1. Introduction
The rapid escalation of the population in urban spaces accompanied by increasing demands for mobility in cities [
1], leads to substantial challenges in city planning. Increasing demands on mobility lead to growing traffic on the road, inducing suffering for citizens concerning the reduction of travel efficiency, increase in fuel consumption and health hazards from air and noise pollution caused by vehicles. In addition to being a significant source of air pollution in cities, road traffic exposes a large number of people to high daytime noise levels [
2,
3]. Road traffic also leads to anthropogenic heat that together with reradiation effects from urban spaces can increase urban space temperature, resulting in urban heat islands (UHI) [
4]. Hence, it is of great importance to monitor the complex interplay of the road network and traffic conditions for better of sensing Quality of Life (QoL) in future smart cities.
Road traffic is one of the major sources of air pollution in cities [
5]. It is a significant anthropogenic source of
[
6], particulate matter (PM) and other harmful pollutants which impact human health [
5]. Exposure to road traffic induced air pollution can lead to various health impairment for the current as well as the future generation. Multiple studies demonstrated the association of traffic generated air pollution to different heart-related disease in adults as well as for pregnant women [
7,
8]. Traffic data is one of the critical input variables for air pollution modelling approaches [
9,
10].
For many years, various approaches have been devised to monitor air pollution at a higher resolution in the city [
10]. High-resolution monitoring approaches require input parameters also at a higher resolution. However, most studies used traffic models and simulation to represent traffic data because the traffic monitoring datasets are usually available for a very limited number of roads in the cities, hence limiting the possibilities to model air pollution at higher resolution in the city.
Traffic data collection was traditionally performed by using manual processes or with the application of inductive loops at certain locations [
11]. The inductive loops for traffic monitoring became standards in many jurisdictions and are widely used till date [
12]. Various other conventional traffic monitoring approaches include passive infrared devices, Doppler and radar microwave sensors, acoustic detectors, magnetic strips, Piezoelectric sensors, Pneumatic road tube counting devices and video vehicle detection. However, these approaches inherit certain limitations (notably installation and maintenance costs) making them hard to deploy for detailed data collection with better spatial coverage in cities.
The vision of "smart cities" was proposed to address particular problems caused by urbanisation and to promote sustainable urban development in cities. This vision relies on the efficient application of information and communication technology (ICT) for sensing, analysing, integrating critical information which can support efficient operation and development of cities. Improved traffic control was identified in [
13] as one of the possible benefits of advanced sensing in smart cities. Taking into account the emergence and rapid growth of the Internet of Things (IoT) and analytical tools, future cities may be able to enhance the execution and connectivity of urban services, reduce costs and operate on better resource management. The recent advancements in microelectronics, telecommunications and data analysis domains have led to the growing adoption of smart devices. With the application of these smart devices, it is possible to overcome detailed traffic data collection challenges. Extending the deployment of the low-cost IoT devices in a distributed model like crowdsourcing can support well-spread data collection in cities. Altogether, the recent developments in low-cost hardware and support from the crowd can help gather data, which can support transport planning and urban health risk assessment for cities.
The benefit of involving citizens for crowdsourcing traffic data is the ability to provide real-time information about traffic; better situation awareness especially in areas where official traffic monitoring systems are not installed (e.g., rural areas and residential areas); and better spatial coverage. For cities administrations which are not purchasing the data from various commercial third-party traffic data providers (such as TomTom, or HERE), crowdsourcing traffic data can be a useful and low-cost data source. In general (and as indicated by Degbelo et al. [
14]), without engaging citizens in the creation and sharing of data for the provision city services, a city may only be halfway open and smart. Providing means which lower participation barriers to citizens (e.g., low cost sensors) is thus critical to citizen empowerment in future smart cities.
