Precisely Automatic Time Window Locating for an Interferometric Fiber-Optic Sensor Array Based on a TDM Scheme

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
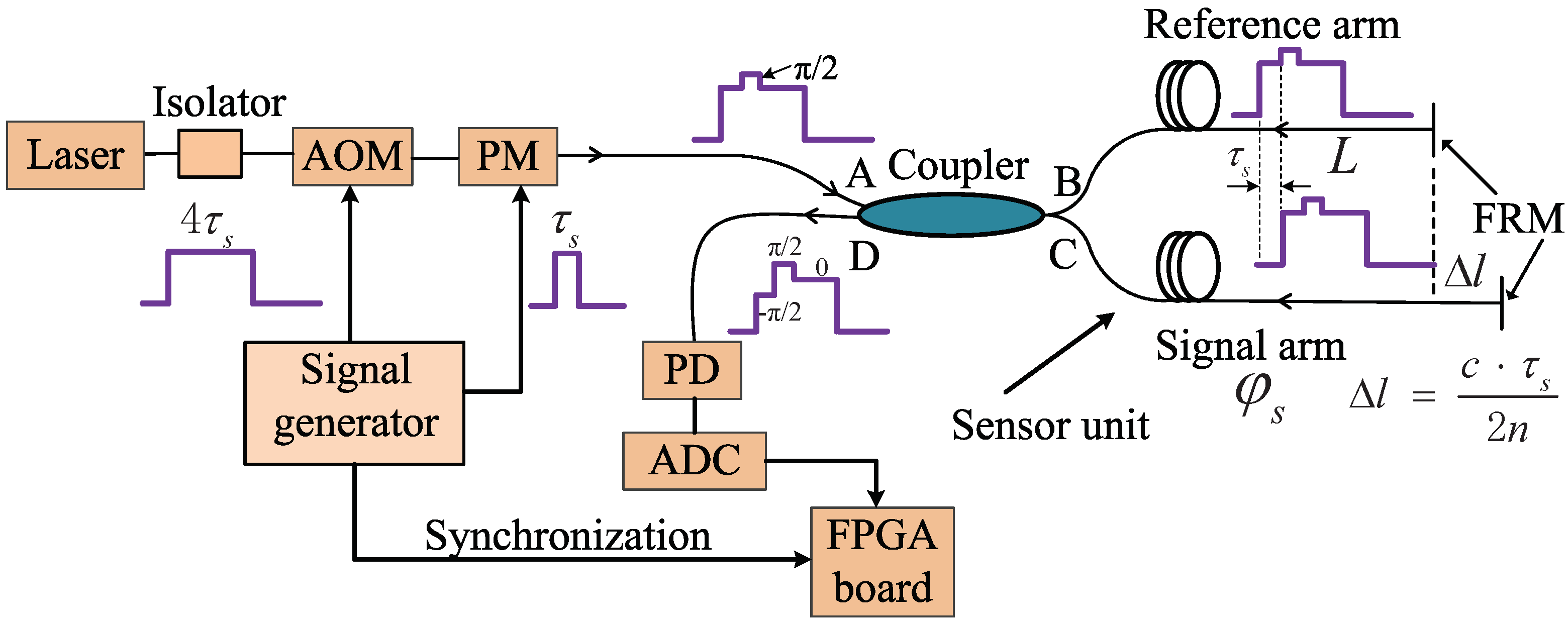
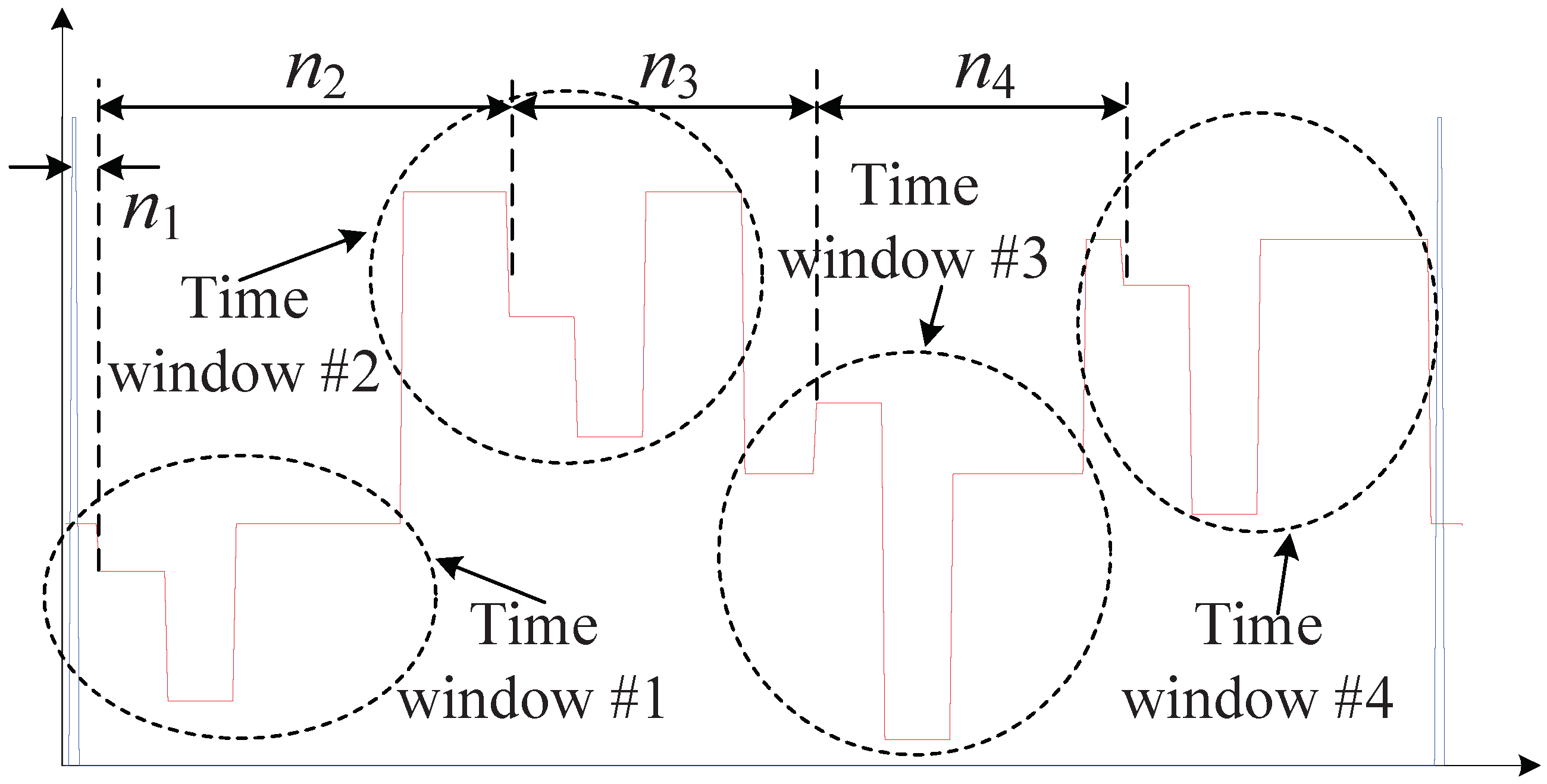
2. Principle of the RPB Scheme and the Sensor Time Windows
3. The Cross-Correlation-Based Automatic Time Window Locating Method
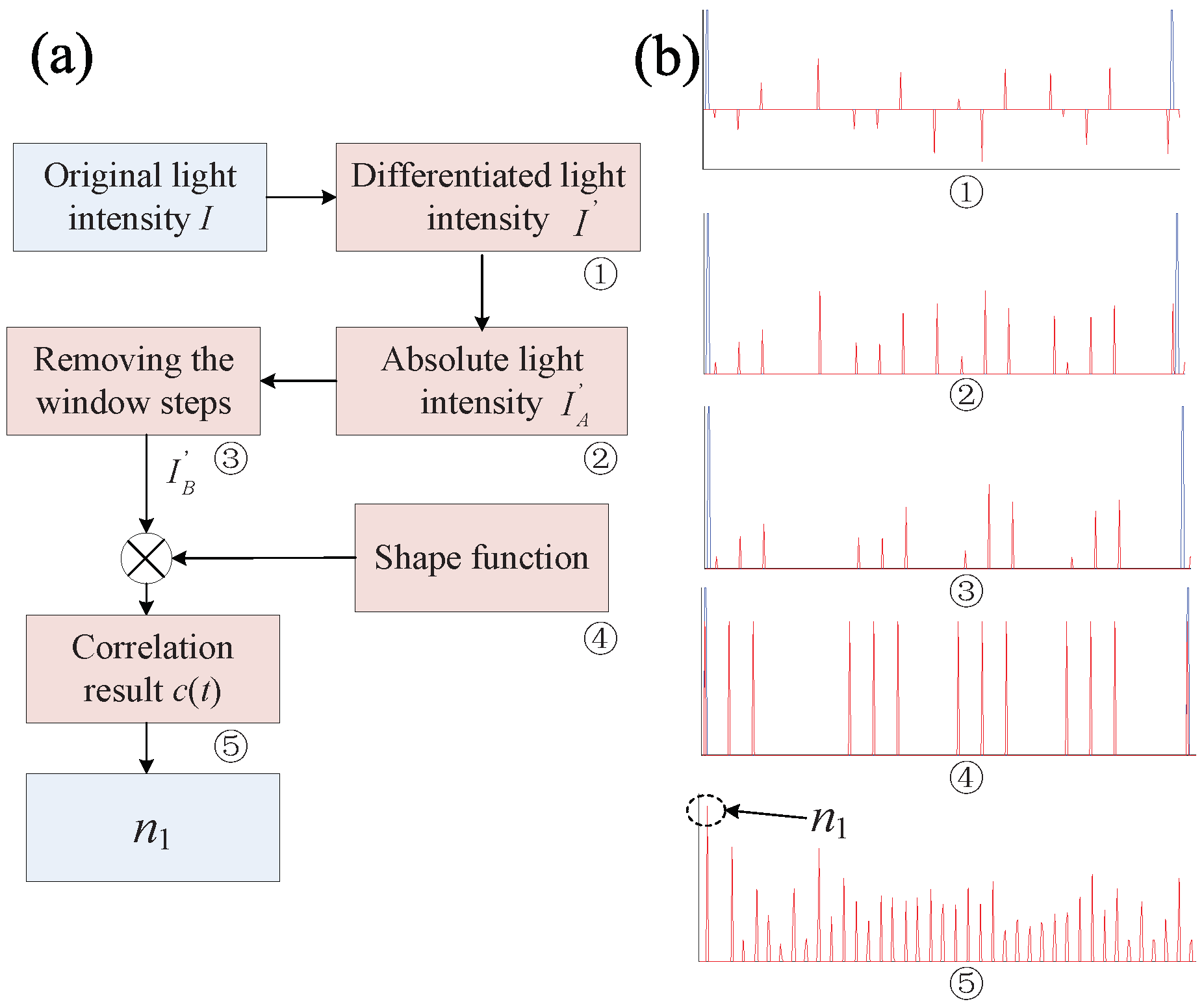
- The original light intensity I is firstly self-differentiated by applying , where is the sampling period of the used ADC. The ➀ subfigure in Figure 3b is obtained from Figure 2. By doing this, the influence of is eliminated, and the main data characteristics that are reflected by the emerging data spikes are emphasized. These data spikes can be divided into two groups: one reflecting the data jump caused by the three encoded phase shifts (called the signal spike), and the other reflecting the data jump caused by the different values for