An EEG Experimental Study Evaluating the Performance of Texas Instruments ADS1299




Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. EEG Systems
2.2.1. Prototype
2.2.2. Gold Standard
2.2.3. Electrodes
2.3. Experiment Protocol
2.4. Data Processing
EEG Processing
2.5. Performance Measures
2.5.1. EEG Specific Measures
- Power across EEG Bands: Power across four EEG bands (delta [0.05–3 Hz], theta [3–8 Hz], alpha [8–12 Hz], and beta [12–38 Hz]) was obtained separately from each epoch for all the channels using MATLAB bandpower function. The obtained power was converted to decibels (dB) and then averaged across epochs and channels for each band [22].
- Pre-Movement Noise (PMN): The EEG activity from 2–3 s before the sEMG onset was regarded as baseline [36]. The root mean square (RMS) value of the baseline was calculated separately from each epoch for all the channels and then averaged across channels and epochs to obtain pre-movement noise (PMN) [37].
2.5.2. MRCP Specific Measures
- Signal-to-Noise Ratio (SNR): The signal-to-noise ratio was defined as the ratio of peak negative amplitude to the RMS value in the baseline segment of the averaged MRCP, expressed in decibels.
- Amplitude and Time of Negative Peak (PN, PNT): The amplitude of the negative peak in the 1 s before and after the sEMG onset was obtained from the averaged MRCP using a local peak algorithm [38]. The time of the peak negative amplitude was expressed in milliseconds, where a negative value represents occurrence before, and a positive value after, the sEMG onset. The peak negative value is one of the most important features of the MRCP as it has been widely studied in relation with rehabilitation and motor learning [39,40].
2.6. Statistical Analysis
3. Results
3.1. Data Loss and Artefacts
3.2. Rejection of Channels, ICA Components, and Epochs
3.3. EEG Specific Measures
3.3.1. Power Across EEG Bands
3.3.2. Pre-Movement Noise
3.4. MRCP Specific Measures
3.4.1. Signal-to-Noise Ratio
3.4.2. Amplitude and Time of the Negative Peak
3.5. Cosine Similarity
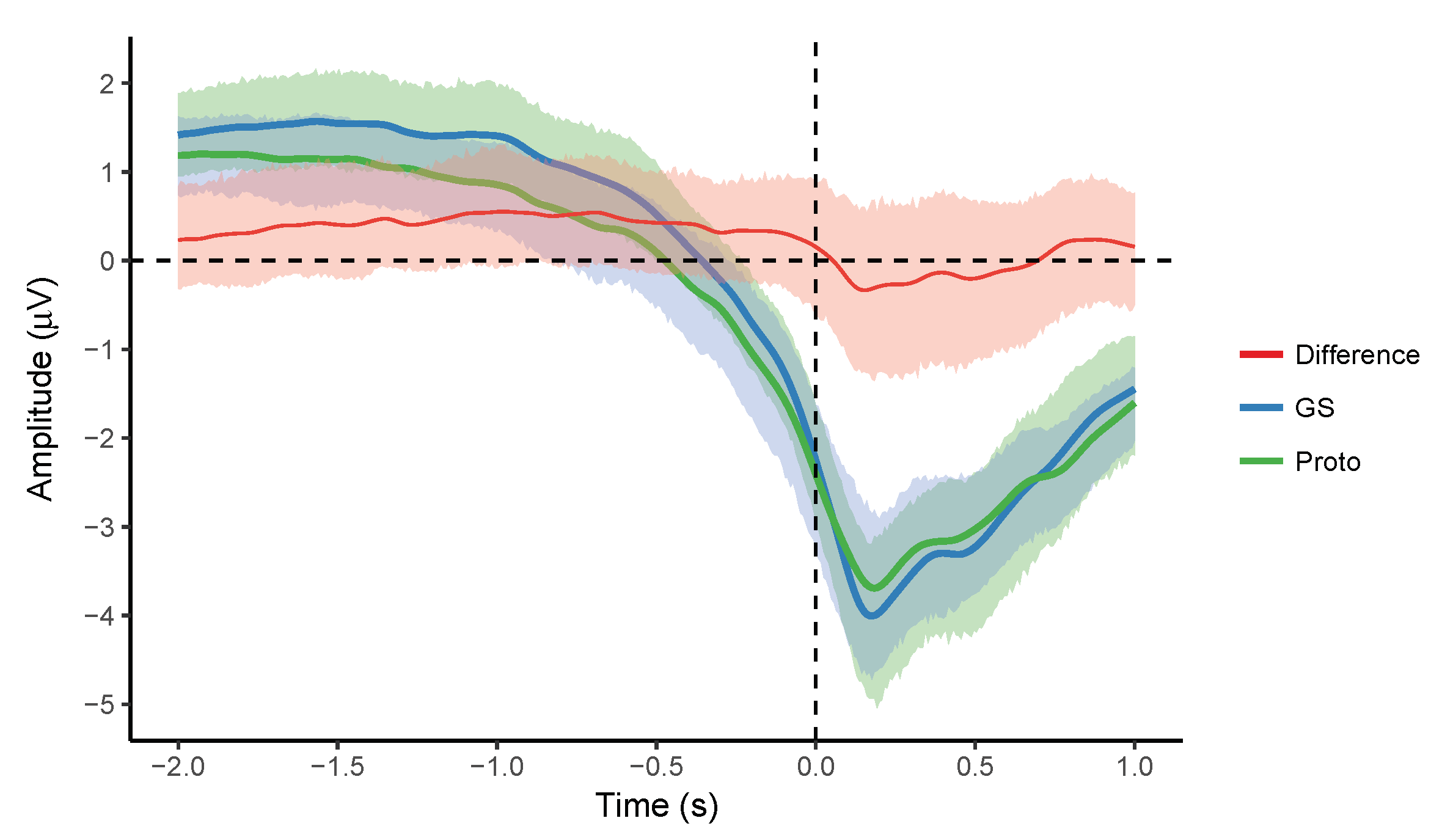
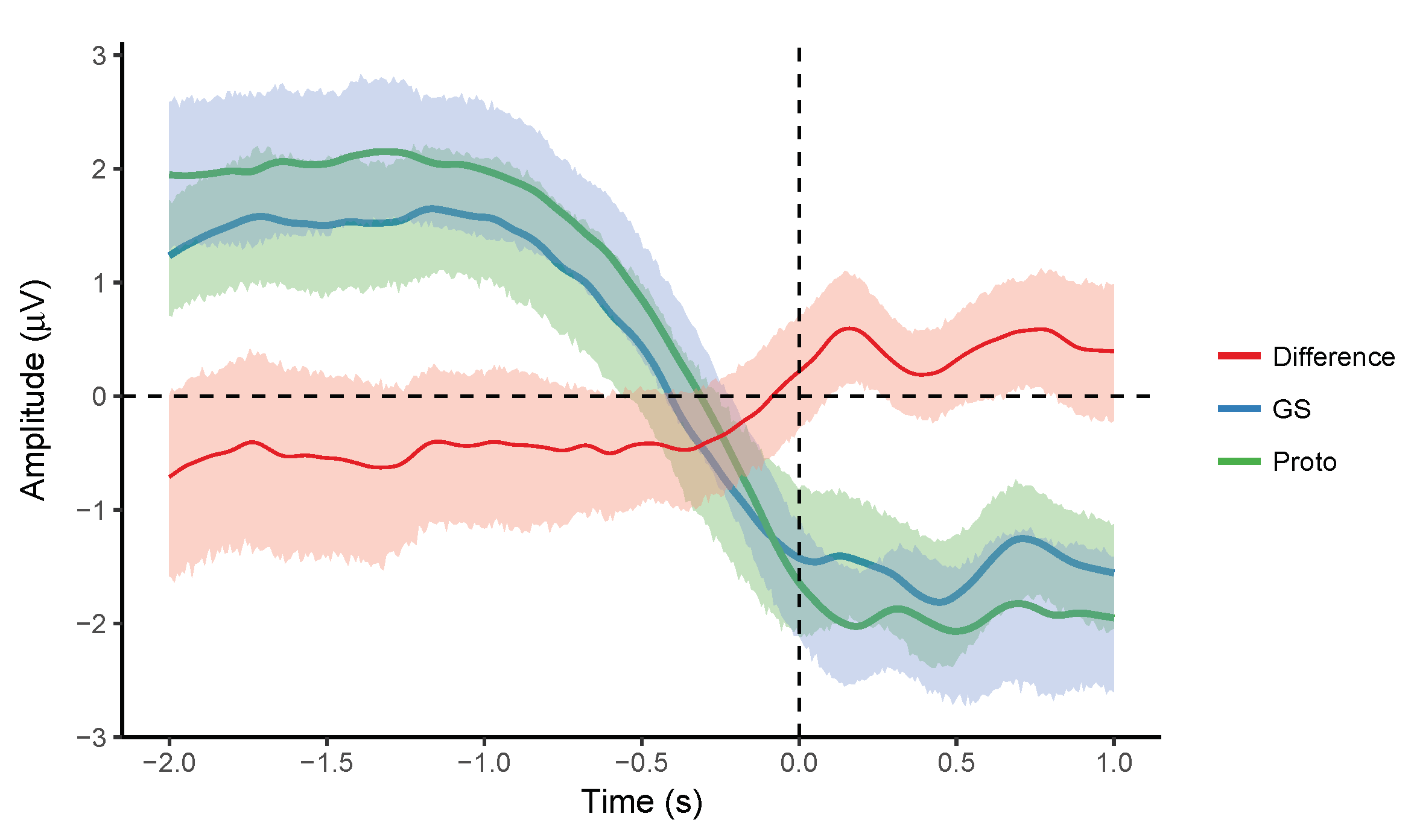
3.6. Grand Average of Participant MRCPs
3.7. Topographic Maps
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BCI | Brain computer interface |
| dB | Decibels |
| EEG | Electroencephalography |
| GS | Gold standard system based on Compumedics Neuroscan NuAmps |