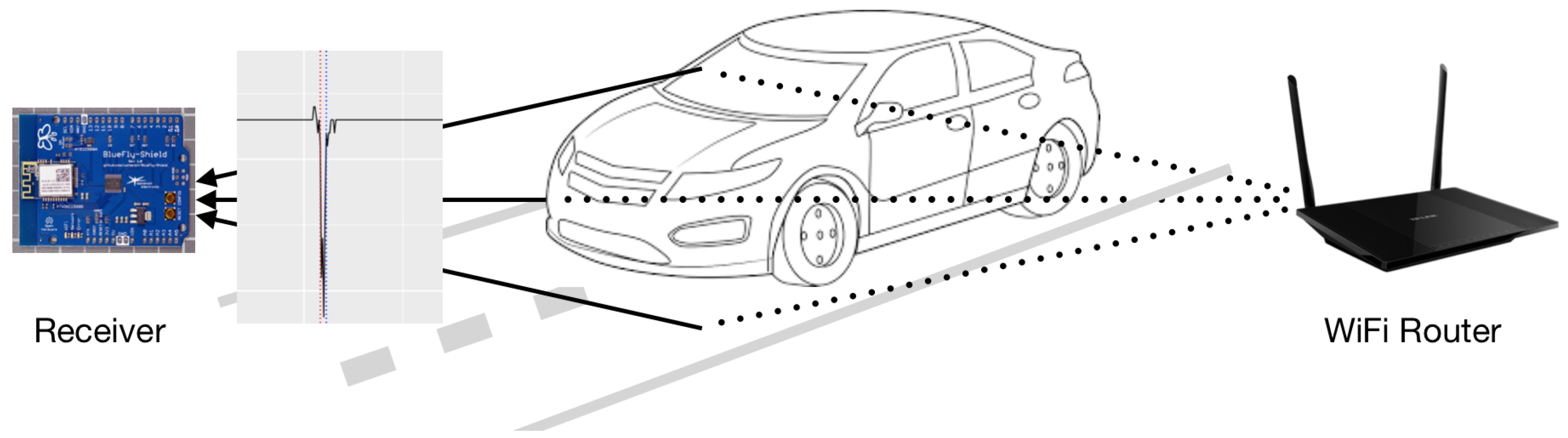
In this paper, we present a novel system based on open-source hardware that has the potential to benefit traffic monitoring technologies because of its low-cost, privacy-preserving, ease of application and potential to large-scale deployment. Because the system is low-cost (less than
$50), it can be used to involve citizens in WiFi-based traffic data crowdsourcing projects, and this way expand traffic data collection to streets currently not covered by conventional traffic monitoring techniques.
Section 2 briefly discusses previous work done related to the topic.
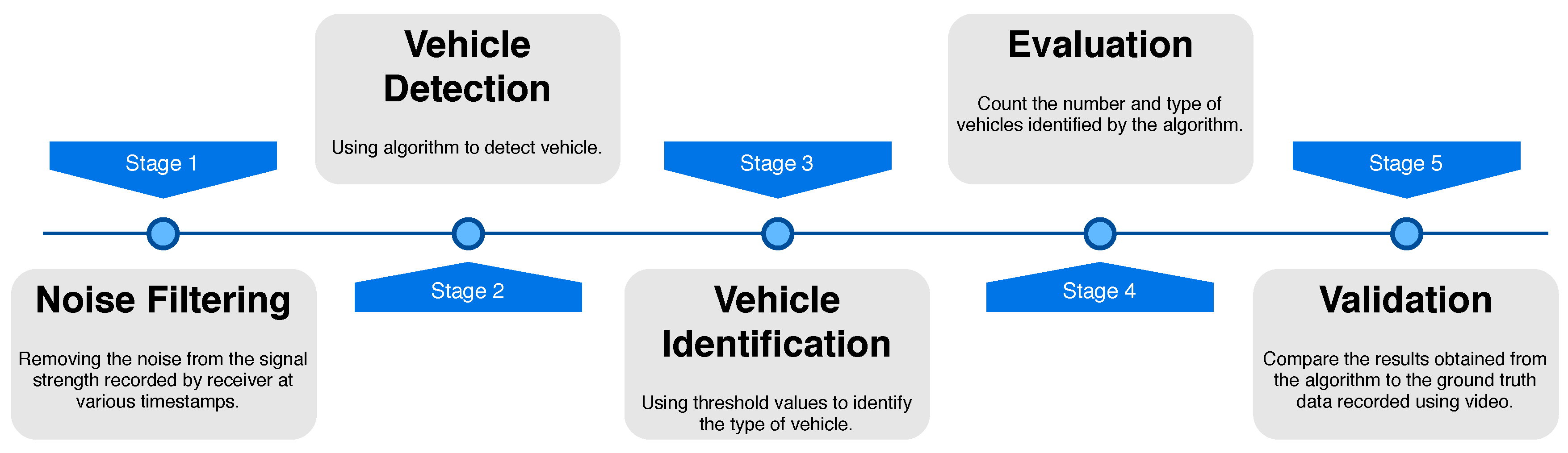
Section 3 describes technologies and the sensor used for the traffic monitoring and presents the algorithm used to infer the results from the proposed system. In
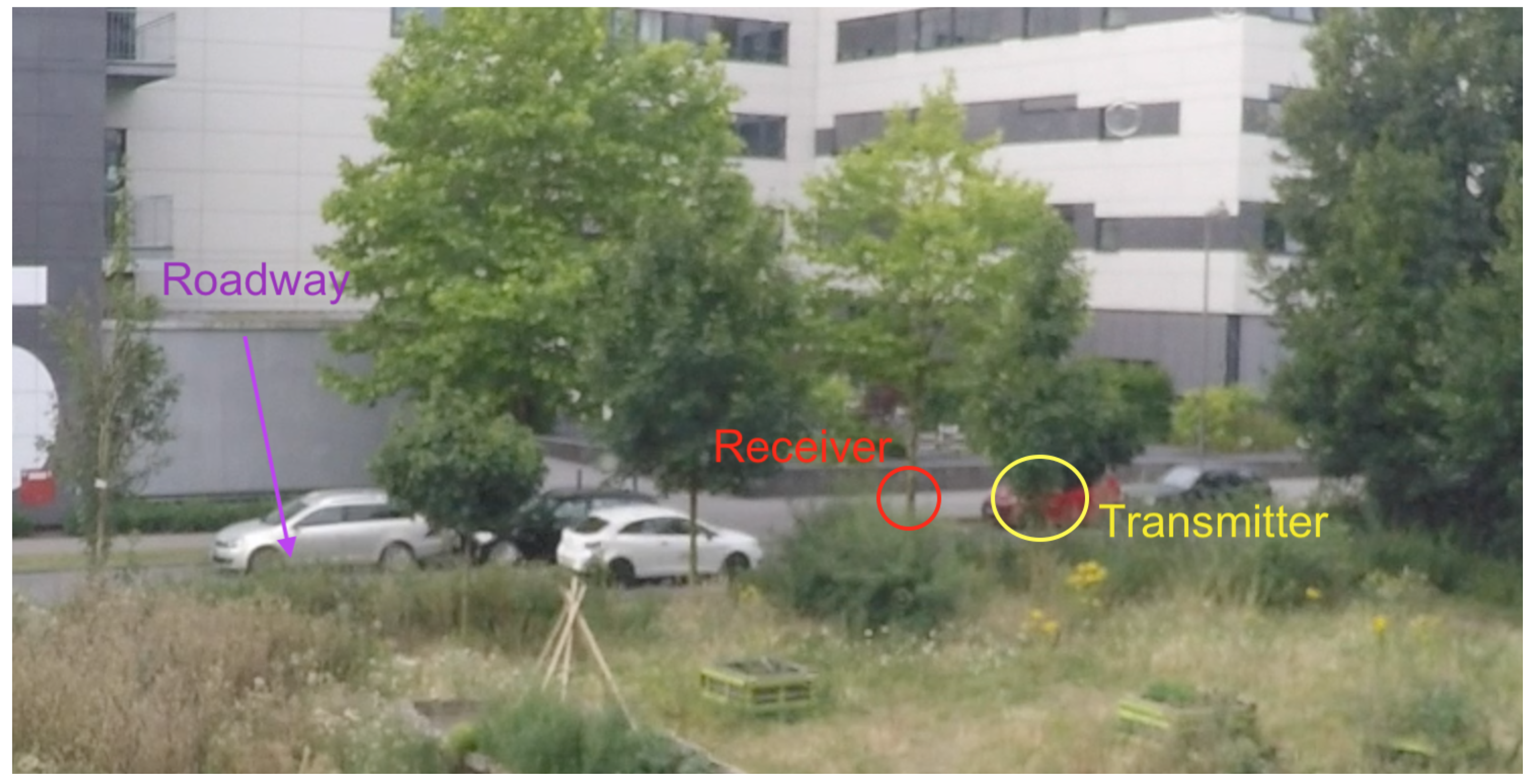
Section 4, we present the results we obtained concerning the performance of the proposed system in the real world, using two different scenarios.
Section 5 discusses the results we obtained, as well as the applications and limitations of the proposed system.
Section 6 and
Section 7 present the future work and conclude the work respectively.
5. Discussion
This study has explored the potential of using low-cost open hardware for WiFi-based vehicle count. Given existing initiatives to increase free WiFi hotspots in cities (e.g., European Commission [
45]), there is a need for techniques which take advantage of WiFi availability for traffic monitoring purposes. The advantage of low-cost sensors over expensive, highly performant sensors is that they can be bought by a large number of citizens. As a result, they can be deployed on any road of the city, enabling data collection about traffic at places currently uncovered by official traffic monitoring techniques. It can be inferred from the results that the proposed system is capable of identifying certain types of vehicles on the road with great reliability. The classification accuracy on the low traffic road suggests the ability of the system to identify objects like bicycles and cars with higher accuracy. However, the ability of the system to detect a comparatively small object such as bicycles for the busy roads (Scenario 2) is low but can characterise cars and trucks with high accuracy. That is, the proposed system is useful for collecting data about cars and trucks in the residential areas, where traffic data is not generally collected.
