities like walking, cycling, and doing sports [
30,
31], green areas are known to enhance the feeling of calmness and tranquility, thus having a positive effect on people’s psychological health [
32]. Furthermore, green areas also mitigate the negative effects of heat discomfort as well as air and noise pollution [
33,
34].
Places of social interaction are also associated with physical and mental health benefits among urban dwellers [
35,
36]. The possibility of social interaction is known to be correlated with the number, variety, and attractiveness of leisure and service destinations [
37,
38]. Although the influence of such destinations on pedestrians route choice might be stronger on individuals in recreational situations, Sugiyama et al. [
39] and Cerin et al. [
40] also found consistent associations between the route preferences of pedestrians in utilitarian situations and the presence and proximity of retail and service destinations.
Urban dwellers, and pedestrians specifically, are exposed to noise and air pollution, which negatively affect people’s well-being and may cause different health problems [
41,
42,
43]. Air and noise pollution are strongly correlated because, in urban areas, both are mainly produced by road traffic [
34,
44]. Therefore, our pedestrian routing system gives users the option of preferring roads with less traffic. As mentioned earlier, the extent to which such roads should be avoided is interactively defined by users through a slide-bar.
It is important to emphasize that these factors are frequently interdependent. For example, streets with more road traffic often have more service and leisure destinations. Also, green areas like parks and squares become, at certain times of the day, places of social interaction. The feeling of safety and the aesthetics of built-up structures, two of the factors that also influence pedestrian route choice, are frequently associated with streets with an abundance and variety of services and leisure destinations. The main reason for this is the personalized parts of the streetfronts undertaken by business owners, the feeling of territorial control they transmit, and the permeability of the facades through shop windows are aspects that contribute to the feeling of safety and general perception of cleanness and good maintenance of building facades [