different sensor time windows (called the window spike). Considering that, in the practical sensor system, various types of noises may exist, so a proper threshold value is chosen, and only the data jumps larger than are conceived as valid data spikes.How to choose the proper is dependent on the specific noise performance of the given sensor system. The overall noise may be contributed by the laser source, the optical components (AOM and PM), the effect of the temperature and (or) polarization state change, the electrical circuits (PD and ADC), etc. For the sensor system that applies the TDM scheme, the noise performance deteriorates even more due to the noise aliasing effect [16]. To fully investigate the noise performance of the sensor system is not an easy work and beyond the scope of this paper. References [16,17] give a comprehensive analysis to all of the potential noise sources and their contributions to the overall noise performance. Since most of the noise sources accord with the Gaussian characteristic, we heuristically propose to set , where represents the measured average noise intensity and represents the measured standard deviation of the noise intensity. This can filter out more than 99% fake spikes generated by the noise signal from the valid data spikes. Since the noise signal is independent from time and, according to the random variable theory, the differentiation operation in the method should add the coefficient 2 to the average variable and to the deviation variable . Additionally, to assure that no signal spikes are eliminated so that the following operations can be correctly performed, the following criterion should be satisfied:where denotes the minimum value of the signal spikes. Equation (5) can be guaranteed by choosing low noise component to construct the sensor system (to decrease ) and (or) inserting optical amplifier to enlarge the light power (to increase ).