| ICA | Independent component analysis |
| MRCPs | Movement-related cortical potentials |
| ms | Milli-seconds |
| Proto | The prototype system based on Texas Instruments ADS1299 and OpenBCI Cyton Board V3-32 |
| PN | Peak negative value in an MRCP |
| PNT | Time of PN value |
| PMN | Pre-movement noise measured as RMS value |
| RMS | Root mean square value |
| r | Cosine similarity |
| SNR | Signal-to-noise ratio |
| sEMG | Surface electromyography |
| S/D | Participant wise ratio of power values in step on/off to those in dorsiflexion |
| μV, uV | Micro-volts |
| μVrms, uVrms | Micro-volts measured as RMS value |
Appendix A


References
- Instruments, T. Low-Noise, 8-Channel, 24-Bit Analog Front-End for Biopotential Measurements ADS1299; ADS1299 Datasheet; Texas Instruments Inc.: Dallas, TX, USA, 2012. [Google Scholar]
- Krachunov, S.; Casson, A.J. 3D printed dry EEG electrodes. Sensors 2016, 16, 1635. [Google Scholar] [CrossRef] [PubMed]
- Guerrero, F.N.; Spinelli, E.M. A Two-Wired Ultra-High Input Impedance Active Electrode. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 437–445. [Google Scholar] [CrossRef] [PubMed]
- Nathan, V.; Jafari, R. Design principles and dynamic front end reconfiguration for low noise EEG acquisition with finger based dry electrodes. IEEE Trans. Biomed. Circuits Syst. 2015, 9, 631–640. [Google Scholar] [CrossRef] [PubMed]
- Zou, Y.; Nathan, V.; Jafari, R. Automatic identification of artifact-related independent components for artifact removal in EEG recordings. IEEE J. Biomed. Health Inf. 2016, 20, 73–81. [Google Scholar] [CrossRef] [PubMed]
- Qian, X.; Chen, Y.; Feng, Y.; Ma, B.; Hao, H.; Li, L. A method for removal of deep brain stimulation artifact from local field potentials. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 2217–2226. [Google Scholar] [CrossRef] [PubMed]
- Kaongoen, N.; Yu, M.; Jo, S. Two-Factor Authentication System Using P300 Response to a Sequence of Human Photographs. IEEE Trans. Syst. Man Cybern. Syst. 2017. [Google Scholar] [CrossRef]
- Beauchene, C.; Abaid, N.; Moran, R.; Diana, R.A.; Leonessa, A. The effect of binaural beats on visuospatial working memory and cortical connectivity. PLoS ONE 2016, 11, e0166630. [Google Scholar] [CrossRef] [PubMed]