37]. Furthermore, parts of the street personalized by business owners are negatively correlated with the presence of litter, vandalism, and graffiti [
45].
3.2. How the Factors Are Extracted and Integrated
In this section, we explain how the greenness, social, and quietness factors were defined and quantified for each street segment based only on OSM data. We also explain how these factors were then integrated into a routing cost function.
Although the sociability of streets is difficult to measure and is, to a large extent, subjective for each person, streets that promote meetings and interactions with friends, acquaintances, and strangers are known to strongly correlate with the presence of so-called
third places. Third places are places other than the individual’s home or working place [
46]. Different studies have described the sociability of streets and neighbourhoods based on the presence of third places [
37,
38]. In this work, third places were extracted by selecting OSM nodes, ways, and relations containing at least one of the tags (i.e., key = value pairs) presented in
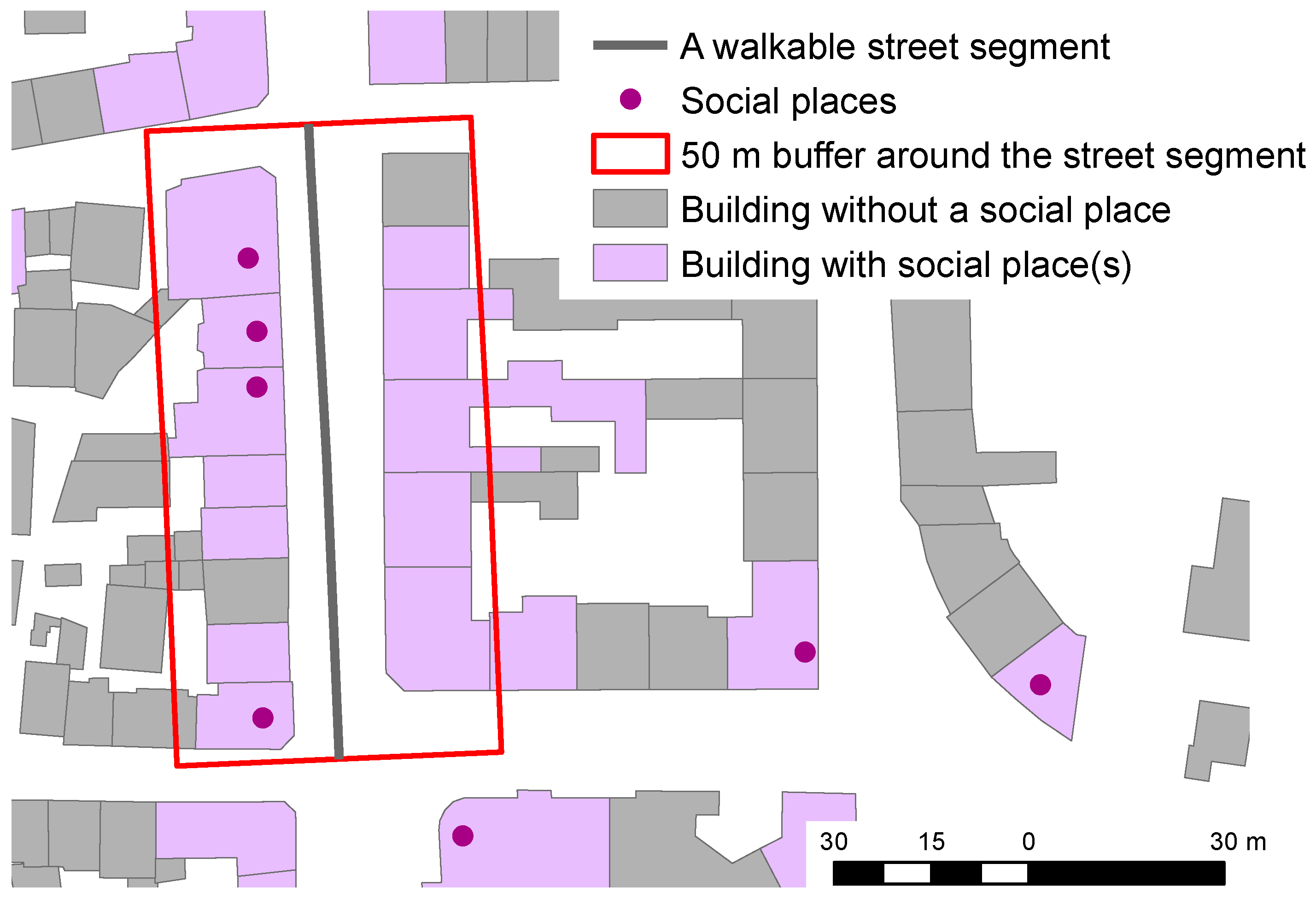
Table 1. The sociability of street segments was computed by firstly defining a 50 m buffer around each street segment and then counting the number of OSM features intersecting this buffer with at least one of the tags listed in
Table 1. This process is graphically depicted in
Figure 2. Finally, the sociability factor was computed for each street segment by dividing its length by the number of third place features intersecting the buffer. Note that the list of OSM tags from
Table 1 can easily be extended and edited without changing the other steps of the algorithm, which can also be applied to describe the cultural, historical, and architectural value of street segments. Aside from considering OSM tags related to those kinds of places instead of to social ones, this factor can be computed with the same processing chain as the one applied to describe the streets’ sociability.
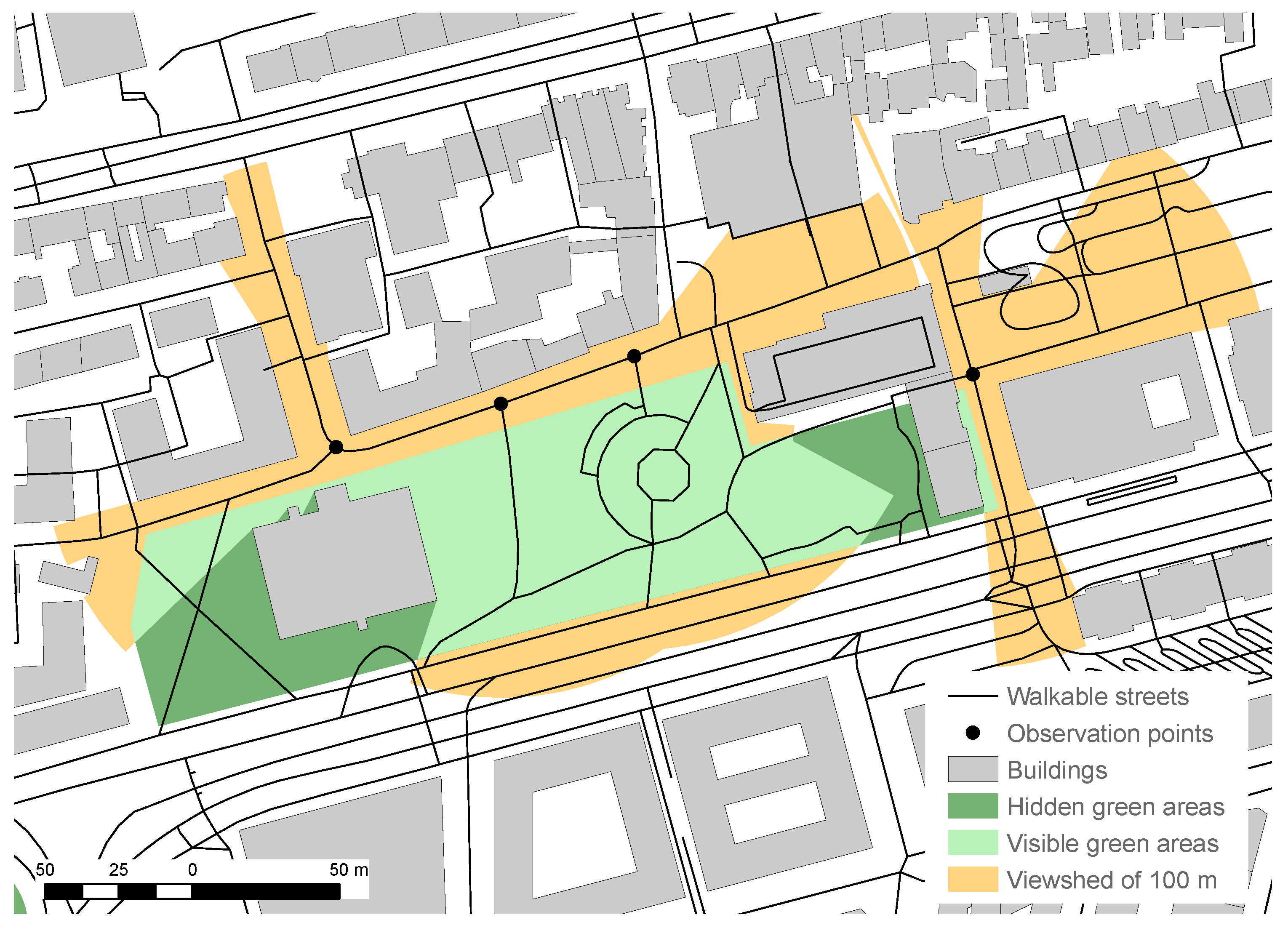