- The absolute value of is calculated: . The ➁ subfigure in Figure 3b shows the corresponding result.
- The window spikes are removed from to obtain by replacing them with zero value. The window spikes can be easily discriminated from the signal spikes, since each signal spike group contains three spikes with an adjacent spike interval equal to , but the window spike group contains only one single spike and is separate from the signal spikes. The ➂ subfigure in Figure 3b shows the corresponding result.
- A shape function resembling the signal data curve profile (the signal spikes in the RPB scheme) is needed. The function can be described by letting its functional value be one at the spike positions while zero at other positions. It is mathematically defined in the following form:where is the Dirac Delta function, and p denotes the total period number. The is set to 0 to be phase aligned with the synchronization signal. The is defined as holding a very similar function shape as the ➂ subfigure. The ➃ subfigure shows the given and (corresponding to the example curve in Figure 2).
- Correlation operation is applied between and to generate the cross-correlation function , which is:By shifting along the time axis and comparing it with , the is acquired when the two curves overlap. This process can be mathematically accomplished by conducting the cross-correlation operation between the two curves. The is the time tick that gives the maximal value of the cross-correlation result. The ➄ subfigure in Figure 3b shows the corresponding correlation result. This step is the most computation-exhaustive part of the proposed method. Equation (8) holds the computational complexity of for the sensor signal with T data points in total. The T is proportional to the period number p. The p should be set to at least 2 to faithfully calculate Equation (8). Larger p can give more reliable results but result in a longer calculation time. The p can be chosen to be several ones to several tens in practical use.
- Find the time tick that generates the maximal value of , and then .
4. Implementation and Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kirkendall, C.; Dandridge, A. Overview of high performance fibre-optic sensing. J. Phys. D Appl. Phys. 2004, 37, 197–216. [Google Scholar] [CrossRef]
- Lee, B.H.; Kim, Y.H.; Park, K.S.; Eom, J.B.; Kim, M.J.; Rho, B.S.; Choi, H.Y. Interferometric fiber optic sensors. Sensors 2012, 12, 2467–2486. [Google Scholar] [CrossRef] [PubMed]
- Bush, J.; Cekorich, A. Low-cost interferometric TDM technology for dynamic sensing applications. Fiber optic sensor technology and applications III. SPIE 2004, 5589, 132–143. [Google Scholar]
- Ren, Z.; Cui, K.; Li, J.; Zhu, R.; He, Q.; Wang, H.; Deng, S.; Peng, W. High-quality hybrid TDM/DWDM- based fiber optic sensor array with extremely low crosstalk based on wavelength-cross-combination method. Opt. Express 2017, 25, 28870–28885. [Google Scholar] [CrossRef]
- Lo, Y.L.; Chuang, C.H. New synthetic-heterodyne demodulator for an optical fiber interferometer. IEEE J. Quantum Electron. 2001, 37, 658–663. [Google Scholar] [CrossRef]
- Fang, G.; Xu, T.; Li, F. Heterodyne interrogation system for TDM interferometric fiber optic sensors array. Opt. Commun. 2015, 341, 74–78. [Google Scholar] [CrossRef]