- Jindal, U.; Sood, M.; Dutta, A.; Chowdhury, S.R. Development of point of care testing device for neurovascular coupling from simultaneous recording of EEG and NIRS during anodal transcranial direct current stimulation. IEEE J. Transl. Eng. Health Med. 2015, 3, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Zhao, D.; Wang, X.; Hou, X. A SSVEP Stimuli Encoding Method Using Trinary Frequency-Shift Keying Encoded SSVEP (TFSK-SSVEP). Front. Hum. Neurosci. 2017, 11, 278. [Google Scholar] [CrossRef] [PubMed]
- Ssentongo, P.; Robuccio, A.E.; Thuku, G.; Sim, D.G.; Nabi, A.; Bahari, F.; Shanmugasundaram, B.; Billard, M.W.; Geronimo, A.; Short, K.W. A Murine Model to Study Epilepsy and SUDEP Induced by Malaria Infection. Sci. Rep. 2017, 7, 43652. [Google Scholar] [CrossRef] [PubMed]
- Kranczioch, C.; Zich, C.; Schierholz, I.; Sterr, A. Mobile EEG and its potential to promote the theory and application of imagery-based motor rehabilitation. Int. J. Psychophysiol. 2014, 91, 10–15. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain–computer interfaces for communication and control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef]
- Lalor, E.C.; Kelly, S.P.; Finucane, C.; Burke, R.; Smith, R.; Reilly, R.B.; Mcdarby, G. Steady-state VEP-based brain-computer interface control in an immersive 3D gaming environment. EURASIP J. Adv. Signal Process. 2005, 2005, 706906. [Google Scholar] [CrossRef]
- Uktveris, T.; Jusas, V. Development of a Modular Board for EEG Signal Acquisition. Sensors 2018, 18, 2140. [Google Scholar] [CrossRef] [PubMed]
- Dang, X.; Kang, B.; Liu, X.; Cui, G. An Interactive Care System Based on a Depth Image and EEG for Aged Patients with Dementia. J. Healthc. Eng. 2017, 2017. [Google Scholar] [CrossRef] [PubMed]
- Von Lühmann, A.; Wabnitz, H.; Sander, T.; Müller, K.R. M3BA: A mobile, modular, multimodal biosignal acquisition architecture for miniaturized EEG-NIRS-based hybrid BCI and monitoring. IEEE Trans. Biomed. Eng. 2017, 64, 1199–1210. [Google Scholar] [CrossRef] [PubMed]
- Mora, N.; De Munari, I.; Ciampolini, P.; Millán, J.D.R. Plug&Play Brain–Computer Interfaces for effective Active and Assisted Living control. Med. Biol. Eng. Comput. 2017, 55, 1339–1352. [Google Scholar] [CrossRef] [PubMed]
- Kaongoen, N.; Jo, S. A novel hybrid auditory BCI paradigm combining ASSR and P300. J. Neurosci. Methods 2017, 279, 44–51. [Google Scholar] [CrossRef] [PubMed]