Looking at
Table 6 and
Table 7, one can conclude that the system
can be used to count vehicles, as can be inferred from the values for precision/recall after taking into account the machine learning method. However, due care must be exercised in interpreting the kNN based results as the findings are in a preliminary stage and were investigated to comprehend the potential of machine learning methods with the proposed low-cost hardware device. Counting based on RSSI and time window alone is not very efficient, as one can conclude from the recall values (roughly around 0.33) for cars/trucks in both cases. The high improvement in precision/recall resultant from the use of kNN comes at the price, namely, the
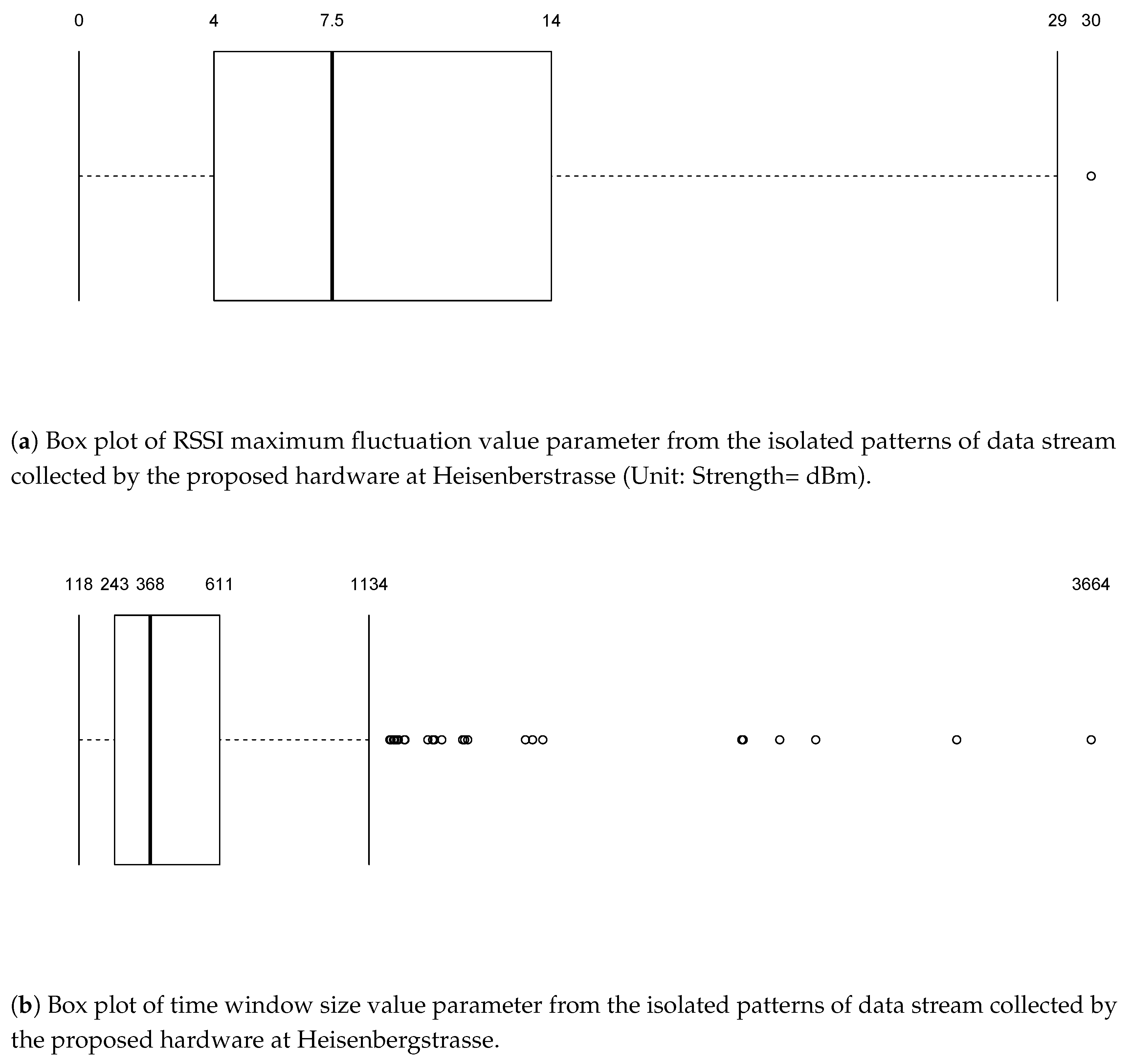
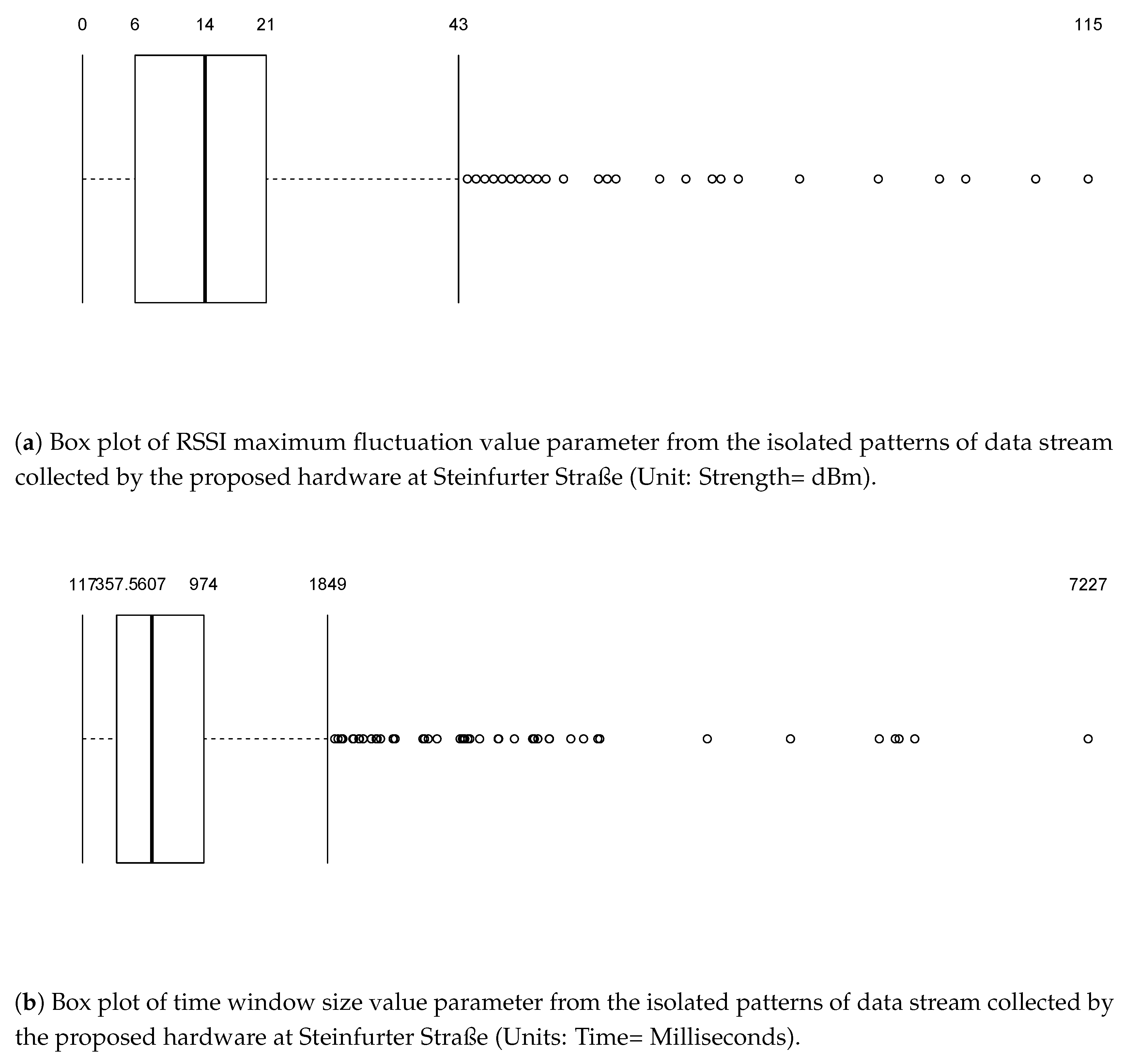
price of training the algorithm for each new context. If this expertise is not available, RSSI and time-based techniques could be used as alternatives. They do not require training for the algorithm and rely on thresholds determined systematically based on summary statistics. The recall values being around 0.33 = 1/3 in the cases of RSSI/time-based detection suggests that RSSI-based and time window-based counts can be used to make
rough estimates about the number of cars/trucks which have been on the street during a time period. For instance, if one would detect 2 cars/trucks with the code, there were roughly 6 cars/trucks on the street; if one has 1000 cars/trucks in the code, roughly 3000 cars/trucks were available in reality, and so on if only threshold values are used without kNN process. Overall, there is evidence from
Table 6 and
Table 7 that the whole approach of using low-cost sensors to count vehicles based on WiFi signals is workable and pertinent on the road towards smarter cities.