- Dandridge, A.; Tveten, A.; Giallorenzi, T. Homodyne demodulation scheme for fiber optic sensors using phase generated carrier. IEEE J. Quantum Electron. 1982, 18, 1647–1653. [Google Scholar] [CrossRef]
- Sheem, S.K. Optical fiber interferometers with 3 × 3 directional couplers: Analysis. J. Appl. Phys. 1981, 52, 3865–3872. [Google Scholar] [CrossRef]
- Her, S.C.; Yang, C.M. Dynamic strain measured by Mach-Zehnder interferometric optical fiber sensors. Sensors 2012, 12, 3314–3326. [Google Scholar] [CrossRef] [PubMed]
- Ren, Z.; Li, J.; Zhu, R.; Cui, K.; He, Q.; Wang, H. Phase-shifting optical fiber sensing with rectangular-pulse binary phase modulation. Opt. Lasers Eng. 2018, 100, 170–175. [Google Scholar] [CrossRef]
- Cui, K.; Li, S.; Ren, Z.; Zhu, R. A highly compact and efficient interrogation controller based on FPGA for fiber-optic sensor array using interferometric TDM. IEEE Sens. J. 2017, 17, 3490–3496. [Google Scholar] [CrossRef]
- Ren, Z.; Wang, H.; Zhu, R.; Xue, Y.; Li, S.; Xu, H. A Fiber Optic Accelerometer with High Sensitivity Based on Two-End Fixed Beam. Laser Optoelectron. Prog. 2016, 53, 20601. [Google Scholar]
- Xu, W.; Cumming, I. Region-growing algorithm for InSAR phase unwrapping. IEEE Trans. Geosci. Remote Sens. 1999, 37, 124–134. [Google Scholar] [CrossRef]
- Ghiglia, D.C.; Romero, L.A. Minimum Lp-norm two-dimensional phase unwrapping. J. Opt. Soc. Am. A 1996, 13, 1999–2013. [Google Scholar] [CrossRef]
- Cheng, Z.; Liu, D.; Yang, Y.; Ling, T.; Chen, X.; Zhang, L.; Bai, J.; Shen, Y.; Miao, L.; Huang, W. Practical phase unwrapping of interferometric fringes based on unscented Kalman filter technique. Opt. Express 2015, 23, 32337–32349. [Google Scholar] [CrossRef] [PubMed]
- Liao, Y.; Austin, E.; Nash, P.J.; Kingsley, S.A.; Richardson, D.J. Phase sensitivity characterization in fiber-optic sensor systems using amplifiers and TDM. J. Light. Technol. 2013, 31, 1645–1653. [Google Scholar] [CrossRef]
- Liao, Y.; Austin, E.; Nash, P.J.; Kingsley, S.A.; Richardson, D.J. Highly scalable amplified hybrid TDM/DWDM array architecture for interferometric fiber-optic sensor systems. J. Light. Technol. 2013, 31, 882–888. [Google Scholar] [CrossRef]
- Lissajous Curve. Available online: https://en.wikipedia.org/wiki/Lissajous_curve (accessed on 8 October 2018).

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, K.; Ren, Z.; Qian, J.; Peng, W.; Zhu, R. Precisely Automatic Time Window Locating for an Interferometric Fiber-Optic Sensor Array Based on a TDM Scheme. Sensors 2018, 18, 3548. https://doi.org/10.3390/s18103548
Cui K, Ren Z, Qian J, Peng W, Zhu R. Precisely Automatic Time Window Locating for an Interferometric Fiber-Optic Sensor Array Based on a TDM Scheme. Sensors. 2018; 18(10):3548. https://doi.org/10.3390/s18103548
Chicago/Turabian StyleCui, Ke, Zhongjie Ren, Jieyu Qian, Wenjun Peng, and Rihong Zhu. 2018. "Precisely Automatic Time Window Locating for an Interferometric Fiber-Optic Sensor Array Based on a TDM Scheme" Sensors 18, no. 10: 3548. https://doi.org/10.3390/s18103548
APA StyleCui, K., Ren, Z., Qian, J., Peng, W., & Zhu, R. (2018). Precisely Automatic Time Window Locating for an Interferometric Fiber-Optic Sensor Array Based on a TDM Scheme. Sensors, 18(10), 3548. https://doi.org/10.3390/s18103548