- Belwafi, K.; Romain, O.; Gannouni, S.; Ghaffari, F.; Djemal, R.; Ouni, B. An embedded implementation based on adaptive filter bank for brain-computer interface systems. J. Neurosci. Methods 2018. [Google Scholar] [CrossRef] [PubMed]
- Jukiewicz, M.; Cysewska-Sobusiak, A. Stimuli design for SSVEP-based brain computer-interface. Int. J. Electron. Telecommun. 2016, 62, 109–113. [Google Scholar] [CrossRef]
- Oliveira, A.S.; Schlink, B.R.; Hairston, W.D.; König, P.; Ferris, D.P. Proposing metrics for benchmarking novel EEG technologies towards real-world measurements. Front. Hum. Neurosci. 2016, 10, 188. [Google Scholar] [CrossRef] [PubMed]
- Radüntz, T. Signal Quality Evaluation of Emerging EEG Devices. Front. Physiol. 2018, 9, 98. [Google Scholar] [CrossRef] [PubMed]
- Ries, A.J.; Touryan, J.; Vettel, J.; McDowell, K.; Hairston, W.D. A comparison of electroencephalography signals acquired from conventional and mobile systems. J. Neurosci. Neuroeng. 2014, 3, 10–20. [Google Scholar] [CrossRef]
- Cravo, A.M.; Rohenkohl, G.; Wyart, V.; Nobre, A.C. Endogenous modulation of low frequency oscillations by temporal expectations. J. Neurophysiol. 2011, 106, 2964–2972. [Google Scholar] [CrossRef] [PubMed]
- Do Nascimento, O.F.; Nielsen, K.D.; Voigt, M. Relationship between plantar-flexor torque generation and the magnitude of the movement-related potentials. Exp. Brain Res. 2005, 160, 154–165. [Google Scholar] [CrossRef] [PubMed]
- Gu, Y.; Dremstrup, K.; Farina, D. Single-trial discrimination of type and speed of wrist movements from EEG recordings. Clin. Neurophysiol. 2009, 120, 1596–1600. [Google Scholar] [CrossRef] [PubMed]
- Niazi, I.K.; Jiang, N.; Tiberghien, O.; Nielsen, J.F.; Dremstrup, K.; Farina, D. Detection of movement intention from single-trial movement-related cortical potentials. J. Neural Eng. 2011, 8, 066009. [Google Scholar] [CrossRef] [PubMed]
- Van Deursen, J.; Vuurman, E.; Smits, L.; Verhey, F.; Riedel, W. Response speed, contingent negative variation and P300 in Alzheimer’s disease and MCI. Brain Cogn. 2009, 69, 592–599. [Google Scholar] [CrossRef] [PubMed]
- Delorme, A.; Makeig, S. EEGLAB: An open source toolbox for analysis of single-trial EEG dynamics including independent component analysis. J. Neurosci. Methods 2004, 134, 9–21. [Google Scholar] [CrossRef] [PubMed]