One thing worth mentioning regarding RSSI and time window based identification is that though the precision/recall end up being relatively low, the numbers of vehicles identified by the proposed hardware in
Table 4 and
Table 5 are actually quite close to the numbers of the vehicles in the videos (which suggests a good overall accuracy for the technique). The precision/recall values computed subsequently using only the thresholds (
Table 6 and
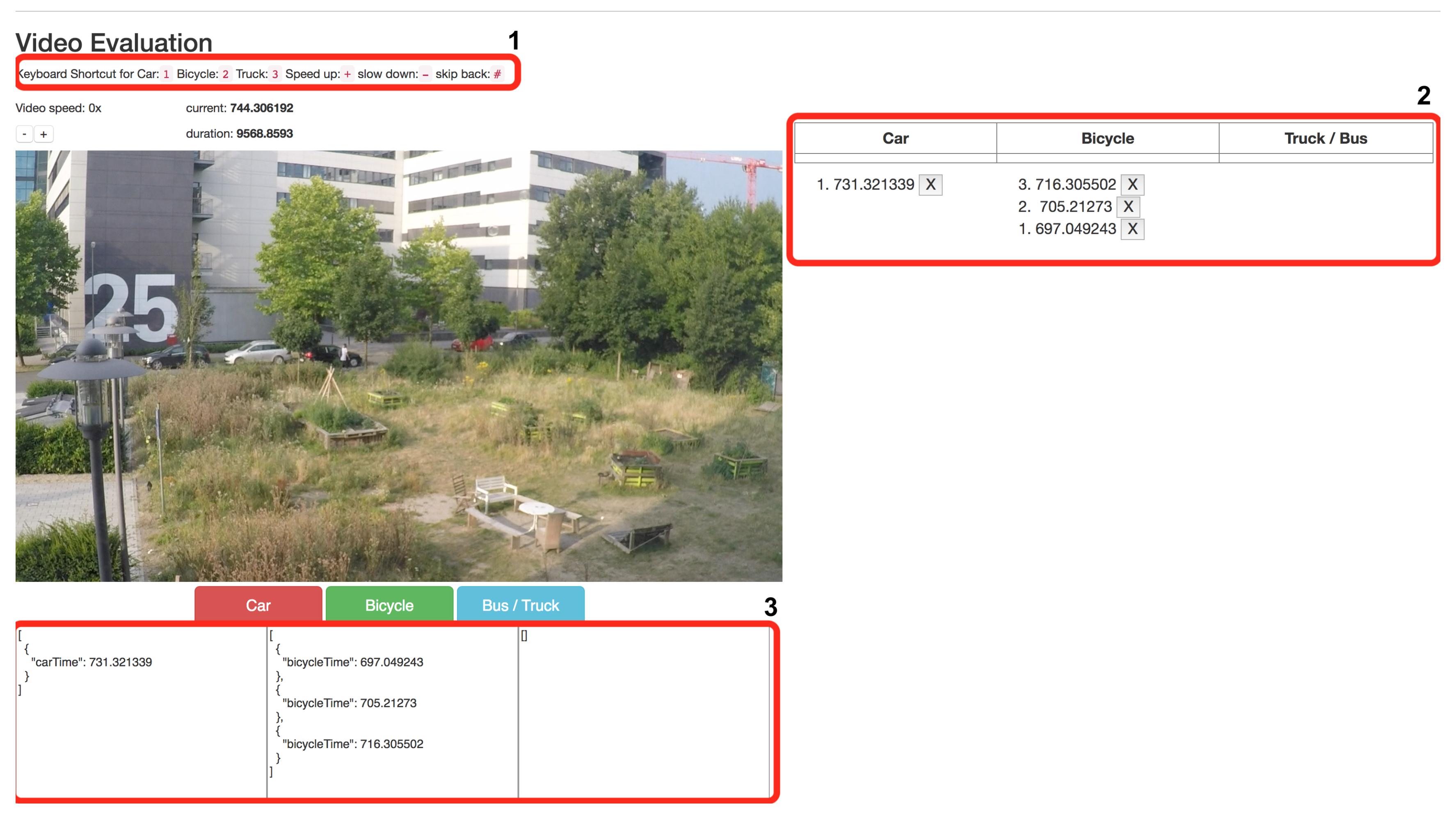
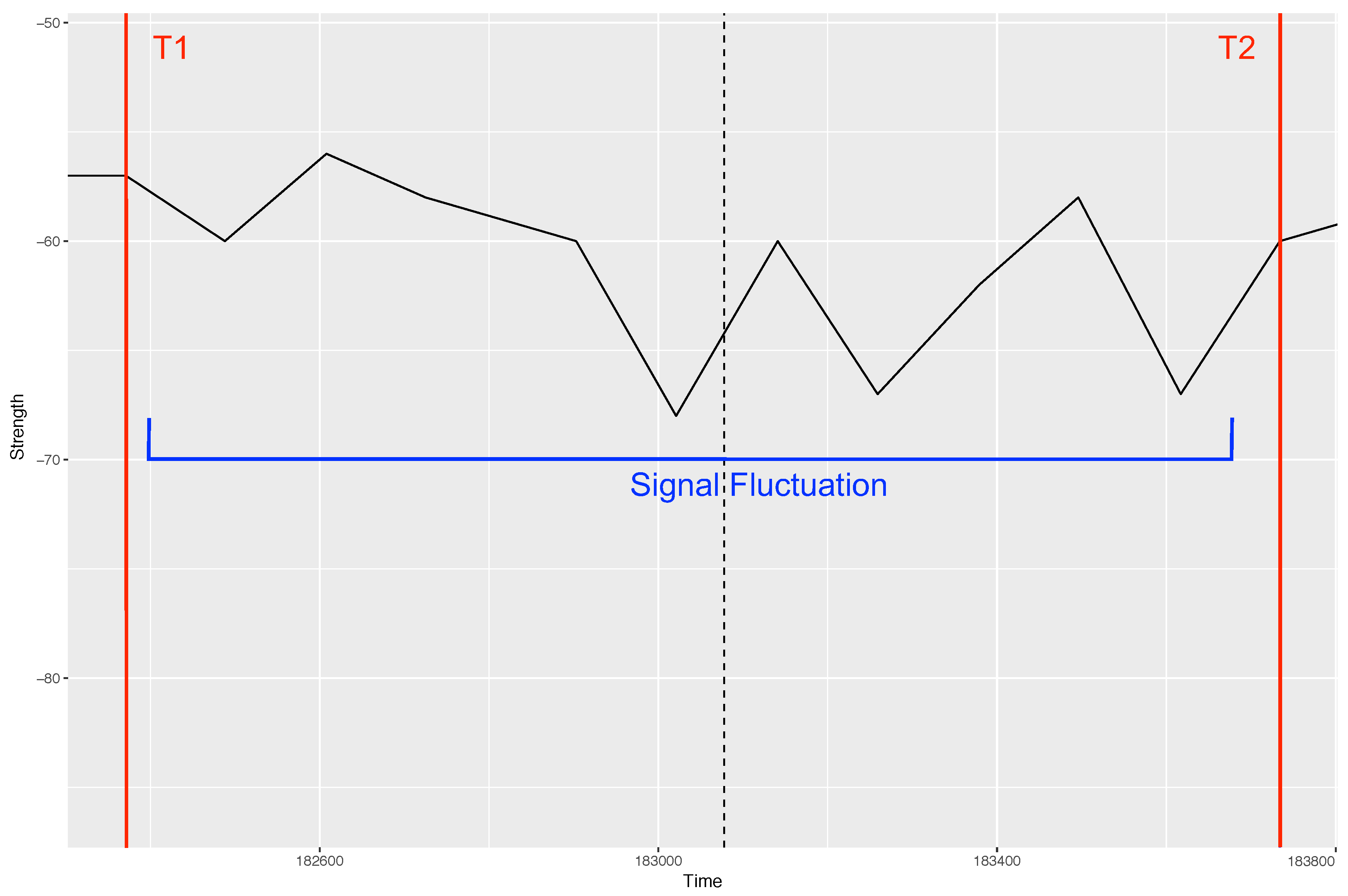
Table 7) led to much lower numbers when it comes to the overall performance. This could be due to the process of computing precision/recall values during the work. An object from the code was said to correspond to an object in the video
if and only if the time
of the video object was within the time window of the signal fluctuation (see
Figure 6). Since the units of measurements were all in milliseconds, and the times
of the video objects were manually identified, there are chances that overlaps between the two were missed by the algorithm. Relaxing the ‘if and only if’ constraint could have led to different values of precision/recall. Furthermore, the precision of bicycle detection (
Table 7) even after using the kNN method for Scenario 2 was very low. This low precision can be because of the high rate of fluctuations in signals due to heavy traffic on the road and the system setup where signal reflection are high, leading to several noisy signals which algorithm interpret as bicycles (as RSSI change by bicycles is small). Hence, the method’s performance to detect small vehicles on the busy roads is limited.
We believe that our system can help in overcoming limitations imposed by traditional existing methods. The proposed system does not require any installation within the road surface or overhead that can lead to hindrance in the normal traffic flow. This helps in overcoming the limitations imposed by various intrusive methods as discussed by Mimbela and Klein [
17]. The proposed system in its current state only stores the WiFi signal data with particular time stamp value, making the data flow easy and less in volume, which helps in overcoming the barriers imposed by low-cost computer vision-based traffic detection methods. Overall the proposed system addresses limitations (i.e., cost, privacy concerns, high maintenance requirements, weather and light effect) imposed by the various methods discussed in
Section 2. Since the system uses WiFi signals, it is tolerant to weather conditions, such as rain or thunderstorms, which is a significant advantage over various computer vision-based devices, ultrasonic devices and related technologies. The proposed approach can also be considered as an excellent fit to overcome performance issues, such as the effect of weather and light condition, pointed out by Balid et al. [
18] for vision-based or radar-based low-cost devices. The system only uses RSSI of WiFi signal to access the vehicles on the road, which can be considered as the simpler version of the approach suggested by Won et al. [
31]. Lastly, the technique proposed does not use any sensitive data, making it privacy-friendly during traffic data collection.