The computation of the greenness of street segments was preceded by the selection of OSM features with at least one of the tags presented in
Table 2 that are considered to indicate green areas. Observation points were then established at the beginning and end of each street segment shorter than 50 m. For longer street segments,
n =
equidistant observation points was established (in practice,
n was rounded to its closest integer). Subsequently, the viewshed in a radius of 100 m was computed for each of these observation points. These viewsheds were merged and the green areas intersecting the merged viewshed were extracted. This process is depicted in
Figure 3. Finally, the relative visible green area inside the merged viewshed was computed. The greenness factor
g of each street segment
i was then given by
The reason for adding 0.5 into the denominator of Equation (
1) was that, without it, street segments with little visible green areas around them would get very high
factor values. This is because dividing any number by a value close to zero leads to the manifold multiplication of that number. The effect would be the extraction of absurdly longer routes that do not make any sense in terms of the number and direction of turns. The addition of 0.5 in the denominator thus sets the constraint that
will be, at maximum, twice the length of the street segment
i. This value was defined empirically during exploratory tests.
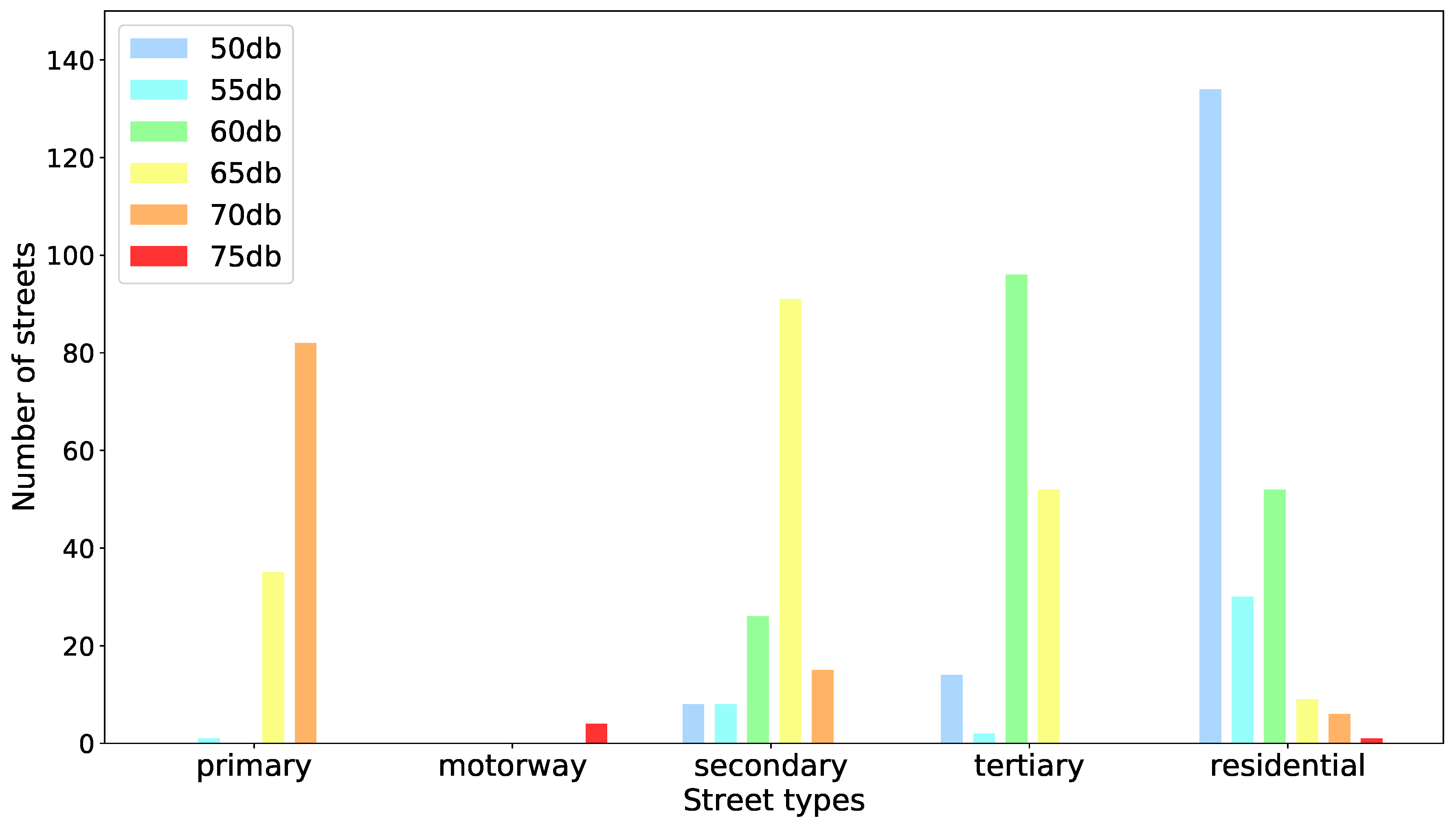
Regarding the quietness factor, the street segments in OSM were grouped into two categories according to their highway/street type tag, namely, ‘noisy’ and ‘less noisy’. As shown in
Table 3, the OSM highway type tags were associated with noise factors of 1 or 2. Following, the quietness factor of each street segment was computed by dividing its length by the noise factor associated with its highway type tag. Although this is a very simplified way to describe the quietness of streets, we took into account that the main source of noise in urban areas is car, truck, and bus traffic [