- Bonato, P.; D’Alessio, T.; Knaflitz, M. A statistical method for the measurement of muscle activation intervals from surface myoelectric signal during gait. IEEE Trans. Biomed. Eng. 1998, 45, 287–299. [Google Scholar] [CrossRef] [PubMed]
- Ives, J.C.; Wigglesworth, J.K. Sampling rate effects on surface EMG timing and amplitude measures. Clin. Biomech. 2003, 18, 543–552. [Google Scholar] [CrossRef]
- Van Boxtel, G.; Geraats, L.; Van Den Berg-Lenssen, M.; Brunia, C. Detection of EMG onset in ERP research. Psychophysiology 1993, 30, 405–412. [Google Scholar] [CrossRef] [PubMed]
- Makeig, S.; Bell, A.J.; Jung, T.P.; Sejnowski, T.J. Independent component analysis of electroencephalographic data. In Proceedings of the 8th International Conference on Neural Information Processing Systems, Cambridge, MA, USA, 27 November–2 December 1995; pp. 145–151. [Google Scholar]
- McFarland, D.J.; McCane, L.M.; David, S.V.; Wolpaw, J.R. Spatial filter selection for EEG-based communication. Electroencephalogr. Clin. Neurophysiol. 1997, 103, 386–394. [Google Scholar] [CrossRef]
- Shibasaki, H.; Hallett, M. What is the Bereitschaftspotential? Clin. Neurophysiol. 2006, 117, 2341–2356. [Google Scholar] [CrossRef] [PubMed]
- De Vos, M.; Gandras, K.; Debener, S. Towards a truly mobile auditory brain–computer interface: Exploring the P300 to take away. Int. J. Psychophysiol. 2014, 91, 46–53. [Google Scholar] [CrossRef] [PubMed]
- Luck, S.J. An Introduction to the Event-Related Potential Technique; MIT Press: Cambridge, MA, USA, 2014; Volume 1, pp. 110–115. [Google Scholar] [CrossRef]
- Jochumsen, M.; Christensen, C.R.; Christensen, H.R.; Cremoux, S.; Signal, N.; Allen, K.; Taylor, D.; Niazi, I.K. Quantification of movement-related EEG correlates associated with motor training. Front. Hum. Neurosci. 2017, 11. [Google Scholar] [CrossRef] [PubMed]
- Mrachacz-Kersting, N.; Kristensen, S.R.; Niazi, I.K.; Farina, D. Precise temporal association between cortical potentials evoked by motor imagination and afference induces cortical plasticity. J. Physiol. 2012, 590, 1669–1682. [Google Scholar] [CrossRef] [PubMed]
- Winter, B. Linear models and linear mixed effects models in R with linguistic applications. arXiv, 2013; 1, 7–18arXiv:1308.5499. [Google Scholar]
- Bates, D.; Mächler, M.; Bolker, B.; Walker, S. Fitting Linear Mixed-Effects Models Using lme4. J. Stat. Softw. 2015, 67, 1–48. [Google Scholar] [CrossRef]