Table 8 presents an assessment of various technologies with respect to the dimensions considered in the present paper, namely: high spatial coverage, insensitivity to weather conditions, low-cost, compactness, usefulness for crowdsourcing and the capability to preserve the privacy of the commuters. ‘High spatial coverage’ concerns the ease of using the technology for widespread, large-scale deployment in a study area. ‘Compactness’ defines the aspect of the compact size of the hardware device, which can help in easy deployment of the system; ‘Relevance to crowdsourcing’ refers to the pertinence of the technology to crowdsourcing scenarios. For example, the Bluetooth technology-based solution proposed by Lewandowski et al. [
35] for traffic monitoring can be useful for crowdsourcing, but the aspect concerning the deployment of mobile phones at the side of roads seems impractical in our view. Hence we characterise it as not so relevant for crowdsourcing in the table.
The system is also subject to some limitations, one major one being its inability to differentiate between noise and objects in a few instances. This can be because of the low power of the WiFi signals. During the study, the system represented slow-moving pedestrians and fast-moving cars as the same object, which lead to a few false vehicle identifications or sometimes even missing the vehicle. The proposed method also has issues concerning the identification of small objects like bicycles on busy roads. The low-cost sensor also showed unusual behaviours at certain temperatures because of heating or ambient temperatures, which could be warrant a closer, more systematic look in future studies. Sometimes the sensor behaves unexpectedly leading to no signals or very high peaks in data. These limitations are inherent to any low-cost sensing device. Another limitation could the fluctuating tolerance of WiFi receiver to specific signal strength, making some of the legitimate peaks of objects as noise in the dataset.
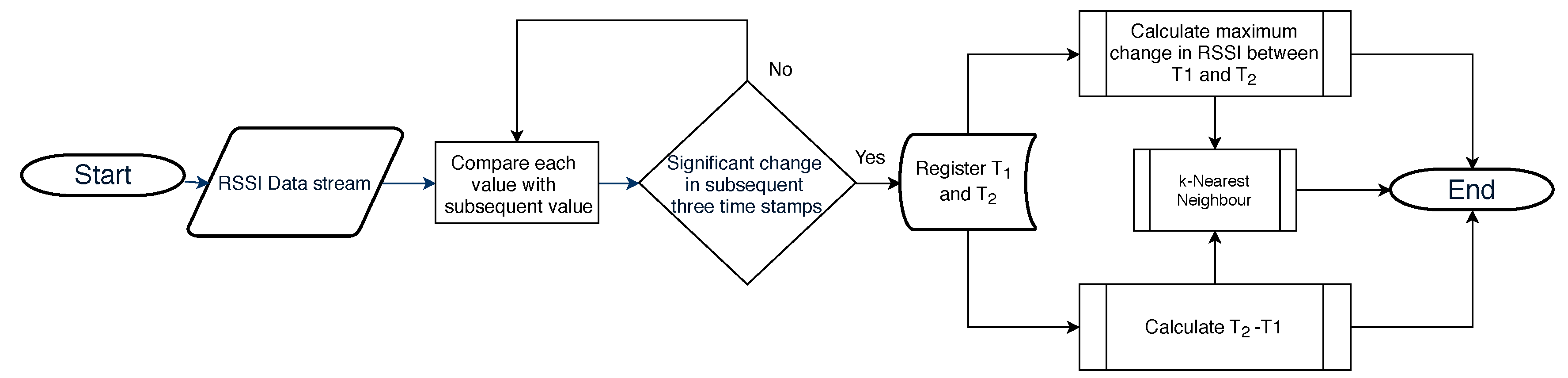
Another critical factor is the identification of the time window for the calculation of the two parameters used in the study. The start and end value identification may be different for different roads, but also significant fluctuations in the signal may lead to selection of different T values. Furthermore, various surrounding situations like the gathering of people or proximity to vehicle parking can trigger changes in values of signal at any point during the deployment. These factors can change the observation value fluctuation to other extreme values, changing the overall start and end time value calculations for time window that can effect the vehicle identification accuracy.
In all, the proposed system is capable of overcoming some limitations which exist in various traffic monitoring methods. It is also useful in addressing the privacy concerns, making the data collection process easy and fast for real-time traffic monitoring. The system’s unresponsiveness to weather condition and luminescence related conditions make this method more advantageous than other sophisticated methods such as vision-based technologies or infrared technologies. The very low-cost of the whole infrastructure ($50) can facilitate the traffic data collection using a large number of devices, enabling better spatial spread for detailed city-level traffic data. The easy deployment capability and operation with generally available WiFi signals make the system useful for crowdsourcing, which can encourage citizen participation and open data collection for open smart cities initiatives.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}