34]. Furthermore, based on official noise intensity data from the city of Heidelberg (Germany)—the test-site of our system’s prototype—we observed a consistent correlation of higher and lower noise intensity levels with street segments associated with noise factors 1 and 2, respectively.
Figure 4 depicts the distribution of noise intensity levels for each highway type from OSM. Based on a visual analysis of these distributions, noise factors were associated with OSM highway types according to
Table 3.
The cost function based on which the system extracts the pedestrian routes considers the length as well as the sociability, greenness, and quietness factors of the street segments. As explained in
Section 3, each term is normalized and then multiplied by a user-defined weight which is discretized into eleven levels from 0 to 10. The four normalized and weighted factors are then summed. Thus, the final weight
of a street segment
i is given by
where
,
,
, and
are, respectively, the normalized length, greenness, sociability, and quietness of a street segment
i. The terms
,
,
, and
are the respective user-defined factor weights. As mentioned, these weights are set by means of slide-bars available in the system’s interface.
The lengths of the street segments were considered in the computation of the greenness, sociability, and quietness factors, because our intention was that the alternative routes extracted by the system would not be significantly longer than the shortest routes but have significantly less noisy meters as well as more green areas and social places, depending on the user-defined factor weights and the city structure, of course. Thus, we assumed that, most of the time, users of our system will not be willing to make very long detours for the sake of pleasant walking, which is usually the case in more rare situations, like touristing or city exploration. Our assumption is corroborated by the seminal work of Seneviratne et al. [
6] where evidence is given that distance is the strongest factor in pedestrian route choice. A more practical justification is that, even if the length factor has a strong weight, very long and complex routes are obtained if the length is not also considered in the computation of the other factors.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}