- Fox, J.; Weisberg, S. An R Companion to Applied Regression, 2nd ed.; Sage: Thousand Oaks, CA, USA, 2011. [Google Scholar]
- Lenth, R.V. Least-Squares Means: The R Package lsmeans. J. Stat. Softw. 2016, 69, 1–33. [Google Scholar] [CrossRef]
- Lakens, D. Calculating and reporting effect sizes to facilitate cumulative science: A practical primer for t-tests and ANOVAs. Front. Psychol. 2013, 4, 863. [Google Scholar] [CrossRef] [PubMed]
- Dehak, N.; Dehak, R.; Glass, J.R.; Reynolds, D.A.; Kenny, P. Cosine similarity scoring without score normalization techniques. In Proceedings of the Odyssey 2010: The Speaker and Language Recognition Workshop, Brno, Czech Republic, 28 June–1 July 2010. [Google Scholar]
- Kamavuako, E.N.; Jochumsen, M.; Niazi, I.K.; Dremstrup, K. Comparison of features for movement prediction from single-trial movement-related cortical potentials in healthy subjects and stroke patients. Comput. Intell. Neurosci. 2015, 2015, 71. [Google Scholar] [CrossRef] [PubMed]
- Ramos-Murguialday, A.; Birbaumer, N. Brain oscillatory signatures of motor tasks. J. Neurophysiol. 2015, 113, 3663–3682. [Google Scholar] [CrossRef] [PubMed]
- Trammell, J.P.; MacRae, P.G.; Davis, G.; Bergstedt, D.; Anderson, A.E. The Relationship of Cognitive Performance and the Theta-Alpha Power Ratio Is Age-Dependent: An EEG Study of Short Term Memory and Reasoning during Task and Resting-State in Healthy Young and Old Adults. Front. Aging Neurosci. 2017, 9, 364. [Google Scholar] [CrossRef] [PubMed]
- Symeonidou, E.R.; Nordin, A.D.; Hairston, W.D.; Ferris, D.P. Effects of Cable Sway, Electrode Surface Area, and Electrode Mass on Electroencephalography Signal Quality during Motion. Sensors 2018, 18, 1073. [Google Scholar] [CrossRef] [PubMed]
- Mihajlović, V.; Patki, S.; Grundlehner, B. The impact of head movements on EEG and contact impedance: An adaptive filtering solution for motion artifact reduction. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 5064–5067. [Google Scholar] [CrossRef]
- O’Regan, S.; Faul, S.; Marnane, W. Automatic detection of EEG artefacts arising from head movements using EEG and gyroscope signals. Med. Eng. Phys. 2013, 35, 867–874. [Google Scholar] [CrossRef] [PubMed]
- Niazi, I.K.; Mrachacz-Kersting, N.; Jiang, N.; Dremstrup, K.; Farina, D. Peripheral electrical stimulation triggered by self-paced detection of motor intention enhances motor evoked potentials. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 595–604. [Google Scholar] [CrossRef] [PubMed]
- Xu, R.; Jiang, N.; Dosen, S.; Lin, C.; Mrachacz-Kersting, N.; Dremstrup, K.; Farina, D. Endogenous sensory discrimination and selection by a fast brain switch for a high transfer rate brain-computer interface. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 901–910. [Google Scholar] [CrossRef] [PubMed]
- Sburlea, A.I.; Montesano, L.; de la Cuerda, R.C.; Diego, I.M.A.; Miangolarra-Page, J.C.; Minguez, J. Detecting intention to walk in stroke patients from pre-movement EEG correlates. J. Neuroeng. Rehabil. 2015, 12, 113. [Google Scholar] [CrossRef] [PubMed]
- Bulea, T.C.; Prasad, S.; Kilicarslan, A.; Contreras-Vidal, J.L. Sitting and standing intention can be decoded from scalp EEG recorded prior to movement execution. Front. Neurosci. 2014, 8, 376. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task | System | Rejection at 75 μVpp (%) | Rejection at 125 μVpp (%) |
|---|---|---|---|
| Dorsiflexion | GS | 31.9 ± 26.4 | 6.1 ± 7.0 |
| Proto | 34.7 ± 31.7 | 7.6 ± 20.9 | |
| Step on/off | GS | 52.5 ± 35.6 | 5.7 ± 6.2 |
| Proto | 43.6 ± 34.1 | 4.9 ± 4.0 |
| Task | System | Delta (dB) | Theta (dB) | Alpha (dB) | Beta (dB) |
|---|---|---|---|---|---|
| Dorsiflexion | GS | 17.2 ± 1.4 | 9.4 ± 1.9 | 8.4 ± 3.5 | 10.5 ± 2.6 |
| Proto | 17.9 ± 2.2 | 9.3 ± 2.4 | 8.5 ± 3.3 | 10.0 ± 2.8 | |
| Step on/off | GS | 18.0 ± 1.8 | 9.9 ± 1.9 | 9.3 ± 4.4 | 11.3 ±2.5 |
| Proto | 18.5 ± 2.0 | 9.9 ± 2.1 | 9.4 ± 3.4 | 11.3 ±2.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rashid, U.; Niazi, I.K.; Signal, N.; Taylor, D. An EEG Experimental Study Evaluating the Performance of Texas Instruments ADS1299. Sensors 2018, 18, 3721. https://doi.org/10.3390/s18113721
Rashid U, Niazi IK, Signal N, Taylor D. An EEG Experimental Study Evaluating the Performance of Texas Instruments ADS1299. Sensors. 2018; 18(11):3721. https://doi.org/10.3390/s18113721
Chicago/Turabian StyleRashid, Usman, Imran Khan Niazi, Nada Signal, and Denise Taylor. 2018. "An EEG Experimental Study Evaluating the Performance of Texas Instruments ADS1299" Sensors 18, no. 11: 3721. https://doi.org/10.3390/s18113721
APA StyleRashid, U., Niazi, I. K., Signal, N., & Taylor, D. (2018). An EEG Experimental Study Evaluating the Performance of Texas Instruments ADS1299. Sensors, 18(11), 3721. https://doi.org/10.3390/s